チーム決定 問題 につ いて
奥 田 和 垂
1.緒 言
二人以上 の個人 が集 まって,共通す 争目的を達成す るために協働 してなん ら かの決定 を下す集団を考 える。集団 に属す る各人 の選好関係 に差異がな く,共 通 の目的を反映す る選好関数が唯一存在す ると仮定できる場合,その集団をチー ムとい う1)。決定 を下す主体が,個人であれ,組織 で あれ,コ ンピュー タの よ うな機械であって も,その下 した決定がなん らかの行動 に反映 され るとき,決 定 を下す主体 の単位を意思決定者 と呼ぶ ことにす る。 このよ うな意思決定者 が 複数集 ま ってチームを形成 しているとすれば,先 の定義 か ら意思決定者 の選好 関係 はすべての意思決定者 について同形 であ るので,各意思決定者 は互 いに協 力 して全員 にとってよ りよい結果が もた らされ るよ うに各 自の選択を行 な う。
これをチーム決定問題 という2)。 チーム決定問題 で,意思決定者間 の情報交 換 が完全 になされ,全員が同 じ情報 を持 っているな らば,それ は意 思決定者 が 1 人 の場合 の最適決定問題 と等価 になる。 したが って, チーム決定問題 は意思決 定者間の情報交換 になん らかの制約がある場合 に意味を持 ち,その情報 交換 の 型,すなわち情報構造 を決定す ることが問題 となる。 このよ うなチーム決定問 題 を研究 す るチーム理論 はMarschak3) によ って始 め られ,Radnerによ って 発展 させ られた1)。 そ こで は主 として静的な問題 が取 り扱 われて いたが,後 に
HoとChllに'よって動的な問題 に拡張 された4)。一方,Witsenhausenは制御 問 題 で情報構造を明確 にす ることが重要であることを指摘 した。 これを契機 に分 散制御 システムの研究が盛んにな ったが,分散制御 システムはチーム決定 問題 と類似 の構造を持っ ことか ら,チーム理論 が制御 の分野 に取 り入 れ られ るよ う にな った。最近で は, チーム理論 にもとづいた コンピュータの並列処 理5)や分
〔61〕
62 商 学 討 究 第41巻 第4号
散処理 の新 しい形態 と して注 目を浴 びているチーム ・コンピューテ ィング (あ るいは協 同型処理 :cooperatingprocessing)6)・7)などが報告 されている。
本論で は, チーム理論 を分散制御 に対す る理論 と してではな く,チームが行 う意思決定 を最適化す るための理論 として と らえ,その理論 と方法 につ いて述 べ る。 次章で は,意思決定者 の数 と目的の数 の関係か ら最適化理論 の分類を行 い, チーム理論 の位置付 けを行 う。次 に, チーム理論ついて述べ,最後 に,簡 単 な生産 システムを例 に取 り,その適用例 を示す。
2.意思決定問題
意思決定者が,自 らの 目的を達成す るために行動 の代替案 の中か ら特定 の行 動 を選択す るとき, これを意思決定 といい8),代替案の選択が意思決定者にとっ
て最 もよい,すなわち最適 な結果が得 られ るよ うに行 なわれ るとき, これを最 適意思決定 とい う。 この最適 な意思決定 を行 な う問題 を最適意思決定 問題 とい い, これ は次 のようである。N人 の意 思決 定者 が それぞれm i,i‑1,‑‑・, Nの代替案 Ⅹ ij,j‑1,‑‑,miを持 って い る とす る。 それぞれ の代替案 が 選択 され ると, その結果 z ij,j‑1,・・・・・・,m iが生 じる. 意思決定者 は, 結 果 に対 してそれぞれの好 みを持 ってい る. この好 み はz ij間 の選好 関係 と し
て表わす ことがで き, この関係 を選好関数¢ i(zij)で表わす。 た とえば,意 思決定者 iが2つの結果zil, Zi2につ いて, zilをzi2よ り選好すれば,選好 関 数 は¢ i(zil, Zi2)>0となる。 zilとzi2が同等 で あれば¢ i(lil, Zi2)‑ 0,
zilとzi2が同等かあるいはzi.を選好すれば¢ i(芝il, Zi2)≧0である。 したが っ て意思決定問題 は,意思決定者 が 自 らの選好関係 の もとで最 もよい結果 を得 る よ うに代替案 を選択す る問題であるといえ る。
上 の意思決定 問題で代替案や結果が数値 と して与 え られていると, これ は数 理計画問題 として記述す ることがで きる。意思決定問題 を数理計画問題 として 記述す ると次 のよ うにな る。代替案 には,満 たすべ き制約giが規定 されて お り,その制約 を満 たすすべての値が代替案であ るとす る。 これ より代替案 の集 合Ⅹiは次 のように書 くことがで きる。
チーム決定 問題 につ いて 63
Ⅹi‑(Ⅹi:gi(Ⅹi)≦0) (1)
結果 は, ある代替案 に対 して得 られるので,その関係 を関数 fiで表 わす と結
果 の集合Ziは,
zi‑‡zi:軍i‑fi(Ⅹi)) (2)
と書 ける。意思決定者が最 も大 きな値を持っ結果を選好す るとすれば,これ は Ziの中か ら最大のziを選ぶ ことを意味す る。すなわち
MAX.(zi:ZiEZi) (3) である。 最大のziを選ぶ ということは,̲fiを最大 にす るⅩiを選 ぶ ことと等価 である。 したが って式(3)は
MAX.fi(Ⅹi) (Ⅹi)
となる。以上のことより,意思決定問題を数理計画問題 として記述す ると, 式 (1)を制約条件 とし関数fi(Ⅹi)を最大化す る問題 として次 のように書 くことが で きる。
MAX.fi(Ⅹi) (5) S.T.xi∈Ⅹi‑(Ⅹi:gi(Ⅹi)≦0) (6)
ここでⅩiは意思決定者iの決定変数,fi(Ⅹi)は目的関数 で あ る。 以下 の議論 で,Ⅹiはコンパ ク ト凸集合,fiはⅩiに関 して凹関数 で,Ⅹに関 して微分可能 な連続関数であるとす る。
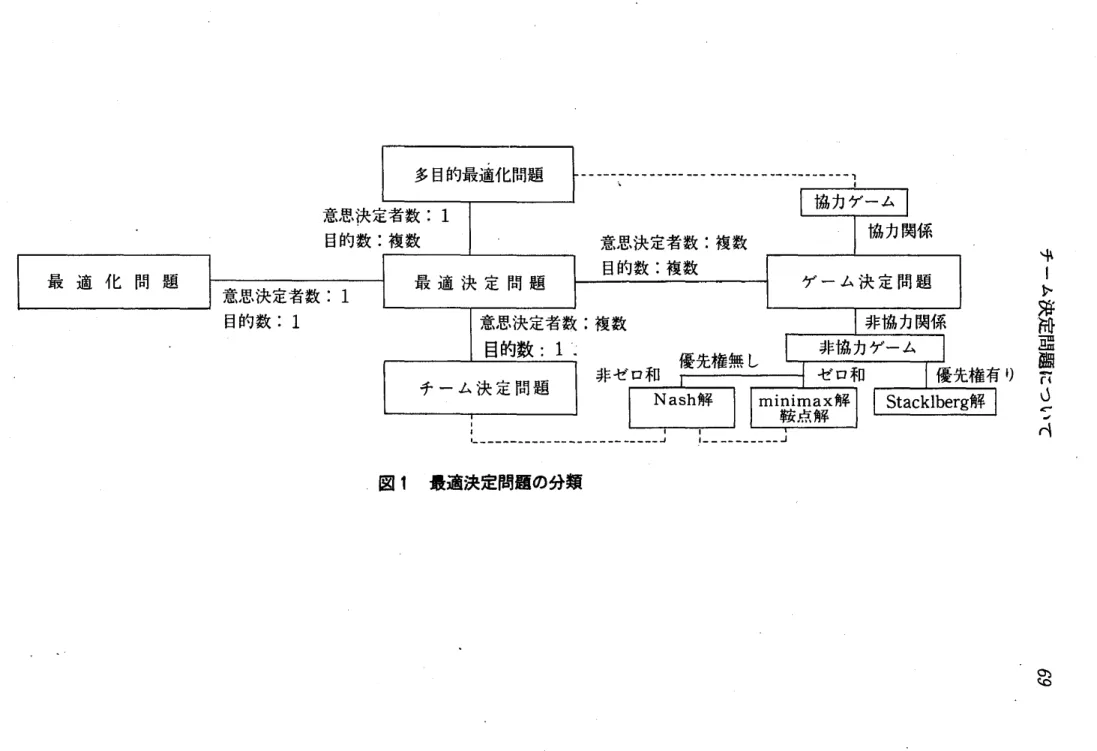
意思決定問題 は,意思決定者の数 と目的関数 の関係 によって以下のよ うに分 類す ることがで きる。
I.最適化問題
意思決定者が1人 (N‑1)の場合,式(5),(6)は次の最適化問題 になる。
MAX.f(Ⅹ) (7)
S.T.g(Ⅹ)≦0 (8)
この問題 に対す る最適化手法 としては,数多 くの手法が提案 されてお り9), こ こで は省略す る。
Ⅱ.多 目的最適化問題
意思決定者が1人の場合であ って も, その意思決定者が複数 の目的を持 って
64 商 学 討 究 第41巻 第4号 いるとき,次 の多 目的最適化問題 とな る。
MAX.(fl(Ⅹ),f2(Ⅹ),I‑‑) S.T.g(Ⅹ)≦0
この多 目的最適化問題 に対 して は, 目標計画法 や対話型最適化法 な どの最適化 手法が提案 されている10)0
式(9),(10)のよ うな多 目的最適化 問題 で は,す べ て の 目的 を同時 に達 成 す るよ うな最適解 は一般的 には存在 しない。 この よ うな問題 で は, 解 はPareto 最適解 (あ るい は非劣解 :non‑inferiorsolution)とな る。Pareto解 は, す
くな くと も他 の1つ の 目的を減少 させ ることな くして, ある目的を増加せ しめ ることがで きない解 で ある。 す なわち,式(9),(10)の問題 で,すべてのiに対 してfi(Ⅹ)≦fi(Ⅹ'),かつ い くつ か のiに対 してfi(Ⅹ)<fi(Ⅹ*)な る任 意 のⅩ が存在 しないな らば,またその ときにのみ Ⅹ*はPareto解であ る。
Ⅱ.ゲーム決定問題
複数 の意思決定者 が存在 し,それぞれが 目的 を持 っている場合,あ る意 思 決 定者 の決定 が他 の意思決定者 の決定 に影響 を与 え るな らば,その意思決定 問題 はゲーム決定問題 とな る。 この決定問題 は,意思決定者iの決定問題 と して次 のよ うに定式化 で きる。
MAX.fi(Ⅹ) (ll)
S.T.gi(Ⅹ)≦0 (12) この問題 に対す る理論 と してゲーム理論11)が ある。 ゲームの理論 で は, 各 意 思決定者 がその とるべ き戦略 を合意 の上 で決定 す る協力 ゲームと,意思決定者 が互 いに競合 している場合 の非協力 ゲームがあ る。 協力 ゲームには, 2人交渉 ゲームや特性関数形 (提携形) ゲームな どがあ る。 意思決定者全員 が協力 して 決定 を行 な う場合 ,それ は多 目的最適化問題 と等価 にな る。
非協力 ゲームには,意思決定 に優先権 があ る場合や,ゼ ロ和/非 ゼ ロ和 ゲ ー ムな どが あ る。
1)Stackelberg解
意思決定 に優先権 があ る場合 で,優先権 があ る意思決定者 の決定 を他 の意思
チ‑ム決定問題 について 65 決定者が知 って 自 らの決定 を行 な う。 これを説明す るために,意思決定者が2 人 の場合で,意思決定者 1に優先権があ る場合 を考える。 意思決定者 1の決定
Ⅹ;∈Ⅹ iが与え られたとき,意思決定者2は,
f2(Ⅹr,Ⅹ2')≧f2(Ⅹ1',Ⅹ2),Ⅹ2∈Ⅹ2 (13) とな るよ うに Ⅹ2'‑T(Ⅹ1')を選ぶ. ここでTは任意 の関数 であ る. この とき
fl(Ⅹ1',T(Ⅹ1'))≧fl(Ⅹ1',T(Ⅹ1)),Ⅹ1∈Ⅹ1 (14) とな るような Ⅹ1'∈Ⅹ1,Ⅹ言‑T(Ⅹ1')が存在すればⅩ2'∈Ⅹ2はStackelberg解 で あ る。
2人 の意思決定者 の最適化 問題 は,具体 的には次 の よ うにな る。 任意 のⅩ㌢
∈Ⅹ1に対す る意思決定者 2の最適化問題 は,
MAX.f2(x10,x2) (14) S.T.g2(Ⅹ10,Ⅹ2)≦0 (15)
であ る。 これを最適 にす るためにLagrange関数 を次式で定義す る。
L2(Ⅹ10,Ⅹ2,Å2)仝 f2(Ⅹ10,Ⅹ2)+ 入短 2(Ⅹ10,Ⅹ1) (16)
これよ り,意思決定者2が最適決定 を得 るためのKuhn‑Tuckerの必要条件 は,
∂L2 ∂f2(Ⅹ10,Ⅹ2') ̲̲∂g2(Ⅹ10,Ⅹ2.)
∂Ⅹ2 ∂Ⅹ2
∂L2
∂ ス2‑g(xlO,x2')‑0
∂Ⅹ2 ‑0 (17) (18) であ る。 優先権 のあ る意思決定者 1の最適化問題 は,式(17),(18)を考慮 して 次のようになる。
MAX.fl(Ⅹ1,Ⅹ2)
S.T.gl(Ⅹ 1,Ⅹ 2)≦O
g2(Ⅹ 1,Ⅹ 2)‑0
∂f2
∂Ⅹ2.A盲壁 =o
∂Ⅹ2 この問題 のLagrange関数 は,
Ll(Ⅹ1,Ⅹ2,人2,〟1,IL2,Z/1)仝fl(Ⅹ1,Ⅹ2)+ FLTgl(Ⅹ1,Ⅹ2) EiidgCid901122(ZqiZqnⅦMu )22qtMU
66 商 学 討 究 第41巻 第4号
+ zjTg2(Ⅹ1,Ⅹ2)+LL首(∂f2/ ∂Ⅹ2+ ス盲∂g2/ ∂Ⅹ2) (23) となる。Kuhn‑Tuckerの必要条件 は,
∂Ll ∂fl(Ⅹ1',Ⅹ2') ̲ ∂gl(Ⅹl',Ⅹ2')
∂Ⅹ1 ∂Ⅹ1 ∂Ⅹ1
∂ ′ ∂f2(Ⅹ1',Ⅹ2') ∂g2(Ⅹl',Ⅹ2+)
・躍 ÷∂Ⅹ1\( ∂Ⅹ2
∂L1
‑ ‑gl(Ⅹl+,Ⅹ2')‑0
∂〟l
aLl af2(xl+,x2*)
∂〝2 ∂Ⅹ2
∂L1
‑ ‑g2(Ⅹ1',Ⅹ2')‑0
∂g2(Ⅹl',Ⅹ2')
∂Ⅹ2
∂Ⅹ2
8g2(xl',X2')
(26)
(27) aLIL
である。 この必要条件 で,x2*とÅ2*は意思決定者 2の最適化 問題 の必 要条 件 (式(17),(18))よ りⅩ1の関数,た とえばⅩ2'‑T(Ⅹ1),Å2'‑H(Ⅹ1)と して記 述 で きるので,式(24)〜(27)はⅩl,ILL,FL2,ン1につ いて解 けば よい。 ここで T(*)とH(*)は任意 の関数 である。
2)2人 ゼ ロ和 ゲーム
2人 ゼ ロ和 ゲームは意思決定者 が2人で, 2人 の目的関数 の和がゼ ロ,すな わ ちf1‑f2‑0の場合である。 これは,意思 決定者 1の意思決 定 問題 が最 大 化問題であれば,一方 の意思決定者2の意思決定問題 は最小化問題 になる。 そ してその目的関数 の最適値 は一致す る。 この関係 は次式で記述す ることがで き る。
f(Ⅹ18,Ⅹ2)≧f(Ⅹlt,Ⅹ2')≧f(Ⅹ1,Ⅹ2'),∀Ⅹ1∈Ⅹ1,∀Ⅹ2∈x2 (28) これを満 たすⅩr,Ⅹ2+を鞍点解 とい う.式(28)は等価的 に次 のように書 ける.
f(Ⅹ1',Ⅹ2')‑maXmi nf(Ⅹ1,Ⅹ2)‑minmaxf(Ⅹ1,Ⅹ2) (29)
Ⅹ1 Ⅹ2 Ⅹ2 Ⅹ1
鞍点解が存在す るための必要十分条件 は, 式(29)が等号 で成 り立 っ ことで ある。 これが不等号で成 り立っ場合 に は鞍点解 が存 在 せず, この と きの解 は
チーム決定問題について minimax解 とな る。
意思決定者 の最適化問題 をそれぞれ次 のよ うであるとす る。
意思決定者、1 :M AX.fl(Ⅹ1,Ⅹ2)
S.T.gl(Ⅹ1,Ⅹ2)≦0
意思決定者 2 :MIN.f2(Ⅹ1,Ⅹ2)
S.T.g2(Ⅹ1,Ⅹ2)≦0
そのLagrange関数 はそれぞれ次 のよ うである。
Ll(Ⅹ1,Ⅹ2,Al)仝fl(Ⅹ1,Ⅹ2)+ATgl(Ⅹ1,Ⅹ2) L2(Ⅹ1,Ⅹ2,人2)仝f2(Ⅹ1,Ⅹ2)+ス盲g2(Ⅹ1,Ⅹ2) これよ り鞍点解 が存在す るための必要条件 は次のよ うになる。
aLl afl(xl',x2+) agl(xl*,X2')
∂Ⅹ1 ∂Ⅹ1 ∂Ⅹ1
∂Ll
811‑gl(Ⅹ;,Ⅹ言)‑ 0
aL2 8f2(xl',X2') 8g2(xl+,X2')
∂Ⅹ2 ∂Ⅹ2
∂L2
81 2
‑g2(Ⅹ;,Ⅹ28)‑ 0
∂Ⅹ2
EiidEidgEO1233333iZqJqnlUdZq
‑ 0 (34)
(35)
‑ 0 (36)
(37) 3)非 ゼ ロ和 ゲーム
非 ゼ ロ和ゲームで意思決定者がN人 い る場合,各意思決定者 の最 適 な決定 はNash解 になる。.Nash解 は,他 の意思 決定者 がNash解 を採 用 して い ると き, いずれの意思決定者 も自己の解 を改良す るような解が存在 しない均衡解 で ある。 これ はすべてのⅩi∈Ⅹi,i‑1, ‑ ‑‑‑,Nに対 して,次 のよ うに書 くこ
とがで きる。
fi(Ⅹ1',‑・・・,Ⅹトl,Ⅹi,Ⅹ+i.I, ・・・ ・‑・・,Ⅹ蒜)≦fi(Ⅹl',・・・‑‑,Ⅹ蒜) (38) 意思決定者iの決定問題 が式(ll),(12)の形で与 え られているとき,Lagrange 関数 は
Li(Ⅹ1,.・・・‑,ⅩN,Ai)仝fi(Ⅹ1,・・‑・,ⅩN)+lTgi(Ⅹ1,‑‑,ⅩN) (39)
68 商 学 討 究 第41巻 第4号
となる。 これよ り式(38)を満たすNash解 は,次 の必要条件
∂Li ∂fi(Ⅹ;,・・‑・・,Ⅹ&) ̲ ̲∂gi(Ⅹl',・・・‑,Ⅹ蒜)
∂Ⅹi ∂Ⅹi
∂Li
∂Ai‑gi(Ⅹl',・・・・‑,Ⅹ晶)‑0 を満たすⅩ;∈Ⅹi,i‑1,‑‑‑,Nである。
∂Ⅹi ‑ 0 (40)
(41)
Ⅳ.チーム決定問題
意思決定者が複数人で,各人 に共通 した目的がただ 1つ存在す る場合,す な わ ちfl‑f2‑・‑‑‑fN‑fであるとき,その決定問題 はチーム決定問題 となる。
これは,
f(Ⅹ1',‑・・・・,Ⅹ苗)‑ max f(Ⅹ1,‑‑,ⅩN)
Ⅹ1,‥‥‥,ⅩN
(42)
であるようなⅩ‡∈Ⅹi,i‑1,‑‑,Nを見つける問題 となる。 これは規模の小 さな問題を除いて直接解 くことは困難である。 チーム決定問題 は,ある意思決 定者 の決定が他の意思決定者 の決定 に独立であると仮定 し,そのときの最適解 : person‑by‑person最 適 解 (pbp最 適 解 ) を求 め る こ とで最 適 化 さ れ る。
pbp最適解 を得 るための必要条件 は, f(Ⅹl',‑‑,Ⅹ'i‑1,Ⅹ'1,Ⅹ'i.I,‑‑,Ⅹ蒜)
≧f(Ⅹl',‑・:・,Ⅹ'i‑1,Ⅹi,Ⅹ'i.1,・・・・・・,Ⅹ苗) (43)
であるO これは先 のNash解 の定義式(38)と同 じ形である. したが って, チー ム決定問題 のpbp最適解 は非ゼ ロ和N人非協力ゲー ムで各意思決定者 が持 つ 目的が共通す る 1つの目的にな った場合であると考え ることがで きる。 さらに チーム決定問題を多 くの意思決定者の中のN人 が協力 して 目的 を達成 す るた めに決定 し行動す る問題であると解釈すれば,これはゲーム理論での協力 ゲ ー ムの特殊な形であるといえる。
以上の各決定問題 の関係を図示す ると,図1のようである。
し̲̲̲̲̲ー̲̲̲」
図1 最適決定問題の分類
叫‑ト・芳村P.,1
勧 告
JナノT口髭70 商 学 討 究 第41巻 第4号
3. チーム決定問題 3.1.チーム理論
MarschakとRadnerによ って与 え られたチーム理論 は, 全 体 の 目的が与 え られた とき各意思決定者が協同 して, その目的を達成す るにはどのよ うな情報 交換を行 うべ きかを対象 とす るものであ った。 そこでは, チームに属す る意思 決定者 (メ ンバ ー)間の情報交換を規定す る情報構造 と, その情報構造 の もと での決定規則 を決定 している。決定規 則 は, 式(43)のpbp最 適解 に よ って得
られ る。 システム全体 の最適解 がpbp最適解 であれば,個 々の意思決定者 につ いて もそれは最適である。 逆 に個々の意思 決定者 につ いてpbp最適 解 が得 ら れていて も, それは必ず しも全体 の最適解 とはな らない。 したが って, システ ム全体 の最適解 はpbp最適解 の中に存在す る。 他方,情報構造 は一般 には離散 的な集合で表わ され るので,最適 な情報構造 は通常 の解析的な手法 によって求 めることはで きない。
Marschakらによって与え られたチーム理論 は動的な要素,す なわ ち時 間 を 考慮 にいれていない静的な問題 を対象 に しているので静的チーム決定問題 と呼 ばれて いる。 静 的な場合,意思決定者が下す決定 は他 の意思決定者 の決.定 に影 響 を及 ぼす ことはない。 この静的チーム決定 問題 はHo,Chu4) によ って動 的 な場合 に紘張 された。 この間題 は動的チーム決定問題 と呼ばれ,ある時刻 にお ける意思決定者 の決定 によって システムの状態が変化す るので,時間の経過 と ともに状態 の変化 を通 じてある意思決定者 の決定が他 の意思決定者 の決定 に影 響 を与え る。 動的要素 を考慮 にいれたチーム決定問題であ って も, システムの 状態が意思決定者 の決定 に影響 されない場合が考え られ る。 この場合 には,各 時刻 の各意思決定者 を新 たな意思決定者 と考 えることによって静的チーム決定 問題 とす ることがで きる。 この決定問題 を準静的チーム決定問題 とい う。
チームに属す る意思決定者iが システムの状態yを観測す ることによ って な ん らかの情報ziを得 る。 これを
zi‑l i(y),i‑i,・・・・・・,N (44)
チーム決定問題 について 71 で表わす。 この情報 を意思決定者間で交換す ることによって意思決定者iは,
ui‑Pi(zi)‑Pi(li(y))‑ qi(y),i‑1,・・・・・・,N (45) なる情報 を得 る。通常 ,状態 の観測 と情報 の交換 には外乱を ともな う。 この情 報 に もとづいて意思決定者iは意思決定
Ⅹi‑ γi(ui)‑ γi(77i(y)),i‑1,‑‑,N (46) を行 な う. ここで,符iを情報関数 あるいは情報構造 と呼 び,γiを制御関数 あ
るいは意思決定関数 といい,さきの決定規則である。
状態 の観測や情報交換 にはそれな りの費用が必要 で, これ らの費用 は情報構 造 や外乱 に依存 している。 したが ってチーム理論 における目的関数 は,式(45),
(46)を考慮 して次 のよ うにな る。
f(γ1,・‑‑,γN,符1,‑・・・, 17N)あるいはf(γ1,・・‑・,γN) (47) さきに述べたようにチーム決定問題で は, この目的関数 を最適 にす るよ うに 情報構造 77iと意思決定関数 γiを決定す るものである.
3.2.情報構造
最適 な情報構造 を解析的手法で求 めることは困難であるので,考 え られるす べての情報構造 に関 してその評価値を求 め,その中か ら最適 な情報構造 を決 定 す る。 これを行 うために情報構造を意思決定者が情報を持っか持たないかによっ て1か 0の値 を とる要素 によ って表す ことにす る。すなわち,
qi,・‑(三意思決定者そ の 他 iが情報 yjを持っ とき i‑1,‑‑,m (48)
ここでm は情報 の個数であ る. これを用 いて意思決定者 iの情報構造かiとチー ム全体 の情報構造77を
符i‑ [77il,・・・‑,77iN]T,i‑1,‑‑,N (49) 77‑.[符i],i‑1,‑‑,N (50) で表す。m‑Nの とき, 77はN人の意思決定者 に対 して 2"雪組 存在 し,N の増 加 とともにその数 は急速 に増加す る。 と ころで情 報yiは意思決定者iのみが 持 ってお り,他 の意思決定者が この情報 を受 け取 ることがで きるのは意思決 定
72 商 学 討 究 第41巻 第4号
者iのみか らであるとす る。 これは情報yiに関 して意思決定者iのみが専 門家 で,他 の意思決定者が情報yiを直接得 るには意思決定者iが得 る場合 に比 べ て非常 に高い費用を要す る場合である。 このような特別な制約を課すことによっ て,検討すべ き情報構造の数を減少 させることがで きる。 これは次のように表 す ことがで きる。
叩 ij‑0‑ 77ji‑0,i,j‑1,・・・‑,N (51) たとえばN‑2の とき情報構造 77の組合せ は16組存在す る. 式(51)の制約 を課 す と組合せは次 の9組 になる。
[: :日 : :日 : :日 : :日 : ;日 : :廿 日 : :日 : :]
Marschakらは式(50)で表 される情報構造を次のように分類 している1)0
①集中型情報構造 :どの意思決定者 も同 じ情報構造(771‑,・‑・・,‑ 77N)を持 つ場合で,ll‑ である。
②分散型情報構造 :各意思決定者が異 なる情報構造を持つ場合で,T1‑
である。
③集中型不完全情報構造 :情報が特定の意思決定者 に集中 している場合で,他 の意思決定者 はこの意思決定者か らのみ情報 を得 ることがで きる. この場合か
‑ [11.0巨 るいは 〔:11巨 あやo
④無情報構造 .・情報が全 く得 られない場合で,77‑
・=:i;二である。
Marschakらは例 を用いて, これ らの情報構造 に対 して観測費用 と情報交換費 用 を考慮 した評価を行 い最適 な情報構造を決定 している。
3.3.静的チーム決定問題
静的チーム決定問題 は3.1節 の式(44)〜(47)のようであるが,状態 の観測 や
チーム決定問題 について 73 情報 の交換 にともな う外乱 は,主観確率 あ るいは客観確率 のどち らかの意味で 確率的である。 したが って与 え られた情報構造 符の もとで,最適 な意思決定関 数 は, γi∈r iに対 して
J(71',‑‑,γ蒜)‑ max J(γ 1,・・・・‑,γN)
γ 1,日●●日,γN
= maX
rl,HHH,rNEf(7 1,‑‑,γN)(52)
で決定 され る。 ここで
r
iは意思決定関数 の集合でⅩiを規定す る。pbp最 適解 の必要条件 (式(43))よ りJi(γl',‑‑,γ‡‑1,γ i,γ‡+1,‑‑,γ蒜)
‑Ef(γ1',・‑・・,γ'i‑1,γ i,γ:+1,・・・‑,γ苗) (53) であるので,式(46)よ りこれを γi∈r iについて最適 にす ることは,
maxJi‑maXEf(71',・・・・・・,γ'i‑1,Ⅹi,γ'i.I,‑‑,γ晶) (54)
Ⅹi Xi
を Ⅹiについて最適 にす ることと等価であ る。
Ho,Chuは, 目的関数fが凸関数 で あ るときJの局所最適解 が全体 的最適 解であることを示 している4)。 いまfが次 のような2次関数 であるとす る。
f(y,Ⅹ1,‑‑,ⅩN)‑y2ⅩTQx+ⅩTRy+cTx (55) ここゼ Ⅹ‑(Ⅹ1,・‑・・,ⅩN)T,Q,R,Cは適当な次元 の行列 とベ ク トルで あ る.
HoとCht=こよ って与 え られた必要条件 は,すべてのiに対 して
∂Ji (56)
∂Ⅹi
が成 り立っ ことであ る. これよ りすべての ui,i‑1,‑‑,Nにつ いて
Qiiγi+ ∑ 丁=lQijE(γjlui)+RiE(ylui)+ci‑0 (57)
j≒i
を得 る。 yと uiの確率分布が正規分布であれば,意思決定関数 は次 の線形 関数 になることが知 られている12)0
Ⅹi‑ γ(ui)‑Aiui+bi (58)
74 商 学 討 究 第41巻 第4号
Aiとbiは式(58)を式(57)に代入す ることによって得 ることがで きる。
3.4.動的チーム決定問題
動的チームは,静的チームに時間要素 を考慮 にいれ動的な場合 に拡張 した も のである。 Ho,Chuは時刻k,k‑1,・‑‑,Kにおいて意思決定 す る意思決定 者iを意思決定者ikとし,意思決定者数NKを改 めてNと して, その意思決 定者間に意思決定 の先行関係 と包含関係を導入 して いる。Ⅹjがuiに影響 をお よぼす とき,意思決定者jは意思決定者 iよりもさきに意思決定 す る ことを意 味する。 この意思決定の先行関係 を半順序 関係 (く) を用 いてjくiのよ うに 表す。一方,意思決定者iが 自分の情報uiを通 じて意思決定者 ]'の情報ujを知 ることがで きるな らば,uiはujを包含す るという.j<iなるすべてのi,jに対 してuiがujを包含 すれば,情報構造 77はpartiallynested(PN)とい う。 PN 情報構造 を持っ動的チームでは, その情報構造 は次のような線形関数 として与 え ることがで きる。
ui‑Hiy+ ∑ :・‑=11DijXj (59)
ここでHiとDiiは適当な次元 の行列ですべての意思決定者 に対 して既知 で あ る。 行列Dij≒0であれば,意思決定者jの決定 は意思決定者iの情報 に影響 を 与え,j<i,Dji‑0を意味す る。 静的チームの場合,情報構造 はui‑Hiyで
ある。
いま次 のようなLQG問題,すなわちシステムの状態方程式 が線形 関数,冒 的関数が2次関数,外乱が正規分布 に従 う場合の問題を取 り上 げる。
MAX.J‑E[%yNT.ISyN. 1+y2∑ご =1(yTBTByi+ⅩTRxi)] (60)
S.T. yi+1‑Fyi+Gxi+wi (61) さ らに意思決定者iの観測 は
‑zi‑Cyi+vi であ り,その情報構造 は
ui‑Hit+ ∑ ji=‑1lDijXj
(62)
(63)
チーム決定問題 につ いて 75 であるとす る. ここでE‑(yl,W1,‑‑,WN,V1,‑‑,VN)T,F,G,Cは通 当な次元 の行列,ylは初期状態,wi, viは外乱である。
式(61)をyiにつ いて解 き,yl,Wi,Ⅹiの関数 として表す と
yi‑Fトlyl+∑ji=‑1lFi‑1j(Gxj+wj) (64)
となる。 これを式(62)に代入す ると
zi‑CF卜lyl+C ∑ ji=‑1lFi‑1‑j (Gxjlwj)+vi (65)
となる。式(64),(65)はともにⅩi,Wi,Viの線形関数であ冬。 これ らと式(63) を式(60)に代入す ると
J‑E(%xTQx+XTSE) (66) を得 る。 ここでⅩ‑(Ⅹ1,‑‑・,ⅩN)Tである。 また Ⅹに関係 しない項 は省略 して ある。 これ は先 の静的チーム決定問題 での 目的関数式(55)と基本的 に同 じであ る。
PN情報構造の場合,ある意思決定者 は先行す る意思決定者 を知 ってお り, またその決定規則 についての知識 もあ る. そ こで チ ーム に属 す るN人 の意思 決定者 をその先行関係 を考慮 して次 のよ うなnグループに分割す る。
Nl‑ti:jくiなるjが存在 しない) N2‑(i:jくi,j∈Nl)
N3‑●ti:j<i,j∈N2)
●●
Nn=(i:j<i,jENn̲i)
Nlに属す る意思決定者 は先行す る意思決定者が存在 しないので式(63)はui‑ HiEとなる。 これはuiが過去 の情報 Eにのみ従 っていることを示 して い る。
N2に属 す る意思決定者 は先行す る意思 決定 者 の決定 Ⅹjとその情 報 uj,j∈Nl がわか っているので,式(63)は
,i∈N2 (67)
76 商 学 討 究 第41巻 第4号 となる。 すべて のi∈N2,j∈Nlに対 して
^ui‑ui‑ ∑ ji=‑1lDijXj
とお くと,
(68)
Qi‑H iE (69)
を得 る。 したが って,情報構造が式(63)のような線形 のPN情報構造 であ り,
任意の決定関数 γ i,i‑1,‑‑,Nに関す る動的チームは,情報構造が式(70) で与え られる情報構造の静的チ丁ムと等価 になる。 このことか ら式(60)〜(63)
で与え られ るLQGタイプの動的チーム決定問題の最適 な意思決定関数 は静 的 チーム決定問題 の場合 と同様 に式(58)と同型 の線形関数 として与え られ る。
Ho,Chuは上記 のようにPN情報構造を持つ動的チーム決定問題を等価 な静 的 チーム決定問題 に置 き換えて線形 の意思決定関数 を導 いた。 そ こで はNiに 属す る意思決定者 は先行す る意思決定者の情報 を同 じように持 っている。 この よ うな情報構造 は一般 に古典的情報構造 と呼ばれ,そ うやない情報構造 は非古 典的情報構造 と呼ばれている。 この非古典的情報構造 を持っ動的チーム決定問 題では,意思決定関数 は先のような線形関数 にはな らない。Cole,Sage12) は このようなPN情報構造でない動的チーム決定問題 に対 して,.PN情報構造 を 持っ補助問題を作成 しその意思決定関数 を求 めることによって元の問題の意思 決定関数 を求めている。 非古典的情報構造 に関 して森,示村13)は情報交換価 値 と情報伝達価値 について考察 し,最適制御,最適 な情報伝達 と交換時点 の決 定 などを導 いている。
4. 生産計画問題への応用
ここで はシステムの状態観測や情報交換 に外乱が存在 しない確定的な問題を 対象 にす る。制約条件式g(Ⅹ)を システムの状態方程式 と して次 のよ うに書 き 改める。
y‑g(Ⅹ) (70)
ここでy‑(y1,‑‑,yN)で,Ⅹ‑(Ⅹ1,‑‑,ⅩN)Tである。 目的関数f(y,Ⅹ)は Ⅹ, yに関 して微分可能 な凹関数であるとす る。情報構造 は,