τ庖e JaPαnese Journal of Ps
.
ン.
chonomic So加η(tE2DO7
.
V〔}1、
26,
No.
1,
ll−
19圃
視覚
と
触覚
を
用
いた
物体
認
識
に
お け
る
視
点独 立 性
上 田 祥 行
・齋 木
潤
京 都 大学
Viewpoint
independence
in
visual
and
haptic
object
recognition
Yoshiyuki
UEDA
and
Jun
SAIKI
Kyoto
L
「niversit),*Visual object recognition uses both viewpoint speci fic and invariant information
.
In this studywe
investigated
what types of information were used when visua ]]ylcarned oblects were recog−
nized by haptics
,
and vice versa.
First
,
a novel3−D
oblect was prcsented,
either visually orhaptically
, with five viewpoints along its vertical axis.
This wasfollowed
by
a series o工recognit 三〇ntests
in
which the test stimuli were presented either visually or hapticatly fr(,m various viewpoints,
The participants then indicated whether the tcst stimuli were,
or were not,
the same as the obゴect presented earlier,
In Experimcnt l the participants were told the test modalitybefore
the nove 旦object was prcscnted
,
The recognition performance of the participants showcd a viewpoint invariance across modalities,
whereas thelearned
vlewpoint showed an advantage within amodality
.
In Experiment 2,
and without theknowledge
of the test modality,
the performance of the participantsboth
within,
and across,
modalities showed a viewpoint invariance.
These resultssuggest that viewpoint
−
indcpendent information alone is available for object recognition across modalitics,
whereas viewpoint−dependent
information
also becomes available for recognition within a rnodality when the test modal 量tyis
known
bcforc
the novel (エbject
is
presented.
Key words ;object recognition
,
view−
indcpendent representation,
view−
dependent representation,
cross
−
rnoda !ity問 題
”
見る こと と触る こ とは同じ情報を得る こと がで き る 二 っ の 手 段で あ る”
と Gibson (1979 )が 述べ たよ うに,
我々 は視 覚で記憶し た物体を触覚で認 識 した り,
その逆 に触 覚で記 憶し た物 体を視 覚で認識 し た り す るこ と がで き る.
あ る感 覚で記 憶 した物 体 を 異なる感 覚に よ っ て も 認識で き るこ と は非 常に興味深い能 力で あ る.
物 体の 認 識は,
知 覚し た物 体と記 憶に蓄え ら れ た物 体の 表 象を 照 合 するこ とで 行 わ れる と考えられて いる 〔BUIthoff & Edelman,
1992).
視 覚 にお け る 二 次 元物 体の脳内 表 現 にっ い ては,
これ まで に さ ま ざ ま な 理論が提 唱さ れて お り,
そ れ ら の立場は大き くr一
っ に分けられる.
一
方は,
* Graduate Shool of Human and Environmental Studies
,
KyotoUniversity
,
Yoshlda
Nihonmatsu −
cho
,
Sakyo −ku,
Kyoto
606−8501
.
一
般 化 円 錐に代 表さ れるよ う な ;次元モデ ル によ る脳 内表 現 (Marr & Nishihara
,
1978)や,
ジ オ ン (geon
)と呼ばれ る単純な 三 次元形状に よ る構 造 記 述 (Biederrnan
,
1987)を 用 いた 視 点 と は 独 立 し た表現で二次元物 体を表 現 して い る とする立 場で ある
.
も う.
一
一
方は,
二次 元イメ
ー
ジ表 象に よ っ て 視 点 に依 存 した表現 を し て い る(BUIthoff & Edelman
,
1992;Tarr
&Bttlthoff
,
1995
)と い う立 場で ある,
物 体が回 転 して も物 体を構 成 する ジオ ンが 遮蔽に よっ て 見 え な く な ら ない限りは視 点に独 立し た認 識が uJ能だっ
たこ と か ら,Bieder
皿an &Gerhard−
stein (1993)は前 者の理 論を支 持した,
これに対 し,
後 者の 理論を支持す る もの と し て,
物 体 を 学 習し た視 点か ら再認 す る場 合は異な る視 点か ら再認する場 合に比べ て 再 認 率や再 認 時 間が良く な るこ と が 知 ら れて い る(Edel−
man & BU!thoff,
1992),
両者の理 論の妥 当性を倹 討 す る ため の研 究が盛ん に行 わ れて きた が,
物 体の認識があ る場 合は視 点に依 存 的で,
あ る場 合は視 点に独立的にな12
某 礎 心 理 学 研 究 第 26巻 第 1号 るこ と か ら (Foster
&Gilson,2002
;仁科・
乾,1996
; Tarr & BUIthoff,
1995),
近 年で は視覚にお ける物 体認 識の表現 は, 単一
一
で は な く両方の表 現を併せ持っ理論が 必 要で あると提 唱されて い る (Hayward,
2003 ).
しか し,
我々 は視 覚の み で物 体を認 識するわ けで はな い.
視覚で物 休を 記憶し触覚で認識す る,
あ るい は触 覚 で物 体を記 憶し視 覚で認 識するとい う よ うに異な る 感覚 で物 体を記 憶・
認 識 する際に は,
視 覚で用い ら れて い る と 考え ら れてい る視 点に独 立 した表 現 と依 存 した表 現の ど ち ら が用い ら れてい るの だ ろ う か.
こ の 問 題に対 する・
っ の答え と して NewelL Ernst,
Tjan,
& BUIthoff (2001 )の研究が挙げ ら れる.
Newellet al:(
2001
)は異種感覚で用いる情 報が視点 独立的なの か視 点 依 存 的なのか とい う問い に答え るた めに,
LEGO (LEGO 社 製 )を 川 い て作 製 し た新 奇 物 体を 用い て同 種 感 覚 内お よ び 異種感 覚 問での物 体の再認成績を 測定 し た.
実 験で は,
視 覚 もしくは触 覚を用い て物 体の形 状を 学 習させ,
そ の後に学 習 した視 点と同 じ視 点 (0° 回 転 条 件 ),
あ るいは新 奇な視 点 として学 習 し た視 点か ら180u
回 転 (180°
回 転 条 件 )さ せ た視 点か ら再 認 する課 題を 行 っ た,
Newell et al.
(2001 }は ヒ ト の身 体 的な制 約か ら,
視 覚は物 体の 表 側か らの認識が得 意.
で あ り,
触 覚は 物 体の裏 側か らの 認識が得意で あ る と考え た.
この仮 説 に従う と,
視 覚で物 体を認 識 する際の表 側と触 覚で物 体 を認識す る際の裏 側が一
致 する と き に異 種 感 覚 問で の再 認が促 進さ れ る とい う視 点依存 的な再 認成績が予測 さ れ る.
実 験の 結 果,
180°
同 転 条 件で物 体を 垂直 軸 (verticalaxis)中 心や水 平 軸 〔h‘)rizontal axis)中 心に回 転させ た と き
,
1
司一
一
感 覚 再認では 0° 回転条件の冉認率が 180° 回 転 条 件の再 認 率よ りも高かっ
た.
これに対 し,
異 種 感 覚 再 認で は 180°
回 転 条 件の 再 認 率が 0°
回 転 条 件の再 認 率 よ り も高かっ た,
こ の 二っ の回転条 件 は 学 習 時 と 冉 認 時 で180
°同転し た場 合に物体の表裏が入れ替わ っ て,
視 覚で物 体を認識 する際の表 側と触 覚で物 体を認識する際 の裏 側が一
致す るよ うな回転であ っ た.
また,
前額 並行面 内で 180°回 転さ せ た場 合 〔rotation with
depth
axis )で は
,
同・
感 覚,
異 種 感 覚の どち らの再 認におい て もODl
石1
転条桝の再認率が高かっ た,
この 回転条件は180
° 回 転し た場 合で も物体の表 裏が入れ替わる ことはな く,
視 覚 認 識で の表 側と触 覚 認.
識で の裏 側 が一
致 しなかっ た,
これ らの結 果は,
異 種 感 覚で再 認 する際に 再 認 率が高い 視 点は学 習し た面に対して物 体の裏 側であ ること を示し て いる,
こ の こ と から,
Newell et al.
〔2001 )は視 覚 と触 覚の間で はある感 覚で学 習した物 体を 異 な る感 覚で再認 す る際に は視 点 依 存 的な行 動パ ター
ンが見ら れ る と主張 し た.
つ ま り,
異 種 感 覚に 用い られ る物 体の表 現は視 点 依存 的であ る と結論づ け たの で あ る.
し か しな が ら,Newell
et al.
(2001 )の実 験で は0
°
と 180° 回転以外の 視点か らの 再認率は検討さ れ な かっ た.
180°
回 転し た二 っ の視 点は類 似 性が高く,
比較 的 簡 単に 視 点の変 換が計 算できる特 異な関 係であるこ とがこれ ま で に示さ れて い る (笹岡・
乾,2000
;Vetter,
Poggio,
& Bu]thoff,
1994),
180°
回 転し た視 点が特 異で あ る た め に,
異 種 感 覚におい て再 認が容 易な もので あっ た可 能 性 は否定で き ない.
よ り厳 密に 仮説を検証 す る ため に は,
物 体を さ ま ざ ま な視 点か ら再 認し,
その再 認 率の変 化を 検 討する必要が あ る.
そこ で本研 究で は複 数の 視 点か らあ る感 覚 を 用いて物 体を学 習し,
冉認 を異な る感覚で行 う際に,
視 点によ る 物 体の冉認 率の変 化を検 討した,
垂 直 軸を中 心に 72°
間 隔で 同転し た 五っ の視点か ら 三次元物体を学 習し,
学習 時と同 じ視 点,
ある い は水 平 軸を中心に回 転 し た学 習 時 と は異な る視 点か ら同一
もしくは異 種の感 覚で再 認 を 行 う際の 冉認 率は,
三次 元 物 体の表 現 方 法の違い によっ て 異な る結 果が予 想さ れ る.
=一
次 元 物 体が視 点 依 存 的な方 法で表 現さ れて い る場 合. 垂 直 軸を中心 に回 転した学 習 と同 じ視 点か らの再 認 率は高い が,
水 平 軸を中 心に回転 し た新 奇の視 点か らの 冉認率は低 下す る と予想 さ れ る.
また,
二次 元 物 体が視 点 独 立 的な方 法で表 現さ れ て い る 場合,
学 習 時と は異な る視 点か ら再認 し て も再認率は低 下し ない と予想さ れ る.
実験1
で は,
学 習の前にあ ら か じ め再認に用い る感覚を教 示し,
方 略を用い た学 習が可 能な状 態で,
学 習 時と再 認 時の視 点の違い に よ り物体の 再認率が どのよ うに変 化す るの か を検 討し た.
実 験 2で は,
学 習の前に再 認に用い る感 覚を教 示せず,
協 力 者に 両 方の 感 覚に対 応で きるよ う な学 習 を 行 わせ,
三 次 元 物 体の再 認 率 の変 化 を 検 討 した.
実 験1
方 法 実 験 協 力 者 48 名の大 学牛 が実 験 同 意 書に署 名 し,
実 験に参 加した.
協 力 者は裸眼 も し く は矯rl親 力が [E
常 で あ り, 触覚 に お け る 運動や 感覚に問題 は な かっ
た.
ま た全 員が右 利きで あっ た,
協 力 者は実 験に関 する仮 説な ど は知ら さ れ な かっ た.
実 験 参 加 後に は報酬を与え ら れ た.
実 験デザ イン 実 験の要 因は学 習 感 覚 (2条 件:視 覚,
触 覚 ),
再 認 感 覚 (2
条 件:学 習 と 同一
感 覚,
異種感 覚),
再 認 時の 視 点 (2
条 件:学 習 時と同じ視 点,
異 な る視 点 ) の 3要 因で あっ た.
要 因の うち,
学 習 感 覚,
再 認 感 覚はE
田・
齋 木:視 覚と触覚 を用い た物 体 認 識にお ける視 点 独 立 性13
被 験 者 間 要 因で あ り,
再 認 時の視 点は被 験 者 内要因で あっ
た.
48
名の協 力 者は ラ ンダム に 4条 件 (視 覚 学 習一
同一
感 覚 再 認,
視 覚 学 習一
異種感 覚再認, 触覚学習一
同.
感 覚 再認,
触 覚 学 習一
異 種 感 覚 再 認 )に,
各 12 名ずっ 割 り当て ら れ た.
従 属変 数は再 認 成 績と して,
再認 の ヒ ッ ト率とフ ォ ル ス ァ ラー
ム率 か ら計 算 したA
’
の値 を 用い た (Aaronson & Watts,1987
).
学習と8
試 行の 再 認課 題を1
ブロ ッ ク と し,
初めに練 習 試 行を 1 ブロ ッ ク 行い,
そ の後に本試行と して8
ブロ ッ ク,
計64
試 行 を 行っ た.
刺 激お よび 実 験 装置 Newell et a1.
(2001 )と同 様に,
青 色で同一
形 状の LEGO を6
個 用い て新 奇 な 物 体 を 作 製 し た.
新 奇 物 体は物 体の 中 心が明 確に なる よ うに各 LEGO が同一
軸E
で連結 さ れて お り,
LEGO の 方 向を 縦・
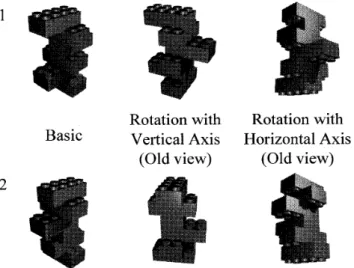
横 交互 に 位 置を変 化させ なが ら組み 合わせ た (Figure l).
本 実 験で は,
作 成 可 能な162
種 類の 中か ら ラ ン ダム に 48種 類を選ん で新 奇 物 体と し,
すべ て の 協 力 者に共通 して用いた,
個々 の物 体は目標 刺 激,
妨 害 刺 激の両 方に用い ら れ,
1度 使わ れ た刺 激が同 じ実 験で 2 度用い られること は な かっ
た.
実 験で は1
ブ ロ ッ クにっ き3種類の 刺激が ラン ダム に選 ば れ,
1種 類は 目標 刺 激 と して,
残りの 2種 類は 妨害刺激と して 用い ら れた.
ど の物 体が目標 刺 激 妨 害 刺 激と な る か はコ ン ピュー
タ に よっ て ラ ンダム に決 定され,
協 力 者によっ て異なっ て い1
2
Basic
Rotation
with
Rotation
With
Vertical
Axis
Horizontal
Axis
(
Old
view )(
Old
view )Figure 1
.
Examples of the stimuli3images
in
thc same row are ofthc
sanle objects.
Theleft
figures
are from the basic viewpoint (0°
rotati 〔)n).
The midd 】e 且gures are rotatedfrom
the
basic
viewpoint withvertical axis
.
They were presented 正n learningand test sessions
.
The right figures are rotat−
ed from the basic viewpoint with
horizontal
axis,
They were presentedin
test.
た
.
物体の弁 別は形 状 情 報だ け を基に行うこ と が可 能である (Lederman & Klatzky
,1987
),
作 製 された新 奇 物 体は色,
肌 理,
重さな ど がすべ て 同一
で,
協 力 者は全 体形 状のみを手が かりに学 習
,
可 認 を 行っ た.
視覚 刺 激 は
Blender
(http://www.
blender3d.
org / cms /Holne.
2.
0.
html
〕を用い て, 各 物 体を実 物と同じ色 形に な る よ うに三次 元グラフ ィ ッ ク で呈示し た
.
刺激 は モ ニ タ (
iiyama
製S103M
) 上 に MATLAB(MathWorks 社 製 )
,
Psychophysics
TQolbox
Version
2
(Brainard,
1997;Pelli,
1997)を 用 い て,
視 距 離57 cm,
視 角に して縦約12D
, 横約6〜14
° で呈 示さ れた.
触 覚 刺 激は実 物の LEGO を 用 い て,
身 体か ら30 cm 離 れ た場所に動か ないよ う に板に固定し て呈 示された.
な お,
協 力 者の頭 部は顎台の上で 固定さ れ た.
手 続 き 実 験の 初めに協 力 者は,
視 覚 と触 覚の う ち ど ち らの感 覚 を用い て物 体を学 習し,
ど ち らの感 覚を用い て再認 を 行 うの か を教示 さ れた.
触 覚を 用い る場 合に は アイマ ス クによっ
て 視覚 を用い る こ と は で きず,
利き手 で ある右 手のみ を使う よ うに教示さ れ た.
物体 を 動 か す こ とや体の方 向を変える ことは禁止 さ れ た が,
その他の 探 索方法につ い ては制 限さ れ な か っ た.
学 習 時に は 1種 類の 目標刺 激の み が協 力 者に呈 示さ れた。
目標 刺 激は垂 直 軸を中心 に 72°
間 隔で回転した 5 方 向の視 点か らr
順次 呈 示 された(Figure2
).
視 覚 学 習 時 に は刺激 と ブラ ン ク 画 面 が1
秒ずっ 交 互に旱 示さ れ,
触 覚学習 時に は刺 激が6
秒 呈 示され,
10秒 間の遅延の後 に次の刺激 が 旱示さ れ た.
再 認 時に は,
冂 標 刺 激お よ び妨 害 刺 激の い ずれ か が一
方 向か ら呈示さ れ た.
再 認 時の視 点は学 習 時に呈 示 し た 5方 向か らラ ン ダムで選ば れ た視 点,
も し く は学習時の 最 初に 呈 示 し た視 点を,
水 平 軸を中心 に45°
ま た は135
° 回ag
した視 点で あ っ た.
刺 激は学 習 時と同じ く,
視 覚 再認時に は1
秒 間, 触覚再認 時に は6
秒 間 呈 示さ れ た.
呈示時間は,
同一
感 覚 再 認で学 習 し た視 点 か らの再 認 率が 85%になるよ うに予 備 実験に よっ て調整さ れ た.
協 力 者は物 体が呈 示された視 点にか か わ らず 学 習 時と同譽
蟠
塗
耀
瞬
唱
囀
鬢
Figure
2,
Presentation
order ofthe
stimulusin
learning session
The stimuli were presented at
72−degrce
intervals
,
which were rotated with vertical14 基 礎 心 理 学 研 究 第
26
巻 第1
号一
物体で あっ た ど う か をで き る だ け早く,
止 確 に判 断す るよ うに教 示さ れ た.
再 認は学 習 後 す ぐに 8試 行が行わ れ,
各 試 行で正 誤に関 するフ ィー
ドバ ッ ク は与え ら れ な かっ た.
8試 行の半 数 は 乖 直 軸 を 中 心 に回 転し た学 習 時 と同じ視 点,
残 りは水 平 軸 を 中 心に回 転 した学 習 時 と 眼 な る視 点か らの 再 認で あ り,
それ ぞ れの 視 点で 「i
標 刺 激 と妨 害 刺 激は半 数 ずっ 呈 示さ れ た,
また,
各ブロ ッ クの 冒 頭に ラ ン ダム な 7桁の数 字を協 力 者が記憶す るまで呈 示 し,
協 力 者は学 習・
再 認 時 と も に常に その数字を復 唱して お く よ う に教 示さ れ た (構 音 抑 制 ).
協 力 者は数 字の復 唱と物 体の再 認の 両 方をで き るだ け 正確に行う よ う に教 示され,
各ブロ ッ ク の最 後で 復唱 し た数字を報 告さ せ た,
構 音抑 制の目 的は言語に よ る介 入を防ぐ た めであ り,
復 唱する数 字を誤っ て も復 唱 が続い て いれば試 行 を 中断 しなか っ た が,
復 唱が途 切れ た場 含に は無 効と して試行を中断し,
異なる刺激を川い て再 度 試 行を行っ
た.
数 字の報 告に関して正 誤の フィー
ドバ ッ ク は行 わ れな か っ た.
協 力 者は ブロ ッ ク間で 自 由 に休 憩 をとることがで き た.
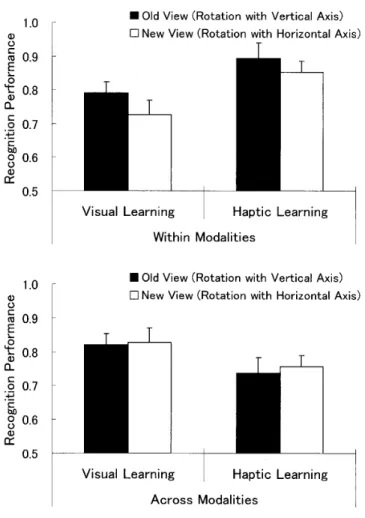
結 果 Figurc 3 は条 件ご との再 認 成 績 (A’
)を示し た もの で ある.
再認成 績に逆 正 弦 変 換 (角変換) を施 し (森。
吉 田,1990
),
学 習感 覚 (視 覚,
触 覚) と再 認 感 覚 (学 習と 同一
感 覚,
異 種 感 覚 ),
再 認 時の視 点 (学 習 時と同じ視 点 (乖 直 軸 中心の回 転 ),
異な る視 点 (水 平軸 中心の回転)) を 要 因 として,
繰 り返 しの あ る 3要 因の 分散分析 (ANOVA
)を行一
丿
た.
その 結 果,
冉 認 感 覚と再 認 時の視 点の交互作 用 (F(1,
44)t・
・
4.
08,
p
く.
05)および,
学 習 感 覚 と再 認 感 覚の 交 互作 用 が有 意で あっ た (F
(1,
44) =一
9.
97,
p
く,
005
).
.
.
ド位 検 定を行っ た結 果,
同一
感 覚 再 認におい て は,
学 習した視 点か ら の 訂認が学 習し な か っ た視 点か ら の再 認に比べ て有 意に再認率が高か っ た が (F(1.
44)=
4.
13,
〆.
05
〕,
異種感覚再 認で は再 認 時の視 点に関 して 有意 な 差異は 見 ら れ な かっ
た(F(1,
44)く1,
n.
s.
),
ま た,
触 覚 学 習 時におけ る1
司・
感 覚 冉 認では,
異 種 感 覚で の再 認 よ り も有意に再認率が高かっ た (F(1,
44)=
8.
71,
p
く.
Ol).
し か し な が ら,
視 覚 学 習 時には再認感 覚に よ る有 意な成 績の差 異は見 られなかっ た(F
(1,
44)二2.
30,
n.
s.
).
考察 同一
感覚 再 認におい て,
学 習 し た視 点からの再 認 率 が (」.
意に高か っ た こ と か ら,
物 体の認識が視 点依存的で あ る と考え るこ とがで き る,
同一
感覚において物 体の 認 識 が視 点依 存的に な る とい う結 果は多 くの先 行 研 究が指 摘 して お り(BU]thoff & Edelman,
1992;Newcl
!et al.
,
2001 )
,
本 実 験の結果 もこれ ら に一
一
.
・
致 す る結 果であ る.
9 8 7 6 5 00
0
0
0 Φ o 焉 E 」 ot Φ 」 匚 o ヨ 島 ooo 匡 田 0
り
8 7 6 5 0 0 0 0 0 Φ o ⊆ 町 E 」 o」
」 。 ユ 匚 o ヨ 勗 ooo 匡■Old View (Rotation with VertiGal Axis)
口New View (Retation with Horizontal Axis)
1
Visual Learn[ng Haptic Learning
Within Modalities
■Old View(Rotation with Vertical Axis)
on with Horizontal Axis>
Haptic
Learning
ities
一
Figure 3
.
The results of Experimentl
This graph shows the recognition perfor
−
mance when participants learned a nove13
−
D object with thcknowledge
of test modality.
The
axis of ordinate is the recognitjonperfornlance
,
which was ca !culated by hitrate and false alarm (Aaronson &
Watts,
1987
).The
b
上ackbar
shows thc recognitionpcrformance of old views
,
which wererepresented in lcarnlng session
,
The whitebar
shows the recognition perforrnance ofnew views
,
which were r()tatcd horizontallyfrom learning views
,
(upper )The
stimuliwere
tested
by
the modality as sarne as used
ln
learning
session (visual study−
within modal (visual 〕 test haptic g.
tudy−
withinmoda 【(haptic)test)
.
(lower)The stimuli were
tested
by
different modalityfrQm
usedin
learning session (visual study
−
across modal〔
haptic
) test,
haptic study−
across modal〔visual )test)
,
一
方,
異 種 感 覚再認において は Newell et al,
(2001 〕の 結 果とは異 な り,
再 認 時の視 点に よっ て再 認 率に有意な 差は見られな か っ た こ とか ら,
異 種 感 覚 間にお ける物 体 の 認識は視点に独立的であ る と考えられる,
学 習 した視 点に周 有の情 報は異種 感 覚で は用いるこ とがで きず,
物上 田
・
齋 木:視 覚と触 覚を用い た物 体認識にお け る視 点 独 立 性 15 体認識にお ける視 点の依 存 性は異 種感覚へ と拡 張さ れ な い こと が示 唆さ れ た.
触 覚 学 習に お い て,
異 種 感 覚での再 認率が同一一
感 覚で の再認率に比べ て低 かっ た.
また,
視 覚 学 習で は同一
感 覚,
異 種 感覚にか か わ ら ず再 認 率に有 意な差が見 られな か っ た.
こ の こと か ら,
視覚 学 習と触 覚 学 習で異 種 感 覚 にお け る再 認 率に非 対 称 性が あ る可能性が考え られ る.
し か し,
予備実 験に よ っ て同一
感 覚 再 認で学 習と同じ視 点か らの再 認 率が同じにな る よ うに 視 覚と触 覚の学 習と 再 認の時 間を設 定し た もの の,
実験1
で の同一
感 覚 再 認 にお け る学 習と同じ視点か ら の再 認 率を視 覚 学 習と触覚 学 習で ア ド ホ ッ クに比較す る と,
視 覚 学 習で は触 覚 学 習 に比べ て再 認 率が有意に低かっ た(t(22
)= 2,
78,
p
<.
05).
これ は,
実 際に は視 覚で の学 習 もしくは再 認が触覚で の 学 習も し く は再認 と比べ て 困 難であ っ たこ と を示 唆して い る.
そ のた め,
触 覚 学 習において異種 感 覚で の再 認 率 が同一
感 覚での再認 率に比べ て低い とい う結 果は,
視 覚 再認が触覚再認に比べ て困 難で あっ たと い う実 験 状 況を 単に反 映 して い る可 能 性が考え られ,
こ の 結果を もっ て 視覚学習と触覚 学 習で異 種 感 覚にお ける再 認 率に非 対 称 性が存 在 する と は断 定で き ない.
実 験 1で は学 習 前に予め再認 に用い る感 覚 を 教 示 し て いた ため,
事 前の知 識が異 種 感 覚 間にお け る再認の 視 点 独立性に影 響 し てい た可 能 性がある.
こ の よ う な事 前 知 識が視 点に独 立し た認識を可 能と してい たの か を 調べ るた め に,
実.
験2 を行っ
た.
実
験2
口常で は,
学 習 時に は後に再 認に用い る 感 覚 が視 覚な のか触覚なのか わ か らない こ と が多 く,
再 認 感 覚を あ ら か じめ想 定 して学 習 する状況 は少ない,
実 験 2 で は再 認 に用い る感 覚 を教 示せずに,
視 覚と触 覚の ど ち らの感 覚 に も対応で き る よ うに 三次元物 体を学 習 する よ う に教 示 し,
異 種 感 覚での視 点 独 立 的な認 識が保 持さ れ るの かを 検 討し た.
ま た,
実 験 1で は,
視 覚に よ る再 認が触覚 に 比べ 困 難で あっ
た ため,
学習と再認の時 間を再 調整 し,
視覚 学 習 と触 覚 学 習で の異 種 感 覚にお け る再認〉釈こ非 対 称 性が存 在す るの か ど うか も同 時に検 討した.
方 法 実 験 協 力 者 11 名の大学生・
大 学 院 生が実 験 「司意 書 に署 名をし,
実 験に参 加 した.
実 験 協 力者は裸眼も し く は矯正視 力がIE
常であ り,
触 覚における運 動や感 覚に問 題は なかっ
た.
ま た 全 員 が 右 利 きで あっ た.
協 力 者の 中 に実 験 1に参 加 し た者は お ら ず,
実 験に関 す る仮 説な ど は事 前に知ら さ れ な かっ た.
実 験 参加後に は報 酬を与え られ た,
実 験デザ イ ン 実 験の 要 因は実 験 1 と同 様に,
学 習 感 覚 (2条 件 ),
再 認 感 覚 (2条 件 ),
1ii認 時の 視点 (2
条 件) の3
要 因で あ り, すべ て の要 因は被 験 者 内 要 閃で あっ た,
ll 名の協力者は学習・
再認の4
条件 (視 覚 学 習一
同一
感 覚 再 認,
視 覚 学 習一
異種感 覚再認,
触 覚 学 習一
1
司一
感 覚 再 認,
触 覚 学 習一
異 種 感 覚 再 認 )の すべ て に参加し た.
学習と8
試 行の再 認 課 題を 1ブロ ッ ク と し,
本 試 行 と して 16 ブ ロ ッ ク,
計 128試 行 を 行 っ た.
刺 激お よ び実 験 装 置 実 験1
と同 様の もの を用いた.
手 続 き 協 力 者は視 覚また は触 覚を用い て物体の学習 を行っ
た.
学 習時に は協力者は,
視 覚,
触 覚の ど ち らで 再 認を行う かにっ い ては事前に教示 さ れず,
視 覚 と触 覚 の どちら で も再 認する こ と が可 能な よ うに三 次兀物 体を 学 習す る よ うに教 示さ れた.
学 習 後に再 認に用い る感 覚 が教示さ れ,
その後すぐに8
試行の 再認 が 行 わ れた.一
っ の学 習感 覚にっ き,
最 初に練 習 試 行を2 ブロ ッ ク行っ
た後,
本 試行と して 8 ブロ ッ ク (視 覚 再 認 4 ブロ ッ ク,
触覚 再 認4 ブロ ッ ク)が ラ ンダムな順 序で行 わ れ た.
休 憩を挟ん だ後に学 習 感 覚 を 変 更 し,
同 様に練 習 試 行 2 ブ 卩 ッ ク,
本試行 8 ブロ ッ ク を 行っ た.
本 試 行は全 部で 16 ブロ ッ ク,
計 128 試 行であ り,
視 覚 学 習 条件と触覚 学 習 条 件の どちらを先に行う かにつ い ては協 力 者 間で カ ウン ター
バ ラ ン スが取ら れた.
同.
.
憾 覚にお け る学習し た視点での再認 率 を視 覚 学 習 と触 覚学 習で 等し くする ために,
視覚学 習 時の刺 激の呈 示時間を1
秒か ら1.
5
秒へ と変 更し た.
した がっ
て,
視 覚 学 習で は刺 激とブ ラ ンク画 面が交 互に 1.
5
秒 ずつ呈 示 された.
触 覚 学 習で は実 験 1と同様に,
刺激 が6
秒 呈 示 さ れ,10
秒問の遅 延の 後に次の刺 激が呈 示さ れ た.
ま た,
視 覚 再認の 時 間も1.
5秒へ と変更 し,
触 覚 再 認の時 閙は6
秒だっ
た.
その 他の 手続 きは実 験 1 と同 様に して行 われ た。
結果Figure
4 は条 件ご との再 認 成 績(A ’ )を示 し た もの で あ る.
実 験 1 と 同 様に,
再認成 績に逆 正 弦 変 換 (角 変 換 ) を施 し,
学 習 感 覚 (視 覚,
触 覚 )と傷認感 覚 (学 習と同一
感覚,
異種 感 覚 ),
再 認 時の視 点 (学 習時と同じ視 点 (輩直 軸 中心の回 転), 異な る視 点 (水 平 軸 中心の回 転 )) を要 因 と して,
繰 り返 しの あ る3
要 因の 分 散 分 析 (ANOVA )を行っ た.
その結 果,
再認 感 覚 の主効果 が有 意で あ り,
同一
感 覚での再 認 が 異 種 感 覚で の再 認に比べ 再 認 率が高かっ
た (F(L10
)=8.
87,
p
く.
05).
また,
学 習 感 覚と再 認 感 覚の交互作 用が有 意傾 向であ り(F(1,
44)=
4.
04,
p
く.
1
),
下f
、 1 鹸 定 を 行っ た結 果,
触 覚 学 習に お い て16
基 礎 心 理 学 研 究 第26 巻 第1
号 ω σ9 σB o石8
話 ≡ ot8 ⊆ 。 冱 勗 。8
匡凹Old View (Rotation with Vertical Axis)
ー
ー
Il
0 0り
00 7ハ
0 5 1 α α α α 08
磊 鬘 。 t85 旧 ⊆ 切 08 庄iew(Rotation with Horizontal Axis)
Visual Learning Haptic Learning
Within Modallties
■Old View(Rotation with Vertical Axis)
口New View(Rotatien with Horizontal Axis)
Figure
4,
The
results ofExperiment
2
This
graph shows the recognition perfor・
mance whcn participants!earned a novc13
−
D object without the knowledgc of test modal−
ity
.
同一
感 覚で の再 認が異種 感 覚で の再認に比べ 有 意に再 認 率が高か一
・た 〔F
〔1,
2e
>=12.
83.
p
く.
005
}.
視 覚 学 習で は,
再認 率に再認 感 覚に よ る有意な差 異は見ら れなか っ た (F(1,
20)二
1.
14,
n.
s.
).
再 認 時の視 点の主 効果お よ び, これ を 含 む 交 互 作 用は見ら れ な か っ た.
考 察 視覚と触 覚の ど ち らの 感 覚で も再 認 することが 可 能な よ うに学 習するように教 示された状 況で は,
同一
感 覚,
異 種 感 覚の いず れの再認条件において も,
再 認 時の視 点 に よっ て冉認率に肓意 な差は見 ら れず,
三次 元 物 体の 認 識は視点に独立 的で あっ た,
異 種 感 覚にお け る物 体認識 は,
再 認 する感 覚の事 前 知 識が ない状況で あっ て も視 点 とは独 立 して認識さ れる こと が示唆 された.
ま た,
再認 す る 感 覚の事 前知識が ない状況で は,
同 感 覚に お いて も二次 元 物 体の再認 は視 点に独 立的に なっ
た.
同一
感 覚 にお け る視点の 依 存 性は再認 する感 覚の事 前 知 識に よ る 影 響を受けて いたもの である と考え られ,
学 習 し た視 点 に固 有の情 報を用い て物 体を認 識で きる の は,
同一
感 覚 で,
さ ら に学 習 時に再 認 感 覚を知っ て い る場 合のみであ ること が示唆さ れ る.
こ の結果は,
どの ような感 覚を用 い て再認 する のか分か ら な い こ と が 多い日常で は物体を 視 点 独 立 的に表 現し てい る可能性 を示 して いる と考え ら れ る.
ま た触 覚 学 習で は,
異種 感 覚におけ る再認が同.
感 覚 における再 認に比べ て再 認 率が 低か っ た.
こ の結果は,
指 摘は さ れて い ない もの のWoods
& Newcll (2004)でも同 様に示 さ れて お り(Woods & Newell
,
2004 (Fig.
6)),
視 覚 情 報を触 覚 情 報に変 換す ること は 容 易であ る が 触 覚情 報を視覚情 報に変 換す ること は困 難であ るとい う 非 対 称 性が視 覚 と触 覚の 間に存 在 する こ と が示 唆され る,
総 合 考 察 本 研 究で は複 数の視 点か ら あ る感 覚を用い て物体を学 習 し,
再 認 を 異な る感 覚で行う際に,
視 点に よ る物 体の 再 認 率の変 化 を 検 討 し た,
その結 果,
学 習 時とは異なる 感 覚を用い て物 体 を 再 認 する場 合,
視 点 とは独 立して物 体を 認識す るこ と が示 さ れた.
これ らの結果は異 種 感覚 で の物体の認識は視 点 依 存 的に行わ れる と する Newell et a1.
(2001
)の主 張と は異な る.
Newell et aL (2001
)の 実 験で は再認 す る視 点が0
° と180°
の2
通 りで あっ た が,
笹 岡・
乾(2000
)が指摘す る よ うに 180°
離 れた二 っ の視 点は類 似 性が高く比 較 的 簡 単に視 点の変 換が言1.
算 で きる特 異 な もの であり,
異 種 感 覚に よ る 認識は同一
感 覚 に よる認 識よ りもさ らに促 進さ れて い た可 能 性が考え ら れ る.
ま た,
同 の 感 覚を用い て物 体 を認識す る場 合で あっ
て も,
学 習 時に同一
感 覚で再認 す るこ と を 知 ら なけれ ば r 次 元 物 体の 認 識は視 点に独 立 的に な り,
同一
感 覚で再 認 すること を知っ て いれば 三次 元 物 体の認 識は視 点に依 存 的になる ことが本 実験か ら示さ れ た.
従 来,
視 覚にお け る物体認識は視点に依 存 的な表 現と独 立 的な表 現が併 用 して 月]い ら れ て い る と示 唆さ れて きた (Hayward,
2003 〕が,
そ の表 現方法は協力者が物体の 学 習 峙に再 認 する感 覚が視 覚で あると 認識して い るかに よ っ て も変 化 す ること が分かっ
た,
本 実 験の結 果か ら は,
同一
感 覚で 認 識 するこ と が既 知で ある場 合に は視点に依存 的な表現 を採用し,
複 数の 感 覚に対 応で き る よ う な よ り一
般 的な 物休の表現は視 点に独 立 的なもの を 採 用 してい るこ と が 示 峻される.
実 験2
の結 果か ら,
視 覚 情 報を触 覚 情 報に変 換す るこ と は容 易で あ る が触 覚 情 報を視 覚 情 報に変 換 するこ と は上 田
・
齋 木:視覚 と触覚 を用いた物 体認 識にお け る 視 点 独 立 性17
困 難である とい う非 対 称 性が ある こと が分かっ
た.
こ の 結果は,
視 覚を 用い た学 習で は両 方の感 覚で 利用で きる よ う な形式で情報を 表 現 すること が可能で あ る が,
触覚 を用い た学 習で は視 覚で利 用で きるよ う な形 式で情 報を 表 現 することが 難 しい とい う可 能 性 を示 唆 するもの と考 え ら れ るだろ う.
本 実 験の結 果からは,
異なる感 覚で の三次 元 物 体の認 識は視 点に独 立 的で あ り,
視 覚と触 覚の両 方の感 覚に対 応 し た学 習を行っ
た場 合に も 三次 元 物 体の認識は視 点に 独 立 的にな るこ とが 示された,
こ の よ うな視 点に独 立 的 な 認 識 を 可 能 と して い る 情 報 表 現に はい くっ かの可 能 性 が考えられる.一
っ は一
般 化 円 錐 によ る 三次 元モ デル(Marr & Nishihara
,
1978)や ジオ ン (geon )に よ っ て構造 記 述 的な表 現 〔Biederman
,
1987)を 用い て い る可 能 性 で あ る.Marr
&Nishihara
(1978
)やBiederman
〔1987)の指 摘す る よ う な表現 を 用いて 異な る感 覚で 物 体 認 識を行っ て い る場 合,
物 体の認 識は視 点に独、Z
的に な ると考え られる.
これに対 し,
三次 元 的 な 表 現 も 用い て いな くて も,
刺激の 親近 性 が どの 側 面 か ら も 同 じ ぐ ら い高い場 合に も認 識は視 点に独 立 的に な る と考え ら れて い る 〔Tarr
&BUIthoff,
1995).
だ が,
本 実 験で用 い た刺 激は協 力 者に とっ
て は新 奇 刺 激であ り,
新奇刺激で は学 習し た視 点の外 観の方が新た に 呈示し た外 観よりも親 近 性が高く(Edelman
&BUIthoff,
1992 ),
どの側面か らも 同じ く らい に親 近 性が高か っ た と は言え ない.
ま た, 刺 激の縦 横の方 向や位 置の変 化を,
言 語を 用 い て シ ンボ リッ ク に符号化す ることで視点に独立的な認識を行うこ と も可 能で はあるが,
本 実 験では購音 抑制が か け ら れて い た た め,
言 語を 用い た符 号 化は困 難で あっ た と考え ら れ る.
他に 三次元的な表 現 を川い て いな くて も認 識が視 点 独 立 的にな る可能 性 と して は,
刺 激に物 体を 区 別 しや すいよ うな特 徴が含ま れ る場 合が考え ら れ る.
学 習 時に 同一
感 覚で再認 する こ と が分かっ
て い る場 合に は認 識が 視 点に依 存 的に なり,
学 習 時に視 覚と触 覚の ど ちらで も 再認できる よ う に学習した場 合や異な る感 覚で再認 する 場 合に は認識が視 点に独立的になっ た とい う本 実 験の結 果は,
同一
感 覚 内で再 認 する た めにT
・が か りとして い る 物 体の特 徴と異 種 感 覚 間で再 認 するために手がかり とし て い る特 徴が異なっ
て いた可 能 瞠 を 示 唆 して いる.
異 種 感 覚 間で は比 較 的 視 点に独 立し た特 徴 を 手が か り と し,
同一
感覚 内で は視 点に依 存す る特 徴を手が か り と す る と 考え る と本 実 験の結 果 を 説 明 すること が可 能である.
本 実 験の結 果 だ け か ら は 異 な る 感 覚で再 認 す る 際に用い ら れる視 点に独 立 的な表 現がMarr & Nishihara (圭978) や Biederman (1987)の提 唱する三次 元 的な表 現である の か,
比 較 的 視 点に独立 し た特 徴を手が か りと し て い る の か は ま だ 不明で あ る.
今[・1
の実 験で は刺激と して 同一
のLEGO
を 複 数 個 用 いて新 奇 物 体を作 製し た.
新 奇 物 体で は な く日常 物 体を 刺 激と して 用いた場 合で も,
特 定の景 観は親 近 性が高 く,
視 覚で の 物 体 認 識は視 点 に依 存 的に な る と報 告され て い る(Newell
&Findley,1997
).
日常 物 体が新 奇物体 と同 様に認 識される の で あ れ ば,
本 実 験の結 果か ら学 習 とは 異 な る感 覚で 再認 す る場 合は親 近 性に か か わ らず 視 点 と独 立 的に再 認さ れ る と考え ら れ る.
し か し,
視覚で の 典 型 的 景 観 (canonical view )な ど が触 覚におい て ど の よ う に 認識さ れ るのか とい うこと は ま だ分か っ て いな い.
今 後,
新 奇 刺 激や 日常 物 体の どの よ うな特 徴を用い て同.
.
・
感 覚 内 もし く は異 種 感 覚間で認 識が可 能に なっ て いるのか を詳し く調べ ることで,
異 な る感 覚で の 物体の表 現 形 式が Marr & Nishihara (1978)や Biederman
(1987)の提 唱 する三 次 元 的な表 現であ るの か
,
比 較 的 視 点に 独 立し た特 徴を手が か り と して表現 して い るの か を 明ら かにするこ と がで き る だ ろ う.
Table
l
The mean performanccs (A
’
)of lower perf〔〕rmers andhigher
performers
in
Experiments
l
&2.
Within
modalitiesAcross
rnodalitiesPerformanceCondition Visual
]carning
Hapticlearning Visuallearning
Hapticlearning
Experiment l LQwer performers
Higher performers
Expcriment 2 Lower performers
Higher performers
Old
view New view Old view New viewOld
view New view Old view New view23727823
76887798
.
83
.
76.
95.
95
.
74
.
83,
959432138176
77996788
67786688
80917484
18
基 礎 心 理 学 研 究 第.
26巻 第 1号 異なる感 覚で再 認 する場 合や再 認 感 覚が不 明の場 合に 認識が視 点 独 立 的に な る とい う結 果の解 釈の一
っ と し て,
課 題の負荷が高く な る と物 体認識の視点 依存性が弱 まる とい うこと が考え られる.
そ もそ も再 認 感 覚を変 化 させ ることや,
視 覚 と触 覚の両 方の感 覚に対 応で きるよ うに学 習 す るこ と は 課題の 負荷の上昇 を伴う もの で あ る.
し か し な が ら,
これ まで に課題の負 荷と物 体認識の 視 点 依 存 性につ い て直 接 検 討し た研 究は見 られな い.
課 題の負荷が高 くな ると一
種の床 効 果と し て,
再 認 時の視 点に関 係なく再認率に有 意な差が見 られ な く な る とい う 可能 性iも考え る こ と が できる.
こ れを検 討 する た め に,
本 実験の 再認率に よ っ て協力.
者を2
群 (再認 率高群 と再 認 率 低 群 )に分け た.
冉 認率 高群と冉 認率低 群で は異な る感 覚に お け る課 題の負 荷の.
ヒ昇 度 合いが違うこ と が推 察さ れ る か らで あ る.
分 析の結 果,
両 群で再認感 覚と再 認時の視 点に お ける成績には有意 な 違い は 見 ら れ な かっ
た (実 験 1,
F(1,
40>=
O.
30,
n.
s.
;実 験 2,F
(1,
9)=
O.
78.
n.
s.
;Table 1参照 ).
こ の こ と か ら,
本 結 果は課 題の負 荷 の みに起 因 して い る もの で は ない と考え ら れ る だ ろ う.
だ が,
視 点 独立的な 認識が 感覚の変 化のみに よ る影 響で あっ た のか,
課 題の負 荷に よ る影 響 も受けて い る のか を こ の分 析で完令に区別 す るこ と は 困難で あ る.
今後,
単.
一
慈 覚で の 物 体認識におい て課 題の負荷量 を変化さ せ る ことに よ り,
課 題の 負 荷と視 点 依 存 性の関 係にっ い て検 討 するこ とで よ り精 緻な結 論が得 られ る と思わ れ る.
また
,
近 年 の機 能 的 磁 気共鳴 画 像 (functi(mal Mag−
neticResonance
Imaging
:fMRI
)を用いた研 究で は,
外 側 後 頭 複 合 体(Latcral Occlpital Complcx :LOC )で視
覚と触 覚の両 力
.
か ら得ら れる情 報を処理 し て い る と指 摘 さ れ て お り(Amedi ,
Jacobson
,
Hend
!er,
Malach ,
&Zo −
hary,
2002 ;James,
Humphrey,
Gati,
Servos,
Menon,
&Goodale,2002
),
さらにLOC
の前 部は抽 象 的な 三次 元情報を用いた物体認識に関 係 して お り
,
後部は イメー
ジベ
ー
ス の 物 体 認 識に関 係して い る とも指 摘されて い る〔Kourtzi
,
Erb,
Grodd,
& BUIthoff.
2003 ),
同.
・
感 覚 内では 視 点に依 存 的
・
独 立 的 な 表 現 が 併 用 さ れて お り,
異 種 感覚 間で は視 点に独立的な表現が用い ら れて い る とい う 本 研 究の 結 渠か ら,
同・
感 覚 内で用 い られる情 報は LOC の前 部と後 部の両 方で処 理 さ れて お り, 異 種感覚 で用い ら れ る情 報は専らLOC の前 部を中心 に して処理 されて い る 口∫能 性 も示 唆される で あろ う.
ま と め 三次 元 物 体を学 習 する感 覚と再 認 する感 覚が同 じで あ る場A
,
再 認 する感 覚 を 学 習 時に知っ てお れば 再 認は視 点に依 存 的にな り,
知 ら な け れ ば再認 は視 点に独 立 的に 行わ れ る.
学 習 する感 覚と再 認 する感 覚が異な る場 合に は,
と’
ちらの場 合で も再 認は視 点に独 立 的に行わ れ る.
こ の こ と は,
同一
感 覚 内で は視 点に依 存 的,
独、ン1的な表 現 を併 用 して 三次.
元 物 体を表 現して い るが,
異 種 感 覚 間 で は視 点に独 立 的な表 現を用い て 三 次元物 体を表 現 し て い るこ と を示唆 して い る.
引 用 文 献Aaronson ,
D.
,
&Watts,
B,
1987 Extensions (,fGrier’
s
Computational
Formulas
for
A ’
andB ”
toBelow −
Chance Pcrformance
,
Psychotogical Butletin,
102,
439−
442.
Amedi ,
A .
,
Jacobson
,
G .
,
Hendler,
T ,
,
Malach ,
R .
,
&Zohary
,
E.
2002 Convergence of Visual ar〕d Tac−
tile Shape Processing in thc Human Latera】Occipj
−
tal
Cornplex.
CeT
召bral C〔〕rtex,
12,
1202−
1212.
Biederman,
1.
1987 Recognition−
by−
components : Atheory of human image understanding
,
Psychotogi−
cal Reviezv
,
94,
115−
147.
Biederman ,
L,
&Gerhardstein,
P.
C .1993
Recogniz−
ing depth
−
rotated oblects : Evidence fQr three−
dimensionaj viewpoint invariance
.
ノburnal 〔ガEx一
ρerimental
Ayc
肋 ‘09y :Uum αn PercePtionαnd Per−
for
?nαnce,19,1162−ll82.
BUIth〔}ff
,
H.
H.
,
& Edeirnan,
S.
1992 Psychological
Support
for a 2D vicw interpolation theory of ob−
jeCt
reCOgnitiOn.
PrOCeedingS
Of
’
theNatiOnal
ACad −
emy qブ
Sciences,
σS
且,
89,60−64.
Brainard
,
D.
H.
1997 Th6 Psychophysics Toolbox,
Sl
)atialVision,10,433 −436.
Edelman
,
S.
,
& BUIthoff,
H.
H.
19920rientation de−
pendence
in
the
recognition offamiliar
and novelviews of 3
−
D ob ゴects.
Vision 1〜esearch,
32,
2385,
Foster,
D,
H,
,
& Gilson,
S,
J,
2002 Recognizing novelthree
−
dimentional objects by summing signalsfrom parts and views
,
Proceedings of the 1〜03}al
Society
ofLondon.
Sen
’
es B,
Biological
Sciences
,
269,
1939−1947.
Gibson,
」.
」,
1979
The
ecologica ]apProach to visualperccption
.
Boston;HoughtorlMifflin
.
Hayward
,
W.
G.
2003 After the viewpoint debate;where next in object recognition ?
Trends
加Cogni−
tiveSciences
,
7,425 .
・
427.
James,
T.
W.
,
Humphrey,
G.
K,
Gati,
J.
S.
,
Serv〔〕s,
P,
,
Menon ,
R .
S.
,
&Goodale,
M ,
A .2002
Haptic
studyor three
−dimentional
object activatcs extrastriatevisual areas
,
/▽bur
〔4
)s),
chotogia,
40 ,1706−1714.
KQurtzi,
Z.
,
Erb,
M.
,
Grodd,
W.
,
& BUIthoff,
H.
H.
2003Rcprcscrユtation of the perceived
3−D
object shape
in
thehuman
lateral
occipital complex,
Cerebrat
Corlex,
13,
911−
920.
Lederman
,
S.
J.
,
& Klatzky,
R.
L,
1987Hand
move−
上田
・
齋 木 視覚と触覚を用いた物 体 認 識に おける視 点 独 立.
陸19
Cognitive
Psycholog
>:
,
19,
342−
368.
Logothetis
,
N.
K.
PaulsJ.
,
BUIthoff,
H .
H .
,
&Poggio,
T .
1994View−dependerlt
Qbject recognition by mon−
keys.
Current
Biotogy,
4,
401−
414.
Logothetis,
N.
K,
,
Pauls,
J.
,
& Poggio,
T,
1995Shape
representation in the jnfer重or tcmporal cortex of
nlonkcys
.
Cur?’
enl Biolog.
y,
5,
552.
−
563.
Marr ,
D .
.
&Nishihara,
H .
K .1978
Representation
and recognition of the spatial organization of three
−dimensional
shapes.
Ptroceedings
of the Royαl
Society
〔ゾムondon.
Serie
.
sB ,
Biologic
α1
Sciences
,
200 ,
269
−
294,
森 敏 明
・
吉田寿 夫 (編 蓍 )1990 心理学の た めの デー
タ解 析テ クニ カル ブッ ク 北 大 路 書房
Newell,
F.
N .
,
Ernst,
M .
O .
,
T
ゴan,
B.
S.
,
&BUlthoff,
H .
H .
2001Viewpoint
dependence
in
vison and hapticobject recognition
.
Psychologicat Science,
12,
37−
42.
Newell,
F.
N.
,
& Findlay,
J.
M.
1997 Effects ofdepth
rotation on object
identification
.
Percef
)tion,26,
1231
−
1257,
仁 科 繁明
・
乾 敏 郎 1999 外観表現 と イメー
ジ操 作によ る 三次元物 体認知
.
認知科学,
6,
432−
443.
Pelli
,
D .
G .
1997 The VideoToolbQx softwarefor
vis・
ual psyehophysics :Transforming numbers
into
「novies
,
SPatial
Vision,
10,
437−
442.
笹 岡貴 史
・
乾 敏 郎2000 .
三次 元ス テ ィ ッ クパ ター
ン の 脳 内表現,
認 知 科 学,
7,
121−
130.
Tarr
,
M.
J.
,
& BUlthoff, H.
H.
19951s human 〔}bject
recognition better described
by
geon structuraldescriptions or by multiple views :
CQmment
onBiederman and Gerhardstein (1993)
.
ノburn
αt
〔ゾEκ一
Perimental
PS夕0ぬ0’ogy:Hum
αnPe
γCθPtion
αnd Per−
fo
・
rmance,
21 ,1494−1505.
Vetter,
T.
,
Poggio,
T.
,
& BUIthoff,
H.
H、
1994 Theimportance of symrnetry and virtual views
in
three−
dirnensional object recogrlition.
Current
Biot−
ogy
,
4,18−23.
Woods
,
A.
T.
,
&Newell,
’
F.
N.
2004 Visual,
haptic and cross−
modal recognition of objects and scenes.
ノburnal qプ