ドライバーによる事故要因の定量的
メカニズムの解明
― 平成 25 年度(本報告) タカタ財団助成研究論文 ―
ISSN 2185-
8950
研究実施メンバー
研究代表者
いわき明星大学 科学技術学部
報告書概要
本研究は自動車の交通事故を無くするため事故の原因とされる運転者のうっかり,ぼんや りあるいは判断ミスを,ヒヤリあるいはハットを通して人間の認知・判断・行動の情報処理 から分析し,これらと視覚と視認との関係を明確にすることを目的とする.平成 24 年度タ カタ財団助成研究結果報告では静止及び運転中の距離感,認知度を評価するため評価道路の 制作を ISO や NHTSA の車載機器類の評価方法を参考に新たに行った.またその妥当性を検討 するため,生体特性の皮膚電位や脳波によって行った.この結果,視覚や視認を明確にする ため動的な眼球運動解析の必要性から,視線計測装置を使用して,視覚と視認を明確にする ことの重要性を主張した.またこれまで交通事故時のうっかり,ぼんやり等はヒューマンエ ラーとして一括処理されまたこれまでも多くの報告がなされている.しかし運転時の人間の 行動は千差万別で,道路環境も複雑等の理由で事故原因の解明が必ずしも明確にされておら ず,これらの原因を定量的に把握できなかった.また,自動車運転中のヒヤリ・ハットのデ ータが蓄積されていて,報告があるものの,ドライバーディストラクションと関連付けて報 告されたものは少ないようである. そこで,本研究ではドライバーディストラクションとヒヤリ・ハットの相関を運転状況に おける視覚による視野範囲,視認および不意の外乱に対する対処方法等の基礎的データをド ライビングシュミュレータによって行い,根本的な研究から事故要因分析を定量的に行い, 交通事故ゼロを目指す.目 次
ドライバーによる事故要因の定量的メカニズムの解明 第 1 章 諸言 第 2 章 研究背景 2.1 平成 24 年度タカタ財団助成研究成果報告結果のまとめ 2.2 平成 25 年度研究目的 2.3 視覚に関する基礎的事項 2.4 既に構築済み提案評価コース概要 第 3 章 実験方法 3.1 実験装置 3.2 実験方法 第 4 章 実験結果 4.1 昨年度の実験結果の概要 4.2 視線計測装置による実験結果 4.3 皮膚電位による実験結果 第 5 章 考察 第 6 章 まとめと今後の課題 参考文献 謝辞第
1 章 緒言
自動車の交通事故の要因には人間系によるものと機械系によるものの2 つがあるが,機械 系が原因となる交通事故は自動車技術の進歩により近年ではごく少数である.機械系の原因 となる交通事故件数が減少する中,人間系の原因となる交通事故件数があまり減少しておら ず,交通事故発生原因の大多数を人間系の原因が占めている.特に安全運転義務違反がその 原因として挙げられているが,この内,安全不確認や脇見運転,動静不注視といった原因が 多く報告されている.これらの見落としが原因となる事故では焦りや思い込みといった精神 的な要因が考えられている. 運転技術は乗降を繰り返すことで技術が向上し,自動運転に見られるように人間の代替と なる車両側からの予防安全はできるようになりつつある.一方車内側,すなわち運転者側か らの予防運転,具体的には不注視や不確認による見落としなどを未然に予測するのは現在の ところ困難である.自動車の安全技術の向上により交通事故死者数は減少しているが,運転 者の運転状況を把握することでさらに安全性を向上させ,あらゆる事故の予防を目指すこと が重要である. これまでも本研究室ではドライビングシミュレータ(以降,DS)を用いて乗員の体圧分布変 動や表情変化,車両挙動などを分析することで精神的負荷による疲労や眠気などの体調変化 を読み取り,覚醒を促す運転支援システムに関する様々な研究を行ってきた. 本研究では,人間系の事故の原因として運転者の注意散漫(Driver Distraction 以降,DD)に 着目し,特に視覚情報である視覚と認知について眼球をアクティブに捉える基礎的研究を行 うことにより人間系による事故原因メカニズムを追求し,事故を限りなくゼロに近づけるこ とを目標にする.第
2 章 研究背景
2.1 平成 24 年度タカタ財団助成研究成果(13) 平成24 年度タカタ財団助成研究成果から,座圧分布による疲労計測,絶対距離感,運転 中の見落とし,見落としと視線固定(停留時間),皮膚電位によるヒヤリ・ハットの計測か ら次のことが分った. (1) 疲れを計測していた座圧試験では短距離・短時間の DS 運転では結果が得にくい. (2) 皮膚電位の結果から,精神的負荷がかかる状況では生体信号に明確な変化が現れる ことが確認できた.なお事前に事象を意識することで今回定義した精神的負荷には 該当しない. (3) 絶対閉空間では,正解距離よりも短い距離を申告する傾向がる.開空間では個人差 が出やすく回答では距離の範囲がばらつく傾向がある.距離感は人間が過去に見た 記憶や,過去の経験,周辺にある物などを一種の基準として用い,人は絶対距離感 を遠方に対してあまり持ち合わせていないと考えられる.(4) PDT(Peripheral Detection Task:周辺検出課題) 反応時,0.2 秒程度の視線固定が見ら れる.ターゲット見落とし時は視線固定が見られなかった.運転中は運転負荷が与 えられることでPDT 反応時間が遅くなった. (5) 60km/h での走行時において 6 秒以上(約 100m 移動)の見落としが発生する. (6) ターゲット表示時間が 1 秒未満になると見落とし率が 40%と大幅に上がる. (7) 皮膚電位及び脳波と入眠の関係が少し明らかになった. この結果から平成25 年度の研究目的が明らかになった. 次節でその研究目的を述べる. 2.2 平成 25 年度研究目的 前節の研究結果から,平成25 年度の研究目的は次のようにする. (1) 運転中見落としをする原因を追究する.さらにそのメカニズムを明らかにする. (2) 視線と視認には時間の関係があり,その時間を停留時間と定義して,その閾値を求 める. (3) 道路環境条件を変え,ヒヤリ・ハット状況を皮膚電位によって求める. (4) さらにシートベルトに埋め込んだセンサーによって乗員挙動を把握するための基礎 試験を続行する. 2.3 視覚に関する基礎的事項(1) 平成24 年度の報告では視覚に関する基本事項を記述したが,ここでは簡単な紹介に留め る. (1)視覚特性 人間は生活に必要な情報の約90%を視覚から得ているという報告がある.人間の目には 中心視野と周辺視野があり,一般的に前者は視線を中心とした約 20°の範囲,後者は中心 視から外れた上下約130°,左右 180°の範囲として分けられる. (2)奥行きの知覚 両眼による奥行きの知覚の場合,経験的要因は必要でなくなる.左右の単眼で見るそれ ぞれの映像は,眼の位置により角度の違いが必ず生まれる.そのため,見ているものが立 体であれば左右で見える映像も違ってくる.両眼でみた際に生じる左右での映像の差を視 差といい,この両眼での視差によって人間は物体を立体視することが出来る.今回特に注 目する点はない. (3)距離感 距離感とは対象までの距離を正確に把握する感覚のことを言うが,これは単純な遠近感 を把握する奥行きの知覚とは少し違い,対象までの距離を理解する感覚である. また,距離感について調査していても絶対距離感に関する項目はほとんど見当たらない. 絶対音感などは一般的にも認知されているが,距離に対して絶対的なスケールを持ち,判 断することは可能なのか.絶対距離感による距離の知覚についても,この研究を通して解 明していければと考える. (4)視認性
一般的に視認性とは視覚的な物や字などを明確に認識できるかを表すもので,色や大き さ,コントラスト,解像度等の要因に影響される.この項目も今回特に注目はしない. 2.4 既に構築済み提案評価コース概要 今回視覚に関することを中心に研究を進めるので,評価することが重要になる.そこで DS 上で視覚視認を評価する道路をこれまで提案されている ISO 及び NHTSA の道路を確認 し参考にする. (1)ISO 提案道路(2) ISO(国際標準化機構)より提案されている 26022 は輸送情報と制御システムの人間工学的 側面から車載2 次タスクの運転者に与える心的負荷を評価することを目的としている.車線 変更テストによって車載機器のヒューマンインターフェス(HMI)が運転行動に及ぼす変化 を定量的に評価するものである.このISO で規定されている車線変更テスト(LCT)は実験室 内で車載機器の操作に起因する2 次タスクを含めた二重課題法である.これは自動車メーカ ーや車載機器メーカー,及び他の機関が単独で評価できるように工夫されている.またコー ス条件以外にも標識の形状や表示タイミングなども詳細に規定されており,平均偏差を用い て2 次タスクによる運転者の挙動評価を行う. 主な規定をまとめて下記に示す. ・スタート標識は開始地点から150m 地点に設置. ・車線変更標識はコース両端に18 組設置. ・標識間距離は平均150m としてランダムに設置. ・車線変更標識の組み合わせは6 パターンを均等に配置. ・標識寸法は幅2m,高さ 1m,地上から下枠まで 1m. (2)NHTSA 提案道路(3) NHTSA (米国運輸省高速道路交通安全局)において推奨されている評価コースは運転中の 総合車載電子装置の使用による運転者の注意散漫が原因で発生した自動車事故件数とその 死傷者数を減少させることを目的として作成されている.このガイドラインは,車載装置の 使用の際の運転者の注意散漫を防止するため提案されたものであり,車載装置メーカーが行 うことが出来るように作成されたものでる.様々な条件での注意散漫評価オプションを持ち, 用途や環境に応じて選択することが可能である.試験内容は先行車の追従を基本とし,その 条件下で2 次タスクの操作を行わせ車載機器の評価を行う.
第 3 章 実験方法
前年度,平成24 年度の成果報告で,ドライビングの性能評価後,ISO や NHTSA より提案 されているコースを評価し,それを参考に自作の評価コースを作成したことについて述べた. さらに実験を行い作成コースの評価を行ってその有用性を確認した.今年度は同じDS 及び 道路環境で視線計測装置を使用し,眼球の動き及び視線と認知に関する実験を実施する. 3.1 実験装置 3.1.1 HONDA ドライビング・シミュレータ(4),(5) 使用するドライビング・シミュレータ(以後,DS)は本田製でさまざまな交通状況を自由に 作り出すことが出来,ドライバーが運転する車の車種や運動性能まで自由に設定が出来る. また,6 軸の電動サスペンションにより実車の運動を再現でき,モーション機構の動きその ものもユーザーがカスタマイズ出来るように設計されている. 138°の広視野スクリーンを 持ち,車両の動作を再現することが出来る.動作にはHONDA ドライビング・シミュレータ 専用のソフトを使用し,コース作成に使用したフォーラムエイト㈱製 UC-Win/Road と連携 できるように設定している.DS を図 3.1 に,主な仕様を表 3.1 に示す. 図3.1 HONDA 製 ドライビング・シミュレータ表3.1 主な仕様 Hardware
View video
Front ・Wide field of view (138 °) screen projection system ・Total number of pixels 780,000 DLP projector (XGA) Rear ・Three separate liquid crystal display display mirror
・Pixel 640 × 480 (VGA) CG ・30-60 frames / s drawing speed Sound Hardware ・Stereophony + Experience vibration
Software ・Direct Sound Compliant Experience
mechanism Motion Base
Mechanism ・6-DOF motion with six cylinders Control ・Ball screw servo motor 200V Boarding area Operation
system
Display ・Diverted the vehicle instrument panel Operating
portion
・Reaction controlled steering equipment
・Axel & brake simulation mechanism
3.1.2 UC-win/Road 道路作成には新たに導入したプログラムソフトUC-win/Road Ver.4 を使用する.DS に従来 搭載されていたソフトウェアより簡単な手順と操作で大規模な仮想現実(以後VR)を短時 間に作成できる.また,走行シミュレーションに加え,日照,交通流,ドライブシミュレー ションなどの高度なリアルタイムシミュレーションに対応している. 3.1.3 皮膚電位測定装置(6),(7) 前 年度 からの 継続 で測定 には 直接皮 膚と 接触す る電 極から 構成 される セン シン グ (Ag-AgCl,ディスポ電極 Bs ビトロード),増幅器及びコンピュータから成る装置を使用す る.モニタリングにはDMM アプリケーションを使用する.基本的なセンサーの貼付位置は 手のひらと前腕の2 点だが,ここでは前腕部の表裏に電極を貼付して測定する. 3.1.4 視線計測装置(8) 今年度新たに計画した視線計測装置について概略説明する.視線計測装置はモバイル型ア イマークレコーダ EMR-9 (ナック製)を用いた.図 3.2 に構成図を示す.アイカメラを 装着するユニットコンピュータ及び解析ソフトから構成されている.主な特徴は下記のとお りである. ・無線LANを使用して離れた場所にいる被験者とPC間でモニタリグ,リモコン,音声通 信が可能. ・SD カードに記録された映像および計測データは,解析システム(EMR-dFactory Ver2.0 以 降) にて EMR-8B と同様の解析が可能. ・カメラを取り付けるタイプは小型軽量なる帽子型とゴーグルタイプがあるが今回帽子型 を使用する. ・操作は簡単で,SD 記録(MPEG4,AAC,データ),最高 240Hz サンプリング,リアル
タイム軌跡表示,リアルタイムイベント出力ができる. ・イーサネット(有線・無線)システムである. ・ソフトは制御ソフト EMR-dStation,解析ソフトは EMR-dFactory,dTarget,dStream ヘッドユニットカメラ据え付けタイプには2通りあるが,今回帽子型ヘッドユニットを使 用した.構成図の概略図を図3.2 に示す. 図3.2 視線計測装置の構成図 帽子型のヘッドユニットの装着状況を図3.3 に示す. 図3.3 帽子型ヘッドユニット また帽子型のヘッドユニットは次のような特徴を有している. ・ヘッドユニットは帽子タイプとなっており,カメラの両眼の重さは150g,グラコントロ ーラは本体質量590g である. ・本体内のSDカード(当社指定)に約1時間分のアイマーク映像,音声,計測データを保 存可能である.
・標準システムは,片眼/両眼モデルともに60Hzのサンプリングが可能.さらに最高240Hz のサンプリングが可能なモデルを用意している. ・視野映像上にはアイマークだけでなく,軌跡,停留点をリアルタイムでビデオ出力可能 である. ・アイマーク停留時間,瞳孔径,1秒間の瞬目回数等あらかじめ設定された条件発 生時にコントローラ本体からTTL信号を1ch出力可能. ・2 点キャリブレーションの実装,アイマークオフセット機能の実装により短時間でセッ ティングが可能である. 3.2 実験方法 3.2.1 前年度の性能評価(9)~(11),(13) DS,ISO及びNHTSA提案道路のそれぞれの評価は既に終了している.作成したISOの提案コー スの一例を図3.4に,NHTSAの提案コースを図3.5に示す.NHTSA提案コースの詳細については 2章の提案評価コース内に示している. 図3.4 作成した ISO 提案評価コース
図3.5 作成したNHTSA提案評価コース 3.2.2 DSにおける諸特性評価に供する道路作成及び運転者の精神的負荷評価((13) (1)実験コース作成 DS を使用した研究において,疲労や眠気の評価,DS の評価で様々なシミュレーションコ ースが使用されている.しかし,コースの形状,走行距離,シナリオタイミングなどを詳細 に明記している論文は見受けられない.そこでISO,NHTSA により提案されている評価コ ースを参考として精神的負荷評価実験コースの構築を試みる. 提案評価コースの共通した特徴として全長が5km 未満,直線コース,1 次タスクとして車 両操舵事象,2 次タスクとして周辺機器操作等の特徴が挙げられるが,本実験では外的な影 響を抑える目的から2 次タスクに関する項目を削除し,他の共通条件を主として独自にコー ス作成を行った. 全長 2km の直線コースで先行者追従を基本とし,緊急回避事象として先行車の急停止, 左右からの飛び出しイベントを設置することにより精神的負荷を与えるものとする.また, 同一コースの繰り返しによる慣れを考慮し,複数のシナリオを作成することによって事象に ランダム性を持たせた.さらに,事象への対応によってその後のシナリオが変化するように 工夫を施した. 作成したコースを図3.6 に示す.実験の様子を図 3.7 に示す.
図3.6 追従車試験コース
図3.7 実験の様子, 先行車(A)
図3.7 実験の様子,赤いマーカー表示(B)
先行車 帽子型ヘッドユニット
主な走行条件は下記の通りである. ・片側1車線の直線道路 ・開空間,閉空間 ・停止時,走行時1(被験者操作なし),走行時 2(被験者操作あり) ・走行時速度は60km/h(定速) ・表示位置は中央と右上,左上,右下,左下の5 点 ・表示数は10 点 ・ターゲット表示時間は6 秒 (2)飛び出しコースの概要 コースは,直線2 車線であり,道路の両脇は,街中をイメージしてビルが立ち並ぶ閉空間で ある. 直線道路に一定間隔で,信号の無い交差点が4ヶ所ある.走行開始時は,運転者の操作する 車両は右側の車線にいる.左前には先行する車がおり,左側の車線の前方を走行する.図 3.8 にコースの図面を示す. 走行条件は下記の通りである. ①走行開始.運転者の車輌は60km/h 未満に制限されている. ②最初の交差点で,右側から車両が飛出してくる(A地点). ③2 つ目(C1 地点),3 つ目(C2 地点)の交差点は何も無く過ぎる. ④前方で左側車線を先行していた車が停止しているので,それを過ぎたところで左側車 線へ車線変更する. ⑤車線変更直後の交差点で,左側から車両が飛出してくる(B地点). ⑥走行終了. 図 3.8 コースの平面図におけるイベント状況
なお被験者へ依頼した運転条件は下記の通りである. ・運転手には,車両が飛出してくることは知らせていない. (先行車という他の車があることで,飛出し実験であることを隠せる?) ・車両が飛出して来ることを知らない状態で,右側から飛出して来る. ・最初の飛出しにより,実験の本当の趣旨(飛出し実験であること)を理解することで,飛 出して来る可能性があると思わせた状態で,何も起きない交差点を2 か所通過する. ・A地点からB地点までの間は,交差点が2 か所あること以外は,単調な操作となる. ・停車している先行車を通過して車線変更することで,それまでの飛出しへの注意を逸らせ, その直後に左側から2 回目の飛出しが来る. 作成した道路の一部を図3.9 に示す. 図3.9 DS 上の道路 地点 A
第 4 章 実験結果
4.1 昨年度の実験結果概要(13) 第2 章研究背景で述べたように,ISO 及び NHTSA から提案された搭載機器評価,すなわ ち 2 次タスクを加味した時の道路を参考に環境道路の作成及びその評価法について検討し た.ISO 提案道路の LCT(車線変更試験)試験,NHTSA による注意散漫を評価する方法に関 してそれぞれの結果を得た.それらを参考にディストラクションを評価できる道路を作成し, 結果を得た.また運転者の精神負荷をセンシングできる手法として,皮膚電位計測も行い, 評価できることが確認できている.一例として,平常時の皮膚電位と飛び出およびし先行車 の急停止のイベントが発生した時の時間と皮膚電位変化を図4.1 と図 4.2 に示す. 図4.1 平常時皮膚電位と時間の関係 ①:車両飛び出し,②:先行車停止 図4.2 イベントによる皮膚電位の変化 -4.00E-02 -3.80E-02 -3.60E-02 -3.40E-02 -3.20E-02 -3.00E-02 -2.80E-02 -2.60E-02 0 10 20 30 40 50 60 70 80 90 100 po te nt ia l[V ] measurement time[s] 0.00E+00 2.00E-04 4.00E-04 6.00E-04 8.00E-04 1.00E-03 1.20E-03 0 10 20 30 40 50 60 70 80 90 po te nt ia l[V ] measurement time[s] 1 1 2 14.2 視線計測による実験結果 被験者は普通免許証を有している大学生や研究者であり,実験内容を十分説明し,インフ ォームドコンセントを得ており,いわき明星大学倫理委員会承認のもと実験を行った.今回 の被験者は9 名で,男性 6 名,女性 3 名である. 先行車追従をして画面上に現れる赤色マークを認識する試験を行った結果を述べる.ただ し先行車追従だけを指示したこともあり,被験者の中に先行車と自車の距離に相違が見られ た.そこで先行車と自車の距離から3 グループに分けることにした.A:先行車にかなり接 近し走行するグループ,B:先行車の距離が適度,C:先行車の距離にかなりゆとりがある, とした.分類の結果A は 2 名,B は 3 名,C は 4 名であった. 図4.3 に各グループの認知した割合を示す. 図4.3 各グループによる認知した割合 図から分るように,接近して追従した場合と,余裕を持ち車間距離を広く開けていたグル ープの認知した割合は比較的高く,ほどよく追従した被験者の見逃しが多い.これらの要因 は種々考察できそうであるが,ここでは種々分析を試みることにする. (1) 視線の分布 (2) 停留時間頻度分布 (3) 停留時間の場所との関連 A/2 B/3 C/4 平均 40 20 25 0 10 20 30 40 50 60 70 80 90 100 視 認 し た 割 合( % )
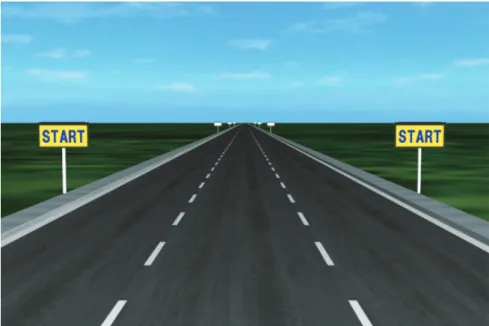
図4.4 に被験者全員の視線の分布を先の A,B 及び C の分類で示す. 図4.4 被験者 9 名全員の視線計測結果 試験結果は接近して走行している被験者A あるいは余裕のある運転被験者 C の方が,程 よい距離を保ち,走行している被験者B よりも比較的視野は広かった.また共通して言える ことは左右下方の領域に密度が薄いことも分から.さらに視野の分析をするため各グループ 1 名を抽出し,視線解析を行う.なお運転姿勢は体格や運転の癖などから運転位置がずれる データ解析においてできるだけ目線の位置が中央になるように補正している. 図4.5~図 4.7 の 3 グループの視線分布を示す.視線分布からもやはり全体で見た場合と 同様違いが表れている.
図4.5 グループ A の被験者 A の両目視線分布 図4.6 グループ B の被験者 B の両目視線分布
被験者
A_視線
右 左被験者
B_視線
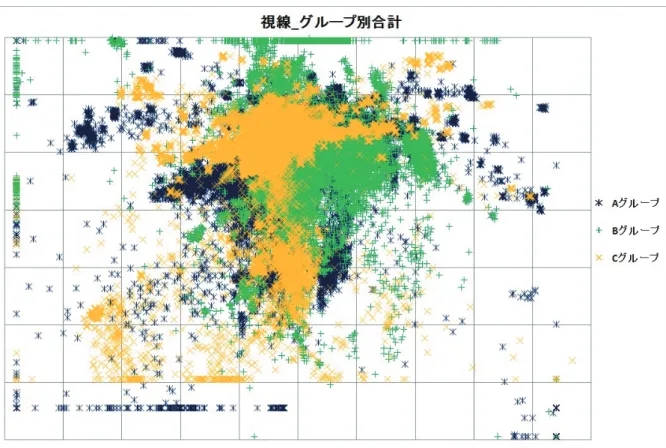
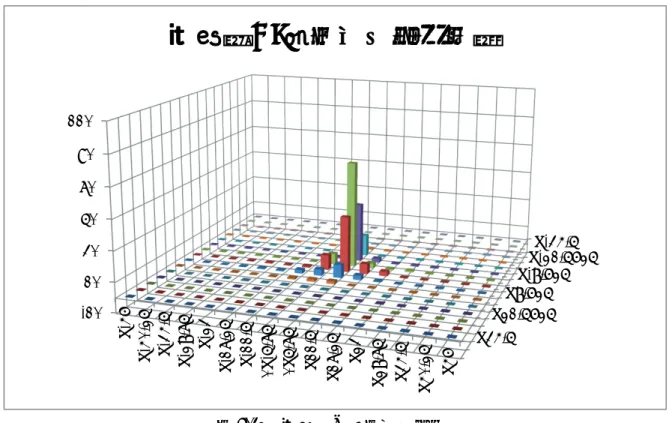
右 左図4.7 グループ C の被験者 C の両目視線分布 視線分布はどのグループでも中央付近に集まり,左右に広がっていること,また左右下方 向に視線が向けられていないことが分かる. 前年度,ものの確認には先ず視線がその方向へ向き,その地点ないし領域にある程度視線 が留まる時間が必要であることを見出した.これによってはじめて視覚・視認ができる.こ こではその時間を停留時間と定義する. 次にその停留時間の分布を分析することにする.図4.8~図 4.10 に同じ被験者の停留時間 分布を示す.平面上は見る視界を表し,高さ方向はその停留時間の累積による大きさを示す. 被験者A は全体的に視野全体に視線を当てている.被験者 B は中央付近に集中し,周辺に はあまり視線を当てていない.被験者C は A と同様な傾向を示し,さらに上下方向にも視 線を当てていることが分かる.
被験者
C_視線
右 左図4.8 被験者 A の領域別停留分布 図4.9 被験者 B の領域別停留分布 ~34.5 ~21.5625 ~8.625~-8.625 ~-21.5625~-34.5 0 20 40 60 80 100 ~-4 6 ~-40. 25 ~-3 4. 5 ~-28. 75 ~-2 3 ~-17. 25 ~-1 1. 5 0~ -5. 75 0~ 5. 75 ~11. 5 ~17. 25 ~23 ~28. 75 ~34. 5 ~40. 25 ~46
被験者
A_領域別停留点時間
~34.5 ~21.5625 ~8.625~-8.625 ~-21.5625~-34.5 0 10 20 30 40 50 60 70 80 90 100 110 ~-4 6 ~-40. 25 ~-3 4. 5 ~-28. 75 ~-2 3 ~-17. 25 ~-1 1. 5 0~ -5. 75 0~ 5. 75 ~11. 5 ~17. 25 ~23 ~28. 75 ~34. 5 ~40. 25 ~46被験者
B_領域別停留点時間
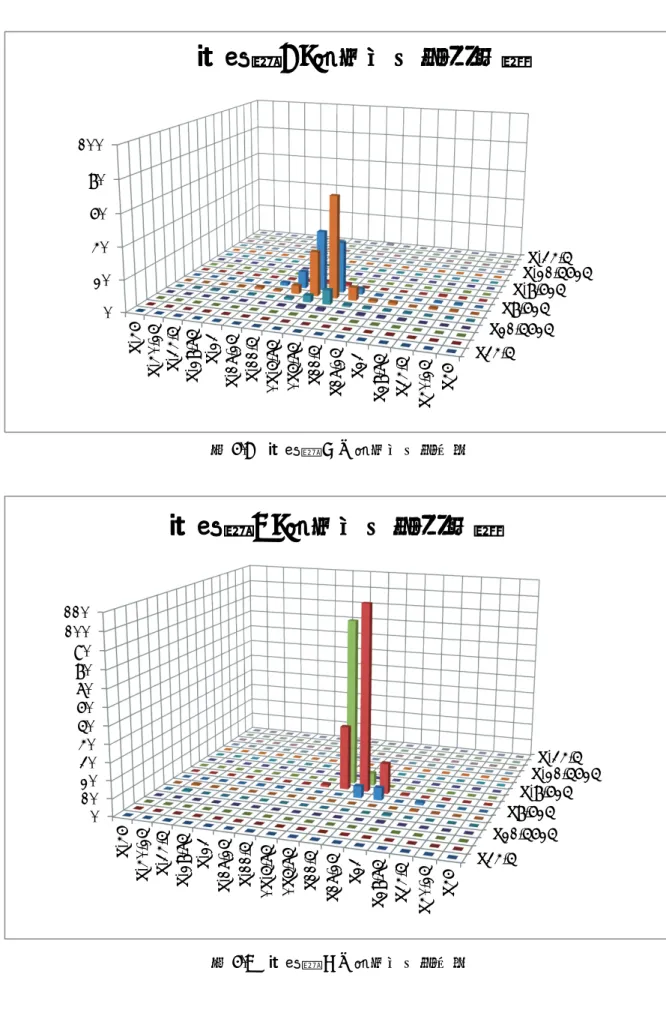
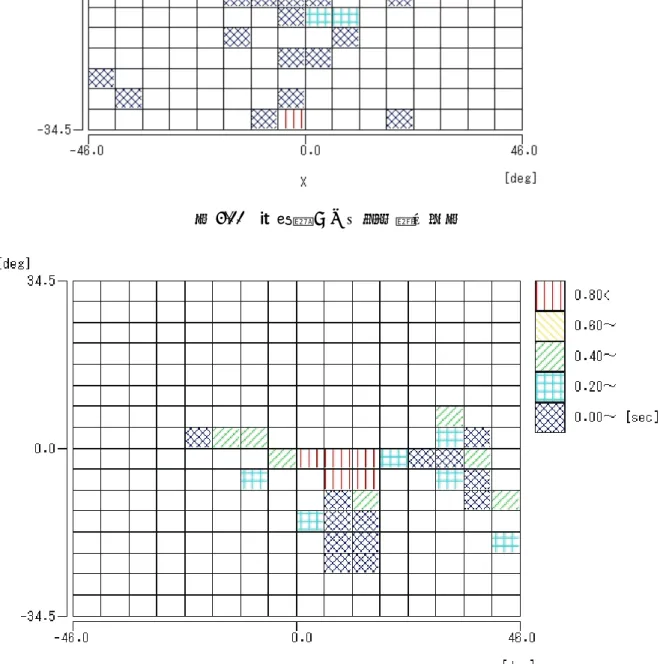
図4.10 被験者の領域別停留時間 目標物の検出と認知の関係にはこれまでの研究から停留時間には閾値が存在するのでは ないかと推定してきた.ビデオカメラによるこれまでの研究では閾値は約0.2 秒であった. このことはレンズの役割を果たす光を通す眼球とこれらの情報を脳に伝え,次の行動を起 こすためにはある時間が必要であることはよく知られている.視覚と認知には先ず対象物に 視線が行き,次の認知にはある時間,すなわちここで論じている停留時間が認知に関与する と仮定し,認知と停留時間を調査する.ただし,結果的に見逃したという事象と停留時間の 対応は現在のところ取れていないので,時間を0.2 秒間隔でその分布図を作成した.結果を 図4.11~図 4.13 に示す. ~34.5 ~21.5625 ~8.625~-8.625 ~-21.5625~-34.5 -10 10 30 50 70 90 110 ~-4 6 ~-40. 25 ~-3 4. 5 ~-28. 75 ~-2 3 ~-17. 25 ~-1 1. 5 0~ -5. 75 0~ 5. 75 ~11. 5 ~17. 25 ~23 ~28. 75 ~34. 5 ~40. 25 ~46
被験者
C_領域別停留点時間
図4.11 被験者 A の停留時間分布図
図4.13 被験者 C の停留時間分布図 先行車を追従しながら,すなわち2 次タスクが与えられた条件で特徴的な事柄が得られた. すなわち,対象物を見逃す要因が明らかにされた. (1) 運転中人は本質的に全ての視野を見渡しているわけではない. (2) 左右水平方向には比較的目線が行っている. (3) 上下方向は視野が狭く,頻度も少ない.特に左右下方向に目線が行っていない. (4) たとえ目線が行っても停留時間が極めて短い. 4.3 皮膚電位による実験結果 飛び出し時の皮膚電位反応を調査する.作成したコースは3.3.2 (2)で述べたようなコース を使用する. 被験者は普通免許証を有している大学生や研究者であり,実験内容を十分説明し,インフ ォームドコンセントを得ており,いわき明星大学倫理委員会承認のもと実験を行った.今回 の被験者は9 名で,すべて男性である.イベント状況は先に述べたがここで再び記述する. 車両速度時速60km/h A 地点:進行右側から車両の飛び出し C1 地点:先行車と並走 C2 地点:左へ車線変更 B 地点:進行左側から車両の飛び出し
図4.14 に時間時歴と皮膚電位との関係をイベント発生時点での地点を記入し示す. 図4.14 時間時歴と皮膚電位の関係 図から明らかなようにイベントに対応して皮膚電位の変化が表れている。ただしA 地点 では被験者は反応できずやり過ごした結果である(すなわち衝突している). このように皮膚電位の変化でイベントに対応して反応を計測できることが昨年度と同様 に再確認できた. -1.00E-01 -8.00E-02 -6.00E-02 -4.00E-02 -2.00E-02 0.00E+00 2.00E-02 4.00E-02 6.00E-02 8.00E-02 1.00E-01 0 10 20 30 40 50 60 70 80 90 100 110 120 130
被験者
9
A
B
(その後のハン
ドル操作で焦り)
C
1
C
2
0 10 20 30 40 50 60 70 80 90 100 右利き/左利き 男/女 20代/30代/40代 (%)
第 5 章 考察
ここで左右下方方向(領域)の見逃しの多い原因を考察する. 運転中ドライバーは両眼で見ているが,両眼が同じ程度の機能を持っているかは定かでは ない.しかし従来の研究では利き手と同じように利き目を持っていることが知られている. そこで,試験前に被験者の傾向を見ていた図5.1 に結果を示す.また文献によると調査結果 から,右利き目の被験者は約90%であった.文献(12)では,右利き目の男女平均が約 72.8 であり,これに比べれば割合は少し高い. なお利き目の調査の仕方は両指で輪を作り,対象物を輪の中に入れ,片目で確認し,見え た目を利き目とする. 図5.1 被験者の利き目の調査結果(全体,性差及び年代別) また視力の影響も受けると考え視力についても考察した.図5.2 に眼球の中心(中心視近 傍)と周辺(周辺視)の視力を表している.図から分るように中心視では視力は相当である が,周辺視に至ると視力は悪化の方向へ急変し下がる.ただし,周辺視は移動物体に感度は 良いようであるが,今回赤いターゲットは静止している. 一方,目の運動を司るのは筋肉であるが,その筋は水平方向に2 本,斜め方向に 6 本,上 下の運動を支える筋はない.図5.2 眼球特に中心視と周辺視と視力の関係(12) 以上のように人には利き目があり,被験者はほとんど右利き目であり,視力は中心視が高 く,周辺視が極端に低く,さらに眼球の移動を司る筋肉配置から考察すると, ・見逃しは日常茶飯事起こり得る事柄である この対応には眼球の移動だけでなく,視線を移動させるために顔を動かさなくてはならな い. さらに人の視覚は波の感知,すなわち音は縦波で固体伝播や空気伝播でよく反応できるが, 一方可視光は横波で,光から脳への伝播に時間がかかり,目の欠点,例えば盲点を脳の細胞 でこの欠点を補い,経験などから思い込みなど錯視の影響,さらに脳と目との運動機能が音 と脳の運動機能が劣っている生体機能でもある.このような事実を踏まえ更なる研究が必要 である.
第 6 章 まとめと今後の課題
昨年度の研究ではドライバーによる事故要因を定量的に把握するための基礎調査や実験 を行った.人は絶対距離感は開閉空間でも兼ね備えていなこと,運転者の反応時間などを把 握するための評価道路を提案でき,その妥当性を生体特性の一つ皮膚電位計測で評価できる ようになったこと,具体的方法としてPDT(Peripheral Detection Task:周辺検出課題)を用い た実験の結果,ターゲット認識時にはビデオカメラで0.2 秒前後の視線固定を確認でき,見 落とし時には視線固定が起こらないことから,視線の動きによって見落としの判断が出来る ことが分かったこと,但し,視線のみの判断では見落とした対象を把握することが出来ない 為,道路情報との相互分析が必要となる.実際の交通状況では PDT で用いたターゲットに 変わり,障害物の位置や歩行者の飛び出し等の危険事象を道路情報から読み取る必要が出て くること,それらの事故対象となり得るものへの判断基準を設定することが出来れば走行映 像と運転者の目線の動きを比較することで見落としの瞬間を特定することが可能であるこ となどが分った. 昨年度の主な研究成果を以下に示す. 1. DS での試験において短期運転試験による座圧測定では結果が得にくい. 2. 皮膚電位の結果から,精神的負荷がかかる状況では生体信号に明確な変化が現れる ことが確認できた.なお事前に事象を意識することで今回定義した精神的負荷には 該当しない. 3. 閉空間では,特に現実では正解距離よりも短い距離を申告する傾向がる.開空間で は個人差が出やすく回答では距離の範囲がばらつく傾向がある.人の絶対的な距離 感の指標は確認できなかった.距離感は人間が過去に見た記憶や,過去の経験,周 辺にある物などを一種の基準として用い,距離を推測しているだけだと考えられる. 人は絶対距離感を遠方に対してあまり持ち合わせていないと考えられる. 4. PDT 反応時,0.2 秒程度の視線固定が見られる.ターゲット見落とし時は視線固定が 見られなかった.運転中は運転負荷が与えられることでPDT 反応時間が遅くなった. 5. 60km/h での走行時において 6 秒以上(約 100m 移動)の見落としが発生する. 6. ターゲット表示時間が 1 秒未満になると見落とし率が 40%と大幅に上がる. 7. 皮膚電位及び脳波と入眠の関係が少し明らかになった. 前年度作成したDS 評価コースに加え新たなコースで今後より詳細な注意散漫に関する研 究を視線計測装置の導入とこれまで行ってきた皮膚電位計測を総合的に駆使し,事故原因の 定量的メカニズムの解明を図った結果次のことが分った. (1) 運転中人は本質的に全ての視野を見渡しているわけではない. (2) 左右水平方向には比較的目線が行っている. (3) 上下方向は視野が狭く,頻度も少ない.特に左右下方向に目線が行っていない. (4) たとえ目線が行っても停留時間が極めて短い.
さらに考察から次のことが分った.すなわち人には利き目があり,被験者はほとんど右利 き目であり,視力は中心視が高く,周辺視が極端に低く,さらに眼球の移動を司る筋肉配置 が水平方向には有利だが上下,また斜め下へは困難性を生じることから考察すると, “見逃しは日常茶飯事起こり得る事柄である”. この対応には眼球の移動だけでなく,視線を移動させるために顔を動かさなくてはならない. さらに人の視覚は波の感知,すなわち音は縦波で固体伝播や空気伝播でよく反応できるが, 一方可視光は横波で,光から脳への伝播に一度光から電子信号への変換が必要で時間がかか り,目の欠点,例えば盲点を脳の細胞で既にこの欠点を補われており,また経験などから思 い込みなど,錯視の影響,さらに脳と目との運動機能が音と脳の運動機能が劣っている生体 機能でもある.このような事実を踏まえ更なる研究が必要である. 参考文献 (1) 村上元彦,どうしてものが見えるのか,岩波書店,1995.
(2) ISO26022,Road vehicles - Ergonomic aspects of transport information and control systems - Simulated lane change test to assess in vehicle secondary task demand,2010-09-01.
(3) National Highway Traffic Safety Administration,Visual-Manual NHTSA Driver Distraction Guidelines for In-Vehicle Electronic Devices,Docket No. NHTSA-2010-0053.
(4) 白石修士,本田技術研究所栃木研究室,運転教習のための小型ドライビング・シミュレー タの研究,自動車技術,Vol.55,No.11,2001. (5) 渋谷浩平,櫻井俊明,齊藤祐弘,川崎康博,長谷川光洋:ドライビング・シミュレータ におけるリアルワールド再現技術に関する研究,自動車技術会関東支部2011 年度学術研 究講演会,2012-3. (6) 渋谷浩平,櫻井俊明,運転時の疲労と座圧・背圧分布に関する研究,日本機械学会東北 学生会第41 回卒業研究発表講演会,813,2011.
(7) T. Sakurai and S.Oikawa, The development of equipment to detect alcohol in the human body, 22nd international Technical Conference On the Enhanced Safety of Vehicles (ESV) ,11-0441, 2011. (8) 渋谷浩平,櫻井俊明,齊藤祐弘,川崎康博,長谷川光洋,ドライビング・シミュレータ における諸特性評価に供する道路作成,自動車技術会 2012 年度秋季大会学術講演会, 71-20125656, 2012/10/3. (9) 櫻井俊明,渋谷浩平,浜尾和秀,体圧分布変動及び皮膚電位活動を用いた運転者の精神 的負荷評価,日本機械学会2012 年度年次大会,J121012,2012/9/9-9/12. (10) NAC 講習会 2012.
(11) Toshiaki Sakurai,Kohei Shibuya,Yuko Saito,Yasuhiro Kawasaki and Koyo Hasegawa,A Basic Study On Human Distance Perception,The 12th Asia-Pacific ITS Forum & Exhibition 2012,
2012-4.
第2 号,1983-8. (13) 櫻井俊明,平成 24 年度タカダ財団助成研究結果報告諸.2014.3. 謝辞 視線計測装置はナックテクノロジ㈱からご協力を頂いた.お礼申し上げます. 本研究は平成25 年度タカタ財団からご支援を頂き行うことが出来ました.この場をお借り して関係者の皆様に心からお礼申し上げます.