第6章 大型帆船の帆走性能
雨宮 伊作
*、 芳村 康男
** 目次 6.1 はじめに 6.2 帆の空力特性 6.3 帆走性能の推定 6.4 航海実績と実船性能 6.5 タッキング等の操縦制御 6.6 おわりに6.1 はじめに
独立行政法人航海訓練所の大型練習帆船日本丸及び海王丸は、1930 年に建造された初代日本 丸、初代海王丸の代替練習帆船として、それぞれ日本丸は1984 年、海王丸は 1989 年に住友重 機械工業浦賀艦船工場において建造された。初代の建造にあたっては、設計図や部品は英国で 作製されたものを輸入して、国内で組み立てた記録が残されているが、それから 50 年以上が 経過して日本丸を建造するにあたっては、現代造船技術の粋をつくして種々の水槽試験や風洞 試験による検討や推定を行ったうえで建造され、設計から、建造、就航までの全工程を我が国 の造船所で行った初めての練習帆船ということができる。日本丸が就航すると、その優秀な帆 走性能[1]が明らかになったが、5 年後の海王丸建造にあたっては、基本的な構造は日本丸のス タイルを踏襲しつつ、プロペラの帆走時抵抗を減ずるため、フェザリングプロペラが採用され るなどの、更なる改良が加えられた。 日本丸、海王丸の就航から25 年以上が経過したが、両船とも(以下大型帆船と表記する。) 外内航商船の航海士、船長を目指す若者を訓練するため、航海訓練実習を続けている。大型帆 船の帆走性能について、建造前後に相次いで実施された水槽・風洞試験等からの推定に始まり [2,3]、25 年間の実船運航実績解析にいたるまでを紹介する。6.2 帆の空力特性
1989 年から 1990 年にかけて、大型帆船の帆走性能を検証するため、装備している帆の空力 特性を確認する目的で、大阪大学工学部の実験風洞で各種の帆模型による風洞試験[4,5]を実施 した。使用した模型帆は大型帆船の1/75 模型にナイロン・スピンクロス 1.8oz/yd2 を使用して36 枚の帆を縫製し取り付けた Full Sails model、横帆 6 枚つづりのフォアマストを船体から 独立させた Fore Mast Sails、縦帆 3 枚つづりの 船尾ジガーマストを独立 さ せ た Jigger Mast Sails、横帆 1 枚の約 1/20 硬帆模型である Single Square Sail の 3 種類を 使用して、流れの可視化、 * (独)航海訓練所 ** 北海道大学 水産科学研究院 表6.1 使用模型・実験諸元 Sails Full
Model Fore Mast Jigger Mast SquareSingle
No. of Sails 36 6 3 1 Scale 1/75 1/75 1/40 1/20 Sail Area(m2) 0.491 (2,760) 0.106(597) 0.117(187) 0.163(74) Aspect Ratio - 2.22 4.10 0.29 Reynolds No. 1.10×106 2.03×105 2.30×105 5.20×105 「セーリングヨットと帆走性能」シンポジウム 2010 年 8 月
及び揚力抗力特性を確認した。表6.1 に各帆模型の縮尺や実験諸元等について示す。
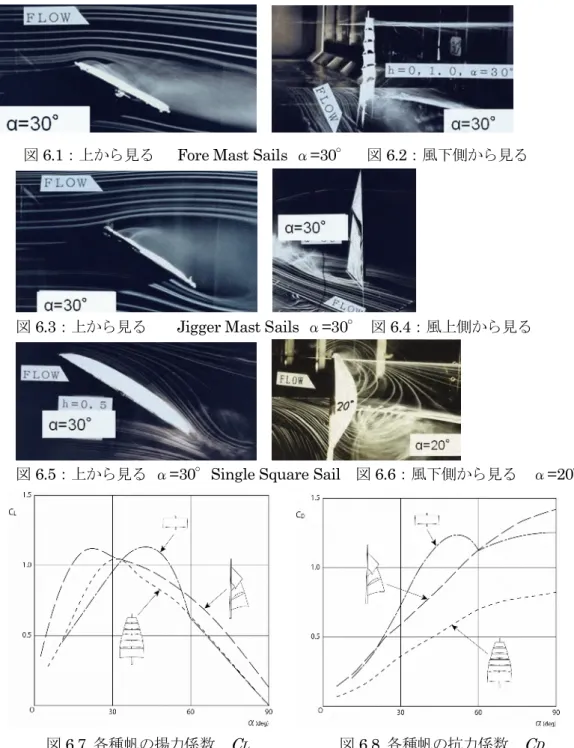
図6.1~図 6.6 に可視化写真を示す。図 6.1及び 6.2 の横帆 6 枚を綴った Fore Mast Sails で は、ちょうど風の流れが剥離を開始している様子が観察できる。この事は図6.7 に示す横帆マ ストの揚力係数が α=30°で極大となっていることからも自明である。これに対し、図 6.3 及び 6.4 の Jigger Mast Sails では、風はすでに剥離しており、揚力のピークは過ぎていることがわ かる。これはJigger Mast のアスペクト比が高いことに加え、リーディングエッジにマストが 存在することも影響していることが考えられる。また、帆の表面を硬化させた単帆である Single Square Sail は、横帆マストの上から 2 番目に当たる Upper Topgallant Sail を使用し ているが、図6.6 に顕著に現われているような翼端渦が帆の風上側から風下側に回り込むよう
図6.1:上から見る Fore Mast Sails α=30° 図 6.2:風下側から見る
図6.3:上から見る Jigger Mast Sails α=30° 図 6.4:風上側から見る
図6.5:上から見る α=30°Single Square Sail 図 6.6:風下側から見る α=20°
にして帆の上下端から発生している。この渦は 抗力を増加させると同時に帆面からの流れの剥 離を遅らせる効果も生んでいることが、図 6.5 から判断することができる。その結果、揚力が ピークを迎えるαは約45°まで遅れている。 このように揚力勾配はアスペクト比の高い Jigger Mast Sails が最も高いが、リーディング エッジにマストが存在するため抗力も高い傾向 を示しているのに対して、Fore Mast Sails は マスト全体のアスペクト比に見合った空力特性 を示し、さらにシャープなリーディングエッジ により、抗力係数が最小となる傾向を示してい る。また、Single Square Sail の抗力係数は誘 導渦の発生により、α=60°までは最も高い値 を示すが、誘導渦が消滅する 60°以降では Jigger Mast Sails が高くなっている。
図6.9 及び図 6.10 には揚力及び抗力係数を船 の前進または横方向に変換して推力係数、横力 係数として示した。船体の1/75 模型を使用した Full Sails では帆と船体横面積も加えて無次元 化しているために曲線の大きさが異なっている が、形状としてはFore Mast と Full Sails の傾 向がよく似ていることがわかる。このように、 横帆主体の大型帆船は、横帆を縦に6 枚連ねる ことにより、アスペクト比2程度の縦に長い長 方形の帆に近い空力特性を示し、ヨットと同様 にアビーム付近で性能を発揮する傾向があるこ とを実験結果は示している。
6.3 帆走性能の推定
図 6.11 の座標系を用いて運動方程式を以下の ように表す。[2]
K
GM
g m
sin
I
Y
x
N
r
I
Y
r
mu
v
m
X
r
mv
u
m
xx G zz G G G G
(6.1) ここにu
G,
v
G,
r
,
は船の重心における前進速 度成分、横方向速度成分、旋回角速度および横傾 斜角で、m,I ,
zzI
xxは船の質量と旋回軸及び横傾斜 図6.11 座標系 図6.9 推力係数 図6.10 横力係数軸の慣性モーメントである。またX, Y, N, K は水面下の船体に働く流体力と船体上部構造物の 風圧力、並びに帆の発生する力の合力を表す。帆走中の船の運動は上式の運動方程式を解くこ とにより求められるが、船が風に対し一定の角度を保ちながら定常速度で直進する場合の平衡 式は(1)式において
u
G
v
G
r
0
,
0
及び、r
0
として得られる。すなわち、
0
sin
g
0
0
0
m
GM
K
N
Y
X
(6.2) ここで流体力X, Y, N, K は以下のように分離して取り扱う。
A R H A R H A R H A R HK
K
K
K
N
N
N
N
Y
Y
Y
Y
X
X
X
X
(6.3) ここに添字H, R, Aは次のことを意味する。 H: 水面下の主船体に働く力 R: 水面下の舵に働く力 A: 帆及び船体上部構造物に働く風圧力 水面下の力は船の周りの相対流速と流向、横傾斜角、並びに舵角で変化する。帆の力は帆の角 度によって異なるが、帆の推力が最大となる角度は船の相対風向に応じて一つ決まるので、水 面上の力は相対風向・風速の関数として表現できる。これらの力の取扱いについては、以下に 要約する。 (1) 水面下の船体に働く力 水面下の流体力は船の操縦性における取扱いと同様、MMG の考え方に従って、(6.3)式のよ うに主船体と舵に分離して表現できる。これらの力のうち、XH,YH,NH,KHは斜航試験により、 またXR,YR,NR,KRは舵角試験で求めることができる。 a) 流体力XH,YH,NH,KH 船体前後方向の力X は傾斜角 β や横傾斜角 φ に応じて変化し、横方向の力H Y とモーメンH トN ,H KHは主に β の増加と共に大きくなる。これらの変化は概略次式で表せる。
3 2 2 3 2 2 3 2 2 3 2 2 3 2 2 3 2 4 2 2 0 22
/
2
/
2
/
'
2
/
K
K
K
K
K
K
U
Ld
K
K
N
N
N
N
N
N
dU
L
N
N
Y
Y
Y
Y
Y
Y
LdU
Y
Y
X
X
X
X
X
LdU
X
X
H H H H H H H H (6.4) ただし、
sin
1(
v
/
U
)
大型帆船の船体主要目を 表6.2 に、船をφ傾斜さ せ、船首からβの方向に 斜航させた時に主船体に 働く力を無次元化した流 体力微係数等を表6.3 に 掲げる。 表 6.3 流体力微係数 b)流体力XR,YR,NR,KR 舵直圧力FNと船体の流体力XR,YR,NR,KRの関係は一般に次式で表わすことができる。
cos
)
(
'
cos
)
(
'
cos
)
1
(
'
sin
)
1
(
'
N H H R R N H H R R N H R N R RF
z
a
z
K
F
x
a
x
N
F
a
Y
F
t
X
(6.5) ただし、x ,
Rz
R は舵の座標を表わし、L, d で無次元化した本船の値はxR xR/L0.5 518 . 0 / z d zR R である。表6.2 及び表 6.3 に1
t
R等の値を表示する。 一方、舵直圧力係数F
Nは直進時は舵角δにほぼ比例し、次式で表現することができる。 R R R N NU
f
Ld
A
LdU
F
F
sin
)
/
(
2
/
2 2
(6.6) ただし、URとαRは舵の有効流速と流向を表し、)
25
.
2
/(
13
.
6
/
f
U
U
U
R R また、AR:舵面積 :舵のアスペクト比 である。舵の有効流速は舵位置の有効伴流係数で定義し、次式で表す。 R Rw
U
1
(6.7) 表6.2 船体主要目 Hull Lpp(m) B (m) d (m) Cb GM(m) 86.0 13.8 6.2 0.61 1.18Rudder AR/Ld Λ x’R z’R Sail As/Ld 1/39.5 2.80 -0.5 0.518 4.11
X
-0.0445Y
0.4252N
0.1152K
-0.1797 1-tR 0.881 X
-0.0197Y
0.0165N
-0.0004K
-0.0074 1-wR 0.539 X
0.0041Y
2.4403N
-0.0347K
-0.5147 γR 0.057 X
0.3312Y
0.1328N
-0.3158K
-0.0885 αH 1.849 Y
-0.4778N
0.0213K
0.5588 x’H -0.473 Y
-0.0666N
-0.0293K
-0.1309 z’H 1.045本船ではこの値は0.5 と通常船舶に較べて小さく、舵直圧力のみならず舵抵抗も小さくなっ ている。この原因は本船の舵が船体後部に近接した不平衡舵を採用しているためであり、小さ い舵抵抗で強い舵効きが得られることになる。 次に船が斜航した時の舵の力について述べる。この力は前述の斜航試験で舵角を取った時の 舵直圧力を解析することにより求めることができる。船が斜航すると、舵の流入角は斜航角に 応じて減少し、この変化を次式で表現できる。
R
r
R(
U
/
U
R)
(6.8) ここに、γR は船体の整流係数であり、この値を表2に示す。以上の(6.6)式~(6.8)式を(6.5) 式に代入すると、操舵による力X
R,
Y
R,
N
R,
K
Rの数学モデルが得られる。ただし、簡略にする ためsin
sin
R
2,
cos
sin
R
R と近似する。
))
1
/(
(
))
1
/(
(
)
'
(
))
1
/(
(
))
1
/(
(
)
'
(
))
1
/(
(
))
1
/(
(
)
1
(
)
1
(
2 2 R R R R H H R R R R R R H H R R R R R R H R R Rw
r
K
w
r
C
z
a
z
K
w
r
N
w
r
C
x
a
x
N
w
r
Y
w
r
C
a
Y
X
C
t
X
(6.9) ここに、 2)
1
))(
25
.
2
/(
13
.
6
)(
/
(
A
RLd
w
RC
(2)帆及び船体上部構造物に働く力 帆及び船体上部構造物の空力係数は相対風向γαに依存し、これを次式で表現する。 図6.12 風洞試験における展帆状態
2 * 2 * 2 * 2 *2
/
)
(
2
/
)
(
2
/
)
(
2
/
)
(
a S a A a A a S a A a A a S a A a A a S a A a AdU
A
K
K
LU
A
N
N
U
A
Y
Y
U
A
X
X
(6.10) ただし、A
S:帆面積(有効帆)U
a:視風速
a:視風向 a
:空気の密度 図 6.12 の各丸数字における展帆状態に ついて、風洞試験を実施し、結果として得 た帆の空力係数を図6.13 に示す。 (3)帆走時の平衡方程式 前述の(6.3)式~ (6.4)式及び(6.9) 式~ (6.10) 式を (2) 式に代入すると、以下の
,
,
,
U
に関する平衡方程式が得られる。 すなわち、
0
/
sin
)
/
(
)
/
)(
/
)(
/
(
)
1
/(
0
)
/
)(
/
)(
/
(
)
1
/(
0
)
/
)(
/
)(
/
(
)
1
/(
0
)
/
)(
/
)(
/
(
'
2 2 * 3 2 2 3 2 * 3 2 2 3 2 * 3 2 2 3 * 2 4 2 2 0U
GM
a
B
Cb
U
Ua
Ld
As
K
K
K
K
K
K
K
w
r
K
K
U
Ua
Ld
As
N
N
N
N
N
N
N
w
r
N
N
U
Ua
Ld
As
Y
Y
Y
Y
Y
Y
Y
w
r
Y
Y
U
Ua
Ld
As
X
X
X
X
X
X
X
a A R R a A R R a A R R a A
g
(6.11) ただし、 g :重力加速度 ρ :水の密度(実船では海水の密度) 図6.13 帆と船体上部構造物の空力特性この平衡方程式をある仮定した
U
,
,
,
の周りで線形展開し、多元Newton-Raphson 法によって解いた結果が図 6.14 に示す各種 帆走状態の定常帆走性能である。真風速は 10m/sec としており、上段から帆走速力率を 示すポーラーカーブ、横流れ角(lee way)、傾 斜角、そして平均当て舵であり、これらを真 風向に船の横流れを加算した角度、すなわち 風上から計った船の進行方向に対して表示す る。 フルセールの状態①の帆走速力率は風上から 90°~120°の方向への帆走で最大となり、 その値は約0.6 と推定される。風上への切り 上がりは55°付近で最大となり、その時の速 力率は 0.35~0.4 程度と推定される。120° より風下側への帆走では、追手になるに従い 速力率が低下し、真追手における速力率は 0.3 となる。その他の展帆状態においても、 真追手が最も性能の低い風向となるが、これ は前のマストに風が入らなくなることが原因 と考えられる。6.4 航海実績と実船性能
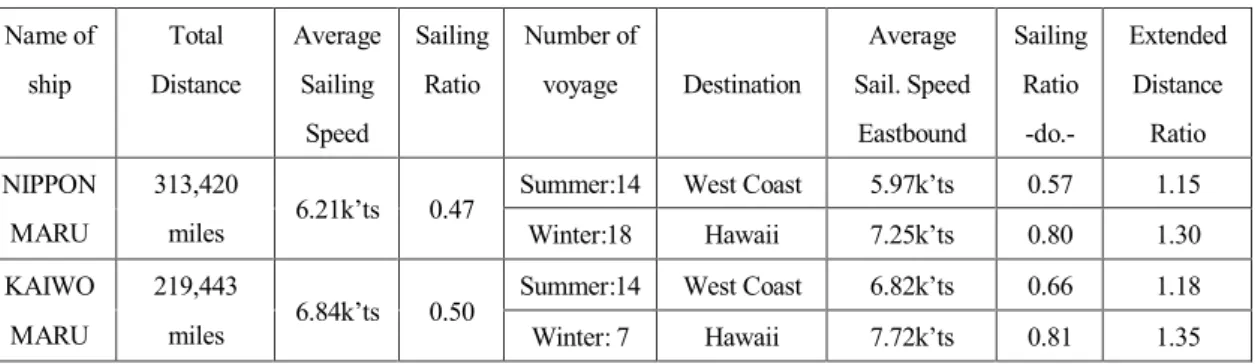
6.4.1 遠洋航海実績 日本丸・海王丸が太平洋横断規模の遠洋航海を実施した回数等を表6.4 に示す。両船あわせ て 53 回の遠洋航海を主として夏は北米西岸向け、冬はハワイ向けで行い、1航海平均で約 1 万海里の距離を航走している。訓練計画上往航は可能な限り帆走で目的地を目指し、復航は機 走による訓練を行っていることから、全航程の約50%に相当する距離を帆走している。 海王丸の平均帆走速力が日本丸より0.6knots 速いのは,フェザリングプロペラを採用するこ とにより、プロペラの抵抗を減じられたためと考えられる。そこで、帆走を主体とした往航に ついて、平均帆走速力・帆走率及び大圏距離と実際に航走した距離を比較する航海距離延長率 の3 要素を用いて、目的地毎の比較を行ったものを合わせて表中に示す。 練習帆船の遠洋航海の場合、目的港の入港日時をあらかじめ設定しているため、途中で帆走 を中止して機走に入ることにより入港に間に合わせる場合がある。北米西岸向けが全航程を通 じて偏西風帯を航行するにもかかわらず、ハワイ向けより帆走率が低いのは、夏季で風が弱い ことなどが理由と考えられる。 また、日本丸の固定ピッチプロペラは遊転させることによりその抵抗を減ずることができる が、遊転開始に約 8knots の速力を要するため、風の弱い夏季には海王丸との平均速力の差が 大きくなっている。 図6.14 各種展帆状態別帆走性能表6.4 大型帆船の太平洋横断規模の遠洋航海実績 6.4.2 実船の帆走性能 6.3 節において推測した直進時の定常帆走 性能について、海王丸船上において2008 年 冬及び夏の遠洋航海中に風速、船速等を計測 した 10 分間平均値を用いて、推測との比較 を行った。 ただし、船上で観測する視風速については、 風が船体を乗り越えようとしてジガーマスト 上の風車型風速計に吹きあげ角を持って吹き 込むことが風洞試験で確認されたため、視風 速の修正を行った。その上で、図6.15 に示す ような船上で観測した視風速UA、船速u等 から次式を用いて、真風速等を計算し、船速 と真風速の比である速力率Dを求めた。
(%)
100
/
sin(
/
sin
)
cos(
2
cos
/
1 2 2 T A T A T T A A TU
u
D
U
U
u
U
u
U
U
U
u
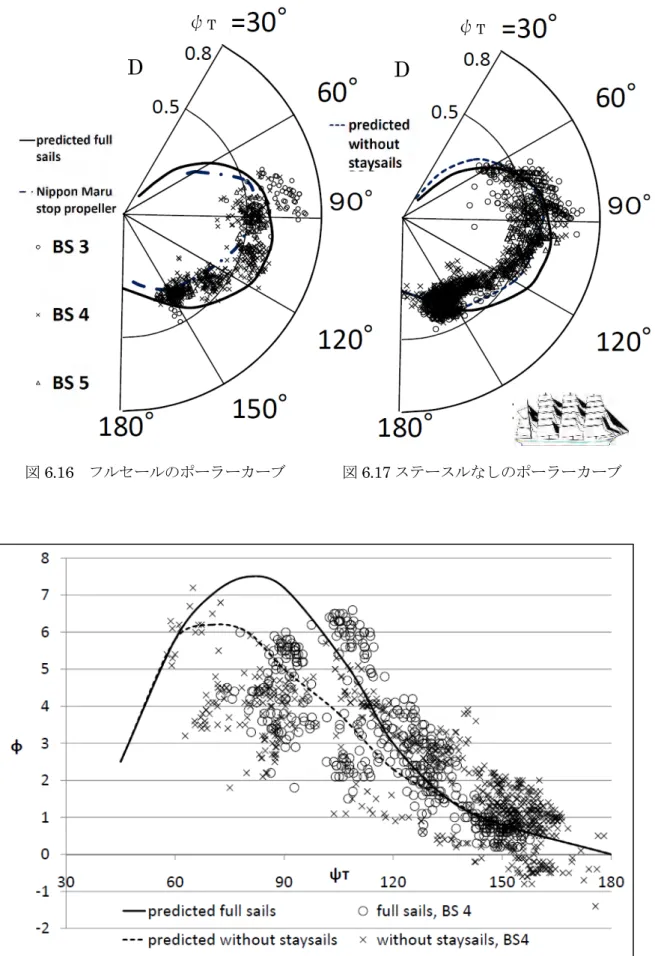
(6.12) 図 6.15 風のベクトル三角形 図6.16、6.17 には、速力率Dを船首尾線に対する真風向ψTに関する極座標に、いわゆるポ ーラーカーブとして示した。それぞれ、図6.16 には 36 枚すべての帆を展じた、フルセールの 場合、図6.17 にはステースルを減じた場合を点で示している。図中の直線は推定計算値である。 また図6.18 には傾斜角の推定と実測を比較している。 Name of ship Total Distance Average Sailing Speed Sailing Ratio Number of voyage Destination Average Sail. Speed Eastbound Sailing Ratio -do.-Extended Distance Ratio NIPPON MARU 313,420 miles 6.21k’ts 0.47Summer:14 West Coast 5.97k’ts 0.57 1.15 Winter:18 Hawaii 7.25k’ts 0.80 1.30 KAIWO
MARU
219,443
miles 6.84k’ts 0.50
Summer:14 West Coast 6.82k’ts 0.66 1.18 Winter: 7 Hawaii 7.72k’ts 0.81 1.35
図6.18 傾斜角の推定と実測の比較
D
D
ψ
Tψ
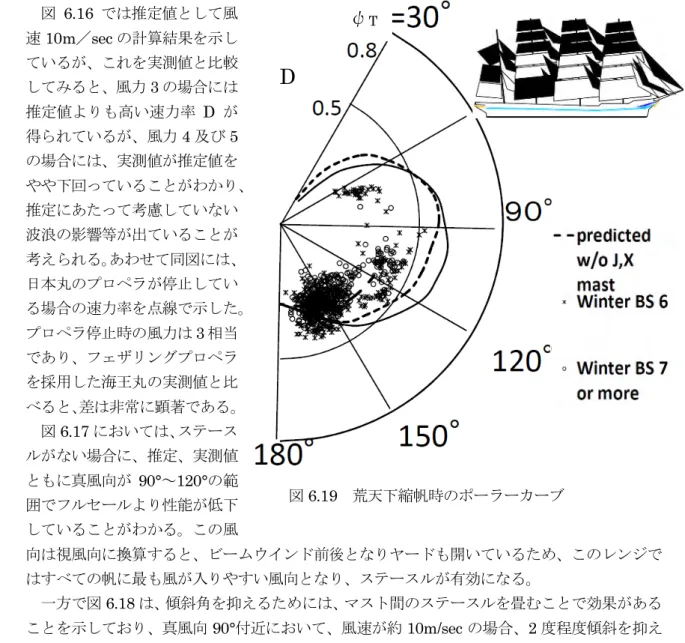
T図 6.16 では推定値として風 速10m/sec の計算結果を示し ているが、これを実測値と比較 してみると、風力3 の場合には 推定値よりも高い速力率 D が 得られているが、風力4 及び 5 の場合には、実測値が推定値を やや下回っていることがわかり、 推定にあたって考慮していない 波浪の影響等が出ていることが 考えられる。あわせて同図には、 日本丸のプロペラが停止してい る場合の速力率を点線で示した。 プロペラ停止時の風力は3 相当 であり、フェザリングプロペラ を採用した海王丸の実測値と比 べると、差は非常に顕著である。 図6.17 においては、ステース ルがない場合に、推定、実測値 ともに真風向が 90°~120°の範 囲でフルセールより性能が低下 していることがわかる。この風 向は視風向に換算すると、ビームウインド前後となりヤードも開いているため、このレンジで はすべての帆に最も風が入りやすい風向となり、ステースルが有効になる。 一方で図6.18 は、傾斜角を抑えるためには、マスト間のステースルを畳むことで効果がある ことを示しており、真風向90°付近において、風速が約 10m/sec の場合、2 度程度傾斜を抑え る効果がある。このように、船体傾斜角φは、帆の枚数や視風向ψA、視風速UA、排水量、GM 及び傾斜モーメントKにかかわる流体力微係数等から計算可能[7]なので、大型帆船上では船 体傾斜角を種々推定計算できるプログラムを備えて、定常傾斜角を10 度以内に制御している。 また、図6.19 には、冬季遠洋航海において、風力 6 を超える強風下[6]での速力率を示して いる。図中には推定計算のケース③に相当する、ミズン及びジガーマストの帆を減じた場合の 推定値を点線で示す。実船の実測値は図中に示すような展帆状態が最も多かったが、風力7 を 超えると展じている帆の枚数は 12 枚前後となって、面積もほぼ等しくなりψTが100°より後 方の推定値と実測値はほぼ一致している。 次に風上航性能を比較すると、ステースルなしの場合には真風向に対し、60°弱まで切りあ がった実績が図6.17 に示されている。一方風速が上がると、図 6.19 に示すように風上航実績 が減り、風力7 以上になると 80°~90°程度までしか実績がない。これは視風向ψAが前になる と、視風速UAが高くなるため、傾斜 φ が増大してしまうことが主たる原因である。傾斜を抑 えるためには上方から縮帆していくことになるが、結果として推力を失うことになり、荒天下 では風上航性能は期待できないことになる。
ψ
T 図6.19 荒天下縮帆時のポーラーカーブD
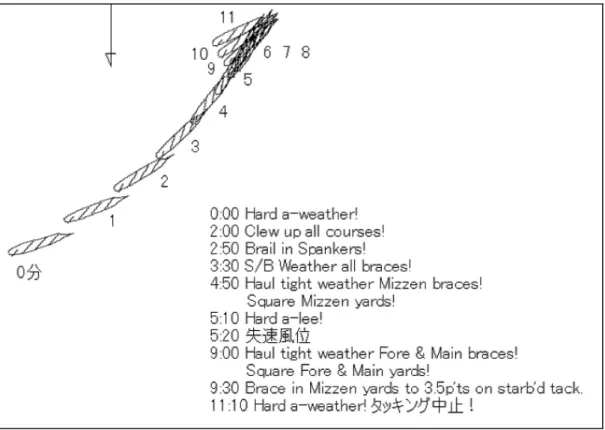
6.5 タッキング等の操縦制御
帆走による回頭操船は、風上に回頭させるタッキングと風下に回頭させるウェアリングの 2 種類に大別される。通常は当直者のみで実施できるウェアリングを用いることが多いが、多人 数を要するタッキングには成功すれば短時間で小さく回頭できるメリットがある。図6.20 には 伝統的な手法によるタッキング軌跡を、図6.21 にはその際の舵角等を時系列で示す[8]。図6.20 タッキング軌跡(T-1:伝統的手法)
図6.21 船首方位・回頭角速度・舵角等の時系列(T-1:伝統的手法) ヨットのタッキングと異なり、大型帆船のタッキングはミッシングステイとなって失敗する ことが多い。図6.20 の GPS 軌跡から明らかなように、操舵後減速しながら風上に回頭し、風 央を過ぎてからは後進行き脚になって回頭を続け、新たなタックで帆に風が入ってから前進行 き脚を得ている。ミッシングステイとは、図6.21 に示すように、操舵したものの、風央を越え て回頭することができない場合を言う。タッキングの成否は第一に新タックで前進推力を得ら れるまでの約 70°をいかに回頭するかに注意を払い、次いで回頭にあわせて、素早くヤードを 回転し、新しいタックで帆に風を入れ遅れることがないよう注意することが肝要である。
図6.22 ミッシングステイの軌跡 また図6.23 にはウェアリン グの例を示す。この軌跡は、 各マストの帆を一斉に旋回す る方法をとり、可能な限り旋 回径を小さくするべく努力し たものであるが、ウェアリン グの旋回径は400m 以上あり、 その分風下側に落とされてい ることがわかる。このように 大型帆船では、ヨットとは逆 で、タッキングは失敗するリ スクがあるが、成功した場合 には風下への圧流を抑えるこ とができ、ウェアリングは失 敗することはないが、大きく 風下に圧流される。これらを 踏まえて、旋回径を極力小さ くするために、舵により風上 に回頭を開始した後は、すべてのマストのヤードを同時に旋回させ、素早く回頭することを試 み、図6.24 のタッキング軌跡を示し、その時系列を図 6.25 に示す。この場合には T-1 の回頭 開始時の船速が約4 ノットであったの対し T-2 の場合は約 7 ノットであったため、操舵後 2 分 図6.23 ウェアリングの軌跡
半で風央を越え、7 分後には新しいタックで風を帆に入れて前進を開始している。ただし、T-1 では後進行き脚時に逆に舵を取って、回頭を助けたのに対し、T-2 では後進時の舵効に期待す る間もなく新しいタックで風を受けている針路まで回頭していることに注意する必要がある。 すなわち初速が十分にある時にはこの方法は成功しやすいが、初速が十分でないときには、後 進行き脚とその際の舵効を利用しないと回頭しきれない場合が生じてしまう。また、初速が4 ノットより小さい場合にはミッシングステイに陥る可能性が高いことがわかっている。 図6.24 タッキング軌跡(T-2:新たな試み)
図6.25 船首方位・回頭角速度・舵角等の時系列(T-2:新たな試み) Hard a-weather! 1 分後 Clew up courses 7 Set all
3Let go & haul
10 12
14
5