九州大学学術情報リポジトリ
Kyushu University Institutional Repository
操作性向上のためのヒトの感覚特性に関する研究
向江, 秀之
https://doi.org/10.15017/1398381
出版情報:Kyushu University, 2013, 博士(芸術工学), 課程博士 バージョン:
権利関係:Fulltext available.
操作性向上のための
ヒトの感覚特性に関する研究
A study on human sense properties to improve
operation accuracy for the human machine interface
向江 秀之
Hideyuki Mukae
2013年9月
目次
第 1 章 序論
1.1.はじめに ・・・・・・・・・・・・・・・・・・・・・・ 1 1.2.筋紡錘、腱紡錘 ・・・・・・・・・・・・・・・・・・・ 2 1.3.感覚の特性 ・・・・・・・・・・・・・・・・・・・・・ 3 1.4.確率共鳴現象 ・・・・・・・・・・・・・・・・・・・・ 4 1.5.筋紡錘へのノイズ付与の効果 ・・・・・・・・・・・・・ 6 1.6.体性感覚機能へのノイズ付与の効果 ・・・・・・・・・・ 7 1.7.本論文のテーマ ・・・・・・・・・・・・・・・・・・・ 8 1.8.本論文の構成 ・・・・・・・・・・・・・・・・・・・・ 9 1.9.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 11
第2章 片手操作における力感覚特性に関する検討
2.1.本実験の目的 ・・・・・・・・・・・・・・・・・・・・ 13 2.2.実験方法 ・・・・・・・・・・・・・・・・・・・・・・ 14 2.3.結果 ・・・・・・・・・・・・・・・・・・・・・・ 21 2.4.考察 ・・・・・・・・・・・・・・・・・・・・・・ 26 2.5.まとめ ・・・・・・・・・・・・・・・・・・・・・・ 27 2.6.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 28
第3章 片手操作における微小振動付与の効果の検討
3.1.本実験の目的 ・・・・・・・・・・・・・・・・・・・・ 29 3.2.実験方法 ・・・・・・・・・・・・・・・・・・・・・・ 30 3.3.結果 ・・・・・・・・・・・・・・・・・・・・・・ 35 3.4.考察 ・・・・・・・・・・・・・・・・・・・・・・ 40 3.5.まとめ ・・・・・・・・・・・・・・・・・・・・・・ 42 3.6.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 43
第4章 片手操作における微小振動の効果のメカニズム検討
4.1.本実験の目的 ・・・・・・・・・・・・・・・・・・・・ 44 4.2.実験方法 ・・・・・・・・・・・・・・・・・・・・・ 45 4.3.結果 ・・・・・・・・・・・・・・・・・・・・・・ 49 4.4.考察 ・・・・・・・・・・・・・・・・・・・・・・ 51 4.5.まとめ ・・・・・・・・・・・・・・・・・・・・・・ 52 4.6.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 53
第5章 両手操作における微小振動付与の効果の検討
5.1.本実験の目的 ・・・・・・・・・・・・・・・・・・・・ 54 5.2.実験方法 ・・・・・・・・・・・・・・・・・・・・・ 54 5.3.結果 ・・・・・・・・・・・・・・・・・・・・・・ 59 5.4.考察 ・・・・・・・・・・・・・・・・・・・・・・ 63 5.5.まとめ ・・・・・・・・・・・・・・・・・・・・・・ 64 5.6.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 65
第6章 両手操作における、微小振動の効果のメカニズム検討
6.1.本実験の目的 ・・・・・・・・・・・・・・・・・・・・ 66 6.2.実験方法 ・・・・・・・・・・・・・・・・・・・・・ 67 6.3.結果 ・・・・・・・・・・・・・・・・・・・・・・ 72 6.4.考察 ・・・・・・・・・・・・・・・・・・・・・・ 76 6.5.まとめ ・・・・・・・・・・・・・・・・・・・・・・ 77 6.6.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 77
第7章 総括
7.1.各章の概要 ・・・・・・・・・・・・・・・・・・・・ 78 7.2.操作性向上に寄与する感覚特性 ・・・・・・・・・・・・ 79 7.3.操作デバイスへの応用 ・・・・・・・・・・・・・・ 79 7.4.結語 ・・・・・・・・・・・・・・・・・・・・・・ 80 7.5.引用文献 ・・・・・・・・・・・・・・・・・・・・・・ 81
謝辞 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 82
第1章 序論
1.1.はじめに
若年者や高齢者、男性や女性など体格や運動能力などが異なる人々の誰もが、
車両や機械の操作を正確かつ楽に行うことができる操作性の研究は、快適・安 全な生活環境実現のための重要なテーマである。
これまで操作性に関しては数多くの研究があり、田村(1998)によれば、そ の対象はコンピュータ上のインタフェースと、機械や車両操作の人間機械系イ ンタフェースに分類される。このうち筆者らは人間機械系インタフェースに着 目している。
この人間機械系のインタフェースは、両手による操作と、片手による操作に 大きく分けられる。両手による操作デバイスの代表として、自動車のステアリ ングホイールがある。このステアリングホイールの大きさや形状は車両によっ て異なり、バスやトラックなど大型車には径の大きなものが用いられ、フォー クリフトでは、ノブつきの小径のものが用いられている。
このステアリングホイールに求められている機能は、車両の進む向きを入力 する操舵であり、操作性が良く、身体的、精神的に負担が少ないものが望まし い。しかしステアリングホイールの操作は両手による大きな動作であり、筋負 担も大きい。
そこで身体的な負担を減らすために、片手にて操作するジョイスティック(操 縦桿)など、小さな入力量(変位)のデバイスも使用されている。この入力量 が小さな操作系では、操作者は腕や手の動きよりも、力の出し方を制御しなが
ら操作する場合が多い。ここでの操作性向上のためには、ヒトが力を制御する 特性に基づき、操作しやすい形状の入力方法であることが望ましい。
しかし現状のジョイスティックは、操作性に優れているとは言えず、この原 因として、機構的やコストの制約だけでなく、設計に反映できる力の制御に関 する基礎データや感覚特性の知見が少ないことが挙げられる。これまで力を出 す感覚や力の弁別閾について基礎検討はあるが(Johansson, 1992;村瀬ら, 1994;藤本ら, 2000;山口ら, 2006)、実際の操作に近い動きにてヒトが力を制 御する特性の研究は少ない。
一方、現行のステアリングホイールに関する操作性の向上について考える。
ヒトは加齢とともに、感覚機能が低下する。しかし脳内の運動プログラムは機 能低下前のままなので、本人がイメージする操作と実際の操作に乖離やミスマ ッチが生じており、その結果として車の運転が粗くなる等の行動に現れると考 えられる。この低下した感覚機能を機能低下前の水準に近づけることができれ ば、操作性は向上(若い頃のレベルに近づく)する可能性がある。
この点に関して、近年の確率共鳴の研究(Collins and Imhoff, 1996;Collins et al., 1997;Collins, 2003;Priplata et al., 2006)から、ヒトが感じな い適度な強さの振動や電気などのノイズを皮膚に加えると、その部位の触覚受 容器の感度が増強され、閾値以下の刺激を感知する場合があることが分かって きた。さらにこの効果は、筋紡錘や腱紡錘にも見られることが報告されている
(Cordo et al., 1996;Fallon et al., 2004)。よってステアリング操作時に、
主働筋に適切なレベルのノイズ(振動)を付与することにより、操作の精度が 向上する可能性がある。
1.2.筋紡錘、腱紡錘
操作(動き)に関する感覚受容器は、図 1.1 に示す筋紡錘と腱器管であり、
四肢の位置の調節や複数の筋の協調運動のために必要な求心性の情報を出力 している。このうち、筋紡錘は数本の錘内筋線維(核鎖線維と核袋線維)から なっている。感覚部は弾力的な中央部にあり、1 次終末からの Ia 線維と 2 次終 末のⅡ線維の 2 種がある。前者を刺激すると筋紡錘の長さ(変位)の検出感度 が増大し、後者を刺激すると長さの速度変化の検出感度が増大し、それぞれの 変化に比例した出力インパルスを発生する。また、γ運動ニューロンの活動に より筋紡錘の各検出感度を調節する。
一方、腱器官は筋張力に比例した出力インパルスを発生し、インパルスは求 心性 Ib 線維を経て、筋収縮に作用するα運動ニューロンに抑制的に働く。腱 器官は、張力制御、機械インピーダンスの調節あるいは筋の断裂保護などの機 能を果たしていると考えられている(星宮ら、1993 より引用)。
1.3.感覚の特性
代表的な感覚の特性として、Weber の法則と Weber-Fechner の法則がある。
ドイツの生理学者 Weber は、2 つのおもりの重さの違いが知覚されるためには、
両者が軽い場合よりも重い場合の方が、より大きな重さの違いを必要とするこ とを発見した。つまり弁別閾の大きさは刺激の強さの線形関数になっており、
知覚できる刺激の強さの増分(△φ)は、もとの刺激の強さ(φ)に対して、
常にある一定の比(c)となっている。この関係は Weber の法則と呼ばれてい る。Weber 比を式 1.1 に、Weber 比の例を図 1.2 に示す。
Fechner はφについて積分することにより、Weber の法則から一般式を導き 出した。感覚量(Ψ)は、絶対閾からの単位で表した刺激の強さ(φ)、そし てk はある一定の乗数で、感覚の次元とモダリティによって異なる。つまり心 理的な感覚量は、刺激の強度ではなくその対数に比例して知覚される。この関 係を式 1.2 に示す。この関係は Weber-Fechner の法則と呼ばれている(星宮ら, 1993 より引用)。
図 1.1 骨格筋の神経支配(星宮ら, 1993 より引用)
1.4.確率共鳴現象
一方、感覚にはノイズの混入により知覚が増強される特徴も持つ。これまで ノイズは信号を減衰(S/N 比を低下)させると考えられてきたが、Wiesenfeld and Moss (1995)は、ザリガニなどの生物では、感覚受容器と感覚システムにお いて、ノイズによる知覚の増強が行われていることを報告している。この現象 は確率共鳴または確率共振(Stochastic Resonance:SR)と呼ばれ、これまで 神経生理を含めて様々な非線形なシステムにて理論的、実験的に確認されてい る。
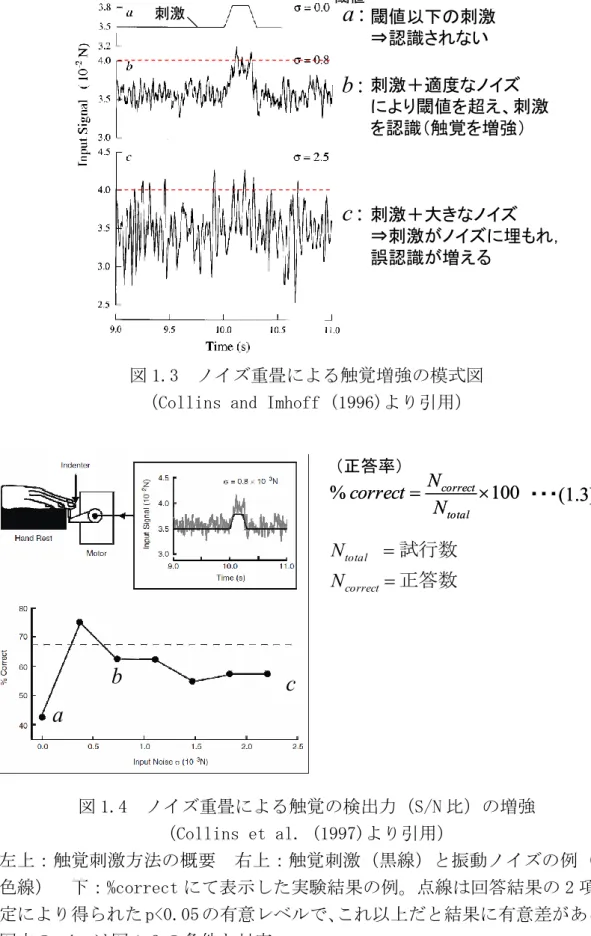
ヒトの感覚においても、ノイズによる弱い信号の増強や検出が可能であるこ とが分かってきた。Collins らのグループは、ヒトの触覚を対象にノイズ付与 の実験を行い、適度なレベルのノイズにより、閾値以下の刺激に対する触覚の 検出力(S/N 比)が向上することを示した(Collins and Imhoff, 1996;Collins et al., 1997;Collins, 2003)。この概要を図 1.3 に示す。触覚の検出力は、
刺激認知の S/N 比として正答率(式 1.3 %correct)を用いている。この触覚に おける確率共鳴現象の特徴を以下に示す。
・ 適度なノイズは、触覚の検出力を増強する(S/N 比は向上:図 1.3b 参照)
・ 大きなノイズは、触覚の検出力を阻害する(S/N 比は低下:図 1.3c 参照)
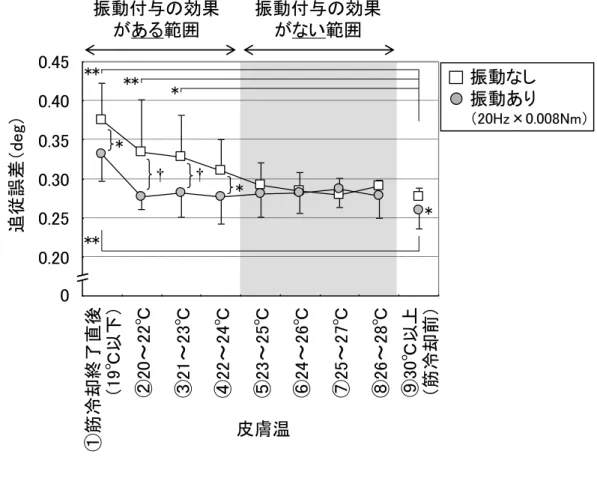
・ ノイズによる触覚の検出力は、あるレベルにて最大となり、そこから離れる と低下する。このパターンを SR 型反応(図 1.4 下参照)と呼ぶ。
図 1.2 挙錘実験における Weber 比。
2 人の観察者の△φ/φの値は、それ ぞれ最小の刺激値を除き、刺激範囲 全体にわたってほぼ一定である。
(Engen (1971)より引用)
log ・・・
(1.2) log ・・・
(1.2)
c ・・・
(1.1)
c ・・・
(1.1)図 1.4 ノイズ重畳による触覚の検出力(S/N 比)の増強
(Collins et al. (1997)より引用)
左上:触覚刺激方法の概要 右上:触覚刺激(黒線)と振動ノイズの例(灰 色線) 下:%correct にて表示した実験結果の例。点線は回答結果の 2 項検 定により得られた p<0.05 の有意レベルで、これ以上だと結果に有意差がある。
図中のabc は図 1.3 の条件と対応
正答数 試行数
correct total
N N
a
b c
閾値以下の刺激
⇒認識されない
刺激+大きなノイズ
⇒刺激がノイズに埋もれ,
誤認識が増える 刺激+適度なノイズ により閾値を超え、刺激 を認識(触覚を増強)
閾値
a :
: b
: c
刺激
100
%
total correct
N
correct N 100
・・・(1.3)%
total correct
N
correct N
・・・(1.3)(正答率)
図 1.3 ノイズ重畳による触覚増強の模式図
(Collins and Imhoff (1996)より引用)
1.5.筋紡錘へのノイズ付与の効果
Cordo et al. (1996) は、手首の腱にホワイトノイズの振動を与え、筋紡錘 へのノイズ刺激の効果を検討した。その結果、図 1.5 に示すように、掌の動き に対する筋紡錘からの求心性の発火頻度は、ノイズのレベルにより異なる SR 型 の反応を示し、確率共鳴現象が生じていることを報告している。また Fallon et al. (2004)は、腱器官においてもノイズ付与により、発火頻度が増加する結果 を示している。
図 1.5 筋紡錘におけるノイズ刺激の効果(Cordo et al. (1996)より引用)
上段:筋紡錘からの求心性発火(Ia 線維)、中段:手首の角度、
下段:腱に加えたノイズの大きさ(ランダム振動)
条件は、a:ノイズなし b:中ノイズ付与 c:大ノイズ付与
手首の角度 (deg)
筋紡錘からの求心性発火
ノイズレベル (μm)
時間(秒) 時間(秒)
時間(秒)
1.6.体性感覚機能へのノイズ付与の効果
Priplata et al.(2006) は、高齢者や糖尿病性神経障害、脳卒中患者の体性 感覚機能を高めるために、この確率共鳴現象に着目し、足裏への機械的および 電気的ノイズ刺激の効果を検討した(図 1.6 参照)。これは高齢者や上記患者は、
皮膚感覚と身体への動揺(平衡感覚)に対する反応が鈍いため転倒しやすく、
その原因の 1 つとして、体性感覚や触覚の機能が低下していると考えられるた めである。
適度なレベルのノイズ刺激の結果、高齢者の重心動揺の変動量が、若年者と 同等のレベルとなったことから、ノイズ刺激により平衡感覚が改善される可能 性を示した。さらに、機械的ノイズ、電気的ノイズともに平衡感覚を改善する 効果があり、感覚刺激とノイズ刺激は、同じ種類でなくとも確率共鳴現象が生 じる可能性を示した。
このようなノイズの活用により、高齢者、脳卒中患者などの触覚、体性感覚 の回復や、また細かい操作が要求される、手術ロボットの入力デバイスにおけ る操作精度向上などへの応用が期待できる。
図 1.6 足裏への機械ノイズ刺激による、バランス制御向上の実験方法
(Priplata et al.(2006)より引用)
左上:立位テストの実験装置の図
右上:重心動揺の変動量のプロット例(肩のマーカーの 30 秒間の軌跡)
1.7.本論文のテーマ
超高齢社会である日本や欧州など先進国では、視覚や聴覚だけでなく、動き
(操作)の機能も低下した高齢者に対して、機能低下前と同じ生活を送るため の適切な支援が必要と考えられる。そしてそれは、今までに慣れた操作方法を 変えないことが望ましい。
そのためには、ヒトの動き(操作)の特性に基づいた「使いやすい」操作方 法に配慮し、操作をより円滑に行える(=適切に支援する)ことが必要と考え られる。また必要以上の支援は、操作に関する注意を低下させ、動き(操作)
の能力の廃用を促進する可能性がある。そこで、ヒトに本来備わっている能力 を回復させる方法が望ましく、それにより必要な支援は少なく、もしくは必要 なくなるはずである。
この適切な操作支援(または操作性向上)に関して筆者が着目しているのは、
動き(操作)に関する感覚特性である。操作時に行われている制御の例として、
筋の運動制御モデルを図 1.7 に示す。操作では視覚的なフィードバックと同等 に重要なのが、筋紡錘と腱器官からの動きや力の求心性フィードバックである。
高齢者は筋力だけでなく、この筋紡錘、腱紡錘の機能も低下したことにより、
操作や動作の機能が一層低下していると考えられる。
図 1.7 筋運動制御のブロック図(星宮ら, 1993 より引用)
入力は脳から脊髄への指令Nc と手足に加わる外力 F で、
出力は手足の位置X である 脳
腱器官
収縮力 発生要素
筋紡錘
粘弾性要素
骨格・負荷系 α 運動
ニューロン
(脊髄) 筋
外力F
+ - X 指令Nc -
+
- + +
これまでの研究から、確率共鳴現象により体性感覚を増強(感度を向上)で きる可能性が示されている。この効果が操作においても生じるならば、適切な ノイズ刺激により、高齢者でも操作能力をある程度回復させることが出来ると 考えている。このような感覚特性に基づく支援技術は超高齢化社会において必 須であるが、ノイズ刺激の動き(操作)への効果に関する検討はほとんど見ら れない。
そこで筆者らは、ヒトの力や動きの感覚特性に基づく操作性向上法の提案を 最終目標としている。言い換えると、気づかないうちに操作が上手くなる支援 技術の開発であり、そのためには以下の点が重要と考えている。
操作デバイスがヒトの感覚や動きの特性を上手く反映した、操作しやす いものであること。つまり基本設計が良いこと。
ヒトにもともと備わっている能力(機能)を十分に活用すること。つま り高齢者では、加齢により低下した感覚の感度を、外部からの不快でな い刺激などを使って元のレベルに戻すこと。
上記の感覚特性を組み合わせることにより、効果を高めること。
このうち本論文では、操作に関する感覚特性の基礎検討を、以下の方向性に て行う。
1) 片手と両手による操作を対象とする。
2) 操作における、ヒトが力を出す、力を制御する感覚特性の基礎検討を行 う。だたし、両手操作のステアリングを対象とした研究は多いことから、
両手操作に関しては割愛する。
3) 操作における、ノイズ付与による確率共鳴現象の効果の確認と、そのメ カニズムについて検討する。
1.8.本論文の構成
本論文の題目は、「操作性向上のためのヒトの感覚特性に関する研究」とし、
全7章より構成される。第2章~第4章では片手操作を対象に、第5章~第6 章では両手操作を対象とした検討である。各章の内容を以下に述べる。
第1章では、操作に関する感覚特性について、既存の知見や研究を述べる。
第2章では、力の制御に関する感覚特性の検討として、片手で操作するジョ イスティックを想定した検討結果について述べる。
第3章では、振動(ノイズ)付与による操作への効果について、片手操作に
よるトラッキング作業を対象にした検討結果について述べる。
第4章では、操作精度向上への筋紡錘の寄与について検討するために、筋冷 却により筋紡錘の機能を低下させた場合の振動付与の効果についての検討結果 について述べる(片手操作を対象)。
第5章では、振動付与による操作精度向上について、両手操作を対象にした 検討結果について述べる。
第6章では、操作精度向上のメカニズム検討として、振動の伝達の影響につ いて、両手操作を対象にした検討結果について述べる。
第7章では、以上の内容全体についての総括を述べ、ヒトの感覚特性が、ど のように操作支援(操作性向上)に活用できるか考察する。
なお第2章の内容は、向江(2008a)の「ジョイスティック操作系検討のため の手の能動的な発揮力特性の基礎研究」、向江(2008b)の「ジョイスティック 操作系検討のための手の能動的な発揮力特性の基礎研究 -第 2 報 中高年者の 発揮力特性-」を基に再構成したものである。
また第3章、第4章の内容は、未公表の実験結果であるが、近日中に論文と して公表する予定である。さらに第5章、第6章の内容は、向江ら(2013)の
「ステアリングへの微小振動付与が追従作業に及ぼす影響」を基に再構成した ものである。
1.9.引用文献
1) 田村博(編). ヒューマンインタフェース. オーム社, 1998
2) Johansson RS et al. Somatosensory control of precision grip during unpredictable pulling loads, I. Changes in load force amplitude,
Experimental Brain Research,89: 181-191, 1992
3) 村瀬智彦ほか. 幼児の把握,肘関節の屈曲および伸展時の力量弁別特性と発揮力
量との対応関係. 体力科学, 43: 104-112, 1994
4) 藤本英雄ほか. 指先における一定力と弾性力に対する弁別閾測定. ヒューマンイ
ンタフェース学会論文誌,2(4): 67-72, 2000
5) 山口恭平ほか. 人の能動的指先発揮トルクの計測とモデル化. 日本ロボット学会
学術講演会講演論文集, 2006
6) Collins JJ and Imhoff TT. Noise-enhanced tactile sensation. Nature, 383: 770,
1996
7) Collins JJ, Imhoff TT, Grigg P. Noise-mediated enhancements and decrements in human tactile sensation. Physical Review, 56(1): 923-926, 1997
8) Collins JJ. Noise-enhanced human sensorimotor function using stochastic resonance to enhance somatosensation and improve performance of the human balance control system. IEEE Engineering in Medicine and Biology Magazine:
76-83, 2003
9) Priplata AA, Parritti BL, Niemi JB, Hughes R, Gravelle DC, Lipsitz LA, Veves A, Stein J, Bonato P, Collins JJ. Noise-enhanced balance control in patients with diabetes and patients with stroke. Ann Neurol, 59(1): 4-12, 2006 10) Cordo P, Inglis JT, Verschueren S, Collins JJ, Merfeld DM, Rosenblum S,
Buckley S, Moss F. Noise in human muscle spindles. Nature, 383: 769-770, 1996 11) Fallon JB, Carr RW, Morgan DL. Stochastic resonance in muscle receptors.
Journal Neurophysiology, 91(6): 2429-36, 2004
12) 星宮望, 赤澤堅造. 筋制御系 第 3 章 脊髄反射と運動サーボの仕組み. 昭晃堂, 1993
13) Engen T. Psychophysics. Discrimination and detection. Kling JW and Riggs LA (Eds.), Woodworth & Schlosberg’s experimental psychology (3rd ed.). New York, 1971
14) Wiesenfeld K and Moss F. Stochastic resonance and the benefits of noise, Nature 373: 33, 1995
15) 向江秀之. ジョイスティック操作系検討のための手の能動的な発揮力特性の基礎
研究. 日本生理人類学会誌, 13(2): 19-28, 2008a
16) 向江秀之. ジョイスティック操作系検討のための手の能動的な発揮力特性の基礎 研究-第 2 報 中高年者の発揮力特性-. 日本生理人類学会誌, 13(4): 25-34, 2008b
17) 向江秀之, 安河内朗. ステアリングへの微小振動付与が追従作業に及ぼす影響.
日本生理人類学会誌, 18(3): 115-124, 2013
第2章
片手操作における力感覚特性に関する 検討
2.1.本実験の目的
これまで筆者らは、機械や車両操作の人間機械系インタフェースを研究対象 とし、人間中心設計の観点から、誰もが覚えやすく使いやすいインタフェース の研究に取組んできた(向江ら, 2003;Mukae, 2006;雨宮ら, 2007)。
人間機械系インタフェースは、ステアリングなどの両手による操作と、ジョ イスティックなどの片手による操作に大きく分けられる。この操作系の近年の 傾向として、産業車両にてジョイスティック型荷役操作デバイスが増加してい る。これは複数の入力操作を 1 本のジョイスティック上に集約することが出来 るため、製造コストや操作系配置のためのスペースが少なくて済み、操作に必 要なヒトの動作も少なくなるなどのメリットがある。さらに操作反力や操作の 割り当て、ヒトからの入力に対する機械への指令値を任意に設定できることか ら、荷役だけでなく近未来には車両の運転操作へも普及していくと考えられる
(既に電動車椅子の操作系に用いられている)。
その一方で、産業車両のジョイスティック操作方法や設置場所、反力設定は 各社独自の仕様となっており、あるメーカーの操作方式に慣れていても、他メ ーカーの操作方式の習得に長時間の身体的かつ精神的な努力が必要な場合があ る。さらにヒトの操作姿勢や力の特性を考慮していない操作系では、手首の疾 病や肩、首の疲労が増加することが懸念されている。
人間中心設計の観点から考えると、この問題の原因の1つとして、操作系設 計の基盤となるような操作性に寄与する人間の基礎的なデータベースが不十分 であることが挙げられる。腕や手の最大発揮力や関節可動域については日本人 のデータベース(佐藤ら, 1992、(独)製品評価技術基盤機構5))などがあるが、
これらは解剖学的な関節運動にて計測された値が中心である。
一方、操作系設計の際に必要とされる、実際の操作姿勢にてジョイスティッ クを把持する手首や指の基礎特性(関節可動域や最大発揮力など)や、実際の 入力を想定した操作特性(微小な入力操作に寄与する最小の力、力を出す感覚 量と実測値の関係など)について、性差や年齢差の影響も含めて計測した研究 例はほとんど見られない。
さらに触覚や受動的な力の大きさの感覚には感覚特性であるWeberの法則や Weber-Fechnerの法則が成立つ報告(Johansson et al., 1992;大山ら, 1994;
藤本ら, 2000;Gescheider, 2002)があるが、力を出す感覚の特性に関する報 告は限られている(村瀬ら, 1994;山口ら, 2006)。この特性を把握すること で、操作系の設計などへの応用が期待でき、より快適・安全な操作系の開発に 寄与できると考えている。
そこで本実験では、片手による比較的ゆっくりとした操作を想定し、力を出 す感覚の特性(Weber の法則、Weber-Fechner の法則)に関する基礎データの 測定を行う。
2.2.実験方法 1)実験装置
実験装置全体の外観を図 2.1 に示す。上肢のみにより出す力を計測するため、
被験者の体幹(上半身)を 4 点式シートベルトで固定している。また産業車両 などの操作姿勢を参考に、シートバック角度を約 15°とし、グリップ(力入力 装置)を把持し,アームレストに前腕を置いた状態にて、ワキの開き(肩関節 の外転角)を約 20°、肘の角度を約 120°、手首関節が中立位(橈屈-尺屈、回 内-回外、掌屈-背屈の中間位:図 2.3 参照)となるように力入力装置の位置を 調整した。
図 2.2 に力入力装置の構成と、設定した力の座標系を示す。力入力装置は被 験者からグリップ(力点)へかかる手先力を、6 軸力センサ(ATI 製 Nono25)を 用いて X、Y、Z 軸方向の並進力と各軸周りのトルク(Tx、Ty、Tz)に分離して
計測することができる。円柱のグリップ部の直径は 40mm、長さは 120mm であり、
グリップ部および力センサは金属製の剛体で変位しない構造となっている。
図 2.3 に計測した力の方向を示す。今回は使用頻度が高いと思われる尺屈、
回外、回内の 3 方向のトルクとした。
4点式 シートベルト
力入力装置
Y Z
ディスプレイ とスピーカー
図 2.1 実験装置全体の外観
図 2.2 力入力装置(左)と力の座標系(右)
力入力装置の計測誤差は Full Scale で 2%以下である。力の座標系として、
被験者の前後方向を Y 軸とした右手系で設定した。
Y Z
X
Tx Tz
Ty
φ40mm
120mm
6軸 力センサ 力点
2)被験者
被験者は無作為に抽出した若年男性 10 名(年齢 21-37 歳、平均 25.2 歳)、若 年女性 7 名(年齢 33-38 歳、平均 35.6 歳)、中高年男性 8 名(年齢 52-66 歳、
平均 60.5 歳)、中高年女性 8 名(年齢 48-66 歳、平均 57.1 歳)であり、全員右 利きである。被験者の構成を表 2.1 に示す。被験者には実験の概要と、実験中 止の権利など倫理的な配慮について十分説明し、実験参加への同意書を得てか ら実験を行なった。
図 2.3 計測したトルクの 3 方向(右手の尺屈、回外、回内)
尺屈(Tx(-)) 中立位
回内(Ty(-)) 回外(Ty(+))
中立位
3)最小トルク(Weber 比)のデータ計測
実際の操作では、ある一方向の力を維持しながら、微小な力を加える操作を 行なうことが多くある。この状態を模擬して、任意の 1 方向に一定の力(定常 トルク)をかけた状態にて、同じ方向に最小の力(トルク)を加える操作を行 った(以下、最小トルク実験)。
図 2.4 に最小トルク実験時の被験者への視覚フィードバック画面を示す。デ ィスプレイ上に計測対象である 1 方向の定常トルクの目標値(直線)と、被験 者が出したトルクの実測値(矩形波状の曲線)を表示している。被験者が出し たトルクは、画面上では力を加えると上昇し、力を抜くと下降する。
被験者は指示された方向で目標値に近いトルクを維持し、矩形波状になるよ うに、約 1 秒かけて最小のトルクを加え、約 1 秒保持し、約 1 秒かけて最小の トルクを抜いて目標値を維持する操作を、計測時間 90 秒の間に 10 回ほど行っ
被験者 年齢(歳) 身長(cm) 体重(kg)
EM1 66 170 67
EM2 64 181 87
EM3 63 172 65
EM4 62 175 70
EM5 62 160 61
EM6 57 160 57
EM7 52 164 50
EM8 58 167 61
平均 60.5 168.6 64.8
標準偏差 4.5 7.4 10.9
被験者 年齢(歳) 身長(cm) 体重(kg)
EF1 50 160 51
EF2 55 164 50
EF3 58 157 53
EF4 48 155 47
EF5 65 155 60
EF6 64 160 59
EF7 51 160 55
EF8 66 156 59
平均 57.1 158.4 54.3
標準偏差 7.2 3.2 4.8
【若年男性】
被験者 年齢(歳) 身長(cm) 体重(kg)
M1 21 181 60
M2 24 176 60
M3 32 175 68
M4 30 177 63
M5 21 172 66
M6 22 178 59
M7 20 169 60
M8 21 172 58
M9 37 178 68
M10 24 178 70
平均 25.2 175.6 63.2
標準偏差 5.8 3.6 4.4
被験者 年齢(歳) 身長(cm) 体重(kg)
F1 33 160 48
F2 35 158 55
F3 36 160 54
F4 35 157 45
F5 38 160 50
F6 35 167 56
F7 37 164 54
平均 35.6 160.9 51.7
標準偏差 1.6 3.5 4.1
A
B
C
D
【若年女性】 【中高年女性】
【中高年男性】
表 2.1 被験者の構成 A:若年男性群(N=10)、B:若年女性群(N=7)、 C:中高年男性群(N=8)、D:中高年女性群(N=8)
た。そのうち操作が上手く行えたもので、最小トルクの値が少ない方から 3 回 分を解析データとした。式 2.1 に最小トルクの計算式を、式 2.2 に Weber 比の 計算式を示す。
表 2.2 に最小トルクの計測条件を示す。若年群と中高年群の定常トルク条件 の差は、中高年群では定常トルク 0.5Nm が難しい被験者がいたため、体力差を 考慮したものである。
表 2.2 最小トルクの計測条件
図 2.4 最小トルク実験時のフィードバック画面(ディスプレイに表示)
計測方向のトルクを加えると曲線が上昇し,力を抜くと下降する
T
min1
T
max1
T
min2 T
max2
T
min3 T
max3
時間
トルク実測値(Nm)
定常トルクの目標値
力入力装置の1方向の出力(=加えた力)
力を 加える 力を ぬく
定常トルクの目標値 最小トルク 比
Weber
・・・ (2.2)) 3 (
1 min
3 1
maxi T i
T
i
最小トルク ・・・ (2.1)
- 0.5 0.3
0.2
-
回内 回外 回内 回外
0.1
定常トルク(目標値)Nm
尺屈 尺屈 力の方向
中高年 男性 女性 若年 男性 女性 被験者
- 0.5 0.3
0.2
-
回内 回外 回内 回外
0.1
定常トルク(目標値)Nm
尺屈 尺屈 力の方向
中高年
男性
女性
若年
男性
女性
被験者
4)n 倍の力(Weber-Fechner の法則)のデータ計測
被験者は自身の力の感覚を頼りに、基準値の n 倍のトルクを出すタスクを閉 眼にて行った。図 2.5 に操作タスクの例を示す。加えた力が基準値よりも低い 場合は低周波の、高い場合は高周波のビープ音がフィードバックされる。被験 者は基準値付近で力の微調整を行い、音の切り替わりから基準値の力の大きさ を認識し、その n 倍と思うトルクを 3 回出すタスクを行った(以下、n 倍トル ク実験)。式 2.3 に計測トルクの計算式を、式 2.4 に力の倍率の計算式を示す。
また表 2.3 に計測条件を記す。
図 2.5 基準値に対して n 倍の力を出すタスク
(基準値の 2 倍と思う力を発揮した例)
Tn1 Tn2 Tn3 力を加える
(高周波 ビープ音)
力をぬく
(低周波 ビープ音)
基準のn倍 と思う力
(1回目)
(2回目) (3回目)
トルク実測値(Nm)
基準値 力入力装置の1方向の出力(=加えた力)
時間
倍トルク
( )
3 1
3
1
i
n
i T
n ・・・ (2.3)
基準値
力の倍率
n
倍トルク・・・ (2.4)
5)統計処理
最小トルク実験、n倍トルク実験ともに、計測データは統計処理ソフト SPSS
(エス・ピー・エス・エス社、ver.16.0J)にて、被験者群の年齢および性差、
力の方向の検討を行うために分散分析を行った。主効果が有意な場合は、最小 有意差法による多重比較を行った。なお危険率 5%以下を統計的に有意とした。
表 2.3 n倍トルク実験の計測条件
3倍 基準値に対する
力の倍率
0.5 2倍 倍
回内 回外 回内 回外
0.3Nm
(1倍)
基準値
尺屈 尺屈 力の方向
中高年 男性 女性 若年 男性 女性 被験者
3倍 基準値に対する
力の倍率
0.5 2倍 倍
回内 回外 回内 回外
0.3Nm
(1倍)
基準値
尺屈 尺屈 力の方向
中高年
男性
女性
若年
男性
女性
被験者
2.3.結果 1) 最小トルク
図 2.6 に計測した 3 方向(A:尺屈、B:回外、C:回内)の最小トルクの比較 を示す。全体の傾向として最小トルクは、若年男性では小さく、中高年女性で は大きい。そこで力の方向、年齢、性別、定常トルクの 4 要因の分散分析を行 った結果、力の方向の主効果(F(2,261)=0.83, n.s.)および力の方向の交互作 用は有意でなかった。そこで力の方向の要因を繰り返しデータとし、年齢、性 別、定常トルクの 3 要因の分散分析を行った。その結果、年齢(F(1,285)=32.0, p<0.01)、性別(F(1,285)=12.0, p<0.01)、定常トルク(F(3,285)=38.0, p<0.01)
の主効果はともに有意であった。一方、交互作用には有意なものはなかった。
図 2.7 にこの 3 方向の最小トルクを、被験者群別にまとめた結果を示す。
図 2.6 A:尺屈、B:回外、C:回内の最小トルクの被験者群の比較
(平均値と標準偏差)
若年男性 若年女性 中高年男性 中高年女性 若年男性 若年女性 中高年男性 中高年女性
【尺屈】
0 0.02 0.04 0.06 0.08
トルク実測値(Nm)
0.1 0.2 0.3 0.5 定常トルク(Nm)
【回外】
0 0.02 0.04 0.06 0.08
トルク実測値(Nm)
0.1 0.2 0.3 0.5 定常トルク(Nm)
A B
0.100 0.02 0.04 0.06 0.10
トルク実測値(Nm)
0.1 0.2 0.3 0.5 定常トルク(Nm)
0.08
C
【回内】
統計処理と図 2.7 より、最小トルクの特徴として以下の結果を得た。
尺屈、回内、回外の力の方向では、最小トルクの差がない
若年群と中高年群の比較では、若年群にて最小トルクは小さい
若年群にて性差があり、男性にて最小トルクは小さい。一方、中高年群 では性差はない。
定常トルクが大きくなると、最小トルクも大きくなる(定常の力を出す ほど、微小な力の制御が難しくなる)
2) Weber 比
図 2.8 に、最小トルクより計算した 3 方向(A:尺屈、B:回外、C:回内)の Weber 比の比較を示す。若年群と比較して、中高年群の方が Weber 比の値と標準 偏差が大きいことが分かる。そこで最小トルクと同じく、力の方向、年齢、性 別 、 定 常 ト ル ク の 4 要 因 の 分 散 分 析 を 行 っ た 結 果 、 力 の 方 向 の 主 効 果
(F(2,261)=0.44, n.s.)および力の方向の交互作用が有意でなかった。そこで 力の方向の要因を繰り返しデータとし、年齢、性別、定常トルクの 3 要因の分 散分析を行った。その結果、年齢(F(1,285)=41.5, p<0.01)、性別(F(1,285)=8.34,
図 2.7 3 方向の力をまとめた、最小トルクの被験者群の比較 図中の「*」は多重比較にて有意差が得られたもの
(平均値と標準偏差。†<0.1、*p<0.05、**p<0.01)
若年男性 若年女性 中高年男性 中高年女性 若年男性 若年女性 中高年男性 中高年女性
0 0.02 0.04 0.08 0.10
トルク実測値(Nm)
0.1 0.2 0.3 0.5 定常トルク(Nm)
**
**
**
**
**
0.06
†
p<0.01)、定常トルク(F(3,285)=64.9, p<0.01)の主効果は有意であった。一 方、交互作用には有意なものはなかった。図 2.9 に、この 3 方向の Weber 比を 被験者群別にまとめたものを示す。
統計処理と図 2.9 より、Weber比の特徴として以下の結果を得た。
尺屈、回内、回外の力の方向では、Weber比の差がない
若年群と中高年群の比較では、若年群にてWeber比は小さい
若年群にて性差があり、男性にてWeber比は小さい。一方、中高年群では 性差はない。
若年被験者では、定常トルクが大きくなると、Weber比も小さくなり 0.1 付近に収束する
【回内】
0 0.2 0.3 0.4 0.6
Weber比
0.1 0.2 0.3 0.5 定常トルク(Nm)
0.5
0.1
【尺屈】 【回外】
0 0.2 0.3 0.4 0.7
Weber比
0.1 0.2 0.3 0.5 定常トルク(Nm)
0.5
0.1 0.6
若年男性 若年女性 中高年男性 中高年女性 若年男性 若年女性 中高年男性 中高年女性
A B
C
0 0.2 0.3 0.4 0.7
Weber比
0.1 0.2 0.3 0.5 定常トルク(Nm)
0.5
0.1 0.6
図 2.8 A:尺屈、B:回外、C:回内のWeber比の被験者群の比較
(平均値と標準偏差)
3) Weber-Fechner の法則
基準値(0.3Nm:1 倍)に対する力の倍率(0.5、2、3 倍)の目標値と実測値 の対応を図 2.10(A:尺屈、B:回外、C:回内)に示す。力の倍率の目標値と実測 値は線形に近く、また倍率が大きくなるほど標準偏差が大きくなっている。そ こで力の方向、年齢、性別、力の倍率の 4 要因の分散分析を行った結果、力の 方向の主効果(F(2,261)=2.68, p<0.1)が有意傾向であった。
そこで、力の方向毎に年齢、性別、力の倍率の 3 要因の分散分析を行った。
その結果、尺屈(図 2.10A)では、年齢(F(1,87)=1.53, n.s.)の主効果は有意 ではないが、性別(F(1,87)=3.35, p<0.1)の主効果は有意傾向であり、女性の 方が男性よりも大きな力を出す傾向があることが分かった。また力の倍率
(F(2,87)=23.3, p<0.01)の主効果は有意であった。一方、交互作用には有意 な も のは なか った (年 齢と 性別 ( F(1,87)=0.10, n.s. )、 年齢 と力 の倍 率
(F(2,87)=0.51, n.s.)、性別と力の倍率(F(2,87)=1.86, n.s.)、年齢と性別 と力の倍率(F(2,87)=0.07, n.s.))。
回外(図 2.10B)では、年齢(F(1,87)=0.30, n.s.)と性別(F(1,87)=0.07, n.s.)
の主効果は有意でなく、力の倍率(F(2,87)=82.6, p<0.01)の主効果は有意で あった。また交互作用に有意なものはなかった。
0 0.1 0.2 0.4 0.7
Weber比
0.1 0.2 0.3 0.5 定常トルク(Nm)
0.3 0.6 0.5
** *
**
**
** **
若年男性 若年女性 中高年男性 中高年女性 若年男性 若年女性 中高年男性 中高年女性
図 2.9 3 方向の力をまとめた、Weber比の被験者群の比較 図中の「*」は多重比較にて有意差が得られたもの
(平均値と標準偏差。*p<0.05、**p<0.01)
回内(図 2.10C)では、年齢(F(1,87)=0.90, n.s.)と性別(F(1,87)=1.36, n.s.)
の主効果は有意ではなく、力の倍率(F(2,87)=49.9, p<0.01)の主効果は有意 であった。また交互作用に有意なものはなかった。
尺屈では性別に有意傾向が見られたが、その他では年齢、性別に有意差は得 られなかった。この原因のひとつは、これは力の倍率が大きくなるほどデータ の標準偏差(被験者間のバラツキ)が大きいことが影響していると考えられる。
3 方向ともに計測データの年齢、性別の有意差が無いことから、力の方向毎に 計測データをまとめたものを図 2.11 に示す。図には目標値と実測値が 1:1 の線 と、Weber-Fechner則に基づく予測値(べき乗)を追加している。図 2.11 より、
図 2.10 A:尺屈、B:回外、C:回内の力の倍率の被験者群の比較 図中の「*」は多重比較にて有意差が得られたもの
(平均値と標準偏差。*p<0.05、**p<0.01)
【回内】
0 4 6 8 12
力の倍率(実測値)
0.5 2 3
力の倍率(目標値)
2
【尺屈】 【回外】
A B
C
10
0 2 3 5
力の倍率(実測値)
0.5 2 3
力の倍率(目標値)
1 4
0 4 8
力の倍率(実測値)
0.5 2 3
力の倍率(目標値)
2 6
若年男性 若年女性 中高年男性 中高年女性 若年男性 若年女性 中高年男性 中高年女性
**
*
**
**
**
**
**
**
**
3 方向の傾向は、1:1 の線形に近く、今回の実験条件では、Weber-Fechnerの法 則(べき乗)は成り立たないと考えられる。
また力の方向と力の倍率(目標値)の 2 要因の分散分析を行った結果、力の 方向(F(2,288)=2.45, p<0.1)の主効果が有意傾向であり、多重比較では有意 差がある組合せはなかった。また力の倍率(F(2,288)=102.0, p<0.01)の主効 果が有意であり、交互作用は有意ではなかった(F(4,288)=1.66, n.s.)。よっ て、3 方向の力の大きさの感覚は同等と考えられる。
2.4.考察 1)Weber の法則
Weber の法則の特徴は、ベースとなる刺激の強度レベル(本実験では定常トル ク)増加とともに、以下の傾向を示すことである。
① 刺激変化の知覚量(本実験では最小トルク)が増加する
② Weber 比(式 2.2)は一定の値に収束する
若年群、中高年群ともに①の傾向については、図 2.7 より明らかであり、②は 図 2.9 からWeber比は一定の値(0.1~0.2)に収束する傾向を示している。よっ て手によるトルクにおいても、Weberの法則が成り立つ可能性が示された。
図 2.11 尺屈、回外、回内の力の倍率の比較(平均値と標準偏差)
図中の破線は、目標値と実測値が 1:1 の比と、Weber-Fechner則に基づく 予測値(べき乗)を示す
1:1
0 4 8
力の倍率(実測値)
0.5 2 3
力の倍率(目標値)
2 6
10
尺屈回外 回内 Weber-Fechner
則に基づく値
なお中高年群の変化の傾向からは、定常トルク 0.4~0.5Nm での計測を行なえ ば、Weber 比は収束する傾向が見られると思われる。ただし、この水準では最小 トルク発揮のタスクを継続できない被験者も増えるため、実験方法の工夫が必 要である。
2)Weber-Fechner の法則
Weber-Fechnerの法則の特徴は、感覚量と実測値がべき乗の関係(式 1.2、図 2.11 参照)となることである。図 2.9 より今回の実験結果においては、被験者 間のバラツキが大きく、平均値ではトルクの感覚量と実測値の関係が線形であ り、Weber-Fechnerの法則の特徴が見られなかった。よってWeber-Fechnerの法 則は成り立たない可能性が考えられた。
しかし力覚におけるWeber-Fechnerの法則に関して先行研究は少なく、参考と なる実験方法は非常に少ない。今回の実験方法では、力の倍率が大きい場合に 被験者間のバラツキが大きくなったことが影響していると考えられる。よって 力を出す感覚量が、線形なのか非線形なのか検討するためには、まず実験方法 などの工夫により、バラツキを減らすことが必要である。これは今後の課題と したい。
2.5.まとめ
本実験により、利き手(右手)により出される力の感覚特性において、以下 の結果を得た。
1) 最小のトルクは、Weber の法則の特徴を示す
2) 力の倍率に関しては、個人差のバラツキが大きく、Weber-Fechner の法則 の特徴が見られなかった
さらに結果には示していないが、最小トルクを加える方向と抜く方向を比較 した場合、性差、年齢差に関係なく、ほぼ同じ値であったP。これらの結果につ いては筆者の文献を参照されたい(向江, 2008a;向江, 2008b)。
よって、力を出す感覚の基礎データを得ることができ、さらに性差や年齢差 による違いについてもある程度明らかにすることができたと考えている。この ような基礎データを計測・整理することで、将来的には力を出しやすい、微小 操作を行いやすい観点からの操作系の設計などへの展開が期待できる。
2.6.引用文献
1) 向江秀之ほか. 手先力解析によるステアリング操作性の評価. 自動車技術会学術講 演会前刷集, 55-03: 13-16,2003
2) Mukae H. Ergonomic analysis for layouts of steering unit on forklift truck.
International Workshop on Safety and Comfort in Vehicles: 63-66, November6-7, 2006
3) 雨宮良之, 向江秀之ほか. フォークリフト用小径ステアリングホイールの人間工学 的検討. 豊田自動織機技報, 54: 49-53, 2007
4) 佐藤方彦監修. 人間工学基準数値数式便覧. 技報堂出版, 1992
5) (独)製品評価技術基盤機構 人間特性データベース(オンライン).
http://www.tech.nite.go.jp/human/index.Html
6) Johansson RS, et al. Somatosensory control of precision grip during
unpredictable pulling loads. I. Changes in load force amplitude, Experimental Brain Research, 89: 181-191, 1992
7) 大山正ほか編. 新編感覚知覚心理学ハンドブック. 誠信書房, 1994
8) 藤本英雄ほか. 指先における一定力と弾性力に対する弁別閾測定, ヒューマンイ ンタフェース学会論文誌, 2(4): 67-72, 2000
9) Gescheider GA.著(宮岡徹監訳). 心理物理学 方法・理論・応用(上下巻). 北 大路書房, 2002
10) 村瀬智彦ほか. 幼児の把握,肘関節の屈曲および伸展時の力量弁別特性と発揮力量 との対応関係. 体力科学, 43: 104-112, 1994
11) 山口恭平ほか. 人の能動的指先発揮トルクの計測とモデル化. 日本ロボット学会 学術講演会講演論文集, 2006
12) 向江秀之. ジョイスティック操作系検討のための手の能動的な発揮力特性の基礎 研究. 日本生理人類学会誌, 13(2): 19-28, 2008a
13) 向江秀之. ジョイスティック操作系検討のための手の能動的な発揮力特性の基礎 研究-第 2 報 中高年者の発揮力特性-. 日本生理人類学会誌, 13(4): 25-34, 2008b
第3章
片手操作における微小振動付与の効果 の検討
3.1.本実験の目的
機器の操作において振動などのノイズは、操作のふられや手の痺れによる不 快感など、これまで操作を阻害するものと考えられてきた。しかし近年、ヒト が感じない強さの微小な振動や電気などのノイズを皮膚に加えると、その部位 の触覚が敏感になる(感度が向上する)確率共鳴現象が報告されており(Collins and Imhoff, 1996;Collins et al., 1997;Collins, 2003)、ヒトの感覚など 非線形なシステムにおいて、適度な強さのノイズは感覚を増強する効果がある ことが分かってきた。
さらに、足裏への微小な刺激により立位時の身体の動揺が減少し、バランス コントロールが改善される効果も報告されており、触覚だけでなく体性感覚に おいても確率共鳴現象の効果が示されている(Priplata et al., 2006;Ross et al., 2007)。
このノイズ付与による感覚増強効果が機器の操作においても生じ、操作精度 や操作のスムーズさが向上するならば、手術ロボットのような繊細な操作が要 求される作業や、加齢による感覚機能低下により、慣れ親しんだ機器の操作を 難しく感じるようになった高齢者にとって有益な支援技術になると考えられる。
さらに、操作デバイスへのノイズ付与にてその効果が得られれば、身体に刺激 装置を取り付ける必要が無いため、さらに実用性が高くなる。
そこでヒトの操作におけるノイズ付与の効果を、図 3.1 に示す随意運動モデ ル(川人, 1993)を基に考えてみる。操作において腕の姿勢や動き(筋長の変 位)に関する受容器は筋紡錘である。この筋紡錘に関しては、手首の腱へのノ イズ付与により手首の動きに対応する求心性インパルスが増加する結果が Cordo et al.(1996)により報告されている(第 1 章の図 1.5 参照)。つまり筋 紡錘に適切な強さの刺激を付与することが出来れば、筋長変位の分解能(感度)
が向上し、その結果、腕の位置フィードバック精度が向上することで、操作精 度や操作のスムーズさが向上する可能性が考えられる。
一方、位置フィードバックには時間遅れが生じるため、速い運動をフィード バック制御することは理論的に不可能とされている。よって操作精度向上が筋 紡錘の分解能向上によるものならば、その効果は、速い操作ほど見られなくな ると考えられる。
そこで本実験では、片手操作のデバイスへの微小振動の付与による、操作精 度向上の効果(正の効果)の可能性について、追従作業を対象に検討する。そ して追従成績から、微小振動付与の正の効果が得られる条件について考察する。
3.2.実験方法 1)実験装置
図 3.2 に実験に用いるグリップ操作装置を示す。被験者正面にディスプレイ があり、自動車用のシートに着座して操作する。把持するグリップ(φ35mm)
図 3.1 ノイズ付与による操作への影響のモデル
(川人の随意運動モデル(1993)を簡略化)
運動指令
(ニューロン)
目標軌道 生成
視覚フィードバック
追従動作
体性感覚フィードバック
(筋紡錘,腱紡錘)
作業成績
(軌道)
振動付与の効果の範囲 運動野
ノイズ付与の効果が 期待できる部分 筋
は右腕の正面に配置し、右前腕の回内、回外動作にて操作する。なお、前腕の 中立位(グリップの垂直位)をニュートラル位置(0°)とした。振動は、グ リップの回転(腕の回内、回外)方向に付与し、回転角度に対する反力、およ び摩擦は設定していない。この操作装置の機械的特性を図 3.3 に示す。操作方 向の切替時に約 0.02Nm の機械的な静摩擦(ヒステリシス)や操作途中にコギ ングがあるが、操作に影響するレベルではない。
被験者の情報として、グリップから上肢への振動の伝達を計測した。小型の 3 軸加速度センサ(日立金属製 H34C)を、図 3.4 に示すグリップ上、右手背、
右腕前腕の 3 ヶ所に貼り、サンプリング周波数 400Hz にて記録した。
図 3.2 実験装置の外観
図 3.3 グリップ操作装置のトルク実測データ 振動付与なし(黒線)と、
サイン波 10Hz×0.004Nm 振動(灰色線)を重ねて表示したもの シート
ディスプレイ
回内
回外 グリップ
(N位置)
反力 モータ トルク
計
0
-30 -20 -10 10 20 30 0
0.02 0.01
-0.01 -0.02
トルク実測値(Nm)
グリップ回転角度(deg)
振動なし 振動付与:10Hz×0.004Nm
静摩擦
±0.004Nm
2)操作タスク
トラッキング操作の画面を図 3.5A に、追従操作時の目標マーカーと追従マ ーカーの軌跡を図 3.5B に示す。グリップの回転角度は、ディスプレイ上の追 従マーカーの水平移動に変換して表示される。目標マーカーは、回転角±30deg の範囲を一定速にて左右に往復し、そのうちグリップ操作による追従範囲を±
25°とした。この回転角±25°の範囲は、視野角では±35°程度に相当する。
また回転速度の違いによる振動付与の効果の違いを検討するため、目標マーカ ーの速度を低速(5deg/s)と高速(10deg/s)の 2 水準設定した。
被験者はグリップの回転操作にて追従マーカーを左右に移動し、目標マーカ ーに重ねた状態を維持する。1 回の作業時間は 120 秒である。作業成績として、
目標マーカーと追従マーカーの偏差(追従誤差)をサンプリング周波数 60Hz にて計測した。
図 3.4 操作姿勢と加速度計測部位(3 ヶ所)
手背加速度 前腕加速度
グリップ 加速度
回転軸 振動の伝達
3)振動条件
確率共鳴の振動刺激には、ホワイトノイズが用いられる場合が多い(Collins and Imhoff, 1996;Collins et al., 1997;Collins, 2003;Priplata et al., 2006)。しかし本実験では周波数の差異の影響を検討するため、振動刺激はサイ ン波の単振動を用いた。また振動は感覚量のため、スチーブンスのべき乗の法 則に基づき刺激条件を設定した。
・ サイン波の周波数:10Hz を基準に 2 倍と 4 倍の 3 水準(10,20,40Hz)
・ 振幅:0.004Nm を基準に 2 倍と 4 倍の 3 水準(0.004,0.008,0.016Nm:制御 の設定値にて。なお 0.004Nm 条件の振幅は±0.004Nm である(図 3.3 参照))
の計 9 条件に振動なしの条件を加えて、振動条件は計 10 条件とした。
なお周波数条件は、上肢全体(10Hz)、前腕~肘(20Hz)、掌(40Hz)の共振 周波数にも対応している(玉置ら, 2001)。また振幅 0.004Nm はグリップの振動 を手でわずかに感じるレベルである。また 40Hz 以上の周波数では、振動の違い が分かりにくくなるため、最大の周波数を 40Hz とした。
図 3.5 A:トラッキング操作画面 B:追従操作の軌跡の例 目標マーカー
追従マーカー
+25°
-25°
追従誤差
0 10 20 30 グリップ角度(°)
-10 -30 -20
時間
定常区間
回外の動き
回内の動き
目標マーカー の軌跡
追従マーカーの軌跡
A
B
4)実験手順
被験者は年齢 23~60 歳の健康な男女 8 名である(平均 38.3±12.7 歳、うち 女性 2 名)。被験者には事前に本研究内容やリスク、実験中止の自由など被験 者に不利とならない倫理的配慮について説明し、実験参加への同意を得た。
回内、回外の操作は、肘の関節角度にて使われる筋が異なり、また操作中に 肘の位置が大きく動くことがないように、図 3.4 のように前腕は水平に、肘の 関節角度は約 120°の姿勢に統一した。なおグリップの把持力は各被験者が操 作しやすい強さとした。
実験条件は、回転速度 2 水準(5deg/s、10deg/s)×振動 10 条件(周波数 3 水準×振幅 3 水準+振動なし)の計 20 条件である。実験の順番はランダムと し、トラッキング操作の練習を十分行った後にデータ収集を行った。
5)データ解析
回転操作の範囲±25°には、一定の回転速度を維持する定常操作と、停止と 動き出しを行う過渡操作の両方が含まれる。そこで以下の基準にて定常と過渡 の区間を分け、今回は定常区間を解析対象とした。
・ 定常区間(-20°<回転角θ<20°)
・ 過渡区間(θ≦-20°,20°≦θ)
また計測時間 120 秒のうち、初めの 30 秒を操作が安定するまでの時間とし て解析対象から外し、後半 90 秒の定常区間の追従誤差(作業成績)の平均値 を求めた。
加速度は、信号処理ソフトウエア Matlab(MathWorks 社)を用いて、後半 90 秒の 3 軸の加速度の和に対してフーリエ変換によるスペクトル解析(welch 法 の FFT)を行い、パワースペクトル密度(PSD)を求めた。
追従誤差の平均値、および加速度のパワースペクトル密度は、統計処理ソフ ト SPSS(エス・ピー・エス・エス社、ver.16.0J)にて、回転速度、周波数、
振幅の 3 要因の分散分析を行った。主効果に有意差が得られた場合、最小有意 差法による多重比較を行い、危険率 5%以下を統計的に有意とした。