ロボット探査の予備実験に使用する
天窓・溶岩チューブ洞窟の類似地形について
*眞部広紀
**1,前田貴信
**2,長嶋豊
**3, 浦田健作**4, 染谷孝**5,
,
久間英樹
**6, 新部一太郎**7, 長谷川均**8, 岡本渉**9, 春山純一**10
, 岡本渉**9, 春山純一**10
On Landforms Analogous to Skylights and Lava Tube Caves for Preliminary Experiments of Robotic Exploration*
Hiroki MANABE**1, Takanobu MAEDA**2, Yutaka NAGASHIMA**3, Kensaku URATA**4, Takashi SOMEYA**5, Hideki KUMA**6, Ichitaro NIIBE**7, Hitoshi HASEGAWA**8, Wataru OKAMOTO**9, Junichi HARUYAMA**10
Key words: Lava Tube Cave, Skylight, Analogous Landforms, Robotic Exploration
Abstracts
In this paper, we discuss sandstone caves, limestone caves and tuff caves analogous to the skylights of lava tube caves for preliminary experiments of robotic exploration.
1.はじめに
黎明期の人類に避難所・住居・安息の場として利用さ れていた洞窟は、現代も畏敬と崇拝、好奇心・探究心 の対象になっている。闇に包まれた深奥部は不整地・
高低差・屈曲・狭窄が交錯する迷宮である。外界の影 響を受けにくい地下空間は、地形学・地質学・火山学・
地下水文学・生物学・地理学の調査フィールドを併せ 持つ。人類史や自然史の貴重なタイムカプセルであり、
科学者と探検隊の継続的な尽力により一部が明らかに なってきた。本研究グループは探検調査活動の容易化・
効率化・高精度化をテーマとして、洞窟の移動ロボッ ト・形状計測システムの開発に取り組むとともに、実 験候補地の予備調査と難易度による系統化を進め、ロ ボットやシステムの開発段階に対応した実証実験を行 ってきた1)2)3)4)5)6)7)8)9)10)。
2007年と2009年に火星や月の軌道探査機により、巨 大な縦孔が数多く発見され、洞窟を取り巻く研究状況に 大きな転換点があった11)12)13)14)15)。これらの縦孔の中に はチューブ型地下空洞の天井開口部(天窓 skylight)で あることが確実視されるものもあり、月・火星の形成史 や太陽系の起源に関する学術成果が期待されている。ま た、紫外線・宇宙線・隕石から防護された拠点基地候補 地や観測機器の設置場所として有望視されている。地球 外の縦孔・地下空洞の探査に向けて世界の宇宙研究機関 が動き始め、日本ではJAXAを中心にUZUME計画が 進められている 16)17) 。探査の成否を握る鍵は洞窟探検 調査作業の自動化と遠隔/自律制御システムであり、そ の要素技術の開発と実証には地球上の類似環境におけ るシミュレーション実験が不可欠である。月・火星の巨 大な縦孔・地下空洞の規模を再現できる実験候補地(地 球における溶岩チューブ洞窟の天窓)は見つかっていな い。しかしながら、対象を砂岩・石灰岩・凝灰岩の洞窟 や類似地形・部分地形まで広げれば、「巨大な規模の再 現」を見込むことができる。
本研究グループでは第一段階として、実験候補地の 忠実性 (fidelity) の条件のうち「溶岩チューブ洞窟の天 窓」を緩め、複数の実験プロジェクトにより段階的な規 模の漸増を目指すことにした。本稿では、ドローンと地 上ロボットの縦孔・地下空洞探査ミッションにおいて、
飛行経路や移動経路の類型化を試みる。また、今までの プロジェクトで調査した洞窟や類似地形をケーススタ ディとして、実験可能な経路の類型範囲を抽出する。
* 原稿受付 平成28年10月20日
**1 佐世保工業高等専門学校 一般科目
**2 佐世保工業高等専門学校 電子制御工学科
**3佐世保工業高等専門学校 特命教授
**4 大阪経済法科大学
**5 佐賀大学
**6 松江工業高等専門学校
**7島根大学
**8 国士舘大学
**9名古屋大学
宇宙航空研究開発機構 宇宙科学研究所
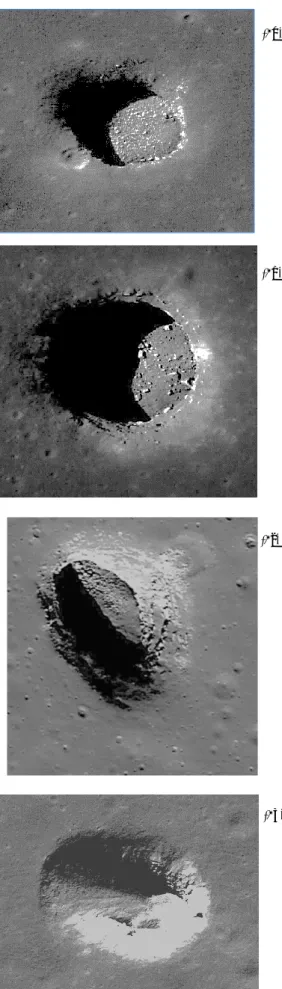
図2 縦孔・地下空洞壁面(模式図) 図1 月の縦孔地形
NASA Lunar Reconnaissance Orbiter Camera画像:
(1a)「Marius Hillsの縦孔」 ID: M122584310L (1b)「静かの海の縦孔」 ID:M126710873R (1c)「賢者の海の縦孔」 ID:M123485893R (1d)「Lacus Mortisの縦孔」 ID:M126759036L (1a)
(1b)
(1c)
(1d)
図3 縦孔・地下空洞の縦断面概念図 (3a)
(3b)
(3c)
2. 背景
21世紀に入り、JAXAの月軌道探査機SELeological and ENgineering Explorer(かぐや)やNASAの月 軌道探査機Lunar Reconnaissance Orbiter、火星軌道探 査機Mars Odyssey、Mars Reconnaissance Orbiterのカ メラ画像の解析から、月や火星の表面に縦孔が数多く 発見された11)12)13)14)15) (図1)。直径は数10 ~100 m 程度で垂直な壁面や急傾斜面を持つ。深さが直径の1 倍以上の縦孔もある。底の様子や斜め観測により、図 2のように地下空洞の天井部が崩落・陥没して地表に 開口した「天窓」と見なされる縦孔も存在する。また、
洞口辺縁の一部が崩壊してスロープを形成している ものもある(図1c, 3b, 1d, 3c)。
地下空洞は火成起源の横穴(熔岩チューブ洞窟)であ ることが確実視される中で、GRAILで観測された月 重力場の精密な解析により、長さ数 10km におよぶ 地下空洞の存在が裏付けられている 18)。現在、確認 されている地球の溶岩チューブ洞窟は幅 30m 程度 のものが最大級であるのに対して、月の重力加速度に 基づいた空洞の幅の上限値は数 100m~数 km 程度 と推定され、地球には例のない巨大な規模の溶岩チュ ーブ洞窟の存在を示唆している19)。今後、「溶岩チュ ーブ洞窟」という地質学的条件に忠実に実験候補地を 探しても「規模」の点では頭打ちであり、月・火星の 縦孔・地下空洞の規模に及ばない可能性が大きい。
一方、石灰岩地形では、ベトナム「Son-Doong Cave 」 (幅約150m)やボルネオ「Good Luck Cave」の「Sarawak Chamber」 (幅約400m)の規模が月・火星の空洞の推 定幅に近い。「天窓」である陥没ドリーネには、規模 が月・火星の縦孔に近いものもある。また、砂岩や凝 灰岩にも規模の大きい「天窓」や「溶岩チューブ洞窟」
に類似した地形がある。
探査シミュレーション実験は月・火星の縦孔・地下 空洞と規模の近い地形で行う方が望ましい。本研究グ ループでは第一段階として、「溶岩チューブ洞窟の天 窓」という条件を緩め、砂岩・石灰岩・凝灰岩の洞窟 や類似地形を選定して、さまざまな「規模」の実験候 補地を揃えることにした。
3. 地形と経路の類型
本節と次節では、各候補地の実験可能な範囲を策定
するために、ロボットの移動経路を区間や節点で表現 する。
3.1.ドローンの飛行経路
火星には非常に希薄であるが大気が存在するため、
地形的な起伏や低差の影響を受けにくいUAV、中で も偵察・撮影の用途が期待される回転翼型のドローン が検討されている20)21)22)。本研究グループでは、ドロ ーンによる縦孔・地下空洞探査の基本項目として、以 下の4点を挙げる:
P:縦孔の上空観察・撮影8)9)
Q:遷急線の観察・撮影
R:垂直壁・オーバーハングの観察・撮影8)9)
S:地下空洞入口の観察・撮影
図4 ドローンの進入飛行経路
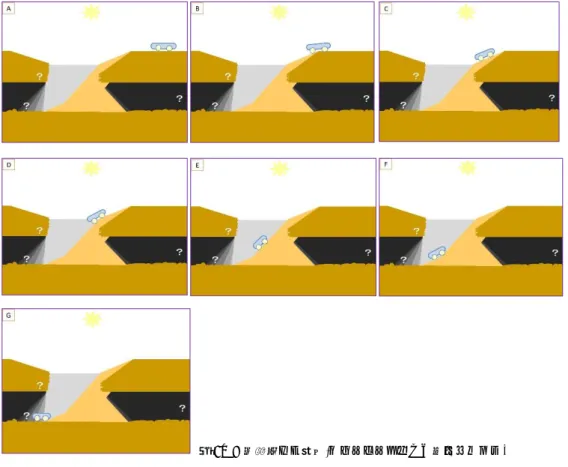
3.2. 地上ロボットの移動経路
ドローンと異なり地上ロボットは地形的な起伏や高 低差の影響を受けやすい。縦孔には垂直壁面やオーバ ーハングの部分もある(図5a,5bの区間E)。ここを鉛 直方向に移動するときには、接地移動(ローバー型・
クローラ型の走行、多脚型の歩行、匍匐型の這行)に 替わる別方式の移動機構が必要になる。HAKUTOプ ロジェクト のpreflight model (Tetris)23)やNASA Jet Propulsion Laboratory の Axel Rover24)の探査ミッ ション計画では、テザーケーブルを伸展して懸垂下降 する方式を採用している(図6c,6d)。ロボットの移動 経路に鉛直区間を含まない場合(図5c)は、HAKUTO プロジェクトの flight model25)のように従来の接地移 動方式を使用することもできる(図6a, 6b)。鉛直区間
の有無は、ロボットにテザーケーブル懸垂機構等を装 備する/しないの選択に直結する。
ロボットの移動経路について下記の条件を課せば、
図5のように縦断面図(展開縦断面)の中で模式化でき る:
[i] 出発点は縦孔辺縁部近くの地表に置く
[ii] 到達点は縦孔の底に置く
(地下空洞の入口付近が望ましい。)
[iii-1] 接地面の傾斜角が 90°未満のとき、移動方向
は傾斜方向から大きく外れない
[iii-2] 接地面の傾斜角が90°(垂直壁)のとき、移動方 向は鉛直方向から外れない
[iii-3] ロボットに最寄りの壁面の傾斜角が 90°以上
(オーバーハング)のとき、移動方向は鉛直方向 から外れない
※ [iii-2][iii-3]の経路部分が鉛直区間
上記の条件をみたす移動経路は無数にあるが、鉛直区 間の有無によって、縦孔は2つに大別できる:
Ⅰ型:鉛直区間を含まない経路がある (図5c)
Ⅱ型:すべての経路が鉛直区間を含む (図5a,5b)
「Lacus Mortis の縦孔」(図 1d)はⅠ型 26)であり、
「Marius Hillsの縦孔」(図1a)「静かの海の縦孔」(図1b)
「賢者の海の縦孔」(図1c)はⅡ型である。
4. 候補地の実験可能範囲
探査シミュレーション実験は期間をあけて複数回 行うため、時間・費用がかからない実験場所が望まし い。佐世保工業高等専門学校の所在地(長崎県佐世保 市)を中心にした九州・沖縄の実験候補地の例(図7~
19)について、以下の形式で実験可能範囲(記号は図5
に対応)を表す:
場所の名称(構成する岩石の種類、図番号)、所在地、
洞窟の形状(横穴、斜洞、縦穴等)、
実験可能範囲 図5 縦孔・地下空洞における
地上ロボットの移動経路
(5a)
図3a ドローンの飛行経路
(5b)
(5c)
図6a Ⅰ型縦孔への進入(テザーケーブルなし地上ロボット)
図6b Ⅰ型縦孔への進入(テザーケーブル付き地上ロボット)
図6d Ⅱ型縦孔への進入(テザーケーブル付き地上ロボット)
図6c Ⅱ型縦孔への進入(テザーケーブル付き地上ロボット)
(1)「泉福寺洞窟」(図7、砂岩) 長崎県佐世保市瀬戸越
横穴(岩陰)
ⅡBCDEFG2 、ⅡQR
(2)「御橋観音石橋」(図8、砂岩) 長崎県佐世保市吉井
天然橋(天窓の一部)
ⅡBCDEFG1、ⅡQR
(3)「牡鹿洞」(図9、石灰岩)4)5)8)9) 福岡県北九州市平尾台
縦穴+横穴
ⅡBCDEF(G1+G2)、ⅡPQRS
図9 「牡鹿洞」
図8 「御橋観音石橋」
図7 「泉福寺洞窟」
(4)「青龍窟」主洞西洞口側(図10、石灰岩)4)5)8)9) 福岡県苅田町(平尾台)
縦穴+横穴
ⅡBCDEF(G1+G2)、ⅡPQRS
(5)「青龍窟」主洞東洞口側(図11、石灰岩)4)5)8)9) 福岡県苅田町(平尾台)
縦穴+横穴
ⅡBCDEF(G1+G2)、ⅡPQRS
図10 「青龍窟」主洞西洞口側 図11 「青龍窟」主洞東洞口側
(6) 「大瀬洞」(図12、石灰岩) 熊本県球磨村大瀬
横穴(洞口、擂り鉢穴(半水没))+斜洞(水没)
ⅠABCDEFG、ⅠPQRS
(7) 「岩戸洞」(図13、石灰岩) 1) 熊本県球磨村神瀬
横穴(洞口、擂り鉢穴(半水没))+斜洞(水没)
ⅠABCDEFG、ⅠPQRS
図13「岩戸洞」
図12「大瀬洞」
(8)「溝ノ口洞穴」(図14、凝灰岩) 鹿児島県曽於市財部
横穴
ⅡFG1 、ⅡPQRS
(9)「浅間湾屋洞穴」(図15、石灰岩) 鹿児島県徳之島天城町
縦穴+横穴(水没)
ⅡBCDEF、ⅡPQR
図15「浅間湾屋洞穴」
図14 「溝ノ口洞穴(岩穴)」
(10)「陸軍病院山城本部壕」(図16、石灰岩) 沖縄県沖縄島八重瀬町
縦穴+横穴
ⅠABCDEF(G1+G2)、ⅠPQRS
(11)「ティラヌガマ」(図17、石灰岩) 沖縄県沖縄島読谷村都屋
縦穴+横穴
ⅡABCDEF(G1+G2)、ⅡPQRS
図17「ティラヌガマ」
図16「陸軍病院山城本部壕」
(12)「鍋底」(図18、石灰岩)10) 沖縄県宮古島市下地島
縦穴(半水没)+横穴(水没)
ⅠABCDE、ⅠPQR、ⅡABCDE 、ⅡPQR
(13)「通り池」(図19、石灰岩)10) 沖縄県宮古島市下地島
縦穴(半水没)+横穴(水没)
ⅡABCDE 、ⅡPQR
4. まとめ
洞窟学を中心とした理学側の要請から、石灰洞や玄 武岩溶岩洞のカテゴリーの中で、規模が大きい洞窟の レーザー計測、精密な3次元点群モデル作成、アーカ イブ化を目的とする分野横断プロジェクトを本研究 グループは進めていた 5)6)7)8)。近年、地球外洞窟の探 査ロボットシステムをテーマとする工学側の要請が 加わり、洞窟と周辺地形の形状データを探査シミュレ ーション実験用の“研究資源”として利用する道が 拓けてきた。本稿では、“研究資源”を整備する拡大 プロジェクトの立ち上げを報告した:
月や火星に発見された縦孔・地下空洞のロボット探 査に向けて、探査シミュレーションの予備実験を行う ために、「溶岩チューブ洞窟の天窓」の類似地形から 実験候補地を選定した。地上ロボットの移動経路に含 まれる鉛直区間の有無を基準に候補地を分類して、ド ローンと地上ロボットの実験可能範囲を評価した。こ れらの評価は現場確認踏査による所見に基づく。
5. 課題
①候補地の「規模」を段階的に大きくしていくために、
海食洞や急崖地の類似地形も検討する。
②「規模」が大きい候補地の全体像を撮影するために、
ドローンによる空中撮影を行う。作業の効率化を図り、
GPS制御によるオートパイロット法を導入する。
③候補地の定量的解析と評価を行うために、撮影した 画像から写真計測により3次元モデルを作成する。
上記の各課題に対する実績・準備状況は以下の通り である:
図18「鍋底」
図19「通り池」(一の池・二の池)
①該当場所の選定が済み、下見・予備調査のプロジェ クトシリーズを計画している。1回目は関東地方以西 の該当場所を対象とする。
②本研究グループ全体として複数機のマルチロータ ードローンを保有し、サンゴ礁浅海域のGPS制御オ ートパイロット法で空中撮影を実施済みである 27)。 また、縦穴上空からの空中撮影にも成功している8)9)。
③写真計測ソフトウェアの導入を準備している。
6. 今後の展開
火星探査の分野では複数機の UGV(ローバー)と UAV(ドローン)による協同ミッションの検討が開始 されている28)。本研究グループでは、洞窟探査に対応 できる地上ロボット(ローバー)とドローンの研究を 進めてきた8)9)。今後は「ローバー+偵察用ドローン」
を基本的な枠組みとした火星の縦孔・地下空洞探査ミ ッションを目標に設定して、シミュレーション実験を 実施する。
謝辞
本研究はキヤノン財団助成プログラム「理想の追求」
第 2 回『陸海域カルスト水文系の追跡によるロボッ ト探査とマッピング』(代表 眞部、平成22~24年度) の助成費の一部、科学研究費補助金(基盤C(一般))『水 没によって閉鎖された空間環境を探査する水中・非水 中ロボット複合システム』(代表 眞部、平成25~27年 度)と『地球外の縦孔・地下空洞を含む洞窟地形の計 測システムと3次元モデルの活用』(代表 眞部、平成
28~30年度)の補助の一部により進めました。
沖縄本島の候補地を踏査するにあたり、NPO 法人 沖縄鍾乳洞協会理事長の山内平三郎氏に大変お世話 になりました。深く感謝申し上げます。
参考文献
1) 眞部広紀,浦田健作, 須田淳一郎, 球磨山地カルストの水文地質予備調査,
佐世保工業高等専門学校研究報告第47号pp.45-50 (2010)
2) 眞部広紀, 長嶋豊, 浦田健作, 染谷孝, 下尾浩正, 前田貴信, 三宅飛翔, 柴田裕貴,原崎芳加, 原田明, 白川知秀,福岡聡紀 :
水中洞窟系のロボット探査と ソナーによる形態計測の予備実験,
佐世保工業高等専門学校研究報告第49号pp.51-64 (2013) 3)眞部広紀,前田貴信,井手雄太,市丸智裕,
地上移動型ロボットを使用した 計測システムの開発と三次元モデル,
第 40 回日本洞窟学会学術講演会(七釜大会) (2014) 講演要旨集pp19-20,
4) 眞部広紀,前田貴信,市丸智裕,井手雄太,
飛行ロボットを用いた洞窟測量に関する基礎研究
―小型計測システムの開発と 3 次元環境地図作成―,
第 40 回日本洞窟学会学術講演会(七釜大会)
5) 眞部広紀, 前田貴信, 浦田健作, 井手雄太, 市丸智裕, 平尾台カルスト青龍窟における
レーザー測域センサーを使用した移動計測の予備実験,
佐世保工業高等専門学校研究報告第51号pp.28-33 (2015) 6)久間英樹,眞部広紀,新部一太郎,森内敦史, 福岡久雄, 3 次元レーザスキャナを用いた洞窟の形状測定,
第 59 回宇宙科学技術連合講演会講演集(2015) #3D03 7) 新部一太郎, 久間英樹, 眞部広紀,
竜渓洞の 3 次元レーザー測量による詳細マッピングと データ展開の可能性,
日本洞窟学会第 41 回大会(高知大会)学術講演会 (2015) 8) 眞部広紀, 前田貴信, 久間英樹, 新部一太郎, 浦田健作, 染谷孝, 春山純一,
洞窟探査のためのレーザー計測と3次元モデルについて 佐世保工業高等専門学校研究報告第52号pp.16-21 (2015) 9) 前田貴信, 眞部広紀,
マルチコプター(ドローン)を活用した 縦穴洞窟の形状計測
佐世保工業高等専門学校研究報告第52号pp.8-11(2015) 10) 眞部広紀, 長嶋豊, 浦田健作, 山本祐二,
近藤正義, 岡本渉,
宮古諸島下地島の西沿岸域における アンキアライン陥没ドリーネ群の予備調査
佐世保工業高等専門学校研究報告第53号,(2016) 11) G. E. Cushing, T. N. Titus, J. J. Wynne, and P. R. Christensen THEMIS observes possible cave skylights on Mars
GEOPHYSICAL RESEARCH LETTERS, VOL. 34,
12) J. Haruyama, et al.
Possible lunar lava tube skylight observed by SELENE cameras,
GEOPHYSICAL RESEARCH LETTERS, VOL. 36, L21206, 2009,
13) J. Haruyama, et al., 2010,
NEW DISCOVERIES OF LUNAR HOLES IN MARE TRANQUILLTATIS AND MARE INGENII.
41st Lunar and Planetary Science Conference (2010) #1285 13) J. Haruyama et al., 2012, In: V. Badescu, (Eds.), Moon-Prospective Energy and Material Resources, Springer, pp.139
14) G.E. Cushing
CANDIDATE CAVE ENTRANCES ON MARS
Journal of Cave and Karst Studies, v. 74, no. 1, p. 33–47. 2012 15) G. E. Cushing and C. H. Okubo,
The Mars Cave Database
2nd International Planetary Caves Conference (2015) #9026 16)春山純一, 西堀俊幸, 岩田隆浩, 山本幸生, 河野功, 大槻真嗣, 嶋田和人, 桜井誠人, 小林憲正, 西野真木, 月火星の地下空洞直接探査リサーチグループ
月火星の縦孔・地下空洞探査UZUME 計画のめざすもの, 第60回宇宙科学技術連合講演会講演集(2016) #1C11 17) 河野功, 春山純一,岡田慧,星野聖,大山英明,床井浩平,
若林靖史,大槻真嗣,桜井誠人:
月火星縦孔地下空洞探査(UZUME)システムの研究, 第60回宇宙科学技術連合講演会講演集 ( 2016) #1C07 18) Sood et al.
Detection of Buried Empty Lunar Lava Tubes Using GRAIL Gravity Data,
2nd Intl. Planetary. Caves Conf., 20-23 October, (2015) #9016, 19)D. M. Blair, L. Chappaz, R. Sood, C. Milbury, H. J. Melosh, K. C. Howell, and A. M. Freed.
DETERMINING THE STRUCTURAL STABILITY OF LUNAR LAVA TUBES.
46th Lunar and Planetary Science Conference (2015) #2174 20) L.A.Young, E.W. Aiken, V. Gulick, R.Mancinelli, G.A.Briggs, Rotorcraft as Mars Scouts,
2002 IEEE Aerospace Conference, Big Sky, MT, March 9-16, 21) L.A. Young, E.W. Aiken, M.R. Derby, R. Demblewski, J. Navarrete
Experimental Investigation and Demonstration of Rotary- Wing Technologies for Flight in the Atmosphere of Mars
58th Annual Forum of the American Helicopter Society, International, Montreal, Canada, June 11-13, 2002.
22) 野玉達郎,梅崎修一,砂田茂,米澤 宏一,
火星探査用マルチロータ機の可能性検討
第60回宇宙科学技術連合講演会講演集(2016) #4C12, 23) 田中利樹, 吉田和哉, Britton Nathan他,
HAKUTO プロジェクトにおける月面縦孔探査を目指した
マイクロローバーの設計と開発状況,
第59回宇宙科学技術連合講演会講演集(2015) #3D08, 24) K. L. Mitchell, R. C. Anderson,
EXPLORING PITS AND CAVES WITH THE AXEL EXTREME TERRAIN ROVER.
2nd International Planetary Caves Conference (2015) #9022 25) 吉田和哉,及川拓人,Nathan Britton,John Walker,
清水 敏郎,田中利樹,古友大輔,袴田武史
HAKUTO ローバーのフライトモデル開発状況
第 60 回宇宙科学技術連合講演会講演集(2016) #2C08 26) Ik-Seon Hong, Yu Yi, Jaehyung Yu, Junichi Haruyama, 3D Modeling of Lacus Mortis Pit Crater with Presumed Interior Tube Structure,
Journal of Astronomy and Space Sciences 32(2), 113-120 (2015) 27) 長谷川均,
UAV(自律型飛行体)を使った高解像空中写真の撮影と活用
― サンゴ礁浅海域での事例 ― 国士舘大学地理学報告 No.22(2014)
28) J.Matthaei, T.Krüger, S.Nowa and U.Bestmann, Swarm Exploration of Unknown Areas on Mars Using SLAM International Micro Air Vehicle Conference and Flight Competition (IMAV2013)17-20 September 2013