ホイールローダによる仕事量を考慮した土砂の最適掬い取り軌道の提案
Proposal of Optimal Pass Considering Workload for Scooping Rocks by Wheel Loaders
精密工学専攻 15 号 岡田直人 Naoto Okada
1. 緒 緒言 緒 緒 言 言 言
ホイールローダによる土砂の掬い取りからダンプトラッ クへの積み込みまでの一連の作業を自律制御で行なうこと を目標とし,産業技術総合研究所,中央大学,筑波大学,東 京電機大学,茨城大学による山祇プロジェクトを実施してい る.その中で筆者らは,効率的な掬い取り制御の手法の確立 を目指している.
作業現場では何度も同様の掬い取り作業を行うことから,
全体の作業効率やコスト面を考慮すると効率的に一度の掬 い取り作業を行うことが必要となる.掬い取り動作に関して,
土砂挙動や反力の解析やモデル化についてのいくつかの研 究が存在するが(1)~(4),ホイールローダでの効率の良い掬い取 り軌道の提案には至っていない.
これに対して本研究ではこれまで,掬い取り時にバケット が土砂から受ける反力を,A.Hemami のモデル(5)を参考とし ながら定式化し,メカニカルシミュレータを用いた実験によ る実測データにより検証してきた.本報ではこれまでに定式 化された土砂反力モデルを用い,掬い取りに要する仕事量を 最小とする最適掬い取り軌道の提案を行う.まず,一度の掬 い取り動作でバケット土砂が満載となる台形軌道を仮定し,
台形軌道のパラメータの最適値を決定する.次に実際,バケ ットの姿勢も考慮しながらその軌道で実験機による掬い取 りを行い,土砂重量を検証すると共に,軌道の補正が必要と なることを示し,土砂量を目標通りかつ仕事量を最小に掬う ことのできる最適軌道を求める.
2. 実験機 実験機の 実験機 実験機 の の の概要 概要 概要 概要
本研究で用いる実験機(山祇3.5号)を Fig.1に示す.本 実験機のスケールは実機の1/10で設計されており,掬い取り 機構の全長が約400[mm],土台ボールねじを含めると全長約
1100[mm]となる.本実験機は実機と等価な機構となっており,
ホイールローダの油圧アクチュエータの代わりにモータと ボールねじにより直動アクチュエータを構成している.バケ ット・アーム機構にはアームを持ち上げるためのアームシリ ンダが2本,バケットを上下に動作させるためのチルトシリ ンダが1本の計3本の直動アクチュエータが搭載されており,
実機のホイールローダで可能な動作をすべて再現すること が出来るようになっている. そしてバケット・アーム機構 とベース部の間には力センサとして六軸力覚センサが搭載 されている.これによりバケット先端に作用する外力をリア ルタイムで測定することが可能である.
Fig.1 Mechanical Simulator
3 . .土砂反力 . . 土砂反力 土砂反力 土砂反力の の の のモデル モデル モデル モデル化 化 化 化
A.Hemami によって五つの成分に分類された土砂反力モデル
をFig.2に示す.ここで,F1は土砂重量,F2は底面抵抗,F3
は貫入抵抗,F4は摩擦抵抗,F5は受働土圧である.これらの 力は掬い取り動作の進行状況によって変化し,その作用する 反力成分は,Fig.3 のように①挿入初期段階,②挿入後期段 階,③掬い取り初期段階,④掬い取り後期段階の四つに分類 できる.
Fig.2 Five components of reaction force
① ②
③ ④
Fig.3 Reaction force components in scooping
①挿入初期段階:バケットを水平に保ち,土砂への挿入をバ ケット円弧部に到達する前の段階.鉛直方向には土砂質量の F1と受動土圧F5が作用しているが,バケット下面からのF2
と釣り合っている.水平方向にはバケットエッジ部に前方の 土砂から作用する貫入抵抗 F3と,バケットと土砂の間の摩 擦抵抗F4が作用している.
y F x F J= x + y
θ
d d´
θ θ
d d´
θ x
y
Distance of horizontal insertion
d [mm]
Distance of gradient insertion
d' [mm]
52
30 40 50 60 70 80
255 180 132 99 73
②挿入後期段階:挿入初期段階と同様の挿入であるが,土砂 がバケット円弧部に到達している段階.この段階ではバケッ ト内部に土砂粒子の滞留が起こり,受働土圧 F5の水平成分 も反力として影響する.
③掬い取り初期段階:バケットを持ち上げながら挿入を行っ ている段階.挿入後期段階と同様の成分が作用しているが,
進行方向や土砂の性質(内部摩擦角等)によって F3成分が 異なった値となる.
④掬い取り後期段階:土砂を掬い取るためにバケットを持ち 上げている段階.水平方向に動いていないので,基本的には 土砂重量F1が支配的となる.
次に,掬い取りの際の仕事量に大きな影響を及ぼす項の土 砂反力を示す(6)(7).まず,進行方向から作用する貫入抵抗F3
は式(1)と表される.
HS K
F
3= γ
(1) ただし,バケット先端から土砂面までの高さをH,バケット 先端の断面積をS (500[mm2]),土砂密度をγ (12.4kN/m3),土 圧係数をKとする.土圧係数Kは土砂の性質で決定され,今 回の実験で利用する直径 4mm の花崗岩では,同定実験から 式(2)で表される.135 . 95 7769 . 1 0734 . 0 0011 .
0 3+ 2− +
−
= x x x
K (2)
ただし,xはバケットの上向きの挿入角度である.
受働土圧F5にはクーロン土圧(Fig.4),ランキン土圧(Fig.5) の二種類がある.式(3)にはクーロン土圧の反力式を,式(4) にはランキン土圧の反力式を示す.これまでの研究により,
バケットでの傾斜挿入の角度が 38[deg]未満の時は式(3)を,
38[deg]以上の時は式(4)を用いればよいことが判っている.な
お,式(3),式(4)において,φは土砂の安息角(38[deg]),δは 土砂-バケット間の摩擦角,βは土砂山傾斜角(38[deg]),αは 擁壁傾斜角,Wはくさび状の土砂重量である.
Fig.4 Coulomb’s earth pressure Fig.5 Rankine’s earth pressure
W FpC
) sin(
) sin(
α δ φ ω
φ ω
+ + +
= + (3)
φ β β
φ β β β
γ 2 2
2 2 2
cos cos cos
cos cos cos cos
2 1
−
−
−
= H +
FpR (4)
44 4
4. .. .最適 最適 最適な 最適 な な な掬 掬 掬 掬い い い い取 取 取 取り り り り軌道 軌道 軌道 軌道の の の の提案 提案 提案 提案
4.14.14.1
4.1 土砂反力土砂反力土砂反力モデル土砂反力モデルモデルをモデルをを用を用用用いたいたいた掬いた掬掬い掬いいい取取取り取りりり軌道軌道軌道 軌道
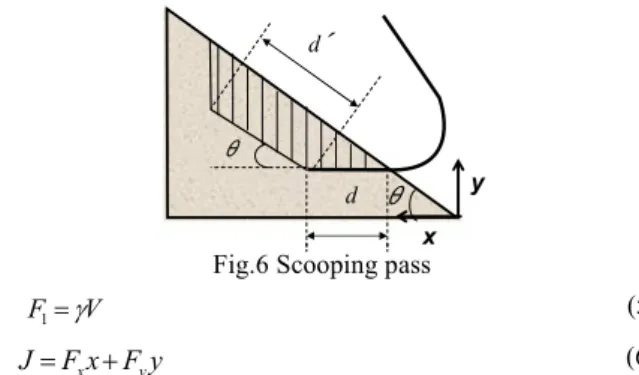
最適な掬い取り軌道を提案するにあたり,一度の動作で掬 い取ることができる土砂量と一連の掬い取り動作時に要す る仕事の総量を考慮する必要がある.一度に掬い取れる土砂 量はバケット先端の軌道で囲まれたFig.6の縦線部分の土砂 であり,その重量は式(5)で求まる.また,掬い取りに要する 仕事量を表す評価関数を式(6)とする.
Fig.6 Scooping pass V
F1=γ
(5) y
F x F
J= x + y (6)
式(5)のVはバケット先端の軌道で囲まれた土砂の体積であ る.バケット先端の軌道で囲まれたFig.6の縦線部分を台形 と見なし,この台形の面積とバケット幅250[mm]を掛けるこ とで掬い取る土砂の体積を求まり,さらにこれに土砂密度 γ を掛けることで掬い取れる土砂の重量を求めることができ る.今回は,土砂重量がバケット満載重量である15.68[N]と なる時の水平挿入距離dと傾斜挿入距離d’の傾斜挿入角度θ をそれぞれ変化させ,バケット内の土砂重量が満載かつ式(6) の仕事量を最小とする最適掬い取り軌道を求める.
土砂反力モデルの式(1)-(5)を式(6)に代入し,仕事量を最小 とする最適な掬い取り軌道を求めた.その結果,水平挿入は できるだけ小さく(無限小),そして傾斜挿入をバケットが 満載になるまで土砂山の斜面(38[deg])に平行に移動する(無
限大)軌道が 1.29[J]の仕事量を持つ最適軌道として求まる.
しかし,これは実現不能であり,実際には実験機の可動範囲 で決定される最大のd’を利用した軌道が最適軌道となる.本 研究における実験機のアームによる最大のd’ は255[mm]で,
その時の水平挿入距離dは30[mm]となる.
4.24.24.2
4.2 バケットバケットバケット内バケット内内内のののの土砂量満載土砂量満載土砂量満載土砂量満載となるとなるとなる予測軌道となる予測軌道予測軌道予測軌道
まず,求まった掬い取り動作で掬うことのできる土砂量を 実験機を用いて検証する.今回は傾斜挿入角度θを土砂山と
同じ38[deg]で一定とし,Fig.6における斜線部分の台形の土
砂重量がバケット満載重量である15.68[N]となる時の水平挿 入距離dと傾斜挿入距離d’の関係から,バケット内が満載と なる土砂量を一度に掬い取れるような予測軌道を求める.こ こでは実験機の構造上,水平挿入距離dを30,40,50,60,
70,80 [mm]として求まるバケット内の土砂量が満載となる
掬い取りの予測軌道をTable 1に示す.
Table 1 Calculation result
4.4.4.
4.3333 バケットバケットバケット底面バケット底面底面底面角角角角ののの目標軌道の目標軌道目標軌道目標軌道
本研究では,実機への適用を考慮してアームによるバケッ ト動作に加えてチルトを動作させることにより,土砂を掬い 取る際にバケット底面に傾きφを与えながら動作させる.こ れまでにバケットを水平に挿入後,バケットを傾けながら傾 斜挿入を行う場合においてバケット底面の傾きを大きくす
Distance of horizontal insertion
d [mm]
Soil weight [N]
30
13.9 40
14.9
50 60 70 80
13.8 13.9 14.2 15.1
θ φ
0 10 20 30 40 50
0 30 60 90 120 150
Bucket angle φdeg
Distance of gradient insertion d' mm
Distance of horizontal insertion
d [mm]
Acquisition rate of rate
P[%]
70
87 94 93 84 81 77
30 40 50 60 80
100
×
= Gi P Gr るほど,土砂から受ける反力の抑制と掬い取れる土砂量の増
加という二つの効果が得られると分かっている.そのため,
バケット底面が取りうる最大の傾きを与えながら傾斜方向 に掬い取る場合,つまり常にバケットの先端と後端が土砂に 接しながら掬い取る場合(Fig.7)において,バケット底面に傾 きを与える効果が最も期待できる.バケット底面が土砂山の 斜面に平行になるまで掬い取り後はその姿勢を維持したま ま斜面に沿って掬い取っていく.以上の条件から求まるバケ ット底面角の目標軌道をFig.8に示す.
Fig.7 Tilting bucket
Fig.8 Target pass of bucket angle
4.4.4.
4.4444 掬掬掬い掬いいい取取取れる取れるれるれる土砂重量土砂重量土砂重量土砂重量ののの検証実験の検証実験検証実験検証実験
Table 1 で示した水平挿入距離と傾斜挿入距離を用いた軌
道で掬い取り実験を行う.本研究でのバケットの姿勢は傾斜
挿入時にFig.8で示したバケット底面角の目標軌道で動作さ
せ,傾斜挿入距離が目標値に達したら掬い取り後期段階へと 移行する.本実験の結果をTable 2に示し,それをグラフに 表したものをFig.9示す.
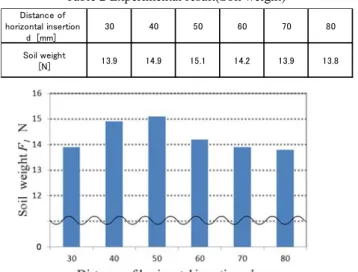
Table 2 Experimental result(Soil weight)
Fig.9 Experimental result(Soil weight)
予想では,全ての掬い取り軌道においてバケット内の土 砂重量が満載になるはずだったが,これらの結果から,いず れの軌道でも掬い取ることのできた土砂重量は予定を下回 っている.つまり,掬い取れる土砂重量を表す式(1)で求めた 土砂重量と,実際に掬い取れる土砂重量は一致していない.
バケット底面を傾けながら斜面方向に掬い取っていくこ とで,バケット内に流れ込む土砂の流動性を確保するスペー スを生むこととなる.それにより,バケット内へ流れ込む土 砂を過剰に積み込むことを減少させると考えられる.水平挿
入距離 40,50[mm]において他の軌道よりも掬い取った土砂
重量が多いのは,ここでの水平挿入距離より大きい場合と比 べて,バケット内に流れ込む土砂の流動性が上がり積み込ま れやすくなったためであると考える.そして,土砂をバケッ ト満載に掬い取れないのは,バケット内の掬い取った土砂の 流動性が小さくなり土砂の滞留を起こし,全ての土砂を掬い 取れずに一部の土砂をバケットの外に押し流してしまう.こ の現象の発生が今回のような実験結果になった原因の一つ であると推測できる.
4.4.4.
4.5555 斜面斜面における斜面斜面におけるにおけるにおける土砂土砂土砂土砂のののの獲得獲得獲得 獲得
ここではバケット内の土砂量が満載になる条件について 探っていく.
バケットを水平挿入のみを行った際には,式(5)で求めた土 砂重量と実際に掬い取れる土砂重量に差は見られない.その ため,バケットによる傾斜挿入時の動作が実際に掬い取れる 土砂重量に影響を及ぼすと考え,傾斜挿入時の掬い取れる土 砂重量に着目する.バケットの軌道はTable 1で求めた軌道 とし,バケット先端の軌道で囲まれたFig.10の斜線部分での 台形の面積から求まり掬い取れると想定される土砂重量と 実際の傾斜挿入において掬い取れる土砂重量の割合を表す 土砂獲得率Pを式(7)のように定義する.
Fig.10 Soil in gradient insertion
(7)
ここで式(7)における Grは,バケット先端の軌道で囲まれた
Fig.10の斜線部分における傾斜挿入時の実際に掬い取れる土
砂重量である.Table 2の各予測軌道におけるバケット満載量 である土砂重量から水平挿入のみで掬い取れる土砂重量を 引くことで,傾斜挿入時に掬い取れる土砂重量Giが求まる.
Table 2と式(7)の計算から求まる土砂獲得率をTable 3に示す.
Table 3 Acquisition rate of soil
Distance of horizontal insertion
d [mm]
Distance of gradient insertion
d' [mm]
293 191 142 116 90 67
30 40 50 60 70 80
Workload [J]
Soil weight [N]
Distance of horizontal insertion
d [mm]
16.04 16.07 15.78 15.68 15.68
6.74 6.67 6.79 7.11 7.51
40 50 60 70 80
この結果から,それぞれの軌道において土砂をバケット前 方や側方にどの程度逃がしてしまうのか判る.
掬い取り軌道には,バケット内満載の土砂を掬い取るため に土砂獲得率を考慮した補正が必要となる.そこで,Table 1 での各掬い取り軌道における傾斜挿入距離に対する土砂獲得
率を100[%]になるように傾斜挿入距離を変更した.傾斜挿入
距離の変更によるバケット内土砂量満載となる新たな予測軌
道を Table 4 に示す.理論的最適軌道として得られていた
30[mm]というdの値ではもはや補正は不可能となっている.
Table 4 Corrected scooping pass
4.4.4.
4.6666 土砂土砂獲得土砂土砂獲得獲得率獲得率率を率ををを考慮考慮考慮考慮したしたしたした掬掬掬掬いいい取い取取取りりり軌道り軌道軌道軌道ののの提案の提案提案提案
Table4で求めた土砂獲得率を考慮した掬い取り軌道を用い
た掬い取り実験を行う.ここでは,一連の掬い取り動作時に 掬い取れる土砂重量とそれに伴い発生する仕事量について検 証する.掬い取りに要する仕事量は,評価関数である式(6)と 実験機に取り付けた六軸力覚センサによるバケットに働く反 力の実測値から求める.
挿入角度は38[deg]で一定とし,Table 4の掬い取り軌道に 要した仕事量と掬い取れた土砂重量をTable 5に示す.それを グラフに表したものをFig.11に示す.
Table 5 Experimental result(Workload and Soil weight)
Fig.11 Experimental result(Workload)
全ての軌道において土砂重量が満載に達した.水平挿入距
離が40,50,60[mm]においてバケット満載量以上に掬い取れた
のは,バケットを傾けながら掬い取ったことによりバケット の開口部が上向きとなり土砂の堆積をより促したためである.
掬い取りに要する仕事量に関しては,水平挿入距離が50[mm]
において仕事量を最小とする軌道であることが分かる.水平
挿入距離40[mm]と50[mm]では土砂獲得率の差は見られない
が,補正した傾斜挿入距離における50[mm]程の差が仕事量に 影響を与えたと考えられる.
水平挿入距離60,70,80[mm]ではバケット円弧部分に達し
た状態で斜面方向へ掬い取るために,新たに流れ込む土砂が バケット内で滞留した土砂を過剰に押し込む.それにより,
土圧を大きくし,水平反力を大きく増加させることで仕事量 に反映されて他の軌道より仕事量が上回ったと考えられる.
以上よりTable 4の各軌道の中でも,水平挿入距離50[mm]
の軌道が一度の掬い取り動作においてバケット内の土砂量が 満載,かつ仕事量を最小とする最適な掬い取り軌道であるこ とが分かる.
今後は,今回の実測での掬い取り軌道を熟練オペレータに よる掬い取り軌道と比較や検証を行うことや傾斜挿入時にお いて土砂がバケットの外へ押し流されるメカニズムの解明を 行っていく.
55 5
5. . . .結言 結言 結言 結言
本研究ではホイールローダの最適な掬い取り軌道を実現す るにあたり,,,,理論的に求めた最適な掬い取り軌道が実験機に 適用できないことから,実際に掬い取れる土砂量と仕事量の 観点から掬い取り軌道の提案を試みた.
これまで用いてきた掬い取れる土砂重量の式で求めた土砂 重量と,実際に掬い取れる土砂重量は全てが一致するわけで はないことが分かった.バケット内の土砂量が満載量となる 条件を求めるにあたり,バケットの傾斜挿入時の土砂獲得率 を算出した.そして土砂獲得率を考慮した軌道を提案し,掬 い取り軌道に要した仕事量と土砂重量の観点から本研究で求 めた軌道における最適な掬い取り軌道の提案を行った.
参 参 参
参 考 考 考 考 文 文 文 文 献 献 献 献
(1) 高橋弘:“鉱石のすくい取り作業時におけるバケットに 作用する抵抗力の個別要素法解析”,素材物性学雑誌,
第12巻 第1/2号,pp19-26.
(2) 山元弘,茂木正晴,大槻崇,邵輝,:“油圧ショベルに よる掘削作業の自動制御技術に関する研究”,独立行政 法人土木研究所 研究成果・技術情報,2008.
(3) 高橋弘,塚本佳明,中野栄二:“破砕堆積物のすくい取 り作業時におけるバケットに作用する抵抗力に関する 基礎研究”,日本機械学会論文集(C編)63巻609号,
pp1419-1497,1997.
(4) H.Takahashi:”Analysis on the Resistive Forces Acting on the Bucket of a Load-Haul-Dump Machine and a Wheel Loader in the Scooping Task”,Advanced Robotics, Vol. 13, No.2,pp.97-114,1999.A.Hemami:“Force analysis in the scooping/loading operation of an LHD
(5) Loader”, Proc.Mine Mechanization and Automation, Almgren, Kumar & vaganas(eds), pp415-424,1993. (6) H.Osumi, T.Uehara and S.Sarata:ICAM.”Estimation of Reaction Force from Rock Piles in Scooping Operation by Wheel Loaders”,Proc. Int. Conf. on Advanced Mechanics, 2D1-1,2010.
(7) 不二原拓也,岡田直人,大隅久,皿田滋:“ホイールロ ーダの掬い取り作業時に発生する土砂反力推定”,日本 機械学会ロボティクス・メカトロニクス講演会2011講 演論文集,1A1-C02,2011