組み込みソフトウェア開発技術:3.組み込みソフトの検証技術
4
0
0
全文
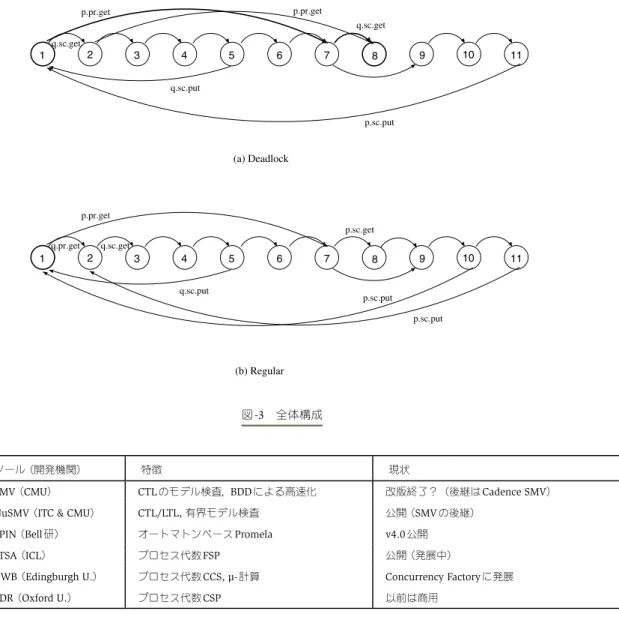
(2) 3. 組み込みソフトウェアのモデル検査技術入門. ������. ������. ����. ������. �������. �. �. �. �. �. �. ������. �. �������. ����������. 図 -1 プロセス構成. ������. ������. �. �. ����. ������. �. �. � ������. 移ダイアグラムあるいは Statecharts を考えればよい.状 ����������. 態遷移モデルを基本として,適切な通信機構を導入した チャネル通信オートマトンやプロセス代数の考え方でデ ザインを表現する.. ������. ������. �. �. モデル検査の技術. �. � ������. ������. �����������. �����������. モデル検査は,対象を有限の状態空間で表現できるシ ステムに限定し,状態空間の網羅的な探索を行うことで. 図 -2 状態遷移モデル. 不具合を発見する技術である.. ●簡単な例. RESOURCE はプリンタとスキャナを表すプロセスで,. 簡単な並行システムの例を用いて基本的な考え方を紹. 初期状態において獲得 (get) 待ちとなり,その後,解. 6). 介する .. 放 (put) だけを受け取る.解放されると初期状態に戻. 図 -1 に示すように,2 つの利用者 P と Q とが,2 つの資. る.P プロセスはプリンタ,ついで,スキャナを獲得し,. 源 Printer と Scanner を使う状況を考える.利用者は. copy 動作を行った後,順に 2 つの資源を解放する.Q プ. スキャナから読み込んだデータをプリンタにコピー出力. ロセスはスキャナを先に獲得する点だけが P と異なる.. する.この作業を行うためには Printer と Scanner の. 図 -2 に状態遷移モデルでの表現を示した.. 2 つの資源を同時に必要とする.資源を獲得した利用者. ||ZENTAI1 は,以上 4 つのプロセスを並行合成した. が作業を完了して解放するまで,もう一方は待たされる.. システム全体を表す.図 -3(a)がシステム全体の状態遷. ところが,資源獲得の順序によっては,互いに相手の. 移記述である.状態 1 から開始したシステムは状態 8 に. 作業完了待ちのデッドロックに陥ることが容易に分か. 至ると出力遷移がないため,これ以降動作を続けること. る.すなわち,P が Printer を獲得し,Q が Scanner を. ができない.状態 8 がデッドロックになる.. 獲得すると,双方とも作業を進めることができない.こ. 図 -3(a)の状態空間を調べると,初期状態 1 からはじ. の問題をモデル検査の方法で見つけることを考える.. まり,デッドロック状態 8 に至る遷移系列は次の 2 つが. 第 1 に,対象となる問題を抽象化して本質だけを抜き. あることが分かる.. 出す.利用者と資源がやりとりする情報として,獲得と 解放だけを考えればよい.以下,この問題を仕様記述言 7). p.pr.get -> q.sc.get ->. 語 FSP を用いて表現する.. q.sc.get -> p.pr.get ->. RESOURCE=(get->put->RESOURCE) .. すなわち,この 2 つの遷移系列がシステムをデッドロッ. P=(pr.get->sc.get->copy->pr.put->sc.put->P) .. クに導くシナリオとなる. モデル検査ツール LTSA を用. Q=(sc.get->pr.get->copy->pr.put->sc.put->Q) .. いると,上記の FSP 記述をもとに自動的に不具合シナリ 7). オを求めることができる . ||ZENTAI1=(p:P||q:Q||(p,q)::pr:RESOURCE ||(p,q)::sc:RESOURCE) .. 次 に,Q の 記 述 を 変 更 し,プ リ ン タ の 後 に ス キ ャ ナ を 獲 得 す る Q2 と す る.こ の 時 の シ ス テ ム 全 体 は ||ZENTAI2 として定義することができ,また,その挙 IPSJ Magazine Vol.45 No.7 July 2004. 691.
(3) 特集 組み込みソフトウェア開発技術. ��������. ��������. �������� ��������. �. �. �. �. �. �. �. �. �. ��. ��. �. ��. ��. ��������. ��������. ������������. �������� �������� ��������. ��������. �. �. �. �. �. �. �. ��������. �. �������� ��������. �����������. 図 -3 全体構成. ツール(開発機関). 特徴. 現状. SMV(CMU). CTL のモデル検査,BDD による高速化. 改版終了?(後継は Cadence SMV). NuSMV(ITC & CMU). CTL/LTL, 有界モデル検査 . 公開(SMV の後継). SPIN(Bell 研). オートマトンベース Promela. v4.0 公開. LTSA(ICL). プロセス代数 FSP. 公開(発展中) . CWB(Edingburgh U.). プロセス代数 CCS, µ- 計算. Concurrency Factory に発展. FDR(Oxford U.). プロセス代数 CSP. 以前は商用. 表 -1 モデル検査ツール. 動は図 -3(b) になる.. モデル検査の技術に対する素朴な見方の 1 つは,前に 述べた例題のように,システム全体を表す有限の状態空. Q2=(pr.get->sc.get->copy->pr.put->sc.put->Q2) .. 間を網羅的に探索し,デッドロックなどの不具合を示す 状態の有無を調べることである.特に,これを安全性の. ||ZENTAI2=(p:P||q:Q2||(p,q)::pr:RESOURCE ||(p,q)::sc:RESOURCE) .. 解析と呼ぶ.どのような状況を不具合とするかは対象問 題依存であるが,先の例では,遷移先を持たない状態を 不具合とした.また,性質を時相論理の式で表現するこ 3). 図 -3(b)から分かるように,システムはデッドロックの. とも多い .実際,モデル検査という用語は時相論理式. ない意図通りの振る舞いを示す.. の検証方法からきている. 1970 年代から並行システムの仕様表現と検証を行う枠. ●検証ツール. 組として,時相論理による方法が知られていた.しかし,. 最近は,コンピュータのハードウェア性能が向上した. 検証対象のシステムならびに検証性質の双方を時相論理. こと,状態空間を表現するデータ構造や探索アルゴリズ. の式として表現し,その記述全体が妥当であることを演. ムの工夫などにより,実用的なモデル検査ツールが登場. 繹的に証明するという人手のかかる作業を必要とした.. している.多くは Web 公開されているので容易に入手で. 1980 年代になって,アメリカの E.Clarke グループと. きる.表 -1 に代表的なモデル検査ツールを示す.以下,. フランスの J.Sifakis グループが独立に,時相論理に対す. モデル検査の技術発展を簡単に振り返る.. る自動検査の方法を着想した .第 1 に,当該システム. 692. 45 巻 7 号 情報処理 2004 年 7 月. 3).
(4) 3. 組み込みソフトウェアのモデル検査技術入門. の大域的な状態空間を Kripke 構造と考える.第 2 に,そ. これを行うためには,対象システムの特性ならびに検証. の Kripke 構造が命題時相論理式のモデルであるか否か. すべき性質に熟知する必要がある.抽象化したために,. を決定するアルゴリズムを考案し,この決定アルゴリズ. システムが本来持っていた性質が失われてはならない.. ムをモデル検査手続きと呼んだ.特に命題時相論理の. 抽象化の作業は知的な要素が大きく,現状では多くの場. 1 つとして分岐時相論理 CTL(Computation Tree Logic). 合,ノウハウに依存する.. を導入し,具体的なアルゴリズムを提案した.すなわ. 第 2 に,組み込みシステムの特徴にかかわる課題があ. ち,Kripke 構造 M=(S, R, L) が,有限状態からなる並行. る.協調して全体の機能を果たす複数の状態遷移マシン. システムを表現するとする.ここで,S は状態の有限集. が,同一ハードウェアの上で適切に作動するためには,. 合,R は遷移関係,L はラベルつけ関数と呼ぶ.L は各状. ハードウェアの適切な配分,すなわち,スケジューリン. 態に対して当該状態で成り立つ命題を割り当てる関数で. グを行わなければならない.また,状態遷移マシンに実. ある.次に,当該システムが満たすべき性質を CTL の式. 行の優先順序がある場合,競合する複数のイベント間に. f として表す.この時,モデル検査の問題とは, 「論理式 f. 優先順序がある場合などを考慮する必要がある.外部事. を満たす状態の集合を求めること」, すなわち,. 象に周期性があるなどの時間的な制約を持つこともあ り,時間制約型スケジューリングを行うことも多い.. { s ∈ S |M, s|= f }. このようなスケジューリング問題に関しては,独自の 8). 技術が開発されている .現状では,モデル検査の技術 を求めることである.. による検証との関係は,個別対応のノウハウとすること. さて,モデルという言葉はソフトウェアの世界で,非. が多い.設計と検証を含めた全体について,系統的な取. 常によく使われる.オブジェクト指向モデリングや分. り扱い方法を整理することが大切である.. 析・設計の方法論,最近の MDA では,プログラムより. 最後に,大量販売・大量消費される組み込みソフト. も抽象的なデザインの記述をモデルと呼ぶ.一方,モデ. ウェアの問題の 1 つとして,リコール時に発生するコス. ル検査検証技法でのモデルとは,論理式(時相論理の式). トがある.これに対しては,ネットワーク経由の遠隔管. を満たす具体的な集合(Kripke 構造あるいはラベルつき. 理手法による自動置き換えなどの方法も実用化されてい. 遷移システム)のことである.. くと期待できる.しかし,正当な置き換えダウンロード. まとめると,デザインのモデル検査とは,抽象的な記. であるかなどのセキュリティに関連する事項が新たに発. 述である状態遷移モデルから作られる Kripke 構造があ. 生すると考えられる.すなわち,組み込みソフトウェア. り,これが当該システムが持つべき性質を表現した時相. の信頼性確保というと,従来は安全性の点だけを考えて. 論理式の具体的なモデルになっているか否か,すなわち. きた.しかし,今後は,安全性とセキュリティの検証を. 当該論理式を満たすか否か,を解析する検証方法のこと. 同時に考慮する必要があるといえる.. である.. 実用的な技術に向けて モデル検査の技術を組み込みソフトウェアのデザイン 検証に応用する際に問題となる課題を整理する. 第 1 に,モデル検査の技術一般の課題がある.素朴に は,網羅的な探索を行うことが方式の特徴であり,これ が大きな問題となる.探索が終了するためには,状態数 が有限でなければならない.現実的には,検証ツールが 作動しているコンピュータの計算資源の制約がある.す なわち,状態空間がメモリに入りきるか,計算が終了す. 参考文献 1)亘理誠夫 : 高信頼ソフトウェア技術の研究動向− ソフトウェア基礎 技術の確立に向けて−,科学技術動向,科学技術政策研究所,No.24, pp.22-30(Mar. 2003). 2)システム設計検証技術シンポジウム,独立行政法人産業技術総合研究 所関西センター尼崎事業所(Feb. 2004). 3)Clarke, E., Grumberg, O. and Peled, D. : Model Checking, The MIT Press(1999). 4)組込みシンポジウム論文集,情報処理学会ソフトウェア工学研究会 (Oct. 2003). 5)Lee, E. A. : Embedded Software, Advances in Computers, Vol.56, Academic Press(2002). 6)中島 震 : モデル検査検証のソフトウェア開発への応用,日本ソフト ウェア科学会 DSW04(Feb. 2004). 7)Magee, J. and Kramer, J. : Concurrency − State Model & Java Programs, Wiley(1999). 8)Cottet, F., Delacroix, J., Kaiser, C. and Mammeri, Z. : Scheduling in Real-time Systems, Wiley(2002). (平成 16 年 6 月 4 日受付). ることは分かっていても実用的な応答時間で答えが得ら れるのか,などが問題となる. そこで,対象システムを適切に抽象化することが重要 である.設計者あるいは検証者が,あらかじめ対象シス テムを抽象化し適切な規模の状態遷移システムを得る. IPSJ Magazine Vol.45 No.7 July 2004. 693.
(5)
図
関連したドキュメント
なお、関連して、電源電池の待機時間については、開発品に使用した電源 電池(4.4.3 に記載)で
今回工認モデルの妥当性検証として,過去の地震観測記録でベンチマーキングした別の 解析モデル(建屋 3 次元
機関室監視強化の技術開発,および⾼度なセ キュリティー技術を適用した陸上監視システム の開発を⾏う...
Issuers ; Proposed Rule, No-
