人工知能技術に関する調査研究等委員会
報告書
2009 年 3 月
財団法人 人工知能研究振興財団
この事業は、競輪の補助金を受けて 実施したものです。
http://ringring-keirin.jp
− 2 −
ま え が き
近年の情報技術の進展により,コンピュータやインターネットが私たちの生活の至る所 に浸透してきました.特に最近では情報技術と他の分野を融合したさまざまな技術が,試 作段階から,ビジネスや公共利用など実用の段階へとシフトしつつあります.特にロボッ ト開発分野においてはここ数年で急成長し,以前にはその普及を予想することが難しかっ た小型二足歩行ロボットなどは現在では安価に購入・利用することができる時代となって います.またその普及分野もエンタテイメント分野から次第に福祉や業務用途など実用的 な分野に導入されつつあります.しかし,ロボットはソフトウェアとハードウェアとが複 雑に組み合わされたシステムであるため,その設計および開発手法についての十分な情報 を得ることが難しいのが現状です.そのためロボット開発を行う個人や各事業者はその完 成に至るまでのさまざまな問題を個別に判断せざるを得ない状況にあるといえます.
本事業では,ロボットの中でも特に知的活動を行うことができる知能ロボットに注目し,
「空気を読む音楽プレイロボット」の実現に向けたソフトウェアとハードウェアの双方の アプローチから調査研究を行いました.
ソフトウェアによるアプローチでは,これまでの人工知能技術を応用し,人間が普段経 験を通じて修得する「空気を読む」という作業をどのように実現されるかについて検討し,
アンケート調査や予備実験の実施により,「空気を読む」アルゴリズムの実現に向けた一定 の有効性を確認しました.
またハードウェアによるアプローチでは,ロボット開発がより体系的に開発されること が期待されている現状に基づき,知能システムや電子デバイス・センサ間をつなぐ柔軟な インタフェース構築を,プログラマブルロジックデバイスによって実現するための調査お よび試作実験によって評価しました.
人工知能技術をより高度に活用し,またロジックデバイスを柔軟なインタフェースとし て活用することで,より人間らしい高度な知能ロボットの開発が進むと予想されます.
本事業の調査結果により,知能ロボット開発における人工知能技術の活用や,プログラ マブルロジックデバイスを用いたインタフェースの利活用に対する指針が得られることを 期待します.
遠藤委員長 記す
− 3 −
人工知能技術に関する調査等研究委員会名簿
(略称: 適応ヒューマンインタフェース研究会)
顧問
福村 晃夫 名古屋大学名誉教授・中京大学名誉教授 委員長
遠藤 守 中京大学情報理工学部 准教授 委員
加納 政芳 中京大学情報理工学部 講師(委員長補佐)
中村 剛士 名古屋工業大学大学院工学研究科 准教授 川中 普晴 三重大学大学院工学研究科 助教
後藤 昌人 金城学院大学現代文化学部 講師 中 貴俊 中京大学情報理工学部 助手 海老原 祐太郎 シリコンリナックス株式会社
木村 憲次 株式会社ビジネスデザイン研究所 代表取締役社長
小松 慈明 ブラザー工業株式会社 NID開発部 戦略開発推進グループ チー ムマネジャー
近藤 雄二 リンナイ株式会社 執行役員 開発本部長 山村 篤志 東邦ガス株式会社 情報システム部長 オブザーバー
竹村 初美 中部経済産業局 地域経済部 情報政策課長(2008.4)
三橋 一美 中部経済産業局 地域経済部 情報政策課長(2008.5 - 2009.3)
高見 均 東邦ガス株式会社 総合技術研究所 基盤技術研究部 通信・制御 技術グループ 総括
藤垣 善昭 リンナイ株式会社 開発本部 技術管理部 技術企画室 技術主事 佐藤 秀之 株式会社エクサバイト 営業部主任
久原 政彦 中京大学情報科学研究科 博士後期課程 大学院生 講演会講師
伊藤 誠 中京大学情報理工学部 教授 井澤 裕司 信州大学工学部 准教授 清水 優 中京大学情報理工学部 准教授 種田 行男 中京大学情報理工学部 教授 鈴木 達也 名古屋大学大学院工学研究科 教授 事務局
小島 召征 財団法人人工知能研究振興財団 専務理事
内田 昭典 財団法人人工知能研究振興財団 事務局長(2008.4 - 2008.6)
中村 仁 財団法人人工知能研究振興財団 事務局長(2008.7 - 2009.3)
− 4 −
目次
1. 報告書概要...9
1.1はじめに...9
1.2ロボットのいる社会を目指して...9
1.3空気を読むロボットの実現に向けた人工知能の要素技術...9
1.4 事前アンケート... 10
1.5組み込みデバイスを用いた知能ロボット開発の可能性... 10
1.6心理状態の推定と生体制御に関する予備実験... 11
1.7 空気を読むロボット実現のための予備実験... 11
1.8 ロジックデバイスを用いた知能ロボットインタフェースの検討と試作... 12
1.9まとめ... 12
2. ロボットのいる社会を目指して... 13
2.1. 様々なロボット... 13
2.1.1. 産業用ロボット... 14
2.1.2. サービスロボット... 15
2.2. レスキューロボット開発における事例... 18
2.3. 知能ロボット構築に向けた課題の整理... 22
2.4. まとめと「空気を読む」ロボット開発の提案... 22
参考文献... 23
3. 空気を読むロボットの実現に向けた人工知能の要素技術... 24
3.1. 研究アプローチ... 25
3.2. ニューラルネットワーク... 26
3.3. 学習... 29
3.3.1. 教師ありネットワークの学習アルゴリズム... 29
3.3.2. 教師なしネットワークの学習アルゴリズム... 31
3.3.3. 強化によるネットワークの学習アルゴリズム... 33
参考文献... 36
4. 「空気を読む」とは? 〜事前アンケート調査の実施〜... 37
4.1. 事前アンケート調査の目的・規模・対象... 37
− 5 −
4.2. 「空気を読む」とはどういうことか?... 38
4.3. 思い浮かぶロボット像... 39
4.4. 活躍する場面... 41
4.5. ストレスの対処の仕方... 42
4.6. どのような音・音楽でリラックスできるか... 43
4.7. 音・音楽が必要な時,場面... 45
4.8. 事前アンケート調査の結果から... 47
参考文献... 48
5. 医療・福祉分野における「空気を読む」ロボットに関する事前アンケート調査... 49
5.1. アンケートの概要... 49
5.2. 「空気を読める人」に関するアンケート結果... 49
5.3. 「空気を読めない人」に関するアンケート結果... 52
5.4. 日常生活において「空気が読めない」と感じた体験... 56
5.5. ロボットが「空気を読む」ために要求される機能... 57
5.6. 医療・福祉分野における「空気が読めるロボット」の利用例... 59
5.7. 医療・福祉分野以外における「空気が読めるロボット」の必要性... 61
5.8. 得られたアンケート結果から 〜医療や福祉における「空気が読めるロボット」の 必要性と可能性〜... 62
5.8.1. 現代の医療とそれを取り巻く医療技術の研究開発の現状... 62
5.8.2. 「空気が読めるロボット」の必要性と可能性... 64
参考文献... 67
6. 組み込みデバイスを用いた知能ロボット開発の可能性... 70
6.1. 知能ロボット開発に必要なハードウェア技術... 70
6.2. 様々な組み込み向けデバイス... 71
6.2.1. マイクロコントローラ(MCU)... 71
6.2.2. ARM... 74
6.2.3. プログラマブルロジックデバイス(PLD)... 76
6.3. ロボット開発のための知的インタフェース開発に向けたまとめ... 78
7. 心理状態の推定と生体制御... 80
7.1. ストレス社会とリラクゼーション... 80
− 6 −
7.2. リラクゼーション効果の評価... 82
7.3. リラクゼーション効果検証実験... 84
7.3.1. 実験環境... 84
7.3.2. 実験手順... 85
7.3.3. ストレス負荷... 86
7.3.4. 提示映像... 86
7.3.5. 解析方法... 88
7.4. 実験結果および考察... 89
7.4.1. ストレス負荷状態と安静状態の比較... 89
7.4.2. 閉眼状態と映像鑑賞状態の比較... 91
7.4.3. TPA絶対量による比較... 91
7.4.4. TPA変化率による比較... 93
7.4.5. TPA差分による比較... 95
7.5. 視覚刺激による生体制御の可能性... 98
参考文献... 99
8. 空気を読むロボット実現に向けた予備実験... 101
8.1. 統計的手法による環境音とボリュームの関係調査... 101
8.1.1. 実験方法...101
8.1.2. 実験結果...102
8.1.2.1. 絶対量での解析結果... 103
8.1.2.2. 相対量での解析結果... 103
8.1.2.3. Face Scaleに基づいた分類による解析結果... 105
8.1.2.4. 重回帰分析結果... 106
8.1.3. 考察... 106
8.2. 人工知能アルゴリズムを用いた関連性の抽出実験... 107
8.2.1. SOMによる抽出実験結果... 107
8.2.2. ニューラルネットワークによる抽出実験結果... 110
参考文献... 112
9. ロジックデバイスを用いた知能ロボットインタフェースの検討... 113
9.1. 空気を読むロボット開発のためのハードウェア設計... 113
− 7 −
9.2. 事前準備... 115
9.3. 各種モジュールの試作... 116
9.4. 画像処理アルゴリズムと評価実験... 118
9.5. 考察と今後の展望... 119
10. まとめ... 120
− 8 −
1. 報告書概要
本章は,本報告書全体から一部を抜粋し,まとめたものです.まずは本章の概要を読み,
興味のある内容については,本報告書の2章以降で詳細をご覧下さい.
1.1 はじめに
本事業では,人工知能技術の応用例としてロボット開発に注目し各種調査を行った.ロ ボットの中でも特に知的活動を行うことができる知能ロボットに着目し,「空気を読む音楽 プレイロボット」の実現に向けたソフトウェアとハードウェアの双方のアプローチから調 査研究を行った.
1.2 ロボットのいる社会を目指して
第2章において,現状におけるロボットの普及状況,およびその適用分野を調査しまと めた.従来の産業用ロボット以外の分野での開発事例に着目し,中でも介護・福祉用途や 業務用途のロボット開発が着実に進んでいることが確認された.またロボット開発のなか でも近年急速に研究開発が進むレスキューロボットに焦点をあて事例調査を行った.本事 業では,これらの調査結果から,知能ロボットの開発に必要な要素を抽出し,「空気を読む」
アルゴリズムの実現に向けた問題の整理と最終目標としての「空気を読む音楽プレイロボ ットの開発」を課題とした.
「空気を読む」ロボットが実現できれば,一般家庭でのエンターテインメント利用,介 護・福祉現場での利用,家電製品への応用(空気を読み,音楽を鳴らしてほしいときに適 切な曲を選択し再生する音楽プレイヤーなど)が可能となるだろう.
1.3 空気を読むロボットの実現に向けた人工知能の要素技術
第 3 章において,「空気を読む」アルゴリズムをコンピュータシステムによって実現す るための各種要素技術について調査を行った.本アルゴリズムを実現するには,時系列が 学習可能な強化学習器の開発が重要であり,短期的な空気の変化の学習には強化学習器の 開発,そして長期的な空気の変化の学習にはリカレントニューラルネットワーク(SRN)の導 入が有効であるとする結論を得た.これにより強化学習器によって情動などによってもた らされる短時間的な空気の変化を学習・対応し,SRNによって場のムードなどの長期的な
− 9 −
空気の変化を学習・認識する斬新なアルゴリズムが実現可能となる.
1.4 事前アンケート
第4章では,学生を対象とした「空気を読む」ことについての予備調査として,事前ア ンケート調査を行った.得られた結果として,「空気を読む」ことに対する認識およびそれ に対応する行動は人によってまちまちであり,知能ロボットにより「空気を読む」アルゴ リズムを実現する際には,前述した短期的な空気の変化(人間の情動)と長期的な空気の 変化(個人の気質・場の雰囲気)の両方を如何に組み合わせて学習するかが重要であると の結論を得るに至った.
第5章では,工学・医療福祉を専攻する学生に対する事前アンケート調査を行った結果 を述べた.本アンケート調査により医療や健康,福祉分野への応用という観点に立った多 数の応用案が回答として得ることができた.特に,通常の医療業務を補助する内容に加え てメンタル面でのサポート,障害者への介護のサポートを行う応用例が目立ったように思 われた.仮に「場の空気」を読むことができる,あるいはユーザ(人間)の感情や精神状 態を何らかの方法で定量的に計測することができるようなロボットが開発された場合,ロ ボットを用いてユーザとなる患者の喜怒哀楽(感情や心理状態など)を把握することが可 能になるとともに,得られた患者の心理状態などを用いてユーザに最適な表情を作る,あ るいは「声かけ」をするようなロボットへ発展させることができる可能性は高く,これら の技術をさらに発展させて行くことにより,ロボットを用いた精神医療支援などへの展開 も多いに期待できることが示唆された.
1.5 組み込みデバイスを用いた知能ロボット開発の可能性
第6章では,知能ロボットの実現手法として注目される組み込みデバイスについて調査 し,まとめた.近年ではロボット制御の代表的な手法として,集積回路(LSI)に異なる複 数の機能をもたらす周辺回路を1チップにパッケージ化したマイクロコントローラ(MCU)
の利用が目立っている.MCUの利点は必要な機能を予め予測した上で製造することにより,
実際の制御アルゴリズムにはコンピュータシステムから転送されるソフトウェアによって 容易にプログラミング出来る点にある.一方,近年では制御アルゴリズムをハードウェア 的に実現可能なプログラマブルロジックデバイスにも注目が集まっている.FPGAを代表 とするプログラマブルロジックデバイスは,製造後にユーザが独自に回路を設計すること が可能なため,MCUのように利用しない機能が無駄になることはなく,また動作回路もソ
− 10 −
フトウェアによる処理ではないため,使い方によってはMCUよりも高速に動作することが 期待される.
本調査結果より,今回目標とする先進的な知能ロボットのインタフェース開発を,FPGA などのプログラマブルロジックデバイスを用いて試みる点に新たな可能性が見出せるので はないかとの結論を得た.
1.6 心理状態の推定と生体制御に関する予備実験
第 7 章では,特に人間の心理として「ストレス状態」に着目し,心理ストレスの計測と 計測されたストレスを緩和する生体制御の方法について検討を行い実験によりその有効性 を確認した.
具体的には,映像によるリラクゼーション効果に注目し,再生速度の異なる映像を鑑賞 した時に被験者が得るリラクゼーション効果についてTPAという指標を用いることによっ て定量的解析を試みた.また,その比較対象として一般に安静状態として使用される閉眼 安静状態を用いた.各実験及び統計解析の結果を総合すると,本実験で用いた k=0.6, 1.0 で制御した映像に関しては,閉眼状態よりも,映像を鑑賞する方がリラクゼーション効果 が大きいのではないかという推測がされる.さらに,再生速度間に効果の差がある可能性 も示唆された.このことから,映像によるリラクゼーションに は一定の効果が見込まれる ことが期待でき,映像の再生速度というものがその 効果を高める重要な1要素となるので はないかと考えられた.
1.7 空気を読むロボット実現のための予備実験
第8章では,「空気を読む音楽プレイロボットの開発」を想定し,空気を読むアルゴリズ ムの実現に向けた予備実験を実施した.実験手法は,被験者に2種類の音を環境音として 提示し,被験者はその環境の中で心地良いと感じる音量を被験者自信が設定し,その値を 記録するというものである.予備実験は,無意識による環境音(雨音を加工したホワイト ノイズ)でのBGM音量設定と,意識的な環境音(ニュースの読み上げアナウンス)での BGM音量設定のそれぞれ20名,計40名を対象に行われた.得られた結果について,
絶対量および相対量での解析,Face Scaleに基づいた分類による解析,重回帰分析による分 析を行い以下の結論を得た.
− 11 −
1. 環境音量を処理する際には,絶対音量よりも個々に対応した相対音量を用いたほうが よい
2. 心理状態(Face Scale結果)と,BGM設定音量は無関係である.心理状態の幅を持 たせた実験が必要と考える
3. 3つの情報(環境音量,性別,環境音の種類)で,ある程度のBGM音量予測が可能 となる
併せて,本実験ではさらなる「空気を読む」ための要素の抽出には,追加の実験を行う 必要性があると確認された.
1.8 ロジックデバイスを用いた知能ロボットインタフェースの検討 と試作
第9章では,知能ロボットの開発を支援し,より体系的で効率的なロボット開発を行う ためのインタフェース構築手法として,プログラマブルロジックデバイスを活用したイン タフェース試作実験を行った.今回はその一例として,ロボットに接続される画像処理セ ンサに着目し,知能ロボットが行うべき多くの情報処理機構を,本試作インタフェースを 用いて分散的に処理することが可能であることを確認した.また本実験から今後,画像情 報処理のみでなく,音声や他のセンサからの入力情報についても同手法を用いることによ って効果的に処理することが可能であることを確認した.一方で処理の高速化や複雑化を 実現する上での課題や小型化に関する課題が明らかとなり,より一層の試験が必要である との結論も併せて得られた.
1.9 まとめ
第10章において,本事業内容についてまとめた.
本事業においては,ロボット開発の現状およびその課題についての事前調査をもとに,
知能ロボット開発のための各種調査および実験を行った.具体的な課題として「空気を読 む音楽プレイロボット」の開発を目標として掲げ,ソフトウェアとハードウェアの両面か ら解決しなければならない課題の整理と抽出を行った.さらにそれらを解決するための現 実的な手法について提案し,それらの提案に基づく各種実証実験・試作実験を行った.実 験の結果から「空気を読む」次世代の知能ロボットの実現に向けた具体的な成果を得ると ともに,その実現可能性をより高めるための多くの課題を得た.
− 12 −
図2.2:PINO(ZMP)
図2.4:家庭用清掃ロボット
「ルンバ」(iRobot)
図2.3:アクトロイド
(ココロ)
図2.1:Ifbot
(ビジネスデザイン研究所)
2. ロボットのいる社会を目指して
近年ではテレビやアニメだけでなく,イベント会場や玩具屋 など,街の至る場所で様々なロボットに出会う機会も少なくな
い(図2.1-2.3).開発されている多種多様なロボットが数多く
開発されているのに対し,今後どのようにロボット開発が進め られてゆくのかについて,これまでの開発および普及の経過を 調査することは,ロボット産業およびロボット開発における将 来を見据えるための重要な要素であると考えられる.
本章では現在もなお精力的に研究開発が進む様々な用途の ロ
に我々の生活基盤を支える多種多 様
ト
ト
ット
ト
ボットがどのような場面で,またどのように開発されてきた のかについて調査し報告する.また本章後半では具体例として レスキューロボットに焦点をあて,その開発の始まりや用途,
開発手法などについて調査し,今後のロボット開発における課 題の整理を行い,まとめる.
2.1. 様々なロボット
私たちの住む社会には,既
なロボットが活躍している.これらを分類すると,主に製造 業界など第2次産業における機械作業の高能率化を目的とし た産業用ロボットと,第3次産業における活用を目的としたサ ービスロボットとして大別される 2 種類のロボットの活躍が 目立つ.とくに実用ロボットとして多様な機能を備えたサービ スロボットには,
・家庭用ロボッ
・パートナーロボッ ・エンタテイメントロボ ・家事支援ロボット(図2.4)
・競技用ロボット
・業務用ロボット
・レスキューロボッ
− 13 −
な 様々な用途を目的としたロボットが現在でも積極的に開発されており,当該分野で
.1.1. 産業用ロボット
や電子部品を生産する工
来の定義はティーチングプレ
に動
図2.6)
る.これらは人間が行った場合に多くの
ことにより,労働者の ど
の利活用が今後も進められてゆくと期待される.
2
産業用ロボットは,自動車
場において,人間の代わりに作業を行う機械装置のこ とをいう.
産業用ロボットの本
イバックとよばれる,動作を学習させ再生することに より作業を行う機能をもつロボットのことをいう.し かし近年では先にも述べたように,人間の代わりに作 業をする機械としての役割が重視され,ある程度自律的
ボットアーム)をさす場合が多い(図2.5).ISOでは産業用ロボットを,「3軸以上の自由 度を持つ,自動制御,プログラム可能なマニピュレータ」と定義している.
産業用ロボットの具体的な活躍の場を用途別に挙げると,
図2.5:ロボットアームの例 作する人間の腕に似た機械(ロ
図2.6:壁面塗装ロボット
・組み立てロボット
・搬送ロボット
・溶接ロボット
・塗装ロボット(
・検査ロボット
・研磨ロボット
・洗浄ロボット などさまざまであ
健康被害を受ける可能性のある環境に積極的に導入されて いる.また生産力向上や品質維持の面からもロボットを活 用する利点は多いとされている.
さらに工場全体をロボット化する
図2.7:産業用ロボットに よるオートメーション 賃金を抑え最低限の要因のみで工場の自動化を行う「ファ
クトリーオートメーション」についても,特に製造業の現 場での活躍が注目されている(図2.7).
− 14 −
2.1.2. サービスロボット
汎用的な産業用ロボットと区別され,主にサービス業において利用されるロボットをサ ービスロボットと呼ぶ.
サービス業における業務内容はさまざまで,また設置環境も多岐にわたるため,その導 入は産業用ロボットに比べあまり進んでいないのが現状である.しかし,近年におけるロ ボット技術の開発が進んだことや,少子高齢化による労働力不足の対策として実用化の機 運が高まっていることから,着実に開発・実用化が進んでいるといえる.
図2.8:サービスロボットの種類別販売推移(国内):シード・プランニング調べ(2008.12)
図 2.8 にあるように近年ではペット犬や人型ロボットなど主にエンタテイメント分野で の大手メーカの撤退もあり,2007年から市場全体は若干縮小してはいるものの,実用的な 介護・福祉分野や加工などを行う業務用ロボット,教育・研究用といった用途において,
ロボットの需要は拡大の一途を辿っている.
図2.9:サービスロボット 372 種類の内訳:シード・プランニング調べ(2008.12)
− 15 −
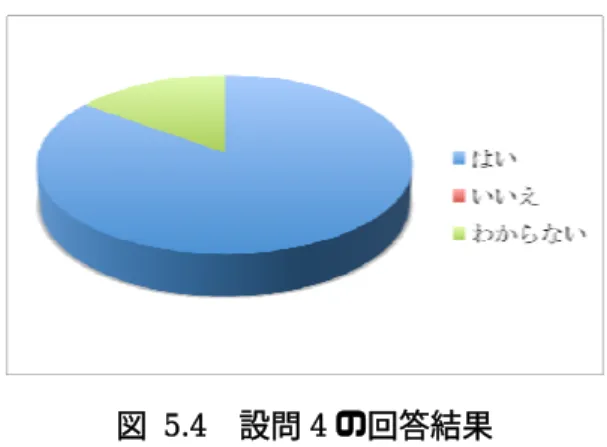
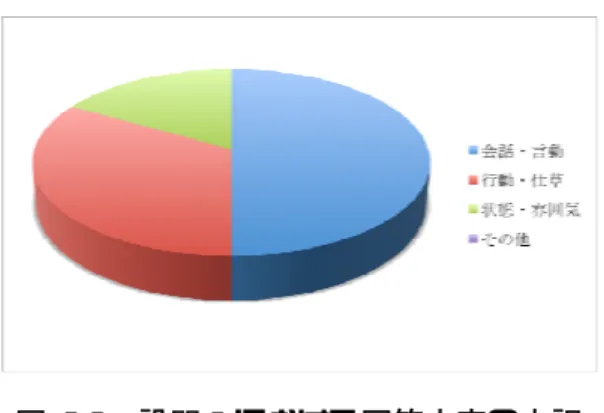
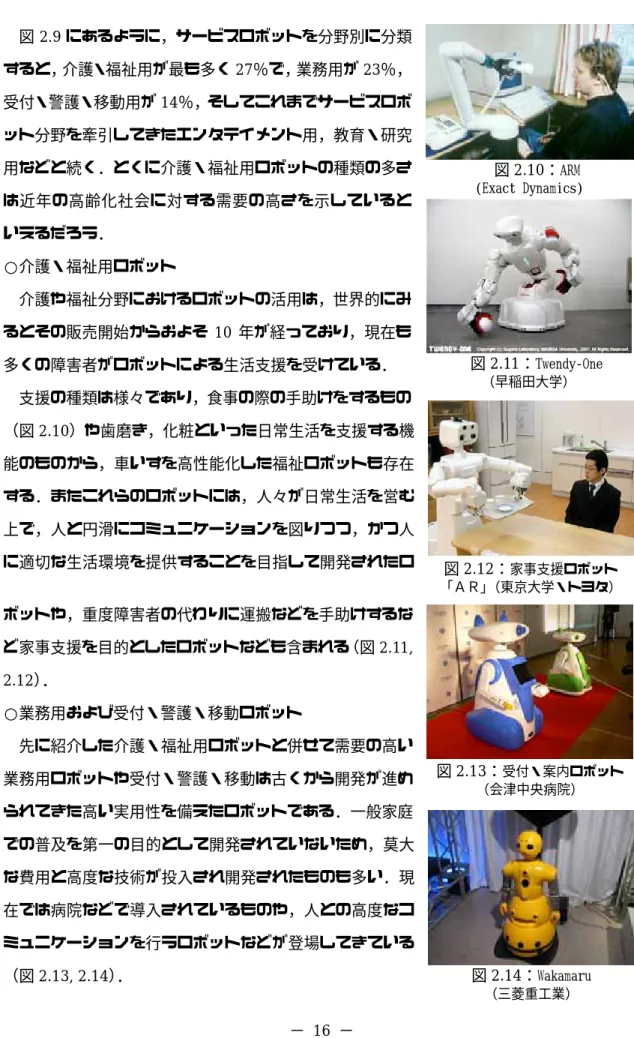
図2.9にあるように,サービスロボットを分野別に分類 す
,そしてこれまでサービスロボ ッ
○介護・福祉用ロボット
介護や福祉分野におけるロボットの活用は,世界的にみ るとその販売開始からおよそ 10 年が経っており,現在も 多くの障害者がロボットによる生活支援を受けている.
支援の種類は様々であり,食事の際の手助けをするもの
(図2.10)や歯磨き,化粧といった日常生活を支援する機
能のものから,車いすを高性能化した福祉ロボットも存在 する.またこれらのロボットには,人々が日常生活を営む 上で,人と円滑にコミュニケーションを図りつつ,かつ人 に適切な生活環境を提供することを目指して開発されたロ
ボ
先に紹介した介護・福祉用ロボットと併せて需要の高い 業務用ロボットや受付・警護・移動は古くから開発が進め られてきた高い実用性を備えたロボットである.一般家庭 での普及を第一の目的として開発されていないため,莫大 な費用と高度な技術が投入され開発されたものも多い.現 在では病院などで導入されているものや,人との高度なコ ミュニケーションを行うロボットなどが登場してきている
(図2.13
ると,介護・福祉用が最も多く27%で,業務用が23%,
受付・警護・移動用が14%
ト分野を牽引してきたエンタテイメント用,教育・研究 用などと続く.とくに介護・福祉用ロボットの種類の多さ は近年の高齢化社会に対する需要の高さを示していると いえるだろう.
ットや,重度障害者の代わりに運搬などを手助けするな ど家事支援を目的としたロボットなども含まれる(図2.11, 2.12).
○業務用および受付・警護・移動ロボット
図2.10:ARM
図2.12:家事支援ロボット
「AR」(東京大学・トヨタ)
図2.13:受付・案内ロボット
(会津中央病院)
(Exact Dynamics)
図2.11:Twendy-One
(早稲田大学)
図2.14:Wakamaru
(三菱重工業)
, 2.14).
− 16 −
− 17 −
図2.17:寿司製造ロボット
(鈴茂器工)
○
ットが開発された.こうした背景には1 ニメや漫画,SF小説における架 空
人のストレスを軽減させたり,
果に注目したペット型ロボット ている.
う作業を軽減することを目的としたさまざまなロボットが 存在する(図 ).これらは業務用途で開発されるため 人目につく機会は他のロボットに比べ多くないが,人に似 がないことや安全性や実用性を第一に設計され るため,今後も急速に開発・導入が進むと考えられている.
また,ロボット開発は現在も発展途上にあるため,特定 の題材を設定し開発者等に競技としての楽しみを刺激する ことによってロボット開発を促進させようという動きもあ る.この分野では特に が著名であり,エンタテ イメントとしてのサッカー競技(図 )や,実用性を考 慮したレスキューロボット開発,家庭での人との共存を目 的としたロボット開発などが競技として行われている.
エンタテイメントロボット
これまでのロボットが利便性を求めた実用的なロボット であったのに対し,エンタテイメントロボットは動作する ことによって人を和ませたり楽しませたりするように設計 されたロボットのことをいう(図2.15, 2.16).先の調査結 果にもあるように,ロボット開発の黎明期には多くのエン タテイメントロボ
図2.15:AIBO(ソニー)
960年代以降のテレビア
のロボットの活躍が挙げられる.近年のロボット開発技 術の向上により,現在では高度な技術を要求する2足歩行 ロボットなども比較的安価に購入することが可能である.
また単に人を楽しませるだけでなく,その愛らしい風貌 やしぐさによって,そのロボットと触れ合うことにより当 また自信を持たせたりといった精神的な健康面での回復効 なども開発されており,医療の現場などでの活躍が期待され
○その他のロボット
サービスロボットの中には産業用ロボット同様に人の行
2.17
せる必要性
図2.16:パロ(知能システム)
図2.18:サッカーロボッ
(ロボカップ)
ト RoboCup
2.18
− 18 −
開発における事例
で開発され,それぞれの分野に 異なるものの,ロボット開発の では具体例として,レスキュー うに開発され,今後どのような
め
人間によって行われるが,災害発生時に お
法もあ
ための時間的・経済的コストは膨大である.そのため被災地におい
害に備えやすい,つまり保管も 活躍の場として期待されている.
では1995年の阪神・淡路大震
災者探索のためのロボット技
に .
ーしきれない を行う においては,この探索型レスキ
2.2. レスキューロボット
これまで述べて来たように,ロボットはさまざまな用途 おいて着実に開発されてきていると言える.しかし用途は 要素技術においては共通する点も少なくない.そこで本節 ロボット開発の事例を挙げ,レスキューロボットがどのよ 課題を解決しなければならないのかについて調査を行いまと
○レスキューロボット開発のはじまり
レスキューロボットとは地震等で倒壊した建 物内部にいる要救助者の探索,救出を行うロボ ットである(図 2.19).通常これらの救助活動 は主に
る[1].
いては,救助活動を行っている側も被災者と なる危険がある.このため,被災者の発見は迅 速に行われ,救出されることが求められる.そ の発見には,災害救助犬などを用いる方
図2.19:遠隔操縦による探索型レス
キューロボット(千葉工業大学小柳研究室)
るが,救助犬の育成の
て要救助者の探索・救出をロボットによって行うことで,2 れ,またロボットは救助犬のように生物ではないため,災 可能で量産しやすい点などが災害現場におけるロボットの レスキューロボット開発の歴史はそれほど古くなく,日本 災をきっかけに開発が始まったとされる.
またレスキューロボットの具体的な活躍の場面は,主に被
次災害の発生を最小限に抑えら
術開発と,瓦礫除去など直接的な作業を行う建設機械の延長 特に前者は救助活動を行う人間の救助チームだけではカバ ロボット技術開発を中心に開発が進められている.本報告 ューロボット開発に焦点を当てる.
ある装置開発に二分される 被災者探索
○探索型レスキューロボット
などである.情報 術と機械技術・センサ技術を組み合わせ,多くの情報を客観的に収集・蓄積・解析出来
面も多くあると考えられる.
テ
行型のロボットは未だレスキューロボットの分野では重要視されていない.また,
イク,温度センサや測距センサ,CO2セン
には情報を伝達する通信技術を利用した情報伝送シ テムの開発も重要であると考えられる.
先に示したとおり,探索型レスキューロボットの主な用途は瓦礫や倒壊した建造物の下 敷きになっている被災者を探索することが主目的ではあるが,その具体的なアプローチ手 法は様々である.それらは例えば,探索エリア内の危険箇所や障害物を記録し,環境マッ プを構築することや,要救助者の位置や状態をマップ上にプロットし必要に応じてレスキ ュー隊もしくは近隣のレスキューロボットに情報伝達する救助支援活動
技
る点では人間以上の能力を発揮可能な場
○探索型ロボット開発の目標
探索型レスキューロボット開発の具体的な目標に
□探索機能
・ロバストな不整地移動機構の開発
・様々なセンサ機器の開発 □情報収集・整理機能
・不整地移動に対応した環境マップ構築シス
・環境マップの整理・伝送システムの開発
まず,探索機能の実現には,不整地を移動するために機械式による移動機構が必要であ り,クローラや脚による制御システムの開発が必要である.他の分野で開発が進んでいる 2足歩
は以下のようなものが挙げられる.
ムの開発
移動により変化する環境の中で要救助者を発見するためには,様々なセンサ機器を搭載す る必要がある.これらは例えば,カメラやマ
サなどが挙げられる.
また情報収集・整理機能の実現には,不整地移動に対応した環境マップシステムの構築 が必要であり,移動経路の記録を行う自己位置測定システムの開発が重要である.また環 境マッピングの高度化には,例えば 3 次元により形状測定を行うレンジファインダの開発 やこれらの情報の分析および整理,更
ス
− 19 −
○レスキューロボット開発の実際
法は現在も企業や研究機関等によって独自に進められてい
性能を大きく左右することから,必然的に求められる技術力は高 レスキューロボットの開発手
る.開発のための情報は十分に提供されているとはいえず,各研究期間が独自に判断を下 しながら試行錯誤しつつ開発を進めているのが現状である.図2.20はレスキューロボット を開発している実在の研究室における開発プロセスを図式化したものである.
目的の設定
仕様の決定
部品調達
試作
評価
設計 回路設計
機械設計 センサ設計
レスキューロボット開発に限らず,ロボット開発を行う上で特に重要と思われるのは仕 様の決定段階であろう.ロボット開発には必ずハードウェアとソフトウェアの両方の開発 が求められる.仕様内容によっては既製品で対応できるものもあるが,無い場合には独自 に製作する必要もあり,またこれらのハードウェアを制御するソフトウェアの性能如何に よっても開発ロボットの
市販品で利用可能な ものは流用,
無ければ制作
不具合の確認と整理
図2.20:レスキューロボット開発の
プロセス
くなる傾向にある.このことからハードウェアとソフトウェアの両面を網羅し,全体とし て期待した性能を得るためには 1 度の設計・製作では目標とする完成度には達しないと考 えられている(図2.21-2.23).これは試作や評価の結果次第によっては設計を再検討しなけ ればならない状況が十分起こり得ることや,場合によっては全体的な仕様の見直しも迫ら れるということである.
− 20 −
○レスキューロボット開発の課題と今後
の研究開発は,先
ウハウ集積とそれらを活かすソフトウェア技術の 大成ともいえ
されていたとしても,1個体のロボットとして組み わされた際に全体としての調和が保たれていなけ ばならず,このことがレスキューロボット開発を難 くしている要因であるともいえる.一方で,レスキ ーロボット開発はその活躍の意義や有効性が社会 に認められつつあり,実際RoboCupなどでも取り げられ,様々な研究機関によって精力的に開発が進 分野であり,今後の技術開発の進展が期待される.
現状のロボット開発に共通して注目されているの
,さらなるソフトウェア面においては,ロボットの 能化が挙げられ,ハードウェア制御の点においては,
デバイスまたはロボット間の
ェースの開発が重要であると考えられる.レスキュ 現状におけるレスキューロボット
に述べたように様々な小型ロボット開発のための要 素技術を組み合わせ,目的に適したロボット開発を行 う点で参考になる情報が多い.それらは従来の組み込 み制御機構や移動機構の開発,各種センサ処理技術の ノ
集 る.個々の要素技術は独立して研究開 発
合 れ し ュ 的 上 む は 知
各 統一的な通信インタ
フ
ーロボットにおいては,その探索活動には遠隔操作の みでなく,自立的に情報収集し判断するための知能処 理が必要だと考えられている.また,環境マップの共 有化の実現においても,複数の情報源から有用な情報 を抽出・集積し,信頼度の高いマップを構築するため
にはよりシンプルで能率的な通信インタフェースが必要であると予測される.
図2.22:独自小型フレームによる改
良型ロボット(中京大学清水研究室)
図2.21:市販フレームによる試作
ロボット(中京大学清水研究室)
図2.23:カメラアームを備えた改良
型ロボット(中京大学清水研究室)
− 21 −
2.3. 知能ロボット構築に向けた課題の整理
以上の調査により,人間のように知能を持つロボットの実現には未だ多くの課題を解決 しなければならない現状がある.
しかし,本調査結果により得られた知見として,現状において知能ロボットの実現にあ たり解決しなければならない大きな課題として,以下に挙げる項目が本調査委員会にて指 摘された.それらは,
・ロボットの開発を行うためにはソフトウェア・ハードウェアの双方からのアプローチ により全体としてバランス良く開発する必要があるだろう
・知能ロボットを人間のように振る舞わせるためには,人間の知的活動についてのより 多くの情報を得る必要があり,そのための予備実験を積み重ねる必要があるだろう
・知能ロボットを効率的に開発するためには,より柔軟で統一的なハードウェアインタ フェースの仕組みを構築しなければならないだろう
・予備実験などからエンドユーザにとってのメリットや提案するロボットと共存する意 味を考察し,社会での利便性や応用性などを考える必要があるだろう
などである.
2.4. まとめと「空気を読む」ロボット開発の提案
本章では社会的または心身にハンディを背負う人々の生活の質を保証するためのヒュー マンインタフェース開発を目的とした調査の一環として,積極的に研究開発が進められて いるロボット開発を例にとり研究調査を行った.その一例としてレスキューロボットの開 発事例をもとに,ロボット開発における課題をハードウェアとソフトウェアによる双方の アプローチからまとめた.
さらに以上の調査結果を受け,本委員会では,参加委員から具体的な成果目標について アイデアの募集を行った.様々なアイデアが委員から出されたが,基本コンセプトとして 以下の点に委員の共通見解が得られた.
・ 結果的に人のストレス軽減や気分をリラックスすることにも繋がるもの
・ 出来る限り幅広いユーザ層,年齢層に対応できるもの
・ 人々の日常生活の一部に出来る限り溶け込む形のもの
− 22 −
その結果,「空気を読む音楽プレイロボットの開発」を目標とする結論に至った.音はロ
類(楽曲やジャンル)や適音量によ においや温度などの他の入力情報と で人に情報を知らせるデバイスとし を読んで」(入力情報を得て)適切な に基づくソフトウェア的アプローチ アを結ぶインタフェースにおけるハ
作実 ).
ボットが「空気を読む」ための重要な入力情報として 間に理解のしやすい情報となる.また,通常は音の種 る場の演出や心地よさを生み出すことを想定するが,
組み合わせることにより,危険時には大音量や特異音 て機能する可能性も含む.よって,ロボットが「空気 音や音楽を適切な音量で奏でるために,知能情報処理 と,ロジックデバイスを用いたロボットとソフトウェ ードウェア的アプローチの両面から各種調査および試
機能し,さらに出力情報としても人
験を行うこととした(図2.24
入力:
音,画像など
出力:
な種類や音量の 音や音楽 適切
参考文献
[1] 清水優:「ロボット要素技術とレスキューロボット 6月26日,2008.
空気を読み,適切なタイミ 音量で音や音楽を奏
ングと でる
図2.24:提案された空気を読む音楽プレイロボット
の開発」,第2回調査委員会講演資料,
− 23 −
3. 空気を読むロボットの実現に向けた人工知能の要素技術
空気」とは,コミュニケーションの場において,言語 で
際には,コミュニケーションの場における対話者の数が重要であ り
なる の対話者内で大きな権力を
持 いっ
本研究は,コミュニケーションロボットにおける「空気を読む」機能の実現に向けた挑 戦的研究課題である.ここでいう「
は明示的に表現されない諸要素を指す.したがって,「空気を読む」とは,場を理解し,
対話者の心理変化に柔軟に対処したり,自らの考えを適切に相手に伝えることと言える.
ここで「空気を読む」
[冷泉 06,内藤 04],3人以上の場合と一対一の場合とでは,空気を読む意義が大きく異
.3人以上のコミュニケーションにおいては,たとえば,そ
つ者が言った一言によって場の空気が変わり,その他の話者の意見の価値が低下すると た現象が起こる.このように複数人の場においては,「空気」は負の作用を持ち,意思 決定などに悪影響を及ぼすことがある.他方,一対一のコミュニケーションにおいては,
正の作用が大きい.「空気」は,夫婦間における阿吽の呼吸の形成など,人間関係を良好に 維
ボッ きれば,2 者間
の信頼関係を構築でき,ロボットが長期的に利用される可能性へとつながる(図3.1).
空気を読む」機能を実現するためには,以下の社会的知能[冷泉 06,内藤 04]を実装す 必要がある.
読む)ことが可能となる.これらの能力に加え
て る必要があ
る バイス((1),(2))
か ))の開発する.
持する機能を有する.そこで本研究では,一対一のコミュニケーションにおける会話ロ トの「空気を読む」機能の実現を目指す.「空気を読む」機能が実現で
「 る
(1) 対話者の本音を見抜く能力
(2) 対話者の感情や態度を事前に察知する能力 (3) 自らの本音を正確に相手に伝える能力 (4) 二者の関係を保持する能力
このうち,(1)および(2)は,ロボットでいえば,入力インタフェースからの情報をもとに 対話者を認識する能力を指す.この認識結果を基に,(3)および(4)の能力によって,関係を 保持しつつこちらの意見を伝える(空気を
,開発されたロボットが実際に「空気を読む」ことが可能かどうかを評価す
.そこで我々知能班では,デバイス班によって開発された話者認識デ ら得られる情報をもとに,「空気を読む」知能処理((3),(4
− 24 −
図3.1:「空気を読む」機能により心の通うコミュニケーションの実現を目指す
図 .2:認識デバイスから得られたコミュニケーションの場の情報,対話者情報(個人認識,過去の感情変
化など)をSRNに入力し,長期的な変化を算出する.SRNで得られた情報と対話者情報(情動変化など)
を強化学習器に入力することで長期的・短期的な変化を考慮した「空気を読んだ」行動出力を行う.
3.1. 研究アプローチ
んだ」表出を行うためには,時空間的な学習が不可欠である.すなわち,コ
きる そこで本研究では,時系列が学習可能な強化学習器およびリカレ トニューラルネットワークを用いた「空気を読む」アルゴリズムを提案する(図 3.2).
これは,強化学習器によって情動などによってもたらされる短時間的な空気の変化を学 3
「空気を読
ミュニケーションの場という空間の理解と,空気の変化という時間的な概念を巧く処理で 機構が必要である.
ン
習・対応し,SRNによって場のムードなどの長期的な空気の変化を学習・認識する斬新な アルゴリズムである.
「空気を読む」ロボットが実現できれば,一般家庭でのエンターテインメント利用,介 護・福祉現場での利用,家電製品への応用(空気を読み,音楽を鳴らしてほしいときに適
− 25 −
切な曲を選択し再生する音楽プレイヤーなど)が可能となる.
図3.3:生体の脳の模式図
図3.4:形式ニューロン
ルネットワーク
ューラルネットワークとは,生体の脳(以下,単に脳と記す)を模擬したデータ構造 であ )は,情報を受け取る樹状突起と,情報を送り出す軸
索を ようにして情報のやり取りを行う(図
3.3)
) 出力側ニューロンの電気パルスが,シナプス結合を介して,入力側ニューロンの膜電
,電気パル スを発生し,他のニューロンに電気パルスを伝達する
3.2. ニューラ
ニ
る.脳の神経細胞(ニューロン
持ち,これらによって,他のニューロンと以下の
.
(1
位に影響を与える
(2) 入力側ニューロンの膜電位は,多数の出力側ニューロンの電気パルスの影響が加算さ れて変化する
(3) ニューロンの膜電位があるしきい値を超えると,そのニューロンは興奮し
− 26 −
この仕組みを形式的に表現すると,図3.4のように表現できる.これは,形式ニューロン と呼ばれ,ニューラルネットワークを構成する最小単位(ユニット)となる.形式ニュー ロンでは,ニューロン間の結合が重み付き結線で表現されており,結合重み w によって電 気パルスの大きさが計算される.したがって,wの値が正であれば興奮性の結合を,負であ れば抑制性の結合を表す.以上より,ニューロンの膜電位uおよび,発火時の電気パルスs は
ここで,θは膜電位のしきい値,f()はユニットの発火を決定する関数である.
ニューラルネットワークの特徴としては,(1)学習システムである,(2)汎化能力を有する,
(3)故障やノイズに対して頑健である,(4)比較的容易に計算機上で実装できる,などが挙げ られる.まず,ニューラルネットワークが学習システムであることは, を模擬して作ら
の 本的なデータ構造および学習アルゴリズムがシンプルであるためである.
,以下のように分類される[Pfeifer 99].
ネットワーク 以下の式で表現できる.
) (
) (
1 1
θ θ
−
=
−
=
=
∑
∑
=
=
N
n n n N
n n n
x w f
u f s
x w u
脳
れたことからも自明であろう.つぎに,汎化能力とは未学習のデータに対しても適応的に 振る舞うことができる能力のことであり,これも,脳と同機能ととらえることができる.
故障・ノイズに強いことも同様である.(4)の実装容易性は,次節で説明するように,そ 基
ニューラルネットワークは
(1) 教師ありニューラルネットワーク
入力xに対して教師信号yを与えてy=f(x)を学習するネットワークである.人工モデル としては,多層パーセプトロン,リカレントニューラルネットワークなどが挙げられ る.
(2) 教師なしニューラル
入力xの統計的な構造から,その要素や成分を抽出した表現y=f(x)を学習するネットワ ークである.人工モデルとしては自己組織化マップが挙げられる.
− 27 −
(3) 強化によって学習するニューラルネットワーク
出力yに対して与えられる報酬を最大化するように,y=f(x)を探索的に学習するネット ワークである.ただし,必ずしもニューラルネットワークを必要としない.
教師ありネットワークは,生体の脳における小脳の学習をモデル化したものである.同 様に,教師なしネットワークは大脳皮質,強化によって学習するネットワークは大脳基底 核の学習をモデル化したものであ
ニューラルネットワークは,他の探索的学習アルゴリズム(たとえば遺伝的アルゴリズ ム)では学習がうまく進まないようなノイズがある大量のデータ,信号が動的に変化する データに対して適用することができる.
次節では,ニューラルネットワークの学習アルゴリズムについて説明する.
る.
図3.5:多層ネットワーク
− 28 −
3
する[熊沢 98,船久保 91,Bishop 95].
ず,図3.5に示すK層構造を有する多層ネットワークを考える.第k層(k=1,..,K)の j番目のニューロン(ユニット)の出力 は,以下の式で与えられる.
.
こ 式で計算
さ
s w
u
..
t s
E ( )
.誤差逆伝搬法では,Eをこう配法に基づき最小化する:
.3. 学習
本節では,前節のニューラルネットワークの分類に従い,それぞれの学習アルゴリズム を説明する.
3.3.1. 教師ありネットワークの学習アルゴリズム
教師ありネットワークの学習方法として最もよく用いられる誤差逆伝搬法(Back Propagation)について説明
ま
) (k
s
j⎪⎩
⎪⎨
⎧
=
= >
) 0 (
) 0 ( ) ( ( )
) (
k x
k u
s f
j k k j
j
こで,f()は,出力範囲(0,1)で微分可能なシグモイド関数である.
u
(kj )は以下の れる.i
k i k ij k
j
) 1 ( ) ( )
(
ここで,
w
ij(k)は第k-1層のi番目のユニットと第k層のj番目のユニットを結ぶ結線の結 合重みである.なお,u0(k)はバイアスであり,u0(k) =1である.∑
−=
ネットワークの出力si(K)と,教師信号ti との二乗誤差Eは以下となる
∑ −
=
i
i i
K) 2
(
) 1 ( ) ( ) ( )
(k
: =
ijk+
jk ik−ij
w d s
w ε
,− 29 −
=
′ −
∑
≠) ( )
)(
(
) ( )
( )
(
K k s
t u f
K k d
t w u
f j jl l
ここで,ηは慣性項である.
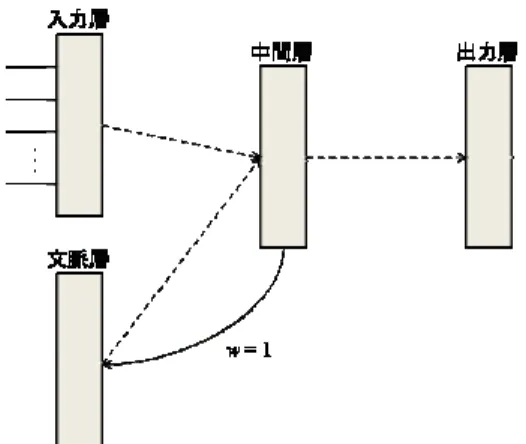
しかしながら,図3.5のような階層型ネットワークでは時系列データを取り扱えない.そ こで,過去の状態遷移状況に依存した出力が得られるSimple Recurrent Network(SRN)
[Elman 90]を,空気を読むためのモデルとして採用する.
図3.6に示すように,SRN は,3層構造を有する階層型ネットワークの入力層と中間層 の間に文脈層を追加した構造を持つ.文脈層と中間層の素子数は等しく,中間層の素子と 文脈層の素子は一対一に対応している.また,SRN では,中間層から文脈層への結合重み 係数は 1 に固定されており,ある時刻での文脈層の情報は,過去の中間層の情報を反映し ている.文脈層に蓄えられた情報は,次の時刻の入力とともに再び中間層に入力される.
このように文脈層という内部フィ で,時系列データを処理できる うになる.SRNは,文脈層を入力層の一部として捉えることで,誤差逆伝播法で学習で る.
⎪⎩
⎪⎨
= ( ) ( )
)
d(
k j j k j k l
j ⎧ ′ (k) (k+1) (k+1) .
ただし,ε は学習率である.ここで,学習効率を向上させ,学習結果を安定させるために,
一般的にはモーメンタム(慣性項)を導入する.具体的には,結合重みの更新に 1 時刻前 の情報を利用することで行う.
時刻tにおける結合重みをw(t)と表記するとき,結合重みの更新は以下の式で行われる.
) ( )
( )
1
(
( ) ( ))
(
t w t w t
w
ijk+ =
ijk+ ∆
ijk ,ただし,
∆ w
ij(k)( t ) = ε d
(jk)s
i(k−1)+ η ∆ w
ij(k)( t − 1 )
.ードバックを加えること よ
き
− 30 −
図3.6:Simple Recurrent Networkの構造
3.3.2. 教師なしネットワークの学習アルゴリズム
事例の正負も評価も与えず,複数概念に対応する事例を与えると,事例間の類似性を手 がかりに自律的に概念の文節表現を構築するのが,自己組織化学習である[AI 05].これに
nenの自己組織化マップ(Self-Organizing Map: SOM)[Kohonen 00, 徳高 99]
ついて説明する.
図3.7にSOMの構造を示す.SOMは入力層と出力層の2層で構成される.出力層上のユ ニットj(j=1,...,N)は,入力層上のすべてのユニットxi (i=1,…, M)と結合いる.SOMは,その結 重み(参照ベクトル)wj=(wj1, wj2,…, wjM)を更新することで学習する.学習時に,自身を
ユ
のユニ に興奮するようになる.
合 を興奮するユ
ットの距離関係に変換するトポロジー保存写像が得られる.具体的な学習の手続きは以
) すべての参照ベクトルwjの要素wjk (k=1,2,..., M)の値をランダムに決定する.
) 入力ベクトルx=(x1, x2,…, xM)を与える.このとき,xとのユークリッド距離が最小となる ユニットc(勝者ユニット)を取り出す.
は,統計的クラスタリング,kd-tree,ID3 などがあるが,ここでは,脳の学習をモデル化 したKoho
に
合
含めた近傍の ニットへは興奮性,その他のユニットには抑制性の参照ベクトルを与える と,最大入力を得たユニットとその近傍の複数 ットが同時
このような局在興奮と競 学習を組み合わせることで,入力空間の類似関係 ニ
下である.
(1
(2
||
||
min
arg
jj
c = x − w
− 31 −
(3) 勝者ユニット,およびその近傍のユニットの参照ベクトルを更新する.
(
j)
cj j
j w h t x w
w := + ( ) −
ただし,hcj(t)は近傍関数であり,学習の進行にあわせて減少させる.
上
傍関数としては,勝者ユニットcの近傍ユニットの集合Ncに対して学習を行うものがあ る.
(4) 以下の式で時刻tを更新し,ステップ(2)に戻る.
t:=t+1.
記の処理により, 類似した参照ベクトルを持つユニットがその周辺に集まる.
近
⎪⎩
⎪⎨ −
ci = T
h ⎧
α
(1 )∉
∈
c c
N i
N t i
0
.
れば,広い範囲が学習対象とな ここで,αは学習率,Tは最終学習時刻である.|Nc| が大きけ
り(大局的な学習),逆に小さければ局所的な学習となる.したがって,Ncも時刻に合わせ て変化させる(たとえば,
| N
c| = β ( 1 − t / T )
となるように集合を設定するなど)ことが一 般的に行われる.そのほかには,ガウス関数を用いた近傍関数もしばしば用いられる:
2 )
||
exp( || 2
2
α σ
jij
w x−
h = − ,
ただし, exp( ) T
−t
=
β
σ
.− 32 −
図3.7:SOMのネットワーク構造
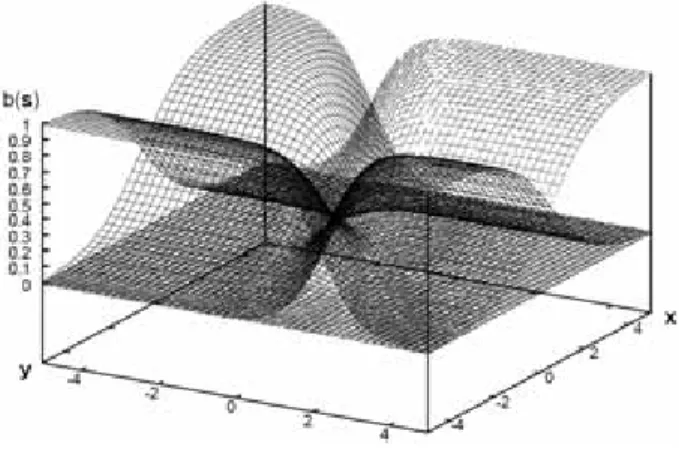
3.3.3. 強化によるネットワークの学習アルゴリズム
,actorと呼ばれる制御
化する行動を選択するように学習する[Kanoh 07].
⎜ +
=
j∑
ij i jj
t u f w b t n t
u ( ) ( s ( )) ( )
.させるためのシグモイド関数である.
t)を以下の 式により算出する.
強化学習法の1つであるactor-critic法を説明する.actor-critic法は
ネットワークとcriticと呼ばれる評価ネットワークで構成される.同手法の構造を図3.8に示
す.actor,criticの学習には基底関数ネットワークを用いる.基底関数ネットワークは図3.9
のように3層構造を有しており,基底関数bi(s(t))を中間層に持つ.基底関数ネットワークを 用いたactor-critic法は,以下の処理を繰り返すことで,criticは価値関数V(s)を正しく推定 し,actorはV(s)を最大
(1) 状態s(t)を環境から観測する.actorは,行動u(t)におけるj番目の行動出力uj(t)を以下の 式により算出する[Gullapalli 90].
⎠
⎞
⎝
⎛
Ni max
ただし,
u
maxj はj番目の行動出力の最大値,b⎟
i()は基底関数,wijはactorの基底関数ネッ
トワークの結合重み,nj(t)はノイズ関数である.また,f()は制御出力を最大制御出力 に収束
(2) criticは報酬r(t)を受けとり,次の状態s(t+1)を観測する.criticは,TD誤差δ(
)) ( ( )) 1 ( ( ) ( )
(t =r t +
γ
V s t+ −V s tδ
.ただし,γは割引率,V(s)は推定価値関数である.
V(s)は,以下の式で求められる.
− 33 −

![図 3.7:SOM のネットワーク構造 3.3.3. 強化によるネットワークの学習アルゴリズム , actorと呼ばれる制御 化する行動を選択するように学習する[Kanoh 07]. ⎜ += j ∑ ij i jjtufwbtn tu()(s())( ) . させるためのシグモイド関数である. t)を以下の 式により算出する. 強化学習法の1つであるactor-critic法を説明する. actor-critic法は ネットワークとcriticと呼ばれる評価ネットワークで構成される.同手法の](https://thumb-ap.123doks.com/thumbv2/123deta/7345777.2435245/33.892.261.635.145.363/ネットワークネットワークアルゴリズムネットワークネットワーク.webp)