この事業は、競輪の補助金を受けて実施したものです。
http://ringring-keirin.jp
システム開発 21-F-2
合成開口レーダを用いた沿岸域の潮流計測・
小型船舶等の検出に関するフィージビリティ スタディ
報 告 書
―要 旨-
平成22年3月
財団法人 機械システム振興協会
委託先:財団法人 資源探査用観測システム・宇宙環境利用研究開発機構
序
わが国経済の安定成長への推進にあたり、機械情報産業をめぐる経済的、社 会的諸条件は急速な変化を見せており、社会生活における環境、都市、防災、
住宅、福祉、教育等、直面する問題の解決を図るためには技術開発力の強化に 加えて、多様化、高度化する社会的ニーズに適応する機械情報システムの研究 開発が必要であります。
このような社会情勢の変化に対応するため、財団法人機械システム振興協会 では、財団法人JKAから機械工業振興資金の交付を受けて、システム技術 開発調査研究事業、システム開発事業、新機械システム普及促進事業を実施し ております。
このうち、システム技術開発調査研究事業およびシステム開発事業については、
当協会に総合システム調査開発委員会(委員長:東京大学名誉教授 藤正 巖氏)
を設置し、同委員会のご指導のもとに推進しております。
本「合成開口レーダを用いた沿岸域の潮流計測・小型船舶等の検出に関する フィージビリティスタディ」は、上記事業の一環として、当協会が財団法人資源探 査用観測システム・宇宙環境利用研究開発機構に委託し、実施した成果をまとめた もので、関係諸分野の皆様方のお役に立てれば幸いであります。
平成22年3月
財団法人 機械システム振興協会
はじめに
光学リモートセンシングについては、すでに高分解能光学センサーを搭載した衛星(フラン スの Spot、米国の Orbview/Ikonos、Quick Bird)が稼働しています。合成開口レーダ(SAR)
についても高分解能 SAR を搭載した衛星が続々と打ち上げられるようになってきました。2007 年以降、ドイツの TerraSAR-X、SAR-Lupe、イタリアの Cosmo/Skymed が打ち上げられ、分解能 1m 前後の高分解能画像を取得できるようになってきました。これらはいずれも周波数 X バンド の SAR であります。
SAR は自分が光学センサーと違い、反射強度以外の反射特性を利用できる特徴を持っていま す。自分で発信する電波を使いますので昼夜を問わず観測でき、電波は波長が長いため雲を透 過することから天候の如何にかかわらず観測できることなどはよく知られていますが、それだ けではありません。電波は波長によっては、対象物の表面だけでなく、森林などの内部まで入 り込んだ上で反射してくること、偏波によって反射特性が異なること、干渉特性を利用できる こと、対象物の反射位相から速度情報などを取り出すことができます。これらにより、光学セ ンサーにはない応用分野が拓けてくることが期待できます。
我が国は、四方を海に囲まれた島国であり平野部も狭いため、沿岸域に政治・経済・産業・
人口が集中しており、沿岸域の防災・海難船舶の捜索・救助・環境などに係わるさまざまな事 象やその変化などを迅速かつ正確に把握できれば、より安全・安心な社会の構築が可能となり ます。
本フィージビリテイスタディ(以下「F/S」という。)では、SAR の高分解能化の実現に広い 周波数帯域幅が得られる高周波バンドが適しており、また高い周波数ほど、事物の視認性が高 まることから、X バンドより高い周波数バンドである Ku バンドの高分解能アロングトラックイ ンターフェロメトリ SAR を使った場合の沿岸域における潮流の面的な速度計測、小型船舶の検 出、陸域低速車両の検出に係わるフライト実験を行いましたのでその結果を報告します。
平成22年3月
財団法人資源探査用観測システム・宇宙環境利用研究開発機構
i
目次
序 はじめに
1.F/S の目的と背景 ··· 1
2.F/S の実施体制 ··· 2
3.F/S の内容 ··· 5
第1章 合成開口レーダの原理 ··· 6
第2章 アロングトラックインターフェロメトリ ··· 13
第3章 観測フライト計画 ··· 17
第4章 潮流計測 ··· 23
第5章 小型船舶および車両検出計測 ··· 31
4.F/S の成果(まとめ) ··· 43
5.F/S の今後の課題および展開 ··· 46
1 1.F/Sの目的と背景
平成 20 年度の「合成開口レーダを用いた沿岸域の潮流計測・小型船舶等の検出に係わる 調査研究」では、欧米で実施されている合成開口レーダを用いた潮流計測実験等について 調査結果や、既存の高分解能 Ku バンド合成開口レーダ(SAR)(注 1、注 2)を活用した Ku バンドインターフェロメトリ合成開口レーダのシステム構成・性能に係る各種シミュレー ション結果を踏まえ、SAR ビームが照射される沿岸域を進行方向と直角の方向から、角度を 変えて 2 回撮像し、照射域の潮流の面的な速度計測(潮流の速度ベクトルやレーダビーム の視線方向速度成分など)手法を検討するとともに、小型船舶の検出に係る調査研究を行 い、航空機搭載実験計画を立案した。
SAR は昼夜天候に拘わりなく広域な地表の観測が可能であるため、SAR の性能・機能、解 析・利用技術の向上に伴い、高分解能な画像の取得や地表の高さとその微小な変化の面的 な観測などがクロストラックインターフェロメトリ SAR により実現されている。これらの 技術により、地下水汲み上げや地下鉄建設などに伴う地盤沈下や大規模構造物の歪の観測、
水力・火力・原子力発電所、石油基地、石油パイプラインなどエネルギー関連施設の立地 調査、保安・防災上の監視、地域多様化に伴う自然と調和した土地利用・開発管理のため の観測など比較的狭い地域の詳細な観測への利用例が見られるようになった。
しかしながら、多くの利用例が見られるようになってきたクロストラックインターフェ ロメトリ SAR でも検出が不可能な、潮流計測や、海上の船舶の速度検出、陸上の低速移動 体の速度検出を可能とするには、進行方向(アロングトラック方向)にわずかに離れた位置 にアンテナを2台配置し、短い間隔で同一場所を二度撮像し、観測域から反射してくる受 信信号を干渉処理し、対象物の移動の有無を示す位相差を抽出し、位相差を速度に変換す ることにより移動体の検出・速度計測が可能となる。
本 F/S では、航空機搭載 Ku バンド合成開口レーダ実験計画書を基に、既存の高分解能 Ku バンド SAR を活用した Ku バンドアロングトラックインターフェロメトリ合成開口レーダの 整備、航空機実験、得られた SAR データを干渉処理し、潮流の 2 次元速度ベクトル図の作 成、小型船舶の検出などを行い、アロングトラックインターフェロメトリ合成開口レーダ の本分野における有効性を実証する。
注1:SAR:Synthetic Aperture Radar
注2:Ku バンド:12~18GHz を言う。航空機では 16GHz 帯、衛星では 13GHz 帯が割り当 てられている。これまでは、衛星では L(1.2GHz 帯)、C(5GHz 帯)、X バンド(10GHz 帯)
が使用されている。
2 2.F/Sの実施体制
(財)機械システム振興協会内に「総合システム調査開発委員会」を、(財)資源探査用観 測システム・宇宙環境利用研究開発機構内に「SAR を用いた沿岸域の潮流計測・小型船舶等 の検出に関する技術委員会」を設置し、その委員会において検討方針・内容などを確認し つつ実施した。
(財)機械システム振興協会 総合システム調査開発委員会
宇宙環境利用研究開発機構
(財)資源探査用観測システム・ 合成開口レーダを用いた沿岸域の潮流計測・
小型船舶等の検出に関する技術委員会 委託
3
総合システム調査開発委員会委員名簿
(順不同・敬称略)
委員長 東京大学 藤 正 巖 名誉教授
委 員 埼玉大学 太 田 公 廣 総合研究機構
教授
委 員 独立行政法人産業技術総合研究所 金 丸 正 剛 エレクトロニクス研究部門
研究部門長
委 員 独立行政法人産業技術総合研究所 志 村 洋 文 デジタルものづくり研究センター
招聘研究員
委 員 早稲田大学 中 島 一 郎 研究戦略センター
教授
委 員 東京工業大学大学院 廣 田 薫 総合理工学研究科
教授
委 員 東京大学大学院 藤 岡 健 彦 工学系研究科
准教授
4
合成開口レーダを用いた沿岸域の潮流計測・小型船舶等の 検出に係わる調査研究委員会委員名簿
(アイウエオ順、敬称略)
委員長 防衛大学校 電気情報学群 情報工学科 大 内 和 夫 学科長
委 員 東北大学大学院理学研究科 川 村 宏 大気海洋変動観測研究センター 教授
委 員 国土技術政策総合研究所 日 向 博 文 沿岸海洋研究部沿岸域システム研究室長
委 員 九州大学応用力学研究所 増 田 章 東アジア海洋大気環境研究センター長
委 員 パシフィックコンサルタンツ株式会社 町 田 聡 総合研究所副所長
委 員 (財)無人宇宙実験システム研究開発機構 三 原 荘一郎 技術本部(調査研究業務担当)グループマネジャ
5 3.F/S の内容
(1)アロングトラックインターフェロメトリ SAR の整備
既存の Ku バンド SAR を活用し、送信系1系統、受信系1系統で、アンテナ2台を高速切 替使用することにより、仮想的に2受信系統を構成するアロングトラックインターフェロ メトリ SAR システムとなるよう整備する。
(2)フライト実証実験
Ku バンドアロングトラックインターフェロメトリ SAR をジェット機に搭載し、フライト 実証を行う。
(3)SAR データ処理と2次元潮流の流速図の作成
SAR データを再生し、干渉処理を施し 2 次元の潮流の流速図を作成する。得られた潮流流 速図を他の潮流計測手段である海洋短波レーダ他と精度検証を実施する。
(4)小型船舶等の検出
小型船舶の再生画像と、電磁回折法(Geometrical Theory of Diffraction 法)による小 型船舶の SAR シミュレーション画像との突き合せ等を図り、Ku バンド高分解能 SAR の有効 性を検証する。
(5)計画およびデータ解析・評価
上記の実証試験データを解析・評価し、当機構が設置する技術委員会にて審議し、その 審議結果を反映し報告書を作成する。
以上の F/S を基に、報告書の第1章においては、合成開口レーダの原理、海洋波の AT-INSAR 2次元画像の生成などについてのアルゴリズムを、第2章においては、SAR アロングトラッ クインターフェロメトリシステムの原理と移動体(潮流、小型船舶、陸域移動車両)の位 相抽出のアルゴリズムなどについてを、第3章においては、既存 Ku バンド SAR を活用した 移動体検出フライト実験について詳細計画を、第 4 章においては、潮流計測について、第 5章においては、小型船舶および陸域移動車両について、SAR アロングトラックインターフ ェロメトリシステムによる航空機実験結果について報告する。
6 第1章 合成開口レーダの原理
1.合成開口レーダの原理[1-1]
RADAR(レーダ)は RAdio Detection And Ranging の略で、機能は目標の検出と距離の計 測である。この機能を更に発展させ、地表面を目標として、レーダ反射強度の2次元分布 を画像として得るのが合成開口レーダ(Synthetic Aperture Radar;SAR)である。SAR は昼 夜を問わず、全天候で観測できるセンサであり、高い空間分解能だけでなく、S/N も大きく 向上するため、現在では衛星あるいは航空機搭載用として使用されている。
SAR は、SAR プラットフォームの移動とともに、マイクロ波のパルスを進行方向と直交す る方向(レンジ方向)に繰り返し発射し、地表で散乱されレーダに戻ってくる後方散乱波 を受信する。
送信パルス(線形周波数変調したリニア FM パルス)の瞬時照射領域は、図 1.1-1 に示す とおり、アジマス方向は SAR と目標からの距離Rとアジマスビーム幅
β
から決まるRβ
と、レンジ方向はパルス幅τと入射角
θ
から決まるcτ
/2sinθ
からなる領域である。
速度 V で進行する SAR と観測領域の位置(x、y)の散乱体を結ぶ直線距離(スラントレ ンジ) r
( )
t′ は、進行方向から発射されたパルス信号が時間t′(アジマス時間 slow time)と すると次式のとおりである。目標=σ0δxδRg
Rβ δx
δRg アンテナ長l
Δθ
cτ/2sin(θ)
R
θ 合成開口長L=Rβ
衛星直下点軌跡
β
図 1.1-1 送信パルスの瞬時照射領域とレンジ分解能δRgおよびアジマス分解能δx
7
( ) ( ) ( )
0 2 0
2 2
0 2R
x t R V x t V R t
r ′−
+
≈
′− +
′ =
(1) 距離
R
0は SAR が散乱体のボアサイト方向に来た時の SAR と散乱体の距離である。レーダから距離 R だけ離れた目標からの後方散乱波は、光速をcとすればパルス送信後
( )
c t r ′
2
の時間だけ遅れて受信される。アジマス方向については、レーダは移動しながらパルスの送信と受信を繰り返し、レー ダの照射域に含まれるある1つの目標はビーム照射期間中ずっと反射波が受信される。こ の間にレーダは地表に対して運動しているため、ドップラ瞬間周波数はプラットフォーム の移動に伴い直線的に変化する線形周波数変調したリニア FM パルスとなる。
つまり、レンジ方向については、目標から散乱されてくる受信波の遅延時間と目標の位 置が1対1に幾何学的に対応するので、受信信号と参照信号(送信パルス)との相互相関処 理(パルス圧縮)することにより目標を高空間分解能および高 S/N で観測ができる。アジ マス方向については、パルス送信後の後方散乱波のドップラ瞬間周波数の変化が、そのま ま目標を走査して戻ってくるまでの距離変化に対応するので、同様に、受信信号とアジマ ス参照信号との相互相関処理(合成開口処理)することにより目標を高空間分解能および 高 S/N で観測ができる。
SAR ではパルス圧縮と合成開口処理により高空間分解能と高 S/N の 2 次元画像を実現して いる。パルス圧縮はレンジ方向に対するもので、一般のパルスドプラレーダにも広く使用 されている。合成開口処理はアジマス方向に対するもので、開口面を合成することにより アジマス方向の分解能を向上させている。パルス圧縮処理と合成開口処理の基本原理は同 じである。
1.2 海洋波の2次元画像の生成[1-1][1.2-1][1.2-2][1.2-3][1.2-4][1.2-5]
従来の SAR を使用し、海面を撮像する場合における海面の 2 次元 SAR 強度画像 I(t) は、
次式で表すことができる。
8
( )
( )
dX x
u V V V
Vt R x x
V t T
I
a
r
a
⎥⎥
⎥⎥
⎥⎥
⎥⎥
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢⎢
⎢⎢
⎢⎢
⎢⎢
⎢
⎣
⎡
′
⎟⎟
⎟⎟
⎠
⎞
⎜⎜
⎜⎜
⎝
⎛
⎟⎠
⎜ ⎞
⎝
⎛ − Δ +
−
′ −
=
∫
−+∞∞ 22
0 2 0
0 0 0
1 2
2 exp )
(
ρ
π ρ
σ
ただし、
( )
21 2
0 2 0
0 4 2 2 2 0
0
2
2 1 1
0
⎟ ⎟
⎠
⎞
⎜ ⎜
⎝
⎛
⎭ ⎬
⎫
⎩ ⎨
⎧ − Δ
+ +
⎟ ⎠
⎜ ⎞
⎝
⎛ − Δ
′ =
R V x V
T a T
V
V
c ra
λ
π τ
ρ ρ
SAR の理論的なアジマス方向の分解能:
0 0 0
0 2VT
λ
Rρ
= 参照関数の速度調整量:ΔV実効的な合成開口時間:
2 2 0 2
1 1 1
a
T
cT = + τ
参考文献
[1-1]大内和夫「リモートセンシングのための合成開口レーダの基礎」東京電機大学出版 局
[1.2-1]システム技術開発調査研究 20-R-3
「合成開口レーダを用いた沿岸域の潮流計測・小型船舶等の検出に係わる調査研究」報告 書 平成 21 年 3 月、財団法人機械システム振興協会 委託先財団法人資源探査用観測シス テム・宇宙環境利用研究開発機構
[1.2-2](Appendix: Derivation of the covariance of the complex radar reflectivity, Theory for Synthetic Aperture Radar Imaging of the Ocean Surface: With application to the Tower Ocean Wave and Radar Dependence Experiment on Focus, Resolution, and Wave Height Spectra, Dayalan P. Kasilingnam, Ocean Research and Engineering, Pasadena, California, Omar H.Shemdin, Jet Propulsion Laboratory, Pasadena, California, Journal of Geophysical Reseach,Vol.93, No.C11, Pages13,837-13,848, November 15, 1988 )
[1.2-3]光安 恒「海洋波の物理」岩波書店
9
[1.2-4]Reconciliation of Theories of Synthetic Aperture Radar Imagery of Ocean Waves,
William J. Plant, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts Journal of Geophysical Research,Vol.97,NO.C5, Pages 7493-7501,May 15,1997
[1.2-5]On the Focusing Issue of Synthetic Aperture Radar Imaging of Ocean Waves Claus Brueing,Werner Alpers, and Jens G. Schroter
IEEE Transaction on Science and Remote Sensing,Vol.29, No.1. Pages 120-128, January 1997
1.3 アロングトラックインターフェロメトリ SAR(AT-INSAR)の原理[1.2-2][1.3-1]
(1)アロングトラックインターフェロメトリ SAR(AT-INSAR)の原理
欧米においては、航空機搭載アロングトラック干渉型 SAR(以下、「AT-INSAR」という。) が開発され、海洋波の表面流、波、内部波の計測が行われている。
アロングトラック方向の干渉型 SAR の基本コンセプトは、航空機に2つの位相コヒーレ ントサイドルックイングレーダ(two phase coherent radars)をプラットフォームの進行 方向にアンテナ2台をある一定の距離に設置する。海面から反射されてきた後方散乱波を 前方と後方の各アンテナにて受信する。その受信信号を
V
1( t )
、V
2( t + τ )
として記録し、独 立に再生処理し2つの画像を生成する。2つのアンテナは同一場所をわずかに遅延した時 間差で2回撮像することになる。これらの2つの複素画像を干渉処理し、単一の AT-INSAR 画像にする。後方の画像は、前方の画像に対しアンテナベースライン長の移動時間( )
vp
2
長 アンテナベースライン
τ
= の違いがある。v
pはプラットフォームの速度である。これらのルック間にて観測される位相変化は、散乱体の速度
v
0によるものであり、次で 表すことができる。理論的には、AT-INSAR の空間分解能と等価な海面速度場を計測するこ とができる。πτ λ τ
2
) ( ) ( arg 2
* 2 1 0
= V t V t+
v (1)
10
図 1.3-1 観測ジオメトリ
位相のアンビギュィテイ範囲は[-π、π]であり、あいまいのないドップラ速度領域は [-λ/4
τ
、λ/4τ
]である。通常の場合、1つのアンテナは送受共用、他のアンテナは受信 専用とする。これにより、前方アンテナと後方アンテナから構成するレーダの物理的な位 相中心は、両アンテナ間の中点となり、実効アンテナベースライン長は半分となる。(2) 複素 AT-INSAR 画像
従来の SAR と同様に、前方アンテナから得られる SAR 画像i−(x)と後方アンテナから得ら れる SAR 画像i+(x)の2つの SAR 画像を干渉処理して得られる SAR 干渉画像
i
−( x ) i
*+( x )
は、次式で表すことができる、この式は AT-INSAR 海洋波画像化モデルの基本式である。
( )
( )
⎪⎭ ∫∫
⎪ ⎬
⎫
⎪⎩
⎪ ⎨
⎧ −
=
=
− +2 1 0 2
2 2
/ 1
*
4 , exp
) ( ) (
T T
v T B
i i I
p
a
x
0x x x
σ π
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ +
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ − −
⎟⎟⎠
⎜⎜ ⎞
⎝
⋅ ⎛ 2
2
2 0 1
0
) 2 , (
exp a
p r
p
p T
T v T B v u
x R R x
jkv x1
( )
⎪⎭
⎪ ⎬
⎫
⎪⎩
⎪ ⎨
⎧ −
−
⋅
20 2
2 1
4
0exp
T v
T v x
p
p
( )
⎭ ⎬
⎫
⎩ ⎨
⎧ ⎟
⎠
⎜ ⎞
⎝
⎛ −
⋅ 2
0exp x x
R
j kB dx
0dT
1θ
i入射角
) (x0−Vt+B
)
(x0−Vt−B R+(x0,t1)
ットP間の伝播距離 後方アンテナ~ターゲ
) , ( t1 R− x0 伝播距離
の ットP~前方アンテナ 後方アンテナ~ターゲ
後方アンテナ 送信・受信 前・後のアンテナ間の中点
前方アンテナ 受信専用
(x0,y0,z0)
ターゲットP
H R
SAR-2
SAR-1
11
ただし、時間
T
aは、次式で与えられ、合成開口時間より常に小さい。2 0 2 2
1 1 1
T T
a=
s+
τ
このモデルの中のu
r( x
0,T
1)
とσ ( x
0,T
1)
は位置x
0と時間T1により変動する。なお、AT-INSAR が計測する潮流速度は、図 1.3-2 に示すとおり、主として、以下の速度 が線形加算されたものである。
図 1.3-2 視線方向の速度成分
真のながれを抽出する場合には、以下の影響を解析的に除去する必要がある。
・流れの速度(海流、潮汐流他が含まれる。)
・局所的な風により誘起される表面流速
概ね風速
U
10の最大 3.5%で見積ることで対応可能である。・重力波の軌道速度
重力波の水粒子は楕円軌道を描きながら運動しており、複数の周期に亘り平均を取れば ゼロになるはずである。しかしながら、ストークスドリフトにより、軌道は閉じず、水 平方向の速度成分が発生する。レーダから見ると、ドップラ周波数変位の要因となるの で、速度バイアスとなる。
・ブラッグ散乱波の位相速度
Ku バンド SAR の周波数は 16.45GHz であり、ブラッグ散乱波の波長は、入射角 60 度で、
約 1cm、位相速度は約 25cm/s となる。
(3) AT-INSAR 速度バンチングモデル
12
SAR の合成開口時間
T
0は、数秒程度(2秒程度)であるが、主要な海洋波の周期は10~15秒程度であり、
u
r( x
0,T
1)
とσ ( x
0,T
1)
は合成開口時間中における変動は小さい等の簡略 化を図り、T1について積分を行うと、複素 AT-INSAR 画像は次式で表すことができる。( ) = ⎪⎩ ⎪ ⎨ ⎧ − ⎪⎭ ⎪ ⎬ ⎫ ∫ ′ ( )
0 0
x x x
p a a
T v
B I T
ρ σ ρ
π 4 ( )
2 exp
2 022 2
0
x
( )
( )
⎪⎭⎪⎬⎫
⎪⎩
⎪⎨
⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
− ′
⎥⋅
⎥⎦
⎤
⎢⎢
⎣
⎡− 2
0 2 2
2
4 2
exp 2
exp v T
u B v jk B
p a
a r
p i
0
0 x
x
ρ
ρ
x
( ) ( )
⎪⎭
⎪ ⎬
⎫
⎪⎩
⎪ ⎨
⎧
⎟ ⎟
⎠
⎞
⎜ ⎜
⎝
⎛ − −
⎟ ⎟
⎠
⎞
⎜ ⎜
⎝
⎛ −
′
0x
0x
p ra a
i
u
v x R R x
jBk
2 0 2
2 1 exp 2
ρ ρ
x
( ) ( )
02 2 0
2
exp u dx
v x R
x
ra p
⎪⎭
⎪ ⎬
⎫
⎪⎩
⎪ ⎨
⎧
⎟ ⎟
⎠
⎞
⎜ ⎜
⎝
⎛ − −
− ′
00
x x ρ
π
ここで、
ρ
a′ ( ) x
0 は劣化したシングルルックのアジマス方向の分解能を表す。( ) ( )
2 / 1
2 2 0 2 2
2
2 ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ +
⎥⎥
⎦
⎤
⎢⎢
⎣ +⎡
′ =
s a r
p a
a
a T v TR
τ π ρ
ρ
ρ
x0 x0アジマス方向の分解能
2 v T
0R
p i a
ρ = λ
AT-INSAR においては、従来の SAR と異なり、ベースライン長Bが入ることにより、視線 方向の速度成分の関数である位相項 exp
⎢⎣ ⎡− 2 u ( ) x
0⎥⎦ ⎤
V
jk
iB
r が式に現われとともに、視線方 向成分の速度によりアジマス方向にシフトしていることを示す速度バンチング項exp
( ) ( )
⎪⎭
⎪ ⎬
⎫
⎪⎩
⎪ ⎨
⎧ ⎟
⎠
⎜ ⎞
⎝
⎛ − −
⎟ ⎟
⎠
⎞
⎜ ⎜
⎝
⎛ −
0 00
´2 2
2 1
2 u x
V x R x R x
jBk
r a
a i
ρ
ρ
が入ることである。Bがなければ、両項はなくなり、従来の SAR と同様の積分となる。
参考文献
[1.2-3]光安 恒「海洋波の物理」岩波書店
[1.3-1]Simulation of Ocean Waves Imaging by an Along-Track Interferometric Synthetic Aperture Radar, Mingquan Bao,Claus Bruning, and Werner Alpers, IEEE Transaction on Geoscience and remote sensing,Vol.35,May,1997
13
[1.3-2] Delyn Moller and Stephen J.Frasier, Robert E. McIntosh (University of Massachusetts), David L. Porter (John Hopkins University)
Radar-derived interferometric surface currents and their relationship to subsurface current structure
Journal of Geophysical Research Vol.103,NO.C.6,Pages 12839-12852,June 15,1998
[1.3-3]Dual-Beam Interferometry for Ocean Surface Current Vector Mapping、Stephen J.Frasier, Adriano J.Camps, Vol 39,No.2,2001,IEEE
第2章 アロングトラックインターフェロメトリ[1.2-1]
2.1 ATI 観測の原理
ATI(Along Track Interferometry)観測とは、時間的に異なる 2 ペアの SAR データを用 い、2 つの画像の位相差を抽出することで、地表面の視線方向の速度成分を抽出する技術で ある。図 2.1-1 に ATI の概念図を示す。
スラントレンジ方向の移動速度を検出
画像 1 画像 2
干渉画像 作成
移動目標抽出 レンジ方向速度成分抽出
ATI 処理
ターゲット
2枚の画像の位相差 ∝ タイムインターバルにおけるターゲットの移動距離 ∝ ターゲット速度 図 2.1-1 ATI の概念図
2.2 ATI 観測用 Ku 帯 SAR の構成
既存の Ku バンド SAR を活用し、送信系 1 系統、アンテナ 2 台、受信系 1 系統から構成さ れるアロングトラックインターフェロメトリ SAR システムのブロック構成図を、図 2.2-1 に示す。一般に ATI による移動目標観測を行う場合には、2ch の受信系で同時観測すること が望ましいが、受信機とデータレコーダ(DR)のコストインパクトを考慮し、今回は 1ch
14
の受信系で観測するシステムの検討を実施した。図 2.2-1 において、赤い点線枠で囲った 部分が、アロングトラックインターフェロメトリを実現するためのハードウェア改修部分 を示す。
図 2.2-2 には、アロングトラックインターフェロメトリ SAR システムを航空機へ搭載し た状態を示す。表 2-1 にシステムの諸元を示す。
地上解析装置
記録データ 記録データ 励振部
受信部 送信機
記録部
動揺センサ
信号処理部
POS/AV
アンテナ切り替えスイッチ
送信の漏れこみ防止スイッチ
今回の改修部分
図 2.2-1 システムのブロック構成図
40cm 40cm
図 2.2-2 試験フライト用航空機
600MHz 送信帯域幅
送信尖塔出力 300W
16.45GHz 送信中心周波数
600MHz 送信帯域幅
送信尖塔出力 300W
16.45GHz 送信中心周波数
表 2-1 システムの緒元
15 2.3 観測パラメータ検討
ATI 用 Ku 帯 SAR システムで ATI 観測を実現するための観測パラメータについて、パルス 幅、プラットフォーム速度、PRF はドップラー周波数帯域幅の制約、DPCA 条件の制約、Duty およびデータレートの制約を全て満足する必要があることから、観測パラメータは次のと おり設定した。
・パルス幅 10μsec
・飛行速度 100~110m/s
・PRF 4500~4950Hz
また、海上を移動する小型船舶を ATI 観測で検出するためには、小型船舶の移動で生じ る位相差ΨATI と潮流の移動で生じる位相差が異なる必要がある。ここでは、移動目標の移 動に応じて生じる位相差について解析し、検出可能な小型船舶の速度について検討する。
式 2.3-1 に示す関係式に基づき、移動目標と位相差の関係を算出した結果を図 2.3-1 に示 す。なお、ここで前提としたシステムパラメータを表 2-2 示す。
位相差とターゲット速度の関係
λ θ
ψ
4π
sinGND p
baseline
ATI v
V B ⎟⎟
⎠
⎞
⎜⎜
⎝
= ⎛ 式 2.3-1
16
-10 -8 -6 -4 -2 0 2 4 6 8 10
-200 -150 -100 -50 0 50 100 150 200
V
G: Ground track velocity [m/s]
P h as e [d eg ]
朝日礁での潮流 最大2.4ノット(1.2m/s)
船舶の速度
2~4m/s(=4~8knot)
82°
-10 -8 -6 -4 -2 0 2 4 6 8 0 ターゲット速度VGND[m/s]
200 150 100 50 0 -50 -100 -150 -200
位相差[deg]
潮流の位相差範囲
-10 -8 -6 -4 -2 0 2 4 6 8 10
-200 -150 -100 -50 0 50 100 150 200
V
G: Ground track velocity [m/s]
P h as e [d eg ]
朝日礁での潮流 最大2.4ノット(1.2m/s)
船舶の速度
2~4m/s(=4~8knot)
82°
-10 -8 -6 -4 -2 0 2 4 6 8 0 ターゲット速度VGND[m/s]
200 150 100 50 0 -50 -100 -150 -200
位相差[deg]
潮流の位相差範囲
図 2.3-1 ターゲット速度と位相差の関係 表 2-2 パラメータ検討の前提
使用SARシステムをベース 60 [deg]
Θ オフナディア角
Ku帯(中心周波数:16.45GHz) 0.018[m]
λ レーダ波長
100 [m/s]
0.2 [m]
値
潮流または小型船舶 VGND
ターゲット速度
GulfstremIIがプラットフォーム Vp
プラットフォーム速度
使用SARシステムをベース Bbaseline
ベースライン長
根拠
使用SARシステムをベース 60 [deg]
Θ オフナディア角
Ku帯(中心周波数:16.45GHz) 0.018[m]
λ レーダ波長
100 [m/s]
0.2 [m]
値
潮流または小型船舶 VGND
ターゲット速度
GulfstremIIがプラットフォーム Vp
プラットフォーム速度
使用SARシステムをベース Bbaseline
ベースライン長
根拠
想定する観測エリアでの潮流の最大速度は 2.4 ノット(1.2m/s)であることから、船舶の 移動による位相差と潮流の移動による位相差との区別を明確化するため、船舶の速度を 2
~4m/s とする。
17 第3章 観測フライト計画[1.2-1]
3.1 計画概要
航空機は小牧空港から離陸し、渥美半島の先端付近に位置する伊良湖水道上空へ移動し、
次の 3 つの観測を行う。
(1)潮流計測
伊良湖水道灯浮標近傍(灯浮標の位置:北緯 34°34.05、東経 137.00.21)における潮流 の計測を実施する。伊勢湾海上交通センターが公開している伊良湖水道潮流曲線より得た 潮流が最も速くなる時間における観測データを取得する。現地における潮流速度は、簡易 GPS を搭載した簡易流速測定装置を用いて行う。
(2)小型船舶検出
簡易 GPS を搭載した小型船舶を伊良湖水道浮標近傍において運行し、移動する小型船舶 の観測データ取得を行う。
(3)陸域移動車両検出
陸域移動車両については、2 台の車両を活用し検出する。走行サイトは伊良湖漁港近傍の 一般道および農道とする。速度は小型船舶と同一速度とし、方向はビーム方向に対し 90 度 および 45 度に傾いた方向を目安とする。
3.2 観測サイトと飛行コース設定 3.2.1 観測サイト
(1) 潮流計測・小型船舶検出
図 3.2-1 に、潮流計測および小型船舶検出の観測サイトを示す。海図上の赤丸は、潮流 計測・小型船舶検出の観測サイトである朝日礁を示す。
18
朝日礁 潮流
図 3.2-1 潮流計測・小型船舶検出の観測サイト
(2) 陸域移動車両
図 3.2-2 に陸域移動車両の観測サイトを示す。図中の白枠は、レーダビームの観測幅を 表す。走行距離を確保可能な一般道および農道について現地調査を行い、候補 1 および 4 の一般道を走行サイトに定めた。移動速度は 4m/s ≒14km~15km/h 程度を目安とする。
観測中心のライン
460m
1 4
観測中心のライン
460m
1 4
図 3.2-2 陸域移動車両の観測サイト 3.2.2 飛行コースの設定
図 3.2-3 に飛行コースの設定を示す。
①②③④の飛行コースはそれぞれ 2 回飛行し、計 8 回観測する。潮流と小型船舶の観測 は同時に実施し、パス①と②では、陸域移動車両の観測も併せて実施する。
19 フライト順は次のとおりである。
① →②→①→②→③→④→③→④
図 3.2-3 飛行パス 3.3 観測方法
アンテナパターンの影響により、本観測フライトでは、観測幅(スワス幅)が約 450m に 制限される。小型船舶および陸域移動車両検出の観測は、この観測幅の制限を考慮して実 施する必要がある。以下、小型船舶および陸域移動車両観測を実現するための観測方法を 記す。
3.3.1 航空機と移動目標の同期
小型船舶および陸域移動車両検出の観測では、移動する目標を、航空機と伴に移動するレ ーダビームフットプリントで捉えるため、航空機と移動目標との同期が必須である。
図 3.3-1 に、この航空機と移動目標の同期方法を示す。
20
①3分前に目標地点の到着時刻を 航空機から船舶へ連絡
目標パス
②電波を照射し観測を開始 目標地点到達の数十秒前
③目標地点に到達し 小型船舶を観測
④電波照射をやめ観測を終了 目標地点通過の数十秒後
⑤次の観測の準備開始
航空機の目標地点
(1)航空機から連絡を受け移動準備 (2)目標地点に向け移動、
航空機を目視確認 (3)目標地点を所定速度で通過 (4)観測終了まで航行を続行 (5)次の観測の準備開始
船舶の目標 地点
航空機の動き
観測領域
2~3km
450m
小型船舶の動き
船舶は目標地点 付近を周回する
①3分前に目標地点の到着時刻を 航空機から船舶へ連絡
目標パス
②電波を照射し観測を開始 目標地点到達の数十秒前
③目標地点に到達し 小型船舶を観測
④電波照射をやめ観測を終了 目標地点通過の数十秒後
⑤次の観測の準備開始
航空機の目標地点
(1)航空機から連絡を受け移動準備 (2)目標地点に向け移動、
航空機を目視確認 (3)目標地点を所定速度で通過 (4)観測終了まで航行を続行 (5)次の観測の準備開始
船舶の目標 地点
航空機の動き
観測領域
2~3km
450m
小型船舶の動き
船舶は目標地点 付近を周回する
図 3.3-1 航空機と移動目標の同期 3.3.2 小型船舶の操舵
図 3.3-2 に小型船舶の操舵方法を示す。
・2隻は共に同じ船跡を航行する。副船は位相 90 度遅れて、距離にして 200m 遅れて主船 を追う。
・2隻とも対地速度 8 ノット程度とする。
上記よりジェットの到着時刻をあまり意識しなくても、少なくとも一艘は必ず観測域に入 る。
21
観測域 幅400m
主船 副船
潮流:満ち潮2ノット ジェット機
ジェット機
:浮標 図 3.3-2 小型船舶の操舵方法
400m/8 ノット=400m(観測幅)/4m/s=100S・・・・・片道 100 秒 方向転換に 10 秒程度を要すると予想される。
3.5 グランドトゥルース計測
ATI 観測より推定した移動目標速度の検証を行うため、観測フライトでは移動目標速度の グランドトゥルースを計測する。以下、その計測方法について述べる。
3.5.1 小型船舶および陸域移動車両の速度
小型船舶および陸域移動車両の速度は、小型 GPS ロガーを搭載することで取得した移動 履歴より算出する。
小型 GPS ロガーの例(写真と仕様)
図 3.5-1 に例となる小型 GPS ロガーの概観を示す。
22
図 3.5-1 小型 GPS ロガー
http://www.gpsdgps.com/menu/index_gps_logger.htm
3.5.2 潮流速度
潮流速度のグランドトゥルース計測方法として、図 3.5-2 および図 3.3-3 に示す GPS ロ ガーを搭載した簡易流速測定装置を作成し、測定した。
図 3.5-2 簡易潮流流速測定装置
23
図 3.5-3 簡易潮流流速測定装置による測定
第4章 潮流計測
4.1 潮流 SAR 画像
表 4.1-1 に観測データの一覧を示す。
表 4-1 観測データ一覧
データ番号 飛行コース 観測時刻 観測結果
1 ① 13時30分00秒~13時31分13秒 良好 2 ② 13時37分36秒~13時38分55秒 良好 3 ① 13時45分52秒~13時47分43秒 良好 4 ② 13時56分37秒~13時57分53秒 良好 5 ③ 14時09分15秒~14時10分13秒 良好 6 ④ 14時32分52秒~14時34分02秒 良好 7 ③ 14時41分52秒~14時43分06秒 良好 8 ④ 14時51分14秒~14時52分22秒 良好
そして、図 4.1-1 と図 4.1-2 にフライト観測により得た SAR 画像例を示す。
24
図 4.1-1 SAR 画像例(データ番号1)
25
図 4.1-2 SAR 画像例(データ番号2)
26 4.2 2 次元干渉画像
図 4.2-1 に 2 次元干渉画像例を示す。同干渉画像は、SAR 画像 1 と SAR 画像2の組み合せ により作成した。
図 4.2-1 干渉画像例
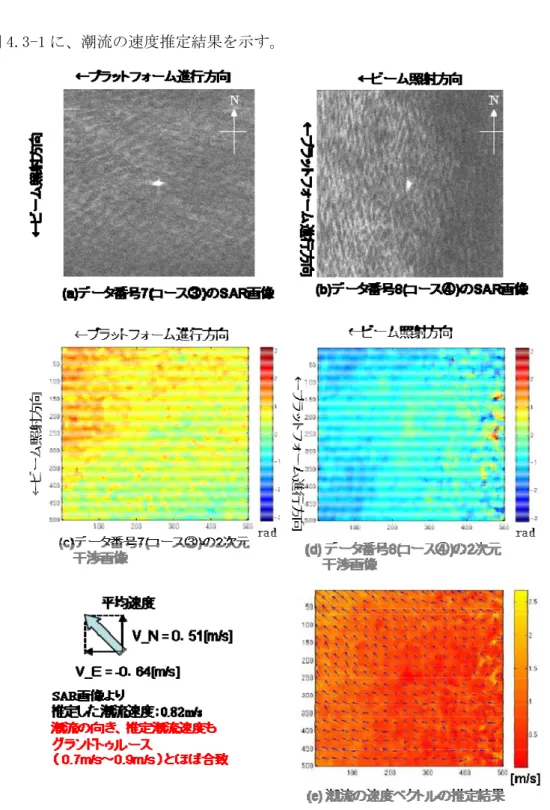
27 4.3 潮流の速度推定および評価
4.3.1 潮流の速度推定
図 4.3-1 に、潮流の速度推定結果を示す。
図 4.3-1 潮流速度の推定結果
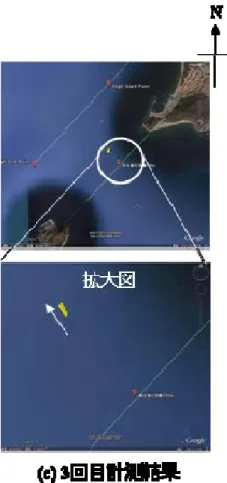
28 4.3.2 潮流のグランドトゥルース
図 4.3-2 に、GPS ロガーによる潮流計測結果を示す。
表 4.-2 に、GPS ロガーによる潮流の速度計測結果をまとめる。
表 4-2 潮流の速度計測結果
時刻 潮流速度、向き
1 回目 12:37:18~12:38:23 0.5 m/s = 0.9 knot、北西から南東 2 回目 14:02:18~14:03:18 0.7 m/s = 1.4 knot、南東から北西 3 回目 15:01:48~15:02:53 0.9 m/s = 1.7 knot、南東から北西
衛星画像:(c) GoogleTM
図 4.3-2 GPS ロガーを用いた潮流の計測結果
2 9
30 4.3.3 速度推定結果の評価
4.3.1 章に示した SAR 画像からの潮流の速度推定結果(図 4.3-1(e))より、推定された 速度ベクトルの向きは、局所的にばらつきがあるものの、全体のトレンドとしては、北西 向きであることが読み取れる。実際に、300m 四方の領域内の平均速度ベクトルを求めると、
北西向き 0.82m/s であった。4.3.2 章に示した潮流のグランドトゥルースの値は北西向き 0.7m/s~0.9m/s であったことから、良く一致していると言える。
31 第5章 小型船舶および車両検出計測
5.1 小型船舶シミュレーション[1.2-1]
5.1.1 小型船舶のモデル
伊勢湾・三河湾にて操業している標準小型漁船を対象とし、小型船舶の3D モデル化を図 った。用船する小型船舶(漁船)は、愛知県蒲郡市蒲郡漁業協同組合西浦支所に所属し、
同支所より提供された図面を基に作成した3D モデルを用いて、 船体が FRP 素材であるこ とを前提に RCS シミュレーションを実施した。表 5.1-1 に、3D モデルの緒元を示す。また、
図 5.1-1 に3D モデルの俯瞰図を示す。
表 5.1-1 小型船舶3D モデル緒元
面の数
3388 3
最大約0.3m(船体部) メッシュの粗さ
2
全長:約
17m
全幅:約3m高さ:約
1.8m(
船体部) 1
サイズ備考 値
No
項目面の数
3388 3
最大約0.3m(船体部) メッシュの粗さ
2
全長:約
17m
全幅:約3m高さ:約
1.8m(
船体部) 1
サイズ備考 値
No
項目図 5.1-1 3D モデル 俯瞰図
32
また、図 5.1-2 に、モデルとなった実際の小型船舶の写真を示す。
図 5.1-2 小型船舶の例 5.1.2 シミュレーション結果
シミュレーションパラメータを表 5.1-2 に示す。ここでは、昨年度に実施した RCS シミ ュレーションと同様に、H 偏波および V 偏波でビーム照射方向の方位角を変更した場合と、
分解能を変更した場合の解析結果を示す。図 5.1-3 と図 5.1-4 に、3D モデルの座標軸とビ ーム照射方向の関係を示す。
表 5.1-2 シミュレーションパラメータ
考慮なし 海面反射
6
繊維強化プラスチック モデルの特性
7
H or V 観測偏波
4
考慮なし マルチパス
5
10cm / 30cm / 1m 空間分解能
2
60deg 観測入射角
3
16.45GHz(Kuバンド) 観測周波数
1
値 項目
No
考慮なし 海面反射
6
繊維強化プラスチック モデルの特性
7
H or V 観測偏波
4
考慮なし マルチパス
5
10cm / 30cm / 1m 空間分解能
2
60deg 観測入射角
3
16.45GHz(Kuバンド) 観測周波数
1
値 項目
No
33
図 5.1-5 と図 5.1-6 に、シミュレーション結果を示す。
後方散乱断面積は、入射角 60°で見込んだ場合に、上記シミュレーション結果では、方 位により-28dB~10dBsm となり、平均で-5dB 程度となった。
なお、今回のフライトでの船舶に対するビーム照射方向(正面方向からの照射)では、RCS は約 10dBsm となる。30cm 分解能を前提とすると、船舶の画像は 2~3000 点程度の輝点(分 解能セル単位)の集合となることから、分解能セルあたりの RCS は約-25dBsm/分解能セル 程度と予想される。雑音等価散乱係数 NESZ(Noise Equivalent Sigma Zero)の目標値を-20dB 程度とした場合、ノイズレベルは-30dBsm/分解能セルとなる。よって、船舶画像の輝点の SN は約 5dB 以上となる。輝点あたりの SN が高くないことから、マルチルック処理を施し SN を改善する。
また、他の船舶との識別のためだけでなく、検知ができない場合のリスク回避のために も、コーナリフレクタを搭載した。
また、昨年度のシミュレーション結果と同様の次の結果を得た。
・観測偏波(H/V)の違いによる船舶のレーダ画像の比較から、今回のターゲットとした小 型船舶については、レーダ画像上において観測偏波による明確な違いは確認できなかっ た。
・空間分解能の違いによるレーダ画像の比較から、小型船舶において船上の構造物の形状 を把握するためには、30cm~60cm 程度の分解能が必要である。
Z軸 θ:入射角 ビーム照射方向 Z軸
θ:入射角 ビーム照射方向
図 5.1-3 ビーム照射方向とZ軸方向の関係
34
φ:方位角
ビーム照射方向 X軸
Y軸 φ:方位角
ビーム照射方向 X軸
Y軸
図 5.1-4 ビーム照射方向とX軸方向の関係
FRP: Fiber Reinforced Plastics
比誘電率設定 4.8 参考 ガラスエポキシ 4.5~5.2 誘電損失 0.02 参考 ガラスエポキシ 0.02
層厚 20mm 参考 船の鋼板の厚さはおよそ30mm ※1
H偏波
アジマス
V偏波
レンジ
アジマス
レンジ
アジマス
レンジ
アジマス
レンジ
ビーム照射方向
0deg 30deg 60deg 90de 120deg 150deg 180deg
・方位角の変化によりターゲットの形状は異なる。
・ レーダ画像において、観測偏波による明確な違いは確認できない。
図 5.1-5 H 偏波および V 偏波でビーム照射方向の方位角を変化させたシミュレーション結果
シミュレーション条件 入射角:60°
空間分解能:30cm
3 5
アジマス
レンジ
アジマス
レンジ
シミュレーション条件
・入射角:60deg
・方位角:45deg
・観測偏波:H偏波
空間分解能: 10cm 30cm 60cm 1m
・60cm 以下の空間分解能により、小型船舶の大まかな構造の把握が可能
・30cm 以下の空間分解能により、小型船舶の詳細な構造の把握が可能
図 5.1-6 分解能を変更した場合のシミュレーション結果
3 6
37 5.2 小型船舶および車両の SAR 画像
図 5.2-1 に、小型船舶の画像例を示す。図 5.2-2 に、車両の SAR 画像例を示す。
図 5.2-1 小型船舶の画像例
38
図 5.2-2 車両の SAR 画像例
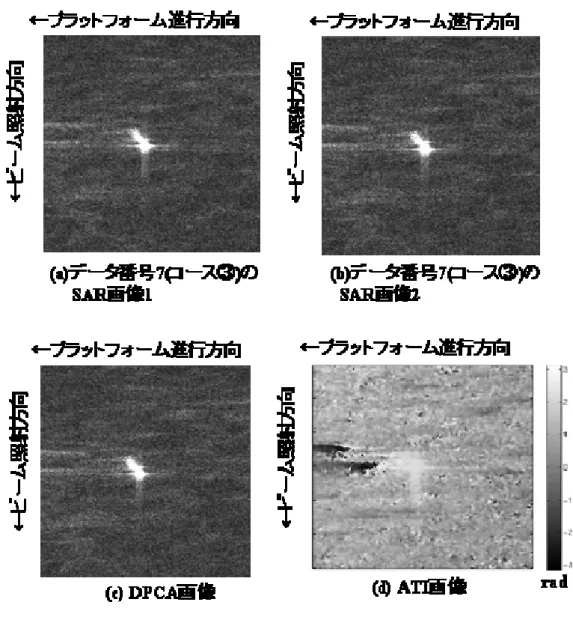
39 5.3 小型船舶検出
5.3.1 小型船舶の検出結果
図 5.3-1 に、小型船舶の検出画像例を示す。
図 5.3-1 小型船舶の検出画像例
40 5.3.2 シミュレーション画像との突合せ
図 5.3-2 小型船舶の SAR 画像とシミュレーション画像を付き合わせた結果を示す。
なお、シミュレーション画像では、小型船舶と海面間の 2 回反射は考慮していないため実 SAR 画像とシミュレーション画像間に 2 回反射に相当する部分で差異がある。
図 5.3-2 SAR 画像とシミュレーション画像の突合せ
41 5.4 車両検出
5.4.1 検出目標車両
図 5.4-1 に、検出目標とした車両、および、同車両の走行車線を示す。
(a)
コース1
の車両(b)
コース4
の車両(c)
コース1 (d)
コース4
(e)
コース1 (f)
コース4
図 5.4-1 観測目標車両および走行車線
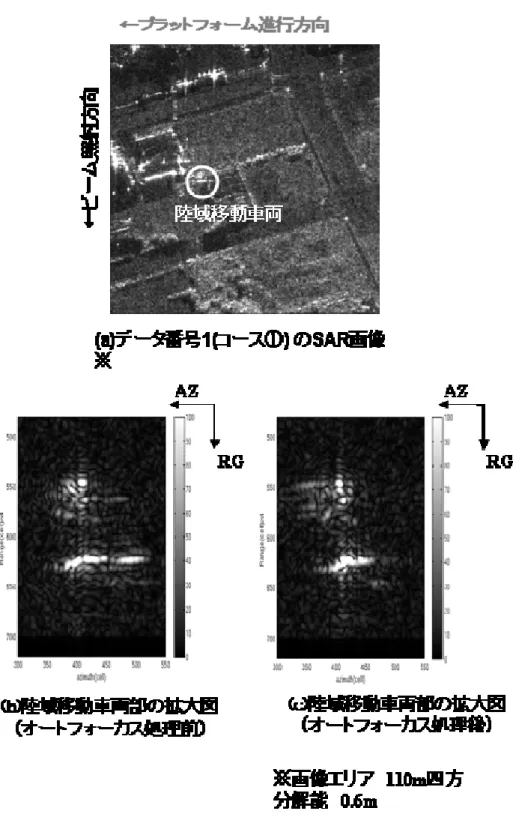
42 5.4.2 車両の検出結果
図 5.4-2 に車両の検出画像例を示す。
コース 1 の車両の車種は、日産キューブで、全長 3730~3750mm、全幅 1670mm、全高 1640mm であり、コース 4 の車両の車種は、日産バネットで、全長 3995mm、全幅 1635~1690mm 全高 1880~1930mm である。ここでは、コース1の車両の検出を行った。
図 5.4-2 車両の検出画像例
43 4.F/S の成果(まとめ)
航空機は愛知県営名古屋空港を離陸し、伊勢湾・三河湾の湾口の伊良湖水道にある朝日 礁灯浮標の近傍の潮流、小型船舶の速度検出、および航空機の飛行コースに沿った公道を 走行する低速移動車両の速度検出を行った。
その結果は以下のとおりであり、AT-INSAR による移動体の検出が可能であることを実証 した。
(1) 潮流速度計測
AT-INSAR で得られた潮流速度は、約 0.82m/s であった。海上保安庁第 4 管区伊勢湾海 上交通センターが公開している当日の潮流推算値は、図 4.1 潮流覆域図に示すとおり、伊 良湖水道における「流れ」は 1.0~2.0 ノット(0.5~1m/s)と予想されていた。この「流れ」
の速度は、水深 5m の速度である。
図 4.1 潮流覆域図
実験当日の伊良湖水道における気象状況を表 4.1 に示す。伊良湖水道の 13:20~14:50 における平均風速は、約 3 m/s であり、この風により海面に惹起される表面流速は、内外 の研究者の観測実績データ等から風速の 2.5~3.5%相当を見込めば良いという知見が得 られており、約 0.1m/s が加算されていると思われる。
44
表 4.1 実験当日の伊良湖水道の気象状況
出典:気象庁 気象統計情報
また、ブラッグ散乱波の位相速度
v
pは、内外の研究者の観測実績データ等から風向の 依存性は小さいことから、理論式から 25cm/s が線形加算されている。
ρλ
λ π π
T
v
Pg 2
2 +
=
cm m kg
N T
1 / 1000
10 72
9.8m/s
3 3
2
=
× − λ ρ さざ波の波長
: 水の密度
: 表面張力 重力の加速度:
これらを踏まえ、概ね ATI-INSAR が検出した速度と整合している。
(2) 小型船舶および陸域移動車両の検出
45
小型船舶は、愛知県蒲郡市西浦漁業協同組合西浦支所に所属する船舶を用船し
た。その結果、SAR 画像から小型船舶の船形を検出することができ、シミュレーション画 像との突き合わせは良好に行うことができた。速度情報については、AT-INSAR による 2 枚 の画像から位相情報を抽出し、速度情報に変換した結果、検出した速度は、12.1km/h であ った。一方、小型船舶に搭載した GPS ロガーが計測した速度は 11.3km/h であった。こらか ら、正確な速度検出が可能であることを確認した。
陸域移動車両についても、同様な処理を行い、AT-INSAR が計測した速度は 10.4km/h であ り、GPS ロガーが計測した速度は 10.9km/h であり、両者の速度はほぼ正確であることを確 認した。