1
令和元年度 修⼠論⽂
深層学習を⽤いた電源制御⽤フィルタの
⾼速設計システムの構築
指導教員 髙井 伸和 准教授
群⾺⼤学⼤学院 理⼯学部 理⼯学専攻
電⼦情報・数理教育プログラム
髙井研究室
T181D025
久保 友助
2
⽬次
研究背景・⽬的 ··· 4
1.1 研究背景 ··· 4 1.2 研究⽬的 ··· 4 1.3 本論⽂の構成 ··· 6Neural Network によるフィルタ設計 ··· 7
2.1 Neural Network ··· 7 2.1.1 Neural Network の概要 ··· 7 2.1.2 Neural Network の学習 ··· 9 2.1.3 過学習への対処 ··· 10 2.2 深層学習による予測設計モデルの作成 ··· 12 2.2.1 訓練データ作成設定 ··· 12 2.2.2 学習データの作成 ··· 19 2.2.3 伝達関数モデルと電源特性モデルの構築 ··· 19 2.3 ⾼速設計システムの構築 ··· 22第3章
Genetic Algorithm による学習データの作成 ··· 24
3.1 Genetic Algorithm ··· 24 3.1.1 Genetic Algorithm の概要 ··· 24 3.1.2 NN の学習データ作成への応⽤ ··· 24 3.2 学習データの作成⼿順 ··· 253
第4章 実⾏結果 ··· 29
4.1 GA を⽤いた学習データによる学習性能向上実験 ··· 29 4.2 伝達関数モデルと電源特性モデルの予測結果 ··· 33 4.3 ⾼速設計システムの実⾏結果 ··· 39第5章 まとめと今後の課題 ··· 47
5.1 まとめ ··· 47 5.2 今後の課題 ··· 474
研究背景・⽬的
1.1
研究背景
近年電⼦技術の発展やIoTの普及にともなって電⼦機器の⼩型化、低消費電 ⼒化などの⾼性能化が求められている。これら電⼦機器には⼀定の電⼒を安定 して供給するために電源回路の存在が必要不可⽋であり、⼀般的に降圧型DC-DCコンバータが広く利⽤されている。降圧型DC-DCコンバータでは出⼒電圧 を安定に供給するために、出⼒電圧を位相補償フィルタ回路で処理し、フィー ドバックをかけてスイッチを制御する「アナログ制御⽅式」が⼀般的に採⽤さ れている。しかし電源の⽤途によって要求される性能仕様は異なり、それぞれ に応じた設計とシミュレーションを繰り返す必要があるため、設計時間の⻑さ が問題となる。さらに、⾼精度なフィルタ設計には設計者の経験や知識に依存 する部分が多いことから設計者が限られてしまい、電⼦機器の需要に対して設 計者が不⾜している。そこで、プログラムによる⾃動設計システムを構築して 設計者の負担を減らし、かつ⾼速設計が可能な環境を実現することで、問題の 解決を図る。1.2
研究⽬的
本研究は所望の特性から電源制御⽤フィルタの伝達関数を予測するシステム の構築が⽬標である。伝達関数の設計⼿法は極とゼロ点の位置を選定して周波 数特性を計算した後、電源としての性能特性(以下「電源特性」)をシミュレ ーションの繰り返しで調整していく⽅法が主である。この際、設計の簡易化の ために所望の周波数特性から伝達関数を計算するツールが⼀般的に使われる が、その後の電源特性の調整は設計者の勘が頼りとなる。そのため、設計の完 全な効率化のためには電源特性から伝達関数を直接導出する必要があり、その ⼿法の⼀つとして “遺伝的アルゴリズム(GA : Genetic Algorithm)” を⽤いたパラメータ設計⽅法(1)~(2)が提案されている。遺伝的アルゴリズムとは⽣物が進
化する過程で⾏われてきた交叉・突然変異・淘汰を模倣し、世代を経て最適解 を探索する計算⽅法である。GA の活⽤により、伝達関数を所望の電源特性を 満たす形に進化させることができるが、⼤きな問題が2つ挙げられる。1つは
5
パラメータの更新にランダム性が強く、冗⻑な計算やシミュレーションが発⽣ するため、設計の簡易化は可能だが設計時間が⻑くなることである。2つ⽬は 所望の特性が変わるたびに評価式を変えて最適化を再度⾏わなければいけない ことである。そこで、我々は新たにディープラーニングを⽤いて伝達関数を予 測設計する⼿法(3)を提案した。これにより、伝達関数とシミュレーションによ って得られた特性を⼀つのデータとして学習させることで⾃動設計モデルを作 成し、多様な伝達関数の予測が可能となった。また、所要時間は学習データの 作成及び学習のみであり、⼀度学習を⾏えば伝達関数の予測は瞬時に⾏えるた め、設計時間の⼤幅な短縮化が⾒込めた。しかし、学習に関して⼤きな課題が 3つ残った。1 つは未知データに対する予測精度はシミュレーションでしか確 認ができないため、値の調整とシミュレーションの繰り返しが必要となること である。2 つ⽬は、⾃動設計モデルに⼊⼒するデータは次元数が固定でかつ明 確な値を持つ必要があることである。つまり、⼊⼒範囲を指定して予測を⾏う 場合には範囲内で⼊⼒データを⼤量に作成して⾃動設計モデルに⼊⼒し、最も 精度の⾼いデータを抽出する必要がある。そのため、⼊⼒したデータ数分の⼤ 量のシミュレーションが必要となり、設計完了までに時間を要するという問題 がある。3つ⽬は学習に⽤いるデータ範囲がそのまま⼊⼒範囲となるため、デ ータ範囲を広くしたうえで⾼精度な学習を⾏わなければいけないことである。 これらの問題に対して、⼊⼒範囲を指定可能かつ伝達関数と同時に予測精度を 出⼒する⾼速設計システムを構築することで設計の簡易化及び⾼速化を⾏い、 問題解決を図る。 本論⽂では⾼速設計システムの構築基盤として、前述した GA が⽣み出すデ ータの多様性に着⽬して学習データの作成に GA を使⽤する⼿法と、未知デー タに対する予測精度の評価を簡易化するため、学習を 2 段階に分けて⾏う⼿法 を提案する。GA は任意に決めた評価式の値がよくなる⽅向に進化が進むた め、最終的なデータが評価式に依存した極端なものになりやすく、全世代を通 して幅広いデータが作成される。前者の⼿法はこの性質を利⽤して、最適化を 電源特性ごとに複数回⾏うことで範囲の広い学習データを作成する。後者の⼿ 法は伝達関数を出⼒とする学習モデル(以下「伝達関数モデル」)と電源特性 を出⼒とする学習モデル(以下「電源特性モデル」)を共通の学習データで作 成し、連結する⽅法である。これにより、未知データとして⼊⼒した電源特性 から予測設計された伝達関数が⼊⼒特性をどの程度満たすのかをシミュレーシ6
ョンを⾏わずに確認することができる。データの流れとしては所望の電源特性 を伝達関数モデルに⼊⼒すると出⼒として予測伝達関数が得られる。得られた 予測伝達関数を電源特性モデルに⼊⼒すると出⼒として予測電源特性が得られ る。この予測電源特性と最初に⼊⼒した所望の電源特性を⽐較することで、伝 達関数がどの程度正確なものであるのかをシミュレーションせずに確認するこ とができる。この際、予測電源特性と⼊⼒電源特性の⽐較で導出した誤差率を 学習精度の基準として設定し、 “予測誤差率”と呼ぶことにする。これらの⼿法 を⽤いて幅広い⼊⼒範囲の中から所望の特性を⼊⼒すると伝達関数とその予測 誤差率が出⼒される⾼速設計システムを構築し、フィルタ設計を簡易的かつ⾼ 速に⾏える環境を作成する。 提案した GA による学習データ作成⼿法により、データ範囲と学習における データの質の観点で優秀な学習データの作成に成功した。また、GA で作成し た学習データを⽤いて伝達関数モデル及び電源特性モデルを設計し、システム を構築したところ、⼊⼒した電源特性に対して伝達関数と正確な予測誤差率の 出⼒を確認することができた。これにより、シミュレーションを⾏わずに予測 された伝達関数の予測精度を確認しながら設計ができるため、電源特性からフ ィルタ伝達関数の予測をシステム上だけで完結することができ、設計の簡易化 及び設計時間の短縮化が図れる。また、システムによる設計の有⽤性の実証実 験として、構築したシステムによる設計と⼈間による設計を設計時間及び電源 特性の再現性において⽐較したところ、⼈間による設計より優れた結果を確認 することができた。1.3
本論⽂の構成
本論⽂は本章を含めて 5 章で構成される。第 2 章ではニューラルネットワー ク(NN : Neural Network)を⽤いた深層学習の原理から学習モデルの設計⼿ 順及びシステムの設計について述べる。第 3 章では GA の原理及び学習データ 作成への応⽤について述べる。第 4 章では GA で作成したデータの有⽤性の確 認と、作成した学習データを⽤いて学習モデルを 2 種類構築し、それぞれの予 測精度を確認する。また、作成した学習データでモデルの設計、システムの構 築を⾏い、⼈間による設計との⽐較結果を⽰す。第5章では本研究のまとめと 今後の課題を述べる。7
Neural Network
によるフィルタ設計
2.1
Neural Network
2.1.1 Neural Network の概要
NN とは⼈間の脳を構成する神経細胞(ニューロン)の働きを数理モデルに落とし 込んだ⼈⼝ニューロンを層状に回路網化し、複雑な信号処理を可能にする仕組みであ る。ここで信号が⼊⼒される最初の層を⼊⼒層、最終的な処理結果を出⼒する層を出 ⼒層、⼊⼒層と出⼒層を除く中間の層を隠れ層と呼び、⼊⼒層から出⼒層までの⼀⽅ 向のみに情報を伝搬する NN を順伝搬型ニューラルネットワークという。発展型とし て再帰型ニューラルネットワークが存在するが、予測対象を時系列データとする場合 に使われる⼿法であるため、本研究では順伝搬型ニューラルネットワークを採⽤して いる。 NN はユニットと呼ばれる素⼦から構成されており、各層に存在するユニットが層 間で結合している。各ユニットは複数の⼊⼒ 𝑥" 𝑖 = 1,2, … , 𝐼 を受け取ってそれぞれに異 なる重み 𝑤", 𝑗 = 1,2, … 𝐽 を掛け⼀つのバイアス 𝑏, を⾜したものを総⼊⼒ 𝑢, として、活性化 関数と呼ばれる関数 𝑓 をこれに適⽤し出⼒ 𝑧, として処理する。ここで 変数 𝑖 は⼊⼒の数、 変数 𝑗 は⼊⼒を受け取るユニットの数である。以下にユニットが⾏う⼀連の処理の計 算式、模式図を図 2.1 に⽰す。𝑢
,=
𝑤
," 3 "45𝑥
"+ 𝑏
,2.1
𝒛
𝒋= 𝒇 𝒖
𝒋𝟐. 𝟐
これをベクトルと⾏列を⽤いて表記すると以下のようになる。𝐮 = 𝐖𝐱 + 𝐛
2.3
𝐳 = 𝐟 𝐮
2.4
8
図 2.1 ニューラルネットワークの模式図 次に、図 2.1 のネットワークにもう 1 つの層を追加した図 2.2 の構図を考える。情報は左から 右へと伝搬していくためこの順に各層を 𝑙 = 1,2,3 で表し、それぞれ⼊⼒層、隠れ層、出⼒層 としている。層 𝑙 + 1 のユニットの出⼒を 𝒛 𝒍G𝟏 と定義すると1つ下の層 𝑙 のユニットの出 ⼒ 𝒛 𝒍 から以下のように表すことができる。𝐮
𝐥G𝟏= 𝐖
𝐥G𝟏𝐳
𝐥+ 𝐛
𝐥G𝟏2.5
𝐳
𝐥G5= 𝐟 𝐮
KG52.6
上記の計算を⼊⼒側から出⼒側へ繰り返し、情報を伝搬させることでネットワークの最終的 な出⼒ 𝐲 が得られ、この関係は 𝒚 = 𝒚(𝐱) で表すことができる。この関数 𝐲 の中⾝を決定する のが各層間の重み 𝐖(𝐥) と各層のバイアス 𝐛(𝐥) であり、これらすべてを成分に持つベクトルを w と定義する。この w を調整することで様々な関数を表現することができる。このように⼊ ⼒層と出⼒層の間に何層も追加することでデータ間の複雑な関係を関数化する⼿法を深層学習 と呼ぶ。9
図 2.2:多層化したニューラルネットワーク2.1.2
Neural Network の学習
本項では前項で述べた NN の学習⼿順を述べる。初めに、NN への⼊⼒ 𝐱𝐧(𝑛 = 1,2, … , 𝑁)に対する NN の出⼒を 𝐲 𝐱𝐧 |𝐰 とする。ここで、⼊⼒ 𝐱𝐧に対する NN の望ましい出 ⼒を 𝐝𝐧とし、その組み合わせが(𝐱𝐧, 𝐝𝐧) として与えられているとする。この組み合わせの集合 を訓練データという。NN の学習とは前項のパラメータ w を調整することで全ての⼊⼒データ 数 n において出⼒ 𝐲 𝐱𝐧 |𝐰と 𝐝𝐧を近づけることである。この際、𝐝𝐧 と 𝐲(𝐱𝐧)|𝐰 の近さの尺 度を誤差関数で表現する。本研究では回帰分析で値の予測を⾏うため、回帰分析モデルで⼀般的 に⽤いられる誤差関数の⼆乗誤差を⽤いた。⼆乗誤差を⽤いた誤差関数の式を以下に⽰す。E 𝐰 =
𝟏
𝟐
𝐝
𝐧− 𝐲 𝐱
𝐧|
𝐰 𝟐 𝐍 𝐧4𝟏2.7
この E(w) が最も⼩さくなるような w を選択することで⼊⼒と出⼒の間の関数を最適なものx
10
にし、理想的な出⼒に近づけることで予測が可能となる。この E(w) を⼩さくする⽅法として勾 配降下法という⼿法がある。勾配とは∇E ≡
𝜕𝐸
𝜕𝐰
2.8
というベクトルで表され、勾配が負の⽅向に向かうように w を更新し続けることで E(w)を徐々 に⼩さくしてく。ここで更新回数を t とし、更新前の𝑤を𝑤`、更新後を𝑤`G5、𝑤の更新量の⼤ きさを決める定数(学習係数)をϵとすると重みの更新は以下の式で表される。
𝑤
`G5= 𝑤
`− 𝜖∇𝐸
2.9
学習係数ϵが⼗分に⼩さければ、更新回数 t の増加に伴って E(w(t))が減少していくが、実際の 最⼩点ではない局所解に陥った場合、抜けることができない問題がある。原因としては重みの調 整に訓練データを全て使っているためで、これを解決した⼿法に確率的勾配降下法(SGD: stochastic gradient descent)がある。SGD は 𝑤 の更新に⼀部のデータのみをサンプルとし て使⽤し、更新毎に別のサンプルを使⽤することで勾配の更新に多様性を持たせ、局所 解へ陥る可能性を減らす⼿法であり、本研究でもこれを使⽤している。ここで、サンプ ルとして抽出した⼀部のデータのことをミニバッチ、サンプルデータの数をバッチサイ ズと呼び、設定したバッチサイズのサンプルデータを抽出、重みの更新を繰り返して全 訓練データを使⽤し終えると⼀回の学習が終了する。訓練データを全て使⽤した⼀回の 学習をエポック(epoch)という単位で表し、エポックを重ねることで SGD による関 数の最適化が⾏われる。2.1.3
過学習への対処
過学習とは訓練データに学習が適応しすぎてしまい、本来予測を⾏いたい未学習のデータに 対しての予測精度が著しく悪化した状態のことである。本研究では過学習を防ぐためにドロッ プアウト操作と、誤差関数に L2 正則化項の追加をしている。ドロップアウトとは各隠れ層にお いて⼀定数のノードを設定したドロップアウト率に従ってランダムに無効化する⼿法で、イメ ージを図 2.3 に⽰す。11
図 2.3 通常のニューラルネット(左)とドロップアウトを適⽤したニューラルネット(右) ドロップアウトの適⽤によりネットワークの表現度を下げることなく⾃由度のみを制限する ことでデータの特徴を正確につかみ、過学習を防ぐことができる。 L2 正則化の追加とは誤差関数に重みの 2 乗ノルムを加えることで重みに制約を持たせる⼿ 法で、誤差関数及び重みの更新は以下の式で表される。E 𝐰 = E 𝐰 +
𝝀
2
𝐰
𝟐2.10
𝑤
`G5= 𝑤
`− 𝜖(∇𝐸 + 𝜆𝑤
`)
2.11
これにより L2 正則化係数λに従って重み 𝑤 が⼤きくなるほど⾃⾝の減衰量が増加す ることで重みの過剰な増加が防がれるため、未学習のデータを⼊⼒した際の値のズレ を抑えることができる。12
V
i
r
s
r
s
r
L
L
r
C
C
R
V
o
Controller
PWM
ΔD
ΔV
C
sawtooth
V
ref
2.2
深層学習による予測設計モデルの作成
2.2.1 訓練データ作成設定
本研究の⽬的は電源特性から電源制御⽤フィルタの予測設計を⾏うことなので、⼊ ⼒は電源特性、出⼒は制御⽤フィルタである予測モデルを深層学習によって作成す る。そのため、学習に⽤いる訓練データはこれら 2 つの⼤量のデータセットから構成 される必要があり、本項ではデータ作成にあたって前提となる設定を述べる。 制御対象 制御対象の電源は⼀般的に使われている降圧型 DCDC コンバータとし、以下に回路 図と使⽤したパラメータを⽰す。 図 2.4 降圧型 DCDC コンバータの回路図13
表 2.1 DCDC コンバータの素⼦パラメータ 出⼒(電源制御⽤フィルタ) 設計対象の電源制御⽤フィルタは以下の式で表される伝達関数とする。C = 𝐾
𝑠 + 𝑧
5𝑠 + 𝑧
i𝑠 + 𝑝
5𝑠 + 𝑝
i2.12
NN の出⼒は直流ゲインK と極𝑝
1、 𝑝
2 及びゼロ点𝑧
5、 𝑧
i とする。 ⼊⼒(電源特性) ⼊⼒する電源特性は、電源に接続された負荷抵抗の値が変化した際の出⼒電圧変動 を表す“ロードレギュレーション”及び⼊⼒電圧変動時の出⼒電圧変動を表す“ラインレ ギュレーション”で評価される表 2.2 に⽰す項⽬によって構成される。変動は負荷抵抗 値の下降、負荷抵抗値の上昇、⼊⼒電圧値の上昇、⼊⼒電圧値の下降の順番に⾏わ れ、それぞれの変動の際に評価される特性の計算⽅法を以下に⽰す。なお、負荷変動 は図 2.5 に⽰すあらかじめ作成した抵抗変化パルスによって制御し、⼊⼒電圧変動は 10V から 14V をスイッチによる切り替えで再現する。 素⼦ パラメータ⼊⼒電圧 V
i10 ~ 14 [V]
基準電圧 V
ref1 [V]
スイッチの等価直列抵抗 r
s1 [mΩ]
インダクタ L
37.5 [nH]
インダクタの等価直列抵抗 r
L5 [mΩ]
キャパシタ C
3 [mF]
キャパシタの等価直列抵抗 r
C0.5[mΩ]
負荷抵抗 R
0.01 ~ 1 [Ω]
14
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 1 0.2 0.4 0.6 0.8 Time[ms] R[ohm] 表 2.2 電源特性を構成する電源性能評価項⽬ 図 2.5 負荷変動を制御する抵抗パルス電源の状態変化
評価項⽬
負荷抵抗値の下降
出⼒電圧変動のピーク率 [%]
出⼒電圧変動のオーバーシュート率 [%]
出⼒電圧の変動整定時間 [μs]
出⼒電流の変動スルーレート [A/μs]
負荷抵抗値の上昇
出⼒電圧変動のピーク率 [%]
出⼒電圧変動のアンダーシュート率 [%]
出⼒電圧の変動整定時間 [s]
出⼒電流の変動スルーレート [A/μs]
⼊⼒電圧値の上昇
出⼒電圧変動のピーク率 [%]
出⼒電圧の変動整定時間 [μs]
⼊⼒電圧値の下降
出⼒電圧変動のピーク率 [%]
出⼒電圧の変動整定時間 [μs]
15
出⼒電圧変動のピーク率 負荷抵抗値または⼊⼒電圧値の急激な変動によって起きる出⼒電圧の⽴ち上がりの 最⼤値及び⽴ち下がりの最⼩値が基準電圧に対して何パーセント変動しているかをピ ーク率として設定する。 出⼒電圧変動のオーバーシュート率、アンダーシュート率 負荷抵抗値または⼊⼒電圧値の急激な変動によって起きた出⼒電圧の⽴ち上がりを 整定する際に電圧が基準電圧を下回ったとき、基準電圧に対して何パーセント変動し ているかをアンダーシュート率とし、出⼒電圧の⽴ち下がりを整定する際に基準電圧 を上回ったときの変動率をオーバーシュート率として設定する。なお、今回の制御対 象の電源モデルでは⼊⼒電圧の変動時にオーバーシュート及びアンダーシュートは発 ⽣しないため、負荷抵抗値の変動時のみ値を監視する。 出⼒電圧の変動整定時間 負荷抵抗値または⼊⼒電圧値の変動開始時刻から出⼒電圧の変動が基準電圧の± 0.01%以内に収まった時刻までの時間を変動整定時間として設定する。 出⼒電流の変動スルーレート 負荷抵抗値の変動によって起きた電流値の変動時間に対する傾きをスルーレートと して設定する。なお、スルーレートの計算領域は電流値の変動開始時刻から変動の最 ⼤値に到達した時刻までとする。各値の取得例として図 2.5 に出⼒電圧の特性、図 2.6 に出⼒電流の特性を⽰す。16
0.1 0.11 0.12 0.13 0.095 0.105 0.115 0.125 0.135 1 0.94 0.96 0.98 1.02 1.04 0.95 0.97 0.99 1.01 1.03 Time[ms] Vout[V] ピーク率[%] オーバーシュート率[%] 整定時間[s] ±0.1[%] 0.1 0.11 0.12 0.13 0.095 0.105 0.115 0.125 0.135 0 100 20 40 60 80 120 140 Time[ms] Iout[A]スルーレート[A/μs]
図 2.6 出⼒電圧特性のデータ例 図 2.7 出⼒電流特性のデータ例17
これらの電源特性は電源回路の状態が変化した際に現れるものであるため、値の取得 には回路シミュレーションか状態空間シミュレーションが必要となる。回路シミュレ ーションでは実際の回路を模倣するため値の正確性に優れるが、⼀回のシミュレーシ ョンに時間がかかり、⼤量のデータ作成には膨⼤な時間がかかってしまう。⼀⽅で状 態空間シミュレーションでは回路の働きを状態⽅程式に近似して計算するため、回路 シミュレーションより処理時間に優れているので、本研究ではこの⽅法を採⽤してい る。また、電源回路を状態⽅程式に直す際、スイッチの切り替えによる状態変化量を 時間平均で近似する状態平均化法を⽤いた。 状態空間シミュレーションは数値計算ソフトの Scilab に搭載されている Xcos とい うソフトで⾏う。Xcos では回路を状態空間⽅程式に変換したものをブロック化して GUI で操作することができる。以下に図 2.4 で⽰した電源回路の状態⽅程式を⽰す (状態⽅程式の導出過程は省略する)。 ・電源回路の状態⽅程式 インダクタに流れる電流𝑖kとコンデンサにかかる電圧𝑣mを状態変数としたとき𝐱 =
𝑖𝐿 𝑣𝐶2.13
となるため、PWM の時間に対する出⼒を𝐷(𝑡)としたとき状態空間⽅程式は以下のよ うに書ける。𝐱 𝐭 = 𝐀𝐱 𝑡 + 𝐁𝐷 𝑡
𝑉
v= 𝐂𝐱 𝑡
2.14
状態⽅程式内の⾏列は、𝐀 =
−
xyGxzG{x| k−
{ k { m−
{ m} ,𝐁 =
~• k0
, 𝐂 = 𝛼𝑟
m𝛼 (2.15)
で表される。ただし𝛼 =
𝑅
𝑅 + 𝑟
m2.16
とする。導出した状態⽅程式を⽤いて図 2.4 の降圧型 DCDC コンバータをブロック線 図で表現すると図 2.8 となり、作成したブロック線図を Xcos に実装して電源特性シミ ュレーションを⾏う。.
18
Power Stage Controller−
+
Vref (s) Vout (s) 1 s 1s A(1,1) A(1,2) A(2,2) A(2,1) B(1,1) B(2,1) C(1,1) C(1,2) D(s) D(s) Vout (s) vc(s) iL(s) Power Stage Controller C = K (s + z1)(s + z2) (s + p1) (s + p2) 図 2.8 電源回路を状態⽅程式に変換したブロック線図19
2.2.2 学習データの作成
前項で述べた設定を基に学習のためのデータを作成する。ここで、学習に使⽤され る訓練データとは別に、学習の精度確認⽤のテストデータも同時に作成する。また、 訓練データとテストデータを合わせた全てのデータを“学習データ”と呼ぶ。学習デー タの作成⽅法はフィルタ伝達関数のパラメータをランダムに変化させ、その時の電源 特性を取得して NN の出⼒と⼊⼒のデータセットを作り、この作業を必要なデータ数 だけ繰り返す。この際、作成する学習データの中に不安定なフィルタや値が乖離して いるデータが含まれていると学習精度に悪影響をもたらすため、電源とフィルタを接 続した際の特性に以下の制限を設けた(以下「学習データ制限」)。 ・位相余裕が 45 度以上である ・クロスオーバー周波数が 50kHz ~ 200kHz に収まっている ・発振していない ・出⼒電圧の定常値が基準電圧1V の±1%以内に収まっている また、NN の学習は訓練データのみで⾏われるため、NN の⼊⼒に対応する電源特性を 広い範囲で学習データに含めなければ⼊⼒範囲が狭くなってしまう。そのため、フィ ルタ伝達関数のパラメータをランダムに変化させて学習データを作成すると、学習デ ータ制限を受けやすい上に広い範囲で値がとれるかどうかは運次第となってしまうた め、膨⼤な時間を必要とする。そこで質の良い訓練データを効率よく作成するために GA による最適化技術を応⽤する。原理や詳しい作成⽅法については 3 章にて説明す る。2.2.3 伝達関数モデルと電源特性モデルの構築
作成した訓練データをもとに伝達関数モデルと電源特性モデルを構築する。これら のモデルは図 2.9 に⽰す⼿順に沿って作成をする。20
NN
No
No
Yes
Yes
NN
図 2.9 予測モデル設計フロー21
初めに伝達関数モデルを設計する際の⼿順を図 2.9 の設計フローに即して説明す る。 学習データの収集 前項で説明した点に留意しながら学習データを作成する。作成した段階では学習デ ータが学習に最適かどうかの確認ができないため、学習を繰り返し⾏った後に判断・ 修正をする。 ハイパーパラメータの調整・NN の作成 ハイパーパラメータとは NN を構成する際に⼈間が設定する必要のあるパラメータ のことである。設定するパラメータは活性化関数、誤差関数、最適化⽅法、隠れ層の 層数、隠れ層のノード数、学習係数、L2 正則化係数、バッチサイズとする。ハイパー パラメータは学習データと同様に学習精度に⼤きな影響を与えるため、モデルに合わ せた適切な値に調整する必要がある。調整⽅法は、設定したハイパーパラメータで NN を作成した後、学習を繰り返してパラメータの妥当性を判断し、調整を⾏う。 NN の学習・伝達関数の推論 収集した学習データを作成した NN に学習させる。学習には訓練データのみを使⽤ し、学習終了後テストデータから電源特性のみを抽出し NN に⼊⼒する。NN からは 推論結果として伝達関数が出⼒されるので、⼊⼒した電源特性に対応した伝達関数と ⽐較して誤差率を導出し、学習精度を確認する。また、予測された伝達関数から電源 特性を導出し、⼊⼒した電源特性を再現できているかも学習精度の基準の⼀つとす る。研究の最終⽬的は、伝達関数が不明な電源特性を学習済み NN に⼊⼒した際に、 予測された伝達関数が⼊⼒した電源特性を満たしていることなので、学習精度の基準 としては⼊⼒の再現性を重視する。 電源特性モデルの設計は学習データを変換して NN の⼊⼒をフィルタ伝達関数、出 ⼒を電源特性にして学習を⾏う。伝達関数モデルとの差異は学習精度を NN の出⼒で ある電源特性のみで判断することである。理由は電源特性から伝達関数の導出はでき ないため、⼊⼒の再現性を確認することが不可能だからである。22
No Yes No Yes2.3
⾼速設計システムの構築
作成された伝達関数モデルと電源特性モデルからシステムの構築を⾏う。構築するシ ステムは、ユーザーが⼊⼒した電源特性のパラメータから⼊⼒データを作成し、学習済 みの伝達関数モデルに⼊⼒することで伝達関数を予測し、電源特性モデルによってその 予測精度を導出する機能を持つ。以下の図 2.10 に構築するシステムのフローチャート を⽰す。 図 2.10 ⾼速設計システムのフローチャート23
!"#$%&' パラメータ番号 入力値 ① 1.0 3.0 1.0 ② 0.5 0.8 0.1 ③ 0.5 ④ 3.0×10-5 ⑤ 3.0×10-5 ⑥ 3.0×107 ① ② ③ ④ ⑤ ⑥ 1.0 0.5 0.5 3.0×10-5 3.0×10-5 3.0×107 2.0 0.5 0.5 3.0×10-5 3.0×10-5 3.0×107 3.0 0.5 0.5 3.0×10-5 3.0×10-5 3.0×107 1.0 0.6 0.5 3.0×10-5 3.0×10-5 3.0×107 2.0 0.6 0.5 3.0×10-5 3.0×10-5 3.0×107 3.0 0.6 0.5 3.0×10-5 3.0×10-5 3.0×107 1.0 0.7 0.5 3.0×10-5 3.0×10-5 3.0×107 2.0 0.7 0.5 3.0×10-5 3.0×10-5 3.0×107 3.0 0.7 0.5 3.0×10-5 3.0×10-5 3.0×107 1.0 0.8 0.5 3.0×10-5 3.0×10-5 3.0×107 2.0 0.8 0.5 3.0×10-5 3.0×10-5 3.0×107 3.0 0.8 0.5 3.0×10-5 3.0×10-5 3.0×107 ()*+,!"-&' また、電源特性のパラメータを⼊⼒する際には以下の規定を設ける。 1 指定された電源特性のパラメータを全て⼊⼒する 2 電源特性の範囲を指定して伝達関数の予測を⾏う場合、⼊⼒するパラメータを 初期値 最終値 データ幅 とする ⼊⼒された値から⼊⼒データを作成するが、範囲の指定があるパラメータが存在した場 合、設定したデータ幅で初期値から最終値までパラメータを変化させたデータ群を⽣成 し、⼊⼒データとする。以下に⼊⼒するパラメータと作成される⼊⼒データの例を表し た図 2.11 を⽰す。 図 2.11 ⼊⼒パラメータ及び作成される⼊⼒データ例 作成された⼊⼒データで伝達関数の予測と予測誤差率の導出を⾏う。また、範囲指定 のパラメータが存在する場合、伝達関数モデルから出⼒される伝達関数は複数となる ため、予測誤差率の低いデータから順番に 10 データを⾼精度予測データとして抽出す る。その後、予測された伝達関数と予測誤差率をまとめたデータを予測データとして 出⼒し、処理を終了する。24
第3章
Genetic Algorithm
による学習データの作成
3.1
Genetic Algorithm
3.1.1
Genetic Algorithm
の概要
GA とは⽣物の進化の過程を模倣した最適化アルゴリズムである。GA において、最 適化対象の値を“遺伝⼦”、遺伝⼦を持つデータセットを“個体”と呼ぶ。最適化の⽅法 は、最初に⽣成した個体に対して設定した評価式で”評価”を⾏い、評価結果を基に個 体を”淘汰(選択)”した後、”交叉”による個体間での遺伝⼦の⼊れ替えや、 “突然変 異”による特定遺伝⼦の変化を起こし、再び評価を⾏う。この選択、交叉、突然変異、 評価の⼀連の操作を得た個体の集合を次世代に引き継ぎ、世代を重ねることで最適解 に近づけることが可能である。3.1.2
NN の学習データ作成への応⽤
NN の学習には⼤量のデータが必要であり、また NN の予測範囲を狭めないために は作成するデータは多様性を持つものにしなければならない。データの作成⼿法とし て、値をランダムに変動させて学習データ制限を満たしたデータのみを採⽤するのが 最もシンプルな⽅法だが、無駄なシミュレーションが多く、膨⼤な時間を要する。そ こで本研究では GA の過程で⽣成されたデータを NN の学習データとして使⽤するこ とで、学習の予測範囲の向上及びデータ作成の効率化を図っている。GA を実⾏する と、設定した評価式に基づいて初期世代から最終世代に亘って幅広いデータが⽣成さ れるため、データ範囲の観点において学習データの作成法に適している。また、学習 データ制限を満たすデータのみを次世代に引き継ぐ設定にすることで無駄なシミュレ ーションを避けることができ、学習データ作成時間の⼤幅な短縮化が可能である。25
GA
Yes
No
GA
3.2
学習データの作成⼿順
学習データは以下に⽰すデータ作成フローに従って作成を⾏う。 図 3.1 学習データ作成フロー26
Yes
No
27
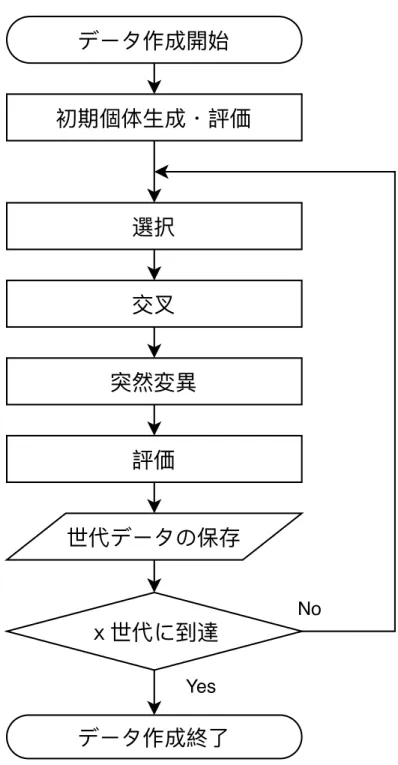
図 3.1 の設計フローに沿ってデータ作成の⼿順を説明する。 最適化特性の選択 学習データは表 2.2 に⽰す電源特性のそれぞれにおいて GA を実⾏し、それぞれの 特性に特化したデータの集合を作成する。これにより、全ての電源特性で多様性を持 った学習データを作成することができ、NN を広範囲に学習させることができる。 GA によるデータ作成、全特性で GA を実⾏ NN の出⼒である直流ゲインK と極𝑝
1、 𝑝
2 及びゼロ点𝑧
5、 𝑧
i のそれぞれを遺 伝⼦として構成された個体に対して GA を適⽤し、データの作成をする。作成⼿順は 図 3.2 の処理フローに沿って説明する。ここで個体数は 100 個体、世代数は 25 世代に 設定した。 初期個体集合の⽣成・評価 最適化対象となる初期個体の⽣成を乱数で⾏い学習データ制限にかけた後、評価 式を基に評価値を算出する。ここで、評価⽅法は「出⼒電流のスルーレート」のみ 評価式を設けずに値をそのまま評価値とし、他の特性は値が⼩さいほど評価値が 100 に近づくように評価式を設定した。 選択 ⽣成された初期個体の集合及び1世代を終えた個体の集合の中で評価値の⾼いデ ータから順に上位 5 個体を抽出し、エリートとして次の世代に引き継ぐ“エリート保 存戦略”を使⽤した。エリート保存戦略により、個体の遺伝⼦操作によって評価値が 下がっても優秀個体を失わずに世代を進めることが可能となる。 また、選出されたエリート個体以外は評価値に⽐例した確率で選択される個体を 決める“ルーレット選択⽅式”を使⽤し、評価値の⾼い個体だけでなく評価値の低い 個体も次世代に引き継ぐことでデータの多様性をもたらしている。 交叉 選択された個体間の遺伝⼦を設定した確率でランダムに交換する。遺伝⼦の交換 は直流ゲインK 同⼠、極 𝑝1 , 𝑝2同⼠、ゼロ点 𝑧5 , 𝑧i同⼠に限定して⾏う。なお、交叉を 起こす確率はすべての最適化において 50%に設定した。28
突然変異 選択された個体の遺伝⼦の⼀部を設定した確率でランダムに変化させる。なお、 突然変異を起こす確率はすべての最適化において 70%に設定した。 評価、世代データの保存 初期個体の評価⽅法と同様の⽅法で個体の評価をする。なお、この時点で学習デ ータ制限を満たしていない個体の評価値は 0 点とし、次世代への個体の引継ぎは⾏ わない。評価が終了した後、評価値が 0 点でない個体とそれぞれの評価値を世代デ ータとして保存し、設定した世代ループ数に到達するまでループを繰り返す。 作成した全データの結合、不要なデータの削除 全特性で最適化が終了後、評価値を取り除いた全世代データを結合し、重複したデ ータ及び値の正負符号が不適切なデータを削除する。データの精査後、残ったデータ を学習データとして NN の学習、テストに使⽤する。29
第4章 実⾏結果
4.1
GA を⽤いた学習データによる学習性能向上実験
電源特性を評価値、伝達関数を遺伝⼦として GA を適⽤することで得られた学習デー タと、ランダムに伝達関数を変化させて作成した学習データの⽐較を⾏い、GA で作成 したデータの有⽤性を⽰す。データの⽐較は各データの最⼩値分の最⼤値を基準として データ範囲を評価し、学習時の学習精度を基準としてデータの質を評価する。ここで、 学習で作成、⽐較するモデルは伝達関数モデルのみとする。なお、データ範囲の評価は ⼊⼒範囲の広さを確認するためなので、NN の⼊⼒に対応する電源特性のみを評価する。 両⽅の条件で学習データを約 1 万データ作成したところ、作成にかかった時間は乱数に よる作成では約 53 時間、GA による作成では約 27 時間となった。また、以下の表 4.1 に2種類の学習データの各電源特性のデータ範囲を⽰す。 表 4.1 学習データのデータ範囲の⽐較 電源の状態 変化 評価項⽬ GA による データ範囲 (max/min) 乱数による データ範囲 (max/min) 負荷抵抗値 の下降 出⼒電圧変動のピーク率 [%] 3.28 2.65 出⼒電圧変動のオーバーシュート率 [%] 3.09×103 1.16×102 出⼒電圧の変動整定時間 [μs] 3.92 3.73 出⼒電流の変動スルーレート [A/μs] 1.55 1.62 負荷抵抗値 の上昇 出⼒電圧変動のピーク率 [%] 3.43 2.85 出⼒電圧変動のアンダーシュート率 [%] 3.43×102 1.51×102 出⼒電圧の変動整定時間 [s] 5.73 5.10 出⼒電流の変動スルーレート [A/μs] 1.66 1.52 ⼊⼒電圧値 の上昇 出⼒電圧変動のピーク率 [%] 4.80 4.31 出⼒電圧の変動整定時間 [μs] 1.28×10 9.65 ⼊⼒電圧値 の下降 出⼒電圧変動のピーク率 [%] 4.82 3.89 出⼒電圧の変動整定時間 [μs] 1.17×10 8.5430
また、作成した学習データで NN の学習を⾏った際のハイパーパラメータを表 4.2 に ⽰す。なお活性化関数、誤差関数、最適化法には回帰分析モデルで⼀般的に使⽤される ReLU 関数、⼆乗誤差、SDG を使⽤した。 表 4.2 学習時のハイパーパラメータ設定 ここで訓練データ中の 1%のデータをバリデーションデータとして取り除き、残りの訓 練データのみで学習を⾏う。1epoch が終了する度に訓練データとバリデーションデー タを NN に⼊⼒してそれぞれの誤差関数を確認し、バリデーションデータの誤差関数 が 10epoch の間減少しなければ学習を終了する。また、学習は両⽅の学習データで 5 回 ずつ⾏い、学習の度にテストデータ及びバリデーションデータをランダムに選択する。 表 4.2 の設定でそれぞれの学習データによる学習を⾏い、学習 1 回の誤差関数の推移を 図 4.1 と図 4.2 に⽰す。 ハイパーパラメータ 学習設定 活性化関数 ReLU 関数 誤差関数 ⼆乗誤差 最適化法 確率的勾配降下法(SGD) 隠れ層の層数 5 層 隠れ層のノード数 200 個 学習係数 0.01 L2 正則化係数 0.0001 ドロップアウト率 20% バッチサイズ 128 テストデータ数 10031
0 20 40 60 80 100 120 140 160 180 0.2 0.4 0.6 0.8 0.1 0.3 0.5 0.7 0.9 epoch loss training_loss validation_loss 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 1 0.2 0.4 0.6 0.8 0.3 0.5 0.7 0.9 epoch loss training_loss validation_loss 図 4.1 訓練データ及びバリデーションデータの誤差関数の推移 (GA の学習データによる学習) 図 4.2 訓練データ及びバリデーションデータの誤差関数の推移 (乱数の学習データによる学習)32
どちらの学習データでも訓練データとバリデーションデータの誤差関数が epoch の 進みに伴って同じスケールで減少しているので、学習は正確に⾏えている。学習済みの 伝達関数予測モデルにテストデータを⼊⼒し、出⼒された予測伝達関数と、予測伝達関 数をシミュレーションにかけて導出される電源特性からテストデータとの誤差率を導 出し、学習精度を確認する。なお、誤差率はそれぞれの学習データによる 5 回の学習の 平均値を⽐較する。以下に 2 種類の学習データによる誤差率の⽐較結果の表を⽰す。 表 4.3 テストデータに対する予測伝達関数の平均誤差率 表 4.4 テストデータに対する予測伝達関数の電源特性の平均誤差率 評価項⽬ GA による 学習データの 誤差率 [%] 乱数による 学習データの 誤差率 [%] 直流ゲインK4.59
5.17
極𝑝
132.0
39.3
極𝑝
230.8
32.3
ゼロ点𝑧
59.42
9.41
ゼロ点𝑧
i17.9
30.3
電源の状態変化 評価項⽬ GA による 学習データの 誤差率 [%] 乱数による 学習データの 誤差率 [%] 負荷抵抗値の下降 出⼒電圧変動のピーク率2.98
3.78
出⼒電圧変動のオーバーシュート率9.74
14.1
出⼒電圧の変動整定時間5.39
5.59
出⼒電流の変動スルーレート1.51
1.44
負荷抵抗値の上昇 出⼒電圧変動のピーク率3.02
3.80
出⼒電圧変動のアンダーシュート率8.91
13.0
出⼒電圧の変動整定時間4.61
5.87
出⼒電流の変動スルーレート1.39
1.21
⼊⼒電圧値の上昇 出⼒電圧変動のピーク率4.27
4.86
出⼒電圧の変動整定時間7.45
6.32
⼊⼒電圧値の下降 出⼒電圧変動のピーク率4.22
4.92
出⼒電圧の変動整定時間8.07
6.41
33
これらの結果より、GA を⽤いて作成した学習データによる学習のほうがデータ範囲 とデータの質においておおよそ優れていることが確認でき、またデータ作成時間も⼤幅 に短縮された。データ範囲の拡張化は GA を使⽤した理由と合致した結果であるが、デ ータの質も改善された理由は GA による最適化過程に起因している。GA で作成した学 習データは伝達関数中の係数の交換、変化を繰り返して電源特性に多様性をもたらして いるため、世代データ間に相関が⽣まれている。そのため、データ間の相関から伝達関 数と電源特性の関係を読み取りやすく、NN による関数近似が⾼精度に⾏われている。 これにより、GA による学習データの有⽤性が証明できたため、以降は GA による学習 データのみを学習データとして扱う。4.2
伝達関数モデルと電源特性モデルの予測結果
4.1 節で作成した GA による学習データに、図 3.1 で⽰した⼿順を繰り返して追加デ ータを作成し、収集した約7万データの学習データで伝達関数モデルと電源特性モデル の設計を⾏う。伝達関数モデル及び電源特性モデルを設計する際のハイパーパラメータ 設定は表 4.2 と同様にするが、電源特性モデルのみノード数を 2 倍にする。これは、電 源特性モデルの⼊⼒は同じ学習データで学習させた伝達関数モデルの出⼒値であるた め、ノード数を多くすることで学習データの依存性を⼤きくしている。これらの設定と 学習データで学習を⾏った際の誤差関数の推移を図 4.3 ~4.4 に⽰す。34
0 20 40 60 80 100 120 140 160 180 200 220 0.2 0.4 0.6 0.1 0.3 0.5 0.7 epoch loss training_loss validation_loss 0 20 40 60 80 100 120 140 160 180 200 220 0.2 0.4 0.1 0.3 0.5 0.15 0.25 0.35 0.45 0.55 epoch loss training_loss validation_loss 図 4.3 訓練データ及びバリデーションデータの誤差関数の推移(伝達関数モデル) 図 4.4 訓練データ及びバリデーションデータの誤差関数の推移(電源特性モデル)35
どちらのモデルにおいても訓練データとバリデーションデータの誤差関数が epoch の進みに伴って同じスケールで減少しているため、学習は正確に⾏えている。学習済み のモデルにテストデータを⼊⼒し、⼊⼒と出⼒の誤差率から予測精度を確認するが、伝 達関数モデルでは出⼒された予測伝達関数をシミュレーションにかけて電源特性を導 出し、⼊⼒した電源特性と⽐較した誤差率の計算も⾏う。以下にパラメータ毎に計算し たテストデータの平均誤差率を⽰す。 表 4.5 テストデータに対する予測伝達関数の誤差率(伝達関数モデル) 表 4.6 テストデータに対するシミュレーション結果の電源特性の誤差率(伝達関数モデル) 評価項⽬ 誤差率 [%] 直流ゲインK3.71
極𝑝
122.3
極𝑝
222.4
ゼロ点𝑧
56.31
ゼロ点𝑧
i11.2
総平均誤差率13.2
電源の状態変化 評価項⽬ 誤差率[%] 負荷抵抗値の下降 出⼒電圧変動のピーク率2.44
出⼒電圧変動のオーバーシュート率14.6
出⼒電圧の変動整定時間3.31
出⼒電流の変動スルーレート1.32
負荷抵抗値の上昇 出⼒電圧変動のピーク率2.50
出⼒電圧変動のアンダーシュート率11.0
出⼒電圧の変動整定時間3.93
出⼒電流の変動スルーレート1.20
⼊⼒電圧値の上昇 出⼒電圧変動のピーク率3.50
出⼒電圧の変動整定時間6.97
⼊⼒電圧値の下降 出⼒電圧変動のピーク率3.46
出⼒電圧の変動整定時間6.24
総平均誤差率5.04
36
表 4.7 テストデータに対する予測電源特性の誤差率(電源特性モデル) これらの結果より、伝達関数モデルでは伝達関数の誤差率の平均が 13.2 %だが、電 源特性の誤差率の平均は 5.04 %と⾼精度な予測ができていることが確認できる。また、 電源特性モデルも平均誤差率が 2.36 %なので予測精度が⾼いと判断できる。次に設計 した 2 つのモデルを接続して、テストデータの電源特性から伝達関数の予測と予測誤差 率の導出を⾏い、実際にシミュレーションをして導出した誤差率と⽐較して予測誤差率 の信頼性を確認する。なお、⽐較する誤差率は全ての電源特性の平均誤差率とし、⽐較 ⽅法のイメージを図 4.4 に⽰す。⽐較結果として、データ毎の平均誤差率を予測誤差率 と実際の誤差率に分けてプロットした分布図を図 4.5 に⽰す。 電源の状態変化 評価項⽬ 誤差率[%] 負荷抵抗値の下降 出⼒電圧変動のピーク率0.64
出⼒電圧変動のオーバーシュート率3.24
出⼒電圧の変動整定時間1.97
出⼒電流の変動スルーレート0.43
負荷抵抗値の上昇 出⼒電圧変動のピーク率0.59
出⼒電圧変動のアンダーシュート率3.03
出⼒電圧の変動整定時間2.56
出⼒電流の変動スルーレート0.39
⼊⼒電圧値の上昇 出⼒電圧変動のピーク率0.83
出⼒電圧の変動整定時間7.35
⼊⼒電圧値の下降 出⼒電圧変動のピーク率0.88
出⼒電圧の変動整定時間6.43
総平均誤差率2.36
37
!!!!!!!!!"#$%
&&'()
*+,-./0
&&'1)
!!!!!!!!!23*+,4!
555"#$%
!"#$%&'()*+,-./6789:6;<
!"#$%01%2 ()*+,-./!!!!!!!!!23*+,4!
555"#$%
3345627289:;<!= >22334?6272@ABC<!=
DE%FG*HIJ
図 4.5 予測誤差率の評価⽅法38
0 10 20 30 40 50 60 70 80 90 100 0 20 40 60 10 30 50 70 図 4.6 予測誤差率と実際の誤差率の分布 図 4.6 の結果より、予測誤差率と実際の誤差率の分布の傾向が⼀致していることが確 認できる。これにより、電源特性モデルがシミュレーションの代⽤となり、テストデー タにおいては予測誤差率が予測精度の基準として信頼できる値だと確認できた。39
4.3
⾼速設計システムの実⾏結果
4.1 節で幅広い学習データの作成に成功し、4.2 節では作成した学習データで⾼精度 な伝達関数モデル及び電源特性モデルの設計が⾏えたため、これらのモデルでシステム を構築し、⼈間による設計とシステムによる設計の⽐較を⾏う。以下の表 4.8 に設計す る電源特性の仕様を⽰す。また、設計するフィルタは学習データ制限を満たさなければ ならないとする。 表 4.8 設計する電源特性の仕様 設計の評価は設計時間と、⽬標値に対する設計値の誤差率で⾏うものとし、設計時間 は設計開始から最終的な設計値をシミュレーションによって導出するまでの時間とす る。 ⼈間による設計では電源回路の開ループ特性から位相余裕とクロスオーバー周波数 を確保しつつ低周波域のゲインが⾼くなるように極とゼロ点を選出し、電源特性を確認 しながらシミュレーションとパラメータの調整を繰り返すことで⽬標値を満たすフィ ルタを作成した。システムによる設計では構築したシステムに表 4.9 に⽰すパラメータ を⼊⼒し、得られた伝達関数の中で最も予測誤差率が低いものを採⽤した。 電源の状態変化 評価項⽬ ⽬標値 負荷抵抗値の下降 出⼒電圧変動のピーク率 [%]-4.0 ~ -2.0
出⼒電圧変動のオーバーシュート率 [%]1.0
出⼒電圧の変動整定時間 [μs]30
出⼒電流の変動スルーレート [A/μs]30
負荷抵抗値の上昇 出⼒電圧変動のピーク率 [%]2.0 ~ 4.0
出⼒電圧変動のアンダーシュート率 [%]-1.0
出⼒電圧の変動整定時間 [s]30
出⼒電流の変動スルーレート [A/μs]30
⼊⼒電圧値の上昇 出⼒電圧変動のピーク率 [%]0.5
出⼒電圧の変動整定時間 [μs]5.0 ~ 10
⼊⼒電圧値の下降 出⼒電圧変動のピーク率 [%]-0.5
出⼒電圧の変動整定時間 [μs]5.0 ~ 10
40
表 4.9 システムに⼊⼒するパラメータ ⼆通りの設計⽅法を実⾏した結果、⼈間による設計では設計時間が 19 分 33 秒、設 計値及び⽬標値に対する誤差率は表 4.10 の結果となり、平均誤差率は 10.4%であった。 また、システムによる設計では設計時間が 1 分 54 秒、設計値及び⽬標値に対する誤差 率は表 4.11 の結果となり、平均誤差率は 8.10%であった。⼈間によって設計されたフ ィルタの伝達関数とシステムによって設計されたフィルタの伝達関数を以下に⽰し、フ ィルタを実装した際の電源回路の開ループボード線図を図 4.7~4.8 に⽰す。また、その 際の出⼒電圧特性及び⽐較結果を図 4.9~4.13 に⽰す。 ⼈間によって設計されたフィルタ伝達関数C =
6.000 𝑠
i+ 1.539×10
„𝑠 + 9.054×10
5…𝑠
i+ 2.166×10
†𝑠 + 4.387×10
‡4.1
システムによって設計されたフィルタ伝達関数C =
4.897 𝑠
i+ 1.245×10
„𝑠 + 7.802×10
5…𝑠
i+ 4.390×10
†𝑠 + 3.323×10
ˆ4.2
電源の状態変化 評価項⽬ ⼊⼒値 負荷抵抗値の下降 出⼒電圧変動のピーク率 [%]-2.0 -4.0 -0.1
出⼒電圧変動のオーバーシュート率 [%]1.0
出⼒電圧の変動整定時間 [μs]30
出⼒電流の変動スルーレート [A/μs]30
負荷抵抗値の上昇 出⼒電圧変動のピーク率 [%]2.0 4.0 0.1
出⼒電圧変動のアンダーシュート率 [%]-1.0
出⼒電圧の変動整定時間 [s]30
出⼒電流の変動スルーレート [A/μs]30
⼊⼒電圧値の上昇 出⼒電圧変動のピーク率 [%]0.5
出⼒電圧の変動整定時間 [μs]5.0 10 1.0
⼊⼒電圧値の下降 出⼒電圧変動のピーク率 [%]-0.5
出⼒電圧の変動整定時間 [μs]5.0 10 1.0
41
表 4.10 ⼈間によるフィルタ設計の設計値及び⽬標値に対する誤差率 表 4.11 システムによるフィルタ設計の設計値及び⽬標値に対する誤差率 電源の状態変化 評価項⽬ ⽬標値 設計値 誤差率[%] 負荷抵抗値の 下降 出⼒電圧変動のピーク率 [%] -4.0 ~ -2.0-2.48
0
出⼒電圧変動のオーバーシュート率 [%] 1.00.91
9.00
出⼒電圧の変動整定時間 [μs] 3028.7
4.33
出⼒電流の変動スルーレート [A/μs] 3038.8
29.3
負荷抵抗値の 上昇 出⼒電圧変動のピーク率 [%] 2.0 ~ 4.02.60
0
出⼒電圧変動のアンダーシュート率 [%] -1.0-0.98
2.00
出⼒電圧の変動整定時間 [s] 3024.2
19.3
出⼒電流の変動スルーレート [A/μs] 30-40.0
33.3
⼊⼒電圧値の 上昇 出⼒電圧変動のピーク率 [%] 0.50.43
14.0
出⼒電圧の変動整定時間 [μs] 5.0 ~ 105.20
0
⼊⼒電圧値の 下降 出⼒電圧変動のピーク率 [%] -0.5-0.43
14.0
出⼒電圧の変動整定時間 [μs] 5.0 ~ 105.50
0
電源の状態変化 評価項⽬ ⽬標値 設計値 誤差率[%] 負荷抵抗値の 下降 出⼒電圧変動のピーク率 [%] -4.0 ~ -2.0-2.95
0
出⼒電圧変動のオーバーシュート率 [%] 1.00.98
2.00
出⼒電圧の変動整定時間 [μs] 3024.8
17.3
出⼒電流の変動スルーレート [A/μs] 3036.7
22.3
負荷抵抗値の 上昇 出⼒電圧変動のピーク率 [%] 2.0 ~ 4.03.02
0
出⼒電圧変動のアンダーシュート率 [%] -1.0-1.13
13.0
出⼒電圧の変動整定時間 [s] 3027.6
8.00
出⼒電流の変動スルーレート [A/μs] 30-38.0
26.7
⼊⼒電圧値の 上昇 出⼒電圧変動のピーク率 [%] 0.50.50
0
出⼒電圧の変動整定時間 [μs] 5.0 ~ 105.32
0
⼊⼒電圧値の 下降 出⼒電圧変動のピーク率 [%] -0.5-0.54
8.00
出⼒電圧の変動整定時間 [μs] 5.0 ~ 105.95
0
42
10−2 10−1 100 101 102 103 104 105 106 107 108 109 1010 0 −100 100 −50 50 10−2 10−1 100 101 102 103 104 105 106 107 108 109 1010 0 −100 −150 −50 10−2 10−1 100 101 102 103 104 105 106 107 108 109 1010 0 −100 −50 50 10−2 10−1 100 101 102 103 104 105 106 107 108 109 1010 0 −100 −150 −50 図 4.7 ⼈間によるフィルタ設計の電源回路の開ループボード線図 図 4.8 システムによるフィルタ設計の電源回路の開ループボード線図43
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 1 0.2 0.4 0.6 0.8 1.2 1.4 Time[ms] Vout[V] 0.1 0.105 0.11 0.115 0.12 0.125 0.13 1 0.96 0.98 0.97 0.99 1.01 0.965 0.975 0.985 0.995 1.005 Time[ms] Vout[V] 図 4.9 出⼒電圧の時間特性の⽐較 図 4.10 図 4.9 中の負荷変動時の出⼒電圧特性44
0.3 0.301 0.302 0.303 0.304 0.305 0.306 0.307 0.308 0.309 0.31 1 1.002 1.004 1.001 1.003 1.005 0.9995 1.0005 1.0015 1.0025 1.0035 1.0045 1.0055 Time[ms] Vout[V] 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 1 000 −400 −200 200 400 600 800 1 200 Time[ms] Iout[A] 図 4.11 図 4.9 中の⼊⼒電圧変動時の出⼒電圧特性 図 4.12 出⼒電流の時間特性の⽐較45
0.1 0.105 0.11 0.115 0 100 −20 20 40 60 80 120 140 160 Time[ms] Iout[A] 図 4.13 図 4.12 中の負荷変動時の出⼒電流特性 電源特性おいて、スルーレートを除いた全てのパラメータは値が⼩さいほどフィルタ の性能が⾼いため、表 4.10 と表 4.11 の結果より⼈間による設計のほうが設計されたフ ィルタの性能は⾼かった。しかし、⽬標値に対する設計値の誤差率及び設計時間はシス テムによる設計のほうが良い結果となったため、システムの使⽤によって設計の簡易化 と⾼速化は可能であることが確認できた。また、システムから出⼒された予測誤差率が 低い 10 データのデータ番号及び予測誤差率を、実際の誤差率が低い 10 データのデー タ番号及び誤差率と⽐較した結果を表 4.12 に⽰す。ここで実際の誤差率と予測誤差率 はデータごとの電源特性全ての誤差率の平均値とする。 表 4.12 予測誤差率と実際の誤差率の低いデータのデータ番号及び誤差率の⽐較 データ番号 (実際の誤差率)123 122 116 117 110 111 104 124 118 103
実際の誤差率[%]14.6 14.8 14.9 15.0 15.6 16.2 16.2 16.3 16.7 17.3
データ番号 (予測誤差率)116 122 109 115 110 103 123 121 117 104
予測誤差率[%]13.0 13.1 13.8 14.0 14.1 14.4 14.8 15.1 15.1 15.7
46
0 20 40 60 80 100 120 140 20 40 60 10 30 50 15 25 35 45 55 65 表 4.12 の結果より、システムから出⼒された予測誤差率の低いデータが実際の誤差 率も低いことが確認できる。また、システムに⼊⼒された全データに対する予測誤差率 及び実際の誤差率の分布を⽐較した結果を以下の図 4.14 に⽰す。 図 4.14 予測誤差率と実際の誤差率の分布 図 4.14 の結果よりテストデータに対してだけではなく、未知データに対しても実際 の誤差率に近い傾向で予測誤差率を導出できているため、予測誤差率が伝達関数の予測 精度の基準として信頼性が⾼いデータであることが確認できた。これによりシミュレー ションを介すことなく、所望の電源特性をシステムに⼊⼒するだけで瞬時に制御⽤フィ ルタの伝達関数とその予測精度を得ることができ、予測精度を確認しながら⼊⼒する電 源特性の調整が⾏えるため、設計者の勘や知識に頼らず誰でも設計が可能となる。47
第5章 まとめと今後の課題
5.1
まとめ
本論⽂では、NN を⽤いて電源特性から伝達関数を予測する⼿法を応⽤して、GA に よる最適化過程で得られるデータを学習データに使⽤する⼿法と、NN による伝達関 数の予測精度を別の NN によって導出する⼿法を提案した。GA による学習データ作 成⼿法を⽤いることで、NN の学習に適したデータを効率的に作成することが可能で ある。また、別の NN による予測精度の導出⼿法により、NN から出⼒された伝達関 数に対してその予測精度をシミュレーション無しに確認することが可能である。さら に、本⼿法で作成された 2 つの NN から⾼速設計システムを構築することで、ユーザ ーが電源特性を⼊⼒すると、瞬時に伝達関数とその予測精度を得ることが可能とな る。これにより、設計者を選ぶことなく誰でも簡易的にフィルタ伝達関数の設計が⾏ える。5.2
今後の課題
今後の課題としては⼤きく 2 つの内容が挙げられる。1 つは、コンバータの素⼦パ ラメータの変化に対応した伝達関数の予測を可能にすることである。本研究ではコン バータの素⼦パラメータを固定して学習データを作成しているため、素⼦パラメータ が変動した際の予測ができない問題がある。素⼦パラメータの変動を学習データに含 めるとデータ範囲が膨⼤に広がるため、汎化性能を落とさずかつ正確な学習をする⽅ 法を模索する必要がある。もう 1 つは全ての電源特性において予測誤差率と実際の誤 差率を⼀致させる必要があることである。全ての電源特性の平均誤差率においてはほ ぼ傾向が⼀致しているが、それぞれの電源特性で⾒ると⼀致しないパラメータが存在 するため、予測誤差率を完全な予測精度と判断することができない問題がある。解決 には、電源特性モデルを作成する際に精度が悪くなりやすいパラメータに対して重み を加えて、全ての電源特性の精度を⼀定に保つ調整をする必要がある。48
謝辞
本研究を進めるにあたって、ご指導を頂いた所属研究室の髙井伸和准教授、サンケ ン電気株式会社の⼭崎尊永⽒、下川宗⼀郎⽒、⽵本義孝⽒、岩渕昭夫⽒に感謝の意を 表します。また、有益な助⾔を頂いた同研究室の新井信吾⽒、永嶋宣彦⽒、松場輝樹 ⽒、猿⽥将⼤⽒、今野哲史⽒、同研究分野の新井貴之⽒、齋藤彰寛⽒、中島望夢⽒に ⼼より感謝を申し上げます。また、論⽂審査をして頂きました栗⽥伸幸准教授、⼸仲 康史准教授に⼼より感謝申し上げます。49
参考⽂献
[1] S. Arai、 N. Takai、 Y. Kubo、 A. Iwabuchi、 S. Shimokawa、 Y. Takemoto、 T. Yamazaki、 ''Automatic design of higher-order transfer function of the control circuit of the step-down converter、 '' 電気学会 電子・情報・システム部門大会、 琉球大学、 Sep.2019.
[2] JIANHAI YU 、 ZHIGANG MAO、 ”A Design Method in CMOS Operational Amplifier Optimization Based on Adaptive Genetic Algorithm、” WSEAS Transactions on Circuits and Systems archive、 Volume 8 Issue 7、 Pages 548-558、 July 2009
[3] Y. Kubo、 N. Takai、 M. Fukuda、 T. Matsuba、 T. Yamazaki、 S. Shimokawa、 A. Iwabuchi、 ''Regression Analysis of Transfer Function of an Analog Filter from Circuit Characteristics Using Deep Learning、 '' 9th International Conference on Advanced Micro-Device Engineering、 P064、 Kiryu、 Japan、 Dec. 2018.
[4] A.J.Forsyth and S.V.Mollov 、 ''Modelling and control of DC-DC converters 、 '' Power Engineering Journal、 Vol. 12、 No. 5、 229-236、 Oct 1998.
[5] K.H.Ang、 G.Chong、 and Y.Li、 '' PID Control System Analysis、 Design、 and Technology '' IEEE Transections on Control Systems Technology、 Vol. 13、 No. 4、 559-576、 July 2005.
[6] M.Abadi、 P.Barham、 J.Chen、 Z.Chen、 A.Davis、 J.Dean、 M.Devin、 S.Ghemawat、 G.Irving、 M.Isard、 M.Kudlur、J.Levenberg、 R.Monga、 S.Moore、 D.G.Murray、 B.Steiner、 P.Tucker、 V.Vasudevan、 P.Warden、 M.Wicke、 Y.Yu、 and X.Zheng '' TensorFlow: A system for large-scale machine learning '' 12th USENIX Symposium on Operating Systems Design and Implementation OSDI' 16、 265-283、 Nov 2016.
[7] N. Takai、 M. Fukuda、 ''Prediction of Element Values of OPAmp forRequired Specifications Utilizing Deep Learning、 '' IEEE International Symposium on Electronics and Smart Devices 2017、 SS2-6、 Yogyakarta、 Indonesia Oct 2017.
50
学会成果
(1) 久保 友助、 髙井 伸和、 福⽥ 雅史、 松場 輝樹、 ⼭崎 尊永、 下川 宗⼀ 郎、 ⽵本 義孝、 岩渕 昭夫、 ''深層学習を⽤いた回路特性によるアナログフィル タ伝達関数の回帰分析、 '' 第 8 回 電気学会 東京⽀部 栃⽊・群⾺⽀所 合同研究発表 会、 ETG-18-22、 pp. 73-76、 群⾺⼤学、 Mar. 2018. (2) 松場 輝樹、 髙井 伸和、 福⽥ 雅史、 久保 友助、 ''深層学習を⽤いたアナログ集 積回路設計のための幅広い要求仕様に応える学習データ作成、 '' 第 8 回 電気学会 東 京⽀部 栃⽊・群⾺⽀所 合同研究発表会、 ETG-18-81、 pp. 248-251、 群⾺⼤学、 Mar. 2018. (3) 松場 輝樹、 髙井 伸和、 福⽥ 雅史、 久保 友助、 ''深層学習を⽤いた最適アナロ グ回路トポロジーの推論、 '' 電気学会 電⼦回路研究会、 ECT-18-076、 筑波⼤学、 Oct. 2018.(4) T. Matsuba、 N. Takai、 M. Fukuda、 Y. Kubo、 ''Inference of Optimal Analog Circuit Topology Using Deep Learning、 '' IEEE International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS 2018)、 pp. 131–
134、 Okinawa、 Japan、 Nov. 2018.
(5) Y. Kubo、 N. Takai、 M. Fukuda、 T. Matsuba、 T. Yamazaki、 S. Shimokawa、 A. Iwabuchi、 ''Regression Analysis of Transfer Function of an Analog Filter from Circuit Characteristics Using Deep Learning、 '' 9th International Conference on Advanced Micro-Device Engineering、 P064、 Kiryu、 Japan、 Dec. 2018.