作業用ロボットへのマイクロ波送電 および通信技術の開発に関する
フィージビリティスタディ 報 告 書
平成 19 年 3 月
財団法人 機械システム振興協会
委託先 財団法人 無人宇宙実験システム研究開発機構
この事業は、競輪の補助金を受けて実施したものです。
URL: http://keirin.jp/
わが国経済の安定成長への推進にあたり、機械情報産業をめぐる経済的、社 会的諸条件は急速な変化を見せており、社会生活における環境、都市、防災、
住宅、福祉、教育等、直面する問題の解決を図るためには技術開発力の強化に 加えて、多様化、高度化する社会的ニーズに適応する機械情報システムの研究 開発が必要であります。
このような社会情勢の変化に対応するため、財団法人機械システム振興協会 では、日本自転車振興会から機械工業振興資金の交付を受けて、システム技術 開発調査研究事業、システム開発事業、新機械システム普及促進事業を実施し ております。
このうち、システム技術開発調査研究事業及びシステム開発事業については、
当協会に総合システム調査開発委員会(委員長:政策研究院 リサーチフェロー 藤正 巖氏)を設置し、同委員会のご指導のもとに推進しております。
本「作業用ロボットへのマイクロ波送電および通信技術の開発に関するフィ ージビリティスタディ」は、上記事業の一環として、当協会が財団法人無人宇 宙実験システム研究開発機構に委託し、実施した成果をまとめたもので、関係 諸分野の皆様方のお役に立てれば幸いであります。
平成19年3月
財団法人 機械システム振興協会
本報告書は、財団法人無人宇宙実験システム研究開発機構が、平成 18 年度事 業として、財団法人機械システム振興協会から受託した「作業用ロボットへの マイクロ波送電および通信技術の開発に関するフィージビリティスタディ」の 実施内容をまとめたものです。
被災地などの危険な状況下でロボット等を用いて作業を行うことが考えられ るが、無線で指令を出すほかに動力となる電力も無線で送ることが可能ならば、
ロボットの行動範囲および作業時間の拡大につながります。また、移動ロボッ ト一般の使い勝手の向上、自由度の向上にもつながります。この場合、送受電 系も可搬で容易に展開できるように小型・軽量化されたものでなければならず、
通信機用の半導体・平面アンテナ技術を有機的に結合しなければなりません。
また、この技術が実証されれば、将来の大規模・超長距離マイクロ波無線送 電の実現に向け、大きく寄与するものであります。
このため平成 17 年度の検討結果を踏まえて作業用ロボットに対する無線送電 システムの適用検討、高効率・小型・軽量送受電システムの設計・試作・試験を 行いました。またロボットに対する無線送電実証試験を行い、マイクロ波送電 にデータ通信を共存させる技術(電力伝送を情報通信に干渉させないための技 術)についての基礎データを得るとともに超軽量・小型マイクロ波増幅回路の試 作・評価を行い将来の大規模マイクロ波送電実現のための基礎データを得まし た。
本フィージビリティスタディの成果が関連各位にとって参考となり、機械振 興の一助となれば幸いです。
平成19年3月
財団法人 無人宇宙実験システム研究開発機構
目次
序 はじめに
1. スタディの目的 ... 1
2. スタディの実施体制 ... 2
3. スタディの内容 ... 5
第 1 章 作業用ロボットに対する無線送電システムの適用検討 ... 6
1.1 目的 ... 6
1.2 無人小型飛行機に対する電力伝送 ... 6
1.2.1 旋回飛行小型無人飛行機... 6
1.2.2 蓄電池併用型無人小型飛行機 ... 10
第 2 章 システム設計 ... 13
2.1 開発の目的とねらい ... 13
2.2 システム仕様・構成 ... 16
2.2.1 システム仕様 ... 16
2.2.2 システム構成 ... 18
2.3 サブシステム仕様 ... 19
2.3.1 送電ステーション ... 19
2.3.2 無線ローバ ... 24
2.4 試験仕様 ... 28
2.4.1 単体試験 ... 28
2.4.2 システム試験 ... 28
2.5 開発体制 ... 28
2.6 開発計画 ... 29
2.6.1 平成 17 年度 ... 29
2.6.2 平成 18 年度 ... 29
第 3 章 マイクロ波電力送電系アレイおよび電源の設計・試作・試験 ... 30
3.1 送電部の構成 ... 30
3.1.1 構成 ... 30
3.1.2 送電部の性能 ... 31
3.2 設計 ... 35
3.2.1 AIA 部... 35
3.2.2 電源部 ... 41
3.2.3 冷却部 ... 42
3.3 試作 ... 47
3.3.2 冷却部... 53
3.3.3 電源部(外付け) ... 42
3.4 試験 ... 54
第 4 章 受電系レクテナアレイの設計・試作・試験 ... 67
4.1 昨年度試作のレクテナアレイの概要 ... 67
4.2 受電系レクテナアレイの設計検討 ... 76
4.2.1 受電電力の検討 ... 76
4.2.2 レクテナアレイの高効率化の検討 ... 84
4.2.3 整流回路の設計検討 ... 98
4.2.4 アンテナおよびレクテナ素子の試作・試験 ... 107
4.2.5 レクテナアレイの設計・製作 ... 112
4.3 レクテナアレイの試験 ... 124
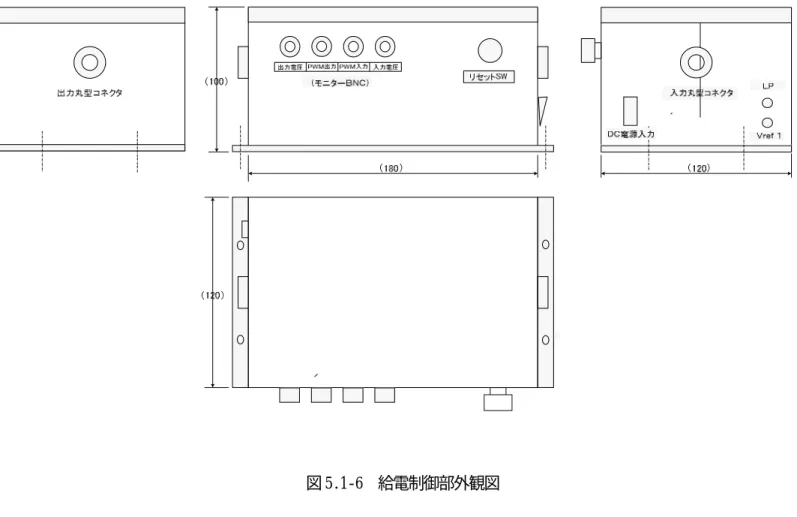
第 5 章 受電系給電制御部の設計・試作・試験 ... 139
5.1 レクテナアレイの高効率動作の検討 ... 139
5.2 給電制御部の設計検討 ... 141
第 6 章 システム総合試験準備 ... 147
6.1 作業用ロボット ... 147
6.2 構造変更の検討 ... 150
6.2.1 ローバ駆動制御システム ... 150
6.2.2 受電アンテナ支持機構 ... 151
6.2.3 経路制御機構 ... 152
6.2.4 ローバ制御ソフトウエア ... 153
6.3 インタフェース検討 ... 154
6.3.1 インタフェース回路 ... 154
6.3.2 走行経路 ... 157
6.3.3 追尾機構 ... 158
6.4 指令送受信系 ... 160
6.5 計測系 ... 162
6.5.1 計測項目 ... 162
6.5.2 計測系の構成 ... 162
6.5.3 バッテリ電流インジケータ ... 164
第 7 章 システム総合試験... 166
7.1 送電系と受電系組み合わせ試験 ... 166
7.2 システム総合試験 ... 172
7.2.1 試験内容 ... 172
7.2.2 試験評価 ...173
第 8 章 送電系 MMIC 開発... 181
8.1 設計方針 ... 181
8.2 試作と結果 ... 182
4. スタディの成果(まとめ) ... 185
5. スタディの今後の課題および展開 ... 186
参考文献 ... 187
1. スタディの目的
移動しながら作業を行うロボット等に、無線で電力やデータを送るマイクロ 波送電・通信システムの原型を構築し、送電能力、安定受電能力等を確認する。
被災地などの危険な状況下でロボット等を用いて作業を行うことが考えられ るが、無線で指令を出すほかに動力となる電力も無線で送ることが可能ならば、
ロボットの行動範囲および作業時間の拡大につながる。また、移動ロボット一 般の使い勝手の向上、自由度の向上にもつながる。この場合、送受電系も可搬 で容易に展開できるように小型・軽量化されたものでなければならず、通信機 用の半導体・平面アンテナ技術を有機的に結合しなければならない。
また、この技術が実証されれば、将来の大規模・超長距離マイクロ波無線送 電の実現に向け、大きく寄与するものである。
2. スタディの実施体制
本スタディの実施体制は、(財)機械システム振興協会内に「総合システム調査開発 委員会」を、(財)無人宇宙実験システム研究開発機構内に「マイクロ波技術委員会」
を設置し、マイクロ波送電技術や適用案について意見・アドバイスをもらいながら進め た。再委託先は、小型軽量化のマイクロ波の送受電システムの研究を実施している京都 大学、過去京都大学の MILAX 計画等に参画しマイクロ波の受電システムについて実績の あるアイ・エイチ・アイ・エアロスペースおよび文部科学省/農林水産省等のロボット計 画に参画した実績のある次世代技術に決定した。
各役割・構成は以下のとおりである。
・ (財)無人宇宙実験システム研究開発機構(調査研究部)は全体まとめ、適用検討、
試作品の概念設計を行う。
・ マイクロ波技術委員会は、京都大学、宇宙航空研究開発機構および情報通信研究機 構の専門家で構成し、適用検討、技術支援、設計レビュー、試作試験計画/試験結果 についての検討等を行い報告書原稿のレビューを実施する。
・ 再委託先の京都大学は、送電系の設計・試験を実施する。アイ・エイチ・アイ・エアロ スペースは受電系の設計・製作および送受電試験を行う。次世代技術は総合試験系の
(財)機械システム振興協会 総合システム調査開発委員会
(財)無人宇宙実験システム研究開発機構 (USEF)
マイクロ波技術 委員会
アイ・エイチ・アイ・エアロスペース:受電系の設計・製作およ び送受電試験
委託
再委託
次世代技術:総合試験系の設計・製作および試験 調査研究部
京都大学:送電系の設計・試験
総合システム調査開発委員会委員名簿
(順不同・敬称略)
委員長 政策研究院 藤 正 巖 リサーチフェロー
委 員 埼玉大学 太 田 公 廣 地域共同研究センター
教授
委 員 独立行政法人産業技術総合研究所 金 丸 正 剛 エレクトロニクス研究部門
副研究部門長
委 員 独立行政法人産業技術総合研究所 志 村 洋 文 産学官連携部門
コーディネータ
委 員 東北大学 中 島 一 郎 未来科学技術共同研究センター
センター長
委 員 東京工業大学大学院 廣 田 薫 総合理工学研究科
教授
委 員 東京大学大学院 藤 岡 健 彦 工学系研究科
助教授
委 員 東京大学大学院 大 和 裕 幸 新領域創成科学研究科
教授
また、(財)無人宇宙実験システム研究開発機構内に置かれた「マイクロ波技術委員 会」としては、下記の 5 名の先生方が委員となり、技術支援、設計レビュー、その他の 作業をした。
氏 名 所 属 篠原 真毅
(委員長)
京都大学 生存圏研究所 助教授
佐々木 進 宇宙航空研究開発機構 宇宙科学研究本部 宇宙情報・エネルギ工学研究 系教授
田中 孝治
宇宙航空研究開発機構 宇宙科学研究本部 宇宙情報・エネルギ工学研究 系助教授
久田 安正 宇宙航空研究開発機構 総合技術研究本部 高度ミッション研究センター 主任開発部員
藤野 義之 独立行政法人情報通信研究機構 鹿島宇宙通信研究センター モバイル衛 星通信グループ主任研究員
3. スタディの内容
スタディは以下の 5 項目について行った。項目毎に本節 1 章-5 章にまとめている。
(1) 作業用ロボットに対する無線送電システムの適用検討
H17 年度の適用検討結果および今年度試作試験結果を踏まえて空中作業用ロボッ ト(監視用無人小型飛行機)への無線送電システムの適用検討を行った。
(2) マクロ波送電系アレイおよび電源の設計・試作・試験
120W 級 32 素子のマイクロ波電力送電系アレイとアレイに電気エネルギーを供給 する電源の設計・試作・試験を実施した。
(3) 受電系レクテナアレイの設計・試作・試験
平成 17 年度の試作成果を反映し効率などを改善した受電系レクテナアレイの設 計・試作・試験を実施した。
(4) 受電系給電制御部の設計・試作・試験
負荷の必要電力の変化にかかわらず一定電圧でレクテナからの電力を受け、効率 の良い電力供給を行うことのできる受電系給電制御部の設計・試作・試験を実施し た。受電系レクテナアレイとの組み合わせ試験も実施した。
(5) システム設計(総合試験準備、試験)
作業用ロボットに対する送受電システム、通信システムの評価を行うために、受 電系に接続する負荷および負荷レベルを通信で制御する総合試験系の設計および 準備を行い、模型ローバの無線送電走行実証試験を実施した。
(6) 送電系 MMIC 開発
超軽量・小型マイクロ波増幅回路の試作・評価を行い、将来の大規模マイクロ波 無線送電実現のための基礎データを得た。
第 1 章 作業用ロボットに対する無線送電システムの適用検討
1,1 目的
作業用ロボットに対するマイクロ波無線送電システムによる電力供給の適用例とし て災害等監視用無人小型飛行機への適用を昨年度の検討結果を踏まえてその活動範囲 を向上させるための概念検討を実施する。1-1)
1.2 無人小型飛行機に対する電力伝送
近年、欧米やアジア諸国では、大学を中心として無人小型飛行機の研究・開発が盛ん になってきている。これらは Unmanned Air Vehicle(以下 UAV)、Micro Aerial Vehicle(以 下 MAV)と呼ばれている。1-2)
特に小型の MAV においては、小型プロセッサや MEMS を使った小型慣性センサ、小型 GPS 受信機等を使った軽量化が実現されている。1-3)1-4)
特に長時間の運用を配慮した場合に課題になるのが、電力の確保である。通常のバッ テリの場合は必要な飛行時間とバッテリの大きさは比例し、逆にバッテリの重量を受け 入れるためには更なる重量の制約が発生する。このためマイクロ波を利用した MAV への エネルギ伝送が研究されている。1-5)
1.2.1 旋回飛行小型無人飛行機
無人小型飛行機での災害監視を想定して地上の発電機付車両からマイクロ波を上空 の小型無人飛行機に送電し、無人小型飛行機は受電したエネルギにより一定高度で定常 旋回を行い周りの状況を観測する方式(図 1.2-1)について、昨年度実施した概念検討 概要は次のとおりである。
(1) 旋回中に小型飛行機はバンク角を取ることから、送電アンテナに対してバンク角 をとらない場合と比較して、送電されるマイクロ波を避ける方向に傾けることになる。
また高度が低い場合には、同じ旋回半径であっても地上からの角度は浅くなりビーム伝 送効率はともに低下する(図 1.2-2)。検討では速度 10m/s を想定している。
飛行高度 200m 以上では、バンク角 15 度程度でマイクロ波エネルギを小型飛行機の直 下から受ける場合の 90%程度は受電できる幾何学的な関係が維持され、必要な電力を地 上から送電できれば、小型飛行機は常に同じ高度で継続的に状況の観測等が可能となる。
ンサ等用電力により決まり、地上からのマイクロ波を機体翼下面に実装したレクテナで 受電する小型無人飛行機の質量と必要電力およびマイクロ波電力密度との関係を図 1.2-4 に示す。
検討の前提とした機体重量と翼幅(翼面積)の関係を図 1.2-3 に示す。1-6).
図に示すように、ある重量に対し最大翼スパンをとるラインにのる飛行機を限界モデル とし、実例のあるラインを K モデルとした。
機体の必要電力は翼下面全面をレクテナとしていることから、機体重量増加に対し必 要電力が増加しても、ほぼ一定電力密度が確保できればよく、図 1.2-4 に示すように 25〜40W/m2程度である。
(3) 図 1.2-5 に地上送電アンテナ直径を 1.5m および 3m、送電電力を1kW に設定した ときの高度と電力密度の関係を示す。
3m のアンテナ径を持つか、1.5m のアンテナ径の場合には送電電力を 1kW より大きく することにより、必要電力密度のマイクロ波を送ることができる。
8
高度(m)
φ:バンク角
1 10 100
0.01 0.1 1 10
質量(kg)
電力(W)、電力密度(w/m2)
P(k)
P/S(k) P(low) P/S(low)
必要電力
電力密度
レクテナ効率:85%
限界モデル Kモデル
10 100 1000
1 10 100
0.01 0.1 1 10
質量(kg)
電力(W)、電力密度(w/m2)
P(k)
P/S(k) P(low) P/S(low)
必要電力
電力密度
レクテナ効率:85%
限界モデル Kモデル
10 100 1000
Kモデル
限界モデル Kモデル
限界モデル
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 5 10 15 20 25 30 35
バンク角度(度)
効率
50 80 128 205 328 524 839 1342
図 1.2-2 旋回による受電効率低下 図 1.2-1 無線送電小型無人飛行機
MAV
送電アンテナ 発電機
φ L
Rc:旋回回転半径(m)
θ ε θ φ= +
ビーム入射角 揚力
cos Fz=L φ
sin Fy=L φ
無線送電アンテナ
MAV
送電アンテナ 発電機
MAV
送電アンテナ 発電機
φ L
Rc:旋回回転半径(m)
θ ε θ φ= +
ビーム入射角 揚力
cos Fz=L φ
sin Fy=L φ
無線送電アンテナ
小型無人飛行機 (MAV)
送電アンテナ径1.5mの場合の電力密度分布(出力1KW)
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 2010
20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250
9-10 8-9 7-8 6-7 5-6 4-5 3-4 2-3 1-2 0-1
クロスレンジ(m)
電力密度 x10w/m2 距離(m)
送電アンテナ径1.5mの場合の電力密度分布(出力1KW)送電アンテナ径1.5mの場合の電力密度分布(出力1KW)
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 2010
20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250
9-10 8-9 7-8 6-7 5-6 4-5 3-4 2-3 1-2 0-1
クロスレンジ(m)
電力密度 x10w/m2 距離(m)
送電アンテナ径1.5mの場合の電力密度分布(出力1KW)
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 2010
20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250
9-10 8-9 7-8 6-7 5-6 4-5 3-4 2-3 1-2 0-1
クロスレンジ(m)
電力密度 x10w/m2 距離(m)
送電アンテナ径1.5mの場合の電力密度分布(出力1KW)
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 2010
20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 260 270 280 290 300
電力密度
(mw/cm2)
クロスレンジ(m)
距離(m)
9-10 8-9 7-8 6-7 5-6 4-5 3-4 2-3 1-2 0-1
送電アンテナ口径3mの場合の電力密度(出力1KW) 送電アンテナ径3.0mの場合の電力密度分布(出力1KW)
距離(m)
電力密度 x10w/m2
クロスレンジ(m)
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12 14 16 18 2010
20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250 260 270 280 290 300
電力密度
(mw/cm2)
クロスレンジ(m)
距離(m)
9-10 8-9 7-8 6-7 5-6 4-5 3-4 2-3 1-2 0-1
送電アンテナ口径3mの場合の電力密度(出力1KW) 送電アンテナ径3.0mの場合の電力密度分布(出力1KW)
距離(m)
電力密度 x10w/m2
クロスレンジ(m)
送電アンテナ口径3mの場合の電力密度(出力1KW) 送電アンテナ径3.0mの場合の電力密度分布(出力1KW)
距離(m)
電力密度 x10w/m2
クロスレンジ(m)
図 1.2-5 送電アンテナ口径と電力密度
監視用無人小型飛行機への送電システム
図 1.2-6 監視用無人小型飛行機への送電システム 1.2.2 蓄電池併用型無人小型飛行機
昨年度検討した前項の旋回飛行小型無人飛行機に対して、今年度実施したマイクロ波 送電試験の結果を反映して、蓄電池併用型無人小型飛行機の検討を行った。これは、地 上からの送電装置(アンテナ、送電部および発動機を所持した自動式/牽引式送電装置)
により、上空の無人飛行機に対して無線送電を行い、旋回中に蓄電池への充電を実施す る。必要な時間旋回しながら滞
空した後、観測が必要な領域へ 飛行し、観測を行うものである。
想定する観測のシナリオは、あ る程度距離の離れた観測地域 へ、無人小型飛行機が飛行し、
そこで観測を行った後、送電装 置上空に戻り、そこで旋回を行 い充電完了後、再度飛行するも のである。(図 1.2-6 参照)
図 1.2-7 にシステムのブロック図を示す。
空中作業用ロボットブロック構成 地上送電装置ブロック構成
MAV
送電アンテナ 発電機
MAV
送電アンテナ 発電機
受電部
駆動系
通信系 給電制御部
H18試作
H18試作
H18試作
送電部
機体構造系 バッテリ
バッ テリ 充 電 量
送電/充電飛しょう期間 通信系
電源系
送電部駆動系
(機械系又は電子系)
送電系 制御装置
電力
エネルギー伝送 通信
:H18確認済み
通信:H18確認
自由飛しょう 放電期間
放電期間
空中作業用ロボットブロック構成 地上送電装置ブロック構成
MAV
送電アンテナ 発電機
MAV
送電アンテナ 発電機
受電部
駆動系
通信系 給電制御部
H18試作
H18試作
H18試作
送電部
機体構造系 バッテリ
バッ テリ 充 電 量
送電/充電飛しょう期間 通信系
電源系
送電部駆動系
(機械系又は電子系)
送電系 制御装置
電力
エネルギー伝送 通信
:H18確認済み
通信:H18確認
自由飛しょう 放電期間
放電期間 GPS
電力レベル 位置情報、
観測情報 飛行制御系
観測系
指令系
図 1.2-7 システムブロック図
図 1.2-7 における空中作業用ロボットブロックにおいては、今年度の試作で確認した 受電部のレクテナにおいて無線送電エネルギーを受電し、電力に変換する。給電制御部 においては、受電部の安定な動作を保障する電圧を確保するように動作する。
受電エネルギーは駆動系、内部電子機器、通信機、観測系、飛行制御系とともに、蓄 電池に蓄えられる。蓄電池は、マイクロ波送電を受けられない箇所の飛行における電源 供給および給電制御部の定常的な電力供給を行う。
無人飛行機側では、GPS により正確な自機位置を把握し、目的地への自律的誘導およ び地上送電設備からのビーム制御の補助とする。
地上の送電装置側では、無人飛行機の場所を確認し、相対的な角度関係より送電アン テナの指向制御と、相対的な距離より送電電力の制御を行う。これにより、電力送電に 必要な電力を無人飛行機側で確保することができる。
以下にシステム構成例を示す。
平成 17 年度に検討した無人小型飛行機に電動模型飛行機に使用されるリチウムポリ マバッテリー(Advanced Energy 社、TP3200-2S: 7.4V、32Ah、146g)と同等品を搭 載することを前提とする。
パラメータの飛行機体重量とバッテリの関係は以下とする。
1.3kg の機体には、このバッテリを搭載し、それ以外のものには同じ質量密度、電力 密度のバッテリを搭載するものとする。
バッテリ容量@W kg(機体重量)= 32000mAh*(W/1.3)
バッテリ質量@W kg(機体重量)=146g*(W/1.3)
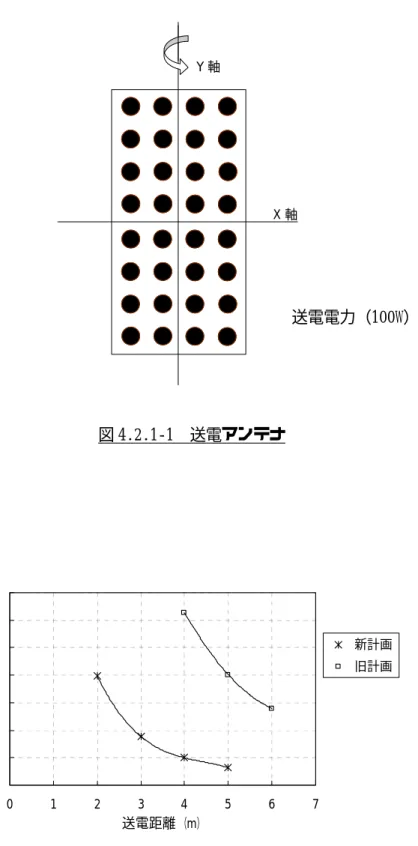
送電側電力密度は、250W/㎡とする。これは、定常飛行を支援するシステムを前提と した 1.2-1 項に示した平成 17 年度検討における電力密度の約 10 倍であり、余剰電力で 充電するものである。充電の効率をηとして、横軸に無人飛行機質量をとると、充電に 必要な時間は、図 1.2-8 に示すように約 1 分半程度から 3 分程度になる。(標準として の効率η=0.8 の場合に、1.3kg の無人飛行機で約 2 分となる。)
無人飛行機は、10 分間 10m/s で飛行することで、往復 6km(片道 3km)の飛行を実現 することができる。飛行に必要な電力等は、平成 17 年度の検討を基にした。
エネルギー送電による飛しょう
0 0.5 1 1.5 2 2.5 3 3.5
0.01 0.1 1 10
飛行機質量(kg)
充電に必要な飛行時間(分)
η=0.9 η=0.8 η=0.7 η=0.6
図 1.2-8 無人飛行機質量と充電に必要な時間
第 2 章 システム設計
2.1 開発の目的とねらい
マイクロ波伝送を無線動力システムに応用するための研究開発を行う。本研究開発を 通じ無線送電技術の産業応用の可能性を明らかにするとともに、宇宙太陽発電衛星
(SSPS)の中枢技術であるマイクロ波送電システム技術の新たな展開を図る。
本研究で目指す主要な新技術の内容は、
(1) 半導体を用いた超軽量マイクロ波増幅システム技術(50g/W クラス目標)
(2) レクテナアレイ出力の変動負荷に対する電力利用技術 である。
また、
(3) 100W級の電力伝送用キャリアに 10mW 級(-40 dB)の通信情報を併用する技術(電力 送電を情報通信に干渉させないための技術)
についても基礎的なデータを取得し検討を行う。
無線動力システムとして図 2.1.1 に示す電動ローバ(4W 駆動タイプ)を検討の対象 とする。
図 2.1.1 無線動力システムとして使用する電動ローバ
これらの技術開発は、SPS 技術開発ロードマップ上以下の意義を持つ。
(1) SPS では輸送コストの観点から軽量小型(特に電力当たりの重量 g/W の値が小さい)
の送電システムが必須である。従来半導体では数百 g/W、6 x 10-3 m3/W のレベル(USEF 試作実績)であったが本研究で 50g/W、1 x 10-3 m3/W レベルまで技術を引き上げる。平 成 16 年度の USEF 試作から本研究計画を経て実証 SPS、実用 SPS に至る道筋を図 2.1.2 に示す。
(2) 太陽電池に類似した出力特性を持つレクテナから変動負荷に対し最大限の電力を 取り出すための技術を開拓する。レクテナ素子としての電力効率向上の研究はこれまで 多くなされてきたが、アレイとしての高効率電力供給技術の研究はこれまで殆どなされ
1 10 100 1000 10000
単位電力当たりの重量(g/W)
平成16年度試作
平成17,18年度試作
実証SPS
実用SPS
ていない。
(3) SPS ではビーム制御のため SPS からの電力伝送と地上からの誘導電波による情報の フィードバックループの構成が必須である。100W 級電力伝送と 10mW 級通信情報の併用
(電力キャリアに対し-40dB)により電力伝送を通信に干渉させないための技術を検討 する。当初電力伝送キャリアそのものに情報をのせて共存させることを構想したが、開 発要素が大きいため、本計画では電力伝送キャリアと情報回線は周波数を分離して干渉 の程度を検討し、今後の併用技術についての技術的な指針を得ることを目指す。
表 2.1.1 にマイクロ波送電技術の現状と本研究での目標を示す。
図 2.1.2 平成 17、18 年度試作で目指すマイクロ波アンプの単位電力当たりの重量
(平成 16 年度 USEF 試作結果および実証 SPS、実用 SPS での目標との関係)
表 2.1.1 マイクロ波送電技術の現状と本研究での目標
主要事項 技術現状 本研究での目標
送電アンプ軽量化
半導体では 100〜1000g/W 電子管では 40〜100g/W
半導体で 50g/W
送電アンプ小容積化 6 x 10-3 m3/W 1 x 10-3 m3/W
送電アンプ高効率化
半導体で 23%(USEF 実績)、電子管で 60%
以上程度 半導体 40%以上目標
ビーム形成・方向制御
パイロット信号によるレトロ方式で 4 ビ ット程度まで
ビーム制御は行わないが、
レトロ方式の制御の前提と なる大電力電力伝送と微小 電力信号の共存技術の検討
レクテナ高効率化
100W/m2程度では素子単体で 85%程度ま で達成
低電力密度の場合の高効率化に課題
稠密配列によるアレイ受信 電力の向上
レクテナ電力利用
未開拓の分野
電力密度の空間分布のある場合のアレ イ動作に課題
アレイと実負荷との電力インタフェー ス(負荷変動も含む)に課題
薄型・軽量型レクテナアレ イの実現
アレイと変動する負荷との 高効率電力インタフェース 技術の確立
2.2 システム仕様・構成 2.2.1 システム仕様
マイクロ波無線電力により、電力ローバの駆動を行う。
システム電力 300W
送電マイクロ波 5.8GHz, 直線偏波、100W 出力(最大 128W)
送電距離 送電アンテナ面前方約 2〜3m
ローバ追尾 送電アンテナは回転して受電アンテナを追尾する、
追尾回転角範囲±40°
アンテナ照射電力密度 127W/m2(典型値)
無線ローバの移動速度 0.03〜0.06m/s 無線ローバ駆動電力 1.3〜4W 制御・モニタインタフェース
微弱無線式 RS-232C 全二重通信ユニット 無線ローバ制御 光学式ライントレース方式
モニタ 電源部とローバとを独立のデータロガーで記録 運用モード バッテリアシストモード
典型的な運用 左右(円弧)・前後への移動を繰り返す
デモンストレーションシナリオ例
送電ステーションを中心とした円周上でローバを移動させることにより送電 アンテナとレクテナを正対させる。図 2.2-1 にデモンストレーションの概念図
を示す。
バッテリアシストモードで図 2.2-2 に示すように、199W/m2(2m) と 88W/m2
(3m)のエネルギ密度の間の領域を決められた経路に沿って走行する。
ローバは、①送電方向に直角方向に半径 3m の円弧状に左右に往復移動、②同様 に半径 2m、③送電方向に対して前後往復移動、および④半径 2m と半径 3m の円弧 を遷移する経路を走行する。
図 2.2-1 デモンストレーションの概念(例)
図 2.2-2 ローバの移動範囲
199W/m2 88W/m2
199W/m2 88W/m2
送電パネル
指令制御装置 マイクロ波無線送電
受電パネル
指令通信系 作業用ロボット模擬(電動移動台)
電源部
送電パネル
指令制御装置 マイクロ波無線送電
受電パネル
指令通信系 作業用ロボット模擬(電動移動台)
電源部
2.2.2 システム構成
図 2.2-3 にシステム構成図を示す。
(1) 送電ステーション
a. 電源部:100VAC 商用電力を DC 電力に変換して、制御・モニタ部、通信部、マイク ロ波送電部に配電する。
b. 制御・モニタ部:送電ステーションの制御と無線ローバの制御を行う。また無線ロ ーバの動作ステータスを表示する。無線ローバの制御と動作ステータス表示はパソ コンで行う。
c. 通信部:微弱無線式 RS232-C 全二重通信ユニットアクセスポイント(周波数は 262
〜269MHz, 314〜321MHz)
d. マイクロ波送電部:アンテナ送電面を回転制御し受電アンテナを自動追尾して無線 ローバの受電アンテナ方向へマイクロ波電力を送電する。
(2) 無線ローバ
a. マイクロ波受電部:送電ステーションからのマイクロ波電力を受電する。
電力処理部:レクテナ出力を処理して、駆動部に必要な電力を配電する。蓄電系を 経由するモード(バッテリアシストモード)を持つ。
b. 通信部:微弱無線式 RS232-C 全二重通信ユニット
c. 駆動部:電力処理部からの電力を得て送電ステーションからの駆動コマンドに従っ て駆動する。
図 2.2-3 システムブロック図
2.3 サブシステム仕様 2.3.1 送電ステーション (1) 電源部
AC 入力 100V400W
DC 出力 マイクロ波回路 12V 300W 制御・モニタ部 TBD 追尾機構 TBD
(2) 制御・モニタ部
a. 送電ステーション制御項目
・主電源スイッチ(DC 電源とファンへの AC 入力)
・ゲートバイアス電源
・ドレインバイアス電源
・発振器電源
b. 送電ステーションモニタ項目
・DC 電源出力電流(その1)
・DC 電源出力電流(その2)
・アンプ表面温度
c. ローバ制御(手動スイッチで制御)
・給電部とインタフェース回路の接続
・バッテリと給電制御部との接続(給電制御部への電源 ON/OFF)
・マイコンへの電源 ON/OFF
・ローバ起動/停止
d. ローバ制御(無線コマンドで制御)
・ローバ起動/停止
e. ローバ制御(H8 マイコンで制御)
・ローバ起動/停止:マニュアルスイッチまたは無線コマンドを受けて駆動サーボ ドライバへの制御信号を出力
・経路追従:光学センサにより路面黒テープのエッジを検出し、追従するようにス テアリングサーボへの制御信号を出力
・停止検出:リミットスイッチまたは、光学センサ全黒または全白出力信号を検出 したときに、停止・反転ロジックが起動
f. モニタ項目(ローバ上のデータロガー)(送電部用データロガー)
・レクテナ電圧 1
・レクテナ電圧 2
・レクテナ電圧 3
・レクテナ電圧 4
・アレイ出力電圧
・給電電圧
・給電電流
・バッテリ電流
g. モニタ項目(送電部用データロガー)
・電源出力電流 1
・電源出力電流 2
・電源出力電流 3
(3) 通信部
市販の微弱無線式 RS232-C 全二重通信ユニット(262〜269MHz, 314〜321MHz)を使用す る。
微弱無線式 RS232-C 全二重通信ユニットの例((株)ウェルパイン) (図 2.3-1)
図 2.3-1 RS232C 無線通信機器(P203H/WP-203L)
P203H/WP-203L の主な仕様(http://www.wellpine.co.jp/products/imagrs2/wp203.pdf) RS-232C インタフェース
受信方式 スーパーヘテロダイン 送信出力 3m/500uV 以下
送受信周波数チャンネル 16CH
送信周波数 H TYPE 314〜321MHz L TYPE 262〜269MHz 受信周波数 H TYPE 262〜269MHz L TYPE 314〜321MHz 符号標準感度 4uV 以下
通過帯域幅 200kHz 以上(-6dB) 変調速度 110bps〜115.2kbps 電波形式 F2D
電源電圧 6V 以上 消費電流 65mA 以下 空中線インピーダンス 公称 50Ω
信号入出力端子 RS-232C 9Pin D-SUB オス/メス 外形寸法 90x55x15 mm
動作保証温度範囲 0〜40℃
(4) マイクロ波送電部
送電系の基本構成を図 2.3-2 に示す。
周波数 5.8GHz、直線偏波(送受電の偏波面を±20°以内に合 わせる)
素子数 4×4 素子アレイ×2 枚(32 素子)。4×4 アレイは上下に並 べて配置する。
アンテナ利得(1 パッチ) 7dBi
アレイアンテナ利得 20dBi(16 素子アレイ) 素子間隔 3.2cm(0.62λ)
アンテナサイズ 12.8cmx25.6cm
1 素子あたりの出力 3.2W(標準)、4W(最大)
素子単体アンプ総合利得 30dB DC-RF 変換効率 50%
マイクロ波総出力 100W(正確には 102.4W) 消費電力 300W
排熱 ファンによる強制空冷(約 200W の排熱)
送電電力密度 199W/m2 at 2m、88.4W/m2 at 3m、49.4W/m2 at 4m 簡易式 p(W/ m2)=795/r2 (p:電力密度、r:距離)
図 2.3-3 に送電アンテナから 2m の位置でのマイクロ波密度 分布を示す。
ローバ追尾 市販品の回転追尾装置を流用、回転角±40°、
追尾速度 0.7°/sec
図 2.3-4 に市販の小型追尾装置の一例を示す。
図 2.3-2 送電系の基本構成
図 2.3-3 マイクロ波電力密度分布(距離 2m)
(a) 自動追尾機構 (b) 追尾駆動機構
図 2.3-4 市販の追尾機構の一例。
(a)は超音波を利用した自動追尾機構。2-2)ただし、この場合の搭載重量は 1kg なので(b)のような駆 動部を準備する。
楽々ツイビー DCモータ 追従円盤 サーボ円盤 アンテナ回転架台
超音波受信器2個
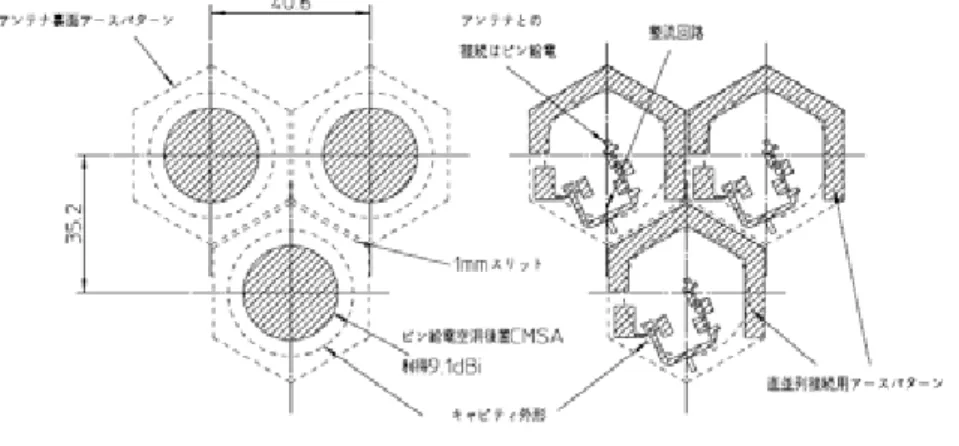
2.3.2 無線ローバ (1) マイクロ波受電部
受電系の構成 レクテナアレイ+給電制御部 レクテナアレイ
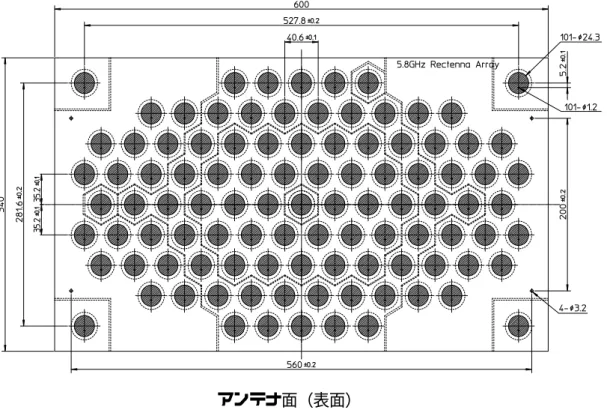
基本周波数 5.8GHz アレイ形状・寸法 600mm×340mm
レクテナ素子数・配置 97 素子 三角形等間隔配置 最大入力電力 最大 500mW/素子
アンテナ 方 式 空洞後置型円形マイクロストリップアンテナ 利 得 9.1dBi
偏 波 直線偏波
整流方式 自己バイアス整流方式
RF/DC 変換効率 70%以上 但し、レクテナ素子レベル 最適負荷および最適入力電力に対して 回路構成 レクテナ素子を 3 ブロック分割、ブロック内 では素子を並列接続、3 つのブロックを直列
接続
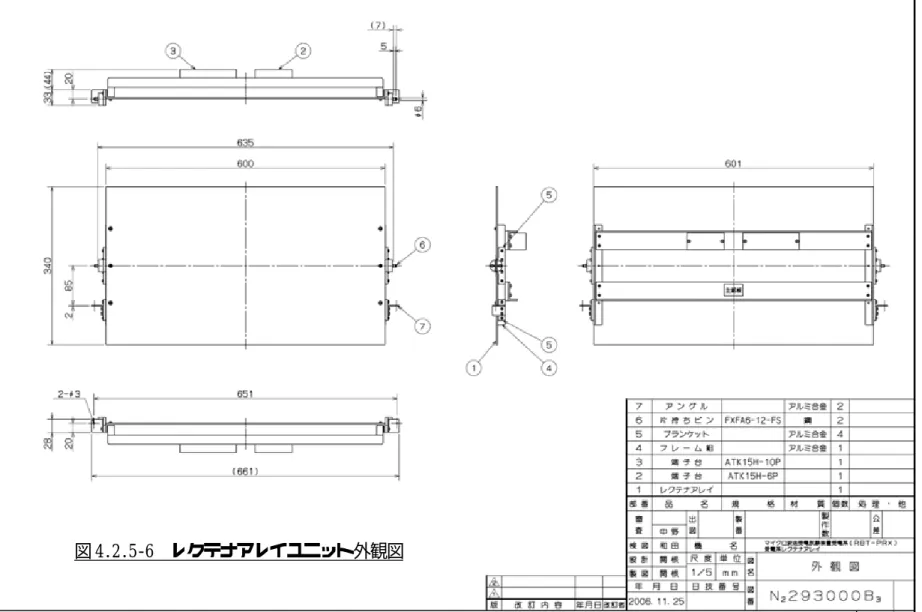
重量 2.5kg 以下 外観形状 図 2.3.-5
出力電力 13.2W(2m), 6.6W(3m)
電力分布を考慮した詳細な値を表 2.3-1 に示す。
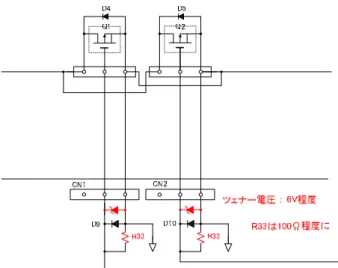
給電制御部
レクテナ出力電圧制御 18V〜24V 間の任意の電圧で一定電圧に制御 回路方式 非絶縁型降圧チョッパリング回路
電力伝達効率 85%以上目標 出力電圧 9V〜13V
表 2.3-1 作業ロボットへの給電電力
送電距離 m 2 3
中心部電力密度 W/m2 199 89 平均入力電力 W 22.8 11.4 レクテナ出力電力 W 15.5 7.8 受電部出力電力 W 13.2 6.6
アンテナ面(表面)
アンテナ面(裏面)
図 2.3-5 受電アンテナの形状
(2) 電力処理部
電力モード バッテリアシストモード 電力制御機器の構成 図 2.3-6
バッテリ名称 小型鉛蓄電池 GS YUASA PE12V0.8
http://www.gs-yuasa.com/gyps/jp/products/denchi/pe̲px.html バッテリ容量 12V, 800mAH
バッテリ重量 360g 効率 80 %
充電電力 標準値 0.2A(0.25C 充電)、最大充電電流 1.2A 充電電圧保護 13V ツェナーダイオード
直接駆動時電力 想定値 4 W(12V0.52A) 初期駆動電流 最大 TBD、TBDms
初期駆動電力をバッテリで供給する場合の内部インピーダンス:TBD オーム以下 重量 マイクロ波受電部と電力処理部を合わせて TBDkg
(3) 通信部
方式 微弱無線式 RS232-C 全二重通信ユニット 電力 電力制御部 12V より給電
TBD W 重量 TBD kg
図 2.3-6 電力制御器
注記 1 : S1,S2 は電流センサ
注記 2 : SW1 は給電スイッチでローバ起動時は常時オン 注記 3 : SW2 は給電制御電源スイッチ
(4) 駆動部
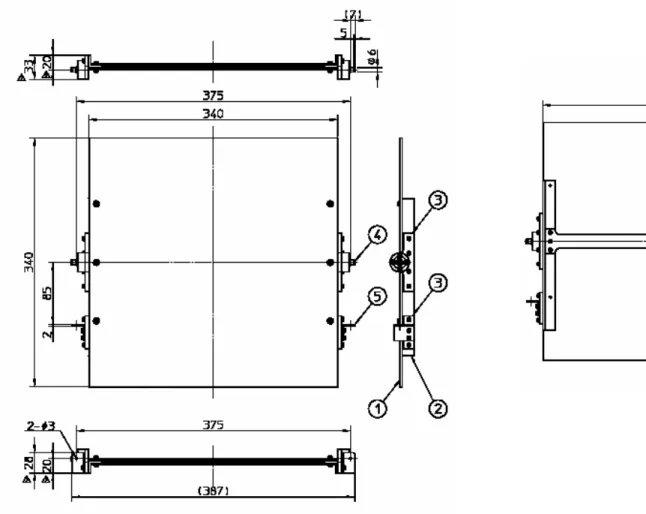
図 2.3-7 にローバの図面を示す。
サイズ 600mm x 400mm x 222mm (LxWxH) 車輪サイズ 直径 126mm
搭載パネル 600×340mm(エンベロープ)
重量 2kg (空車時) 最大荷重 8kg
移動速度 0.04m/sec 消費電力 4W
入力電源 12V
モータ DC モータ(定格 12V)
連続走行 2 時間(制御電源容量の制限)
図 2.3-7 ローバ外観図
2.4 試験仕様 2.4.1 単体試験 (1) 送電ステーション 試験場所:京都大学
試験項目:マイクロ波特性(3次元電力密度プロファイル、規格は節 2.3.1(4))
電力特性(電力フロー、送電ステーション総合効率、規格は節 2.3.1(4))
電気構造特性(特に g/W、cm3/W、規格は表 2.1-1)
温度特性(熱解析との比較)
ビーム追尾特性(範囲、速度、規格は節 2.3.1(4))
(2) 無線ローバ
試験場所:JAXA(ISAS)(または次世代または IA)
試験項目:マイクロ波整流特性(電力密度プロファイルに対する給電出力、規格は節 2.3.2(1))
電力特性(電力フロー、無線ローバ総合効率、規格は節 2.3.2(2))
機械的特性(規格は節 2.3.2(1))
ローバ駆動特性(規格は節 2.3.2(4))
微弱無線性能(ローバ制御性能、モニタ性能、規格は節 2.3.1(2))
2.4.2 システム試験 試験場所:京都大学
試験項目:総合電力特性(電力フロー、総合効率、規格は節 2.2.1)
ローバ制御特性(デモンストレーションシナリオ動作の確認、規格は節 2.2.1 および図 2.2-2)
2.5 開発体制 システム検討
USEF:開発主体
JAXA(ISAS):システム技術とりまとめ 送電ステーション
京大:電源部、制御・モニタ部(マイクロ波送電部用)、マイクロ波送電部 次世代:マイクロ波送電部熱計算、制御・モニタ部(ローバ制御・モニ ター部、追尾部)、通信部、計測システム
無線ローバ
IA:マイクロ波受電部、電力処理部 次世代:通信部、駆動部、計測システム
2.6 開発計画 2.6.1 平成 17 年度 システム設計
送電ステーション設計、設計用試験・試作 無線ローバ設計、マイクロ波受電部試作・試験
2.6.2 平成 18 年度 システム試験
送電ステーション製作・試験 無線ローバ製作・試験
第 3 章 マイクロ波電力送電系アレイおよび電源の設計・試作・試験
3.1 送電部の構成 3.1 .1 構成
本送電部の試作に関して、ハードウェアの全体構成を図 3.1-1 および以下に示す。す なわち
・ パッチアンテナによる平面アンテナ部
・ 各アレイアンテナエレメントの構成要素である 3 段アンプとウィルキンソン電力 分配器等による RF 回路部
・ FET への DC 電圧印加のための電源回路部
・ 4×4 アレイアンテナへの周波数基準信号を増幅しながら電力を分配するアンプ 付分配器
・ RF 回路の発熱を処理する廃熱用冷却ファン
・ それらへ電力を供給する電源部
により構成される。これに加えて、機能により、それぞれサブシステムで次のようにま とめた。
〇1RF 回路ユニット−製作用の組み合わせにより 2 素子アレイ
〇1AIA ユニットアレイ−1RF 回路ユニットを 2 ユニットまとめた 2 次元アレイの 最小単位である 2x2 の 4 素子アレイ
〇1 ユニットプレートアレイ−1AIA ユニットアレイを 4 つまとめた 4×4 の 16 素 子アレイ
とし、マイクロ波信号を分配して各アレイエレメントに供給する構成とした。これ以上 のアレイ構成にする場合は、RF 信号の源から電力を分配することを基本とした。この 概念にしたがって、試作を行った。
図 3.1-1 送電部の構成
3.1.2 送電部の性能
送電部各部の機能は、前項に説明したように、マイクロ波源から、分配し、その段数 が多くなると分配器の出力が低下するため、適切な電力増幅を行い、AIA ユニットまた は RF 回路ユニットに給電し、3 段増幅器(2 段ドライバアンプ+高出力アンプ)を経て、
高出力のマイクロ波をアンテナより放射する。さらに送電部としては、半導体デバイス による増幅器を動作させるための DC 電源の供給を行う電源部を外付けとする構成とし た。図 3.1-2、図 3.1-3 および以下に、機能とともに具体的な構成を示す。
*発振(波源)
(分配)
→ 電力分配器(2 分配)
(増幅)
→ 2 段ドライバアンプ(廃熱構造)
↓
*16 素子アレイ
(増幅)
→ 2 段ドライバアンプ(廃熱構造)
(分配)
→ 電力分配器(2 分配)
(増幅)
→ 2 段ドライバアンプ(廃熱構造)
(分配)
→ 電力分配器(2+2 分配)
↓
*基本 AIA ユニット(電源回路付)
→ 電力分配器(2 分配)
→ 2 段ドライバアンプ(2 段目廃熱機構付折り曲げ回路構造)
→ 高出力アンプ(廃熱機構付折り曲げ回路構造)
→ パッチアンテナ
図 3.1-2 16 素子アレイ(アンプ付分配器+AIA ユニット)の構成
図 3.1-3 機能ブロック図
上記のような構成をもとに、具体的な送電部の性能目標を掲げた。以下の表 3.1-1 に それを示す。
表 3.1-1 マイクロ波電力送電部の主な仕様目標値
項目 仕様(目標値)
周波数 5.8GHz(送電のみ)
送電部の形状 2 次元アクティブ集積アンテナアレイ
機能 増幅・放射
送電アレイアンテナ 4×8=32 素子
(全体)
電源ユニット 商用 100V 使用・外付け
増幅器の形式 多段半導体増幅器 AIA ユニット内アレイア
ンテナ 1 素子あたりの多 段増幅器の総合利得
3 段 20dB
アレイアンテナ 1 素子あ たりの増幅器の出力
4W
(デバイス・回路 部)
DC-RF 変換効率 40%程度
偏波 直線
(アンテナ部)
アンテナ利得 18dB(パッチアンテナ単体 3dB/アレイ 因子 15dB)
アレイアンテナ素子間隔 32mm(0.62λ)
送電部放射出力 100W(合成効率 80%)
アンテナサイズ 256mm×128mm(外部ケースを除く)
総電力 100V 商用電圧使用で 1000W 以下
( 電 源 ユ ニ ッ ト
部) DC 出力 12V・8A / −5V
上記の性能目標のもと、入力からアンテナ入力端までのパワーダイアグラムを、素子毎 の出力として、以下の表 3.1-2 に示す。
表 3.1-2 各素子におけるパワーダイアグラム(目標値)
アンプ付分配器 AIA ユニット
素子 入力
アンプ 2 分配器 アンプ 2 分配器 2 分配器
2 分配器 アンプ 利得 4dBm 12dB −3dB 12dB −3dB −3dB −3dB 20dB 出力電力 16dBm 13dBm 25dBm 22dBm 19dBm 16dBm 36dBm
効率
(目標値)
30% 40% 35%
アンプ級 A-AB A-AB A-AB-A
3.2 設計
3.2.1 AIA 部
AIA 部の最終段は 2 段ドライバアンプと高出力アンプで構成される 3 段アンプである。
以下の図 3.2-1 にその構造を示す。
図 3.2-1 AIA 部 3 段アンプの構造
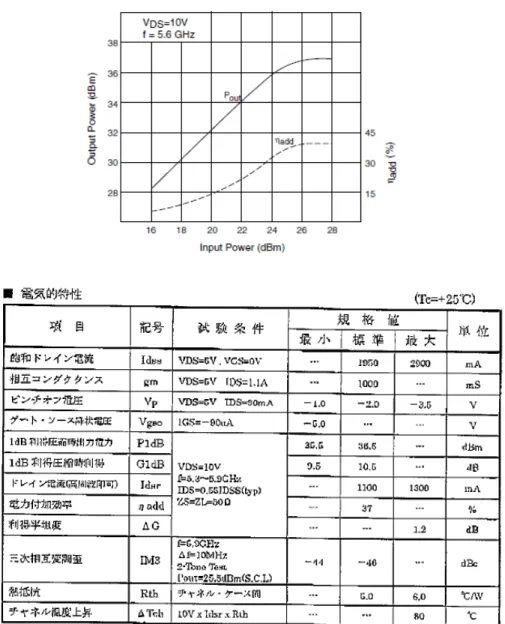
この 3 段アンプの構成要素である FLC167WF と FLM5359−4F/601 の特性を図 3.2-2 およ び図 3.2-3 に示す。
91.5 mm 30
.0 m m
53
59
Vg1 Vd1 Vd2 Vd2 Vg3 Vd3
FLC167WF FLM5359-4F
G D G D G D
1 pF 47 Ohm 1000 pF
スルーホール
図 3.2-2 FLC167WF
図 3.2-3 FLM5359−4F/601
この 3 段アンプを構成要素とした、2 素子アンプアレイを図 3.2-4 に示す。廃熱機構を 組み込むためと厚さを減らし立体構造とするため、2 段ドライバアンプの間に折り曲げ ラインを設けた。
45.0 mm 22.0 mm
64.0 mm
5359-4F
5359-4F
1 pF 47 Ohm 1000 pF スルーホール
SMAコネクタ
(裏面)に接続 100 Ohm
G G D
D
G D G
D
G D
G D
45.0 mm 22.0 mm
64.0 mm
5359-4F 5359-4F
5359-4F 5359-4F
1 pF 47 Ohm 1000 pF スルーホール
SMAコネクタ
(裏面)に接続 100 Ohm
G G D
D
G D G
D
G D
G D
図 3.2-4 2 素子アンプアレイ
なお、この出力端にはパッチアンテナを直結させ、AIA 構造とした。この折り曲げ基板 を用いた 2 素子 AIA アレイの構造を、図 3.2-5 に示す。
図 3.2-5 2 素子 AIA アレイの構造
45mm程度
19mm
廃熱部 HP回路部
アンテナ部
LP回路部
32mm
コネクタ
コネクタ(裏側)
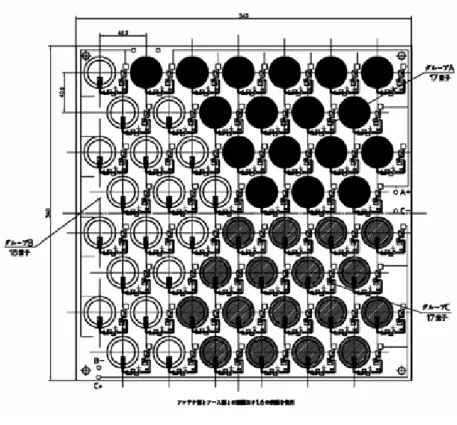
への送電を考慮し、できるだけ効率的に受電するため、高さ方向に 8 列とした図 3.2-6 に示したような 4×8 アレイアンテナの構成とした。
図 3.2-6 32 素子 AIA アレイアンテナ部の構成
図 3.2-6 に示した 32 素子アレイは、4x4 の 16 素子アレイを 2 組縦方向につなげた形と なっている。ただ、この 16 素子アレイは 2 素子 AIA アレイを 8 組接続した構成である。
この 8 組の 2 素子 AIA アレイに給電を行うのに、1 入力 8 出力のアンプ付分配器を接続 する。この分配器の構成を図 3.2-7 に示す。
図 3.2-7 アンプ付分配器
上記の各エレメントによる 32 素子 AIA アレイの全体構成を図 3.2-8 に示す。これには、
アンテナ、3 段アンプ、冷却用ダクト、アンプ付分配器、DC 電源回路、冷却用ファン部 とそれらを入れるケースを含んでいる。さらに、実際には 16 素子アレイに信号を供給 する小型の発振器とアンプ付分配器(小型冷却ファン付)も 32 素子 AIA アレイアンテ ナ部の背後に設置してある。また、冷却用ファン部を除いた 32 素子 AIA アレイアンテ ナ部の容積は、17w×12t×32hcm=6528cm3である。
3.2.2 電源部
上記 32 素子 AIA アレイアンテナ部に加え、この半導体アンプに DC 電力を供給するた めの電源部(外付け)を設計した。図 3.2-9 にその配線図を、またその規格を表 3.2-1 に示す。
図 3.2-9 電源部配線図
表 3.2-1 電源部の規格
電気系 (備考)
入力 出力
商用 100V 12V 50A
−5V
出力は 2 系統
外見
寸法 重量
500×400×100mm 10kg