平成
16 年度卒業論文
脊柱湾曲を考慮した腰痛防止のための車椅子の設計
指導教員 井上喜雄 教授 芝田京子 講師 高知工科大学工学部知能機械システム工学科 知能機械力学研究室 1050135 正田 啓博目次
1.はじめに ...2 2.車椅子の現状 ...3 2.1 種類 ...3 2.2 簡易車椅子 ...4 2.3 電動車椅子 ...5 3.腰痛と脊柱彎曲...6 3.1 医療現場より(3)...6 3.2 カイロプラクティック(4)(5)...7 4.車椅子における座位姿勢と骨盤の関係...9 4.1 立位における理想的姿勢 ...9 4.2 座位姿勢と骨盤の関係 ... 10 4.3 骨格構造による骨盤回転... 10 5.モデリング... 12 5.1 人体モデリング ... 12 5.2 骨格系... 14 5.2.1 脊椎・骨盤 ... 14 5.2.2 腰椎モデル ... 16 5.2.3 胸椎モデル ... 18 5.2.4 頚椎モデル ... 18 5.2.5 骨盤モデル ... 20 5.2.6 脚部・頭部・腕モデル ... 23 5.3 筋系 ... 28 5.3.1 筋の種類 ... 28 5.3.2 筋モデルの配置... 31 5.4 質量系 ... 39 5.4.1 各モデルの質量定義 ... 39 5.4.2 質量についての考察 ... 40 5.5 車椅子のモデリング ... 42 6.考察...43 6.1 シミュレーション方法 ... 43 6.2 シミュレーション結果の検討... 44 7.おわりに... 47 謝辞... 48 参考文献... 491.はじめに
高齢化社会を迎え車椅子の需要が増し座位姿勢を長時間強いられることが予想されるが, 現状では利用者の多くが腰痛の悩みを抱えている.医療現場において腰痛の 90%は姿勢性 腰痛症と呼ばれ,いわゆる姿勢が悪いことが原因で背骨が歪み神経を圧迫するためだと言 われている.姿勢の改善で痛みが引くことから治療法は姿勢を正すことである. また,カイロプラクティックでは人体の骨格構造,とりわけ脊柱湾曲(背骨の S 字カーブ) における頚椎・腰椎部の12 の椎骨の理想的な位置関係が定義されており,姿勢の悪さをこ の理想的な位置からずれることであるとしている. そこで,背もたれに脊柱彎曲を持たせることで,面で体の重さを支えることが可能にな り,姿勢の崩れを軽減し,腰痛を防止できると考え,本研究では背もたれが理想の脊柱彎 曲の形をした車椅子を提案し,その有効性を検討する. 車椅子や腰痛や脊柱湾曲について調べた後,人体モデリング,一般の車椅子モデリング, 提案する車椅子モデリングを行い,人体モデルを 2 つの車椅子モデルに座らせたシミュレ ーションにより,提案する車椅子では腰痛が軽減されるかを検討する.2.車椅子の現状
2.1 種類 車椅子は大きく分けて2 種類に分類出来る(図 2.1).1 つは自走式車椅子であり,もう 1 つは電動車椅子である.自走式は人間の力で操作,走行するものであり,いわゆる簡易車 椅子のようなものである.電動車椅子はバッテリーを積みモータの力で走行するものであ る. これらの分類は用途別に細かく分類出来る.例えば,自走式であるならば,一般的な簡 易車椅子や,介助者が押す必要がある介護用車椅子,スポーツ用に開発されたものなどが あり,電動車椅子にも移動用の他,立ち上がり介助用などがある. etc ⑤立ち上がり介助用 ④走行用 ③スポーツ用 ②介護式 ①簡易(折りたたみ式) 電動式 自走式 車椅子 種類 図2.1 車椅子の種類2.2 簡易車椅子 まず,基本である簡易車椅子を取り上げる. 簡易車椅子の概要を図2.2 に示す.
図2.2 簡易車椅子(1) 特徴 折りたたむことが可能で,誰にでも扱えるという利点がある.多くの場合,車椅子の座 面と背もたれは布張りである.たためないものに関しては固めの板が張られていることが ある.重量は約12kg からで,価格は簡易車椅子の場合 2∼10 万円台までである.
2.3 電動車椅子 次に,電動車椅子を図2.3 に示す.
図2.3 電動車椅子(2) 現在,その利便性から電動車椅子もかなり普及し始めているものの,それらの多くは簡 易車椅子にモータを付けたような実に簡単な構造をしている.そのため,その機能はおお まかな直進,後退,回転といった機能だけで,微調整は操縦者のボタン操作による調整の みとなっている. また,人体への影響(腰痛やその他の姿勢変化による障害)はほとんど考慮されていない. よって,人体への影響も考慮した車椅子の改善が必要である. そこで,本研究では車椅子利用者の悩みの一つである「腰痛」を踏まえた車椅子を制御 工学アプローチする. そして,腰痛を工学的にアプローチするための人体モデル,一般の簡易車椅子モデル, 本研究で提案する脊柱湾曲に添った背もたれを持つ車椅子モデル作成を目的とし,提案す る車椅子の有効性を検証する.
3.腰痛と脊柱彎曲
腰痛を工学的に考えるための指標を決める. そこで,まず医療現場からの種々の指標について考察する. 3.1 医療現場より(3) 日本における医療現場では腰椎について「腰痛患者の9 割は姿勢による筋肉の疲れが原因 である」と考えられている.簡単にまとめると以下の通りである.・姿勢性腰痛症 → 姿勢の改善
腰痛でも安静だけで治るものが多く,ひどい場合にのみ手術が必要なのである. 姿勢の改善で痛みが引くことから,姿勢と腰痛の関係が大きいとする. この姿勢による腰痛を「姿勢性腰痛症」といい,筋の疲れが原因と考えている. よって,腰痛医療現場では正しい姿勢を「腰の筋を疲労させないような姿勢」と定義して いる. しかし,腰痛を工学的にアプローチするには曖昧すぎて,指標にすることは困難である. そこで,更なる指標を得るため調査した結果,カイロプラクティックの世界に大変興味 深い腰痛に対する定義の仕方を見出した.それを次に紹介する.
・骨のずれや
神経圧迫など → 温熱治療,牽引
・90%以上手術不要
腰痛
・腰椎椎間板ヘルニア
・10%以下手術必要
・腰椎椎間関節症
・腰椎捻挫
・骨折
→手術
・悪性腫瘍の脊椎への移転
・腰椎カリエス
etc.
3.2 カイロプラクティック(4)(5) カイロとは‘手(ギリシャ語:kheir)’を表し,プラクティックとは,‘技術・医療(ギリシ ャ語:praktikos)’を表す.つまり,カイロプラクティックとは‘手技療法’という意味で ある.これは読んで字の如く,人の手を使い体の悪い部分を治す(脊椎・骨盤矯正)ことであ る. カイロプラクティックでは,人間の様々な運動器官の中でとりわけ脊椎と骨盤に注目し, これらの‘ずれ’が万病のもとと考えている.このずれを手技によってもとの状態に治す のである. 現在,アメリカにおいてカイロプラクティックは医学の一部と位置付けられている. 次に基本理念として,人間の身体は地面に対して直立に立っている.これは人類の進化 の過程で,2 の腕を自由に使うために四足歩行から二足歩行へと進化してきた結果である. そして,この過程で人間の背骨は S 字に曲げられてきた.そのおかげで,頭からの重量を 分散でき,骨盤への負担を和らげられるようになった.人類の脳がこれほどまで大きく発 達できたのもこの恩恵にほかならない. よって,人間の本来あるべき姿は,背骨が S 字を描いている状態であると定義する.こ のS字の湾曲を脊柱湾曲と言う. 周知の通り,背骨の中には脊髄という脳の一部である大切な神経が通っている.もし, 姿勢が悪くなり背骨が歪んだ場合,この中に通っている神経を直接圧迫しないまでも,脊 髄から枝分かれしている神経を圧迫し,痛みや痺れを感じる.場合によっては坐骨神経痛 や内臓疾患になり,その痛みから逃げるために,身体が自然と曲がり始め身体のバランス を崩し,筋肉の疲れや,骨の変形などを引き起こしたりと,思わぬ事態に成りかねない. このように,背骨のずれによる神経圧迫が病気の源であると考える.これを「神経圧迫論」 という. カイロプラクティックでは,この背骨とそれを支える土台となる骨盤の矯正をすること により,結果的に痛みがとれたり,本来人間が持つ「自分で病気を治す力=自然治癒力」が発 揮できたりして,様々な病気が治ると考えている. さらにカイロプラクティックの治療は人間の骨の形状,関節の動きなど,ありとあらゆ る側面から考え,科学的根拠に基づいて治療する. この考え方は非常に理にかなっており,工学的に考えやすいため,本研究ではこのカイ ロプラクティックの考え方を参考に進めていく.
今までの考察を下記にまとめる.
腰痛を工学的に考えるための指標
↓
医療現場
腰痛患者の
9 割は姿勢による筋肉の疲れが原因 → 「姿勢性腰痛症」
∼正しい姿勢の定義∼
・腰の筋肉を疲労させないような姿勢
工学的に考えるための指標としては曖昧すぎる
→他の指標を
↓
カイロプラクティックの世界
カイロ
:手(ギリシャ語:kheir)
プラクティック
:技術・医術(ギリシャ語:praktikos)
→カイロプラクティック
= 手技療法
発祥
:アメリカ(医学の一部として位置付けられている)
↓
脊椎と骨盤のずれによる神経の圧迫が原因 → 「神経圧迫論」
∼正しい姿勢の定義∼
・背骨の
S 字カーブ「脊柱湾曲」が保たれる姿勢
↓
工学的指標になりうる
本研究は,カイロプラクティックの考え方に基づき進める
目標:脊柱湾曲の維持・骨盤の維持
4.車椅子における座位姿勢と骨盤の関係
4.1 立位における理想的姿勢 座位姿勢を考慮する前に基本となる,直 立姿勢の理想的状態を述べる. 直立姿勢における理想的な姿勢という ものは,3 章で述べた脊柱湾曲と骨盤が理 想の状態にある姿勢をいう. 次に,理想の状態とはどのような状態な のかを述べる. 立位において理想とされる姿勢時の脊 柱湾曲の湾曲半径と骨盤の傾き角,そして, 重心線が求められている. まず,脊柱湾曲の湾曲半径はそれぞれ, 頚椎カーブは,体の前方に向かって半径約 17cm,胸椎カーブは体の後方に向かって 約32∼33cm,腰椎カーブは 19∼24cm と されている.この値は,平均椎骨長と関節 の角度から計算しても大体この値になる. つまり,統計的に見ても,解析的に見ても ほぼ同じ値と言ってよい. 次に骨盤の傾斜角度であるが,正確に言 うと,骨盤に付く仙骨と第5 腰椎との接し ている角度のことである.この傾斜角度は 30∼35°とされている. そして重心線は様々な説があるが,本研 究では 耳→肩→腸骨頂上→膝関節→く るぶし を通る線とする. この脊柱湾曲があるおかげで,骨盤にか か る 重 量 を 分 散 す る こ と が で き る.そのため人間は思い頭を支えることが で き , 直 立 歩 行 が 可 能 に な っ た の で あ る.しかし,腰で体重を支えているために 腰痛とは切っても切れない縁なのである. 図4.1 脊柱湾曲(4)4.2 座位姿勢と骨盤の関係(17) 座位姿勢における理想的状態は,立位と同様に骨盤の傾きと脊柱湾曲が保たれた状態で ある.この姿勢が保たれれば,腰痛になりにくいとされている. しかし,実際は車椅子利用者の姿勢を見ると患者の多くに姿勢の崩れが確認される.こ の原因の一つに車椅子の構造上の問題が挙げられる.これは,車椅子,特に簡易車椅子に おいてその座面と背もたれが布製であるがゆえに,布の
‘
たわみ’から姿勢を崩すと考え
られる. この姿勢変化のプロセスを簡単に述べると, 布製座面により骨盤が不安定になる →骨盤に左右傾斜や後方回転が生じる →腰椎に湾曲がなくなる →それに伴い胸椎の湾曲半径も増大 →頭が前方にでる(顎を突き出す) →身体バランス悪化 と変化していく.その結果,腰痛やその他の身体障害へとつながるのである. そこで,この布製座面と背もたれに板を付け,‘たわみ’を取り除くと骨盤が安定し,姿 勢の崩れが減少するのである. 4.3 骨格構造による骨盤回転 先程板を入れると姿勢の崩れが減少すると言ったが,板を入れても完全にもとの状態に 戻すことは出来なかった.これは,体の構造上の問題としてまず骨盤と足の付け根の位置 関係に問題がある. ここで,図4.2 を見てもらいたい.この図からも分かるように体の重心線は脚の付け根(股 関節)の後ろを通ることになる.つまり,骨盤はこの重心と股関節の回転軸との関係で「て この原理」で後方へ回ることになる.したがって,骨盤回転は人間の骨格構造上どうして も起きてしまう現象といえる.この回転を自力で止めるには,やはり筋の作用でくい止め るほかない.図4.2 股関節の軸に対する重心線の位置(6)
この骨盤回転の様子と,それに伴う腰椎の変化を図4.3 に示す.
① 座った直後の骨盤 この時点では腰椎に湾曲がある
。
② 股関節が骨盤の前方に位置する ため骨盤はシーソーの如く後方に 回転する。 ③ 骨盤が回転したまま体を起こすと 腰椎に湾曲が無くなり,椎間板に 負担をかけたり,場合によっては 神経を圧迫したりする. 体のバランスも崩れる. 図4.3 骨盤回転と腰椎5.モデリング
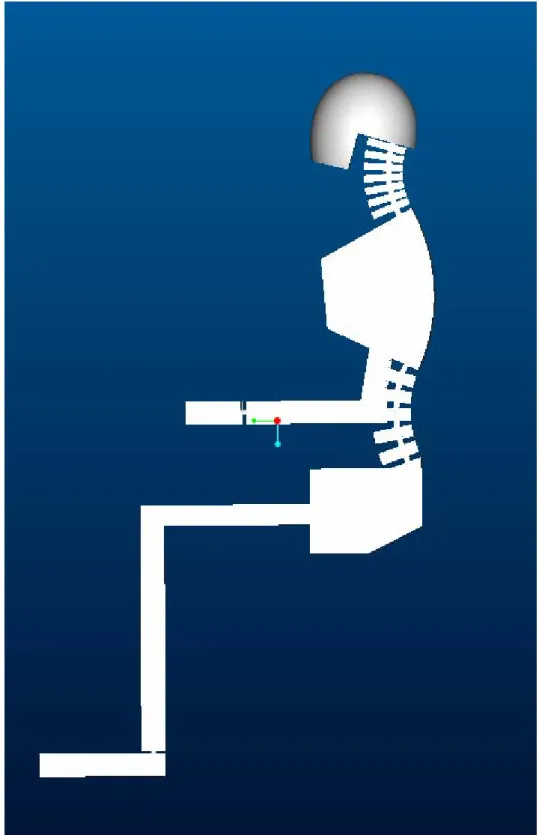
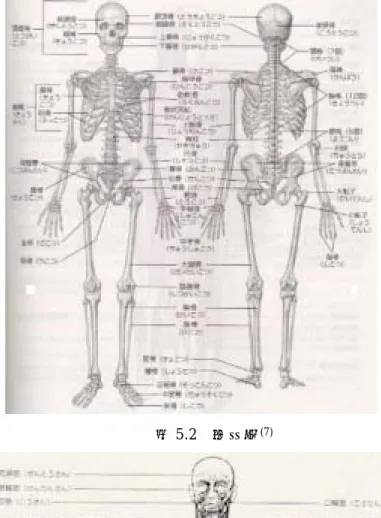
5.1 人体モデリング 腰痛を工学的に解析するために人体モデリングを行っていく. まずは,人体の全体像を図5.1 に示す. 人体の構成を見るとモデル化を考える場合,骨格系図5.2,筋系図 5.3,その他内臓など の質量系と 3 つに分けられる.最初に骨格の考察から始める.モデリングはすべて Pro/ENGINEER を用いて作成した.図5.1 人体外観(7)
図5.2 骨格系(7)
5.2 骨格系 5.2.1 脊椎・骨盤 骨格系において,今回特に注目すべきところが脊椎・骨盤周辺である.先に述べてきた ように,本研究では腰痛の原因として脊椎・骨盤の歪みを特に注目している.したがって, この脊柱・骨盤モデルは出来る限り詳細にモデル化していく必要がある. まず,脊椎についてモデル化を図る.脊椎を図5.4 に示す. 脊椎は頚椎,胸椎,腰椎から成る.脊柱全体の特徴として 3 章で述べたように脊柱湾曲 というものがある. これは,人間が直立するために欠かせないものである.そして,この脊柱湾曲には湾曲半 径が決まっている.その半径は上から 頚椎 R=17cm 胸椎 R=32∼33cm 腰椎 R=19∼22cm である(図 5.5).そして,もう少し詳しく見ると,頚椎と胸椎は水平方向から約 30 度の角度 で接している.胸椎と腰椎は約20 度である.そして,腰椎と骨盤との接点は約 30∼35 度 の角度を持っている.
図5.4 脊柱(6)
(a)概略図 (b)前後可動域 図5.5 脊柱湾曲(4) 図 5.6 脊椎の役割(6) 脊椎それぞれに役割がある.頚椎は主に頭を前後左右に動かすためにあり,一番上にあ る頚椎 1 番(C1)は頭を上下左右前後自由に動かすことが出来る.胸椎には肋骨がついてい るために前後へはほとんど動くことが出来ず,体をねじる運動を担う.腰椎は前後に大き く動き,体の前屈後屈を担う重要な要素である.この概略を図5.6 に示す. この図より,本研究では体の前後方向のみを考慮するため,胸椎部にはほとんど前後の 自由度が無いことから,この部分は一つの質量としてのみ考えることとする.そして,頚 椎と腰椎を特に詳しくモデリングしていくこととする.
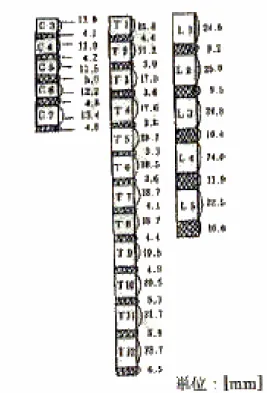
5.2.2 腰椎モデル まず,図5.7-a に腰椎のレントゲン写真とそれを基にしたイラストを図 5.7-b載せる. このイラストよりモデルを作る.その際に形を忠実に作ることも重要ではあるが,ここ では,腰椎の動きの特徴を捉えるためのモデル作りが望まれる.そこで,胸椎の動きを再 現するため以下のようなモデルを作成した. モデルの特徴 ・ 腰椎の横断面図は長方形とし,椎間板が乗る部分は正方形とする. ・ 関節部分は中心から後ろにずれた位置に配置する. ・ (a) 腰痛レントゲン写真(8) (b) 詳細イラスト(9) 図5.7 実際の椎骨 ・第一腰椎(L1)から第五腰椎(L5)下の椎間板までの長さは図 5.8 に示すように 17.15cm と する. ・腰椎の脊柱湾曲半径を22cm(腰椎の中心を通る),17.15cm を湾曲の弧の長さとし計算し た結果湾曲中心角度45°とした. ・腰椎はL1∼L5 まで同じものを用い,上記の数値に適合するように配置した. 以上の条件で作成した腰椎モデルを図5.9 に示す.
図5.8 各椎骨と椎間板の長さ(6) (a) 椎骨(10)
(b) 椎骨モデル (c) L1-L5 モデル 図5.9 腰椎モデル
5.2.3 胸椎モデル 次に胸椎領域を考察する.図5.10-a から分かる通り,胸椎は肋骨と関節をいとなみ胸部 の一部をなすので,実際の運動は制限される.このことより,前後の運動には,胸椎はほ とんど関与しないものとし,一つの質量としてモデル化する.このモデルを図5.10-b に示 す.なお,胸椎の湾曲半径は32∼33cm で,弧の長さは 28.05cm である.
(a) 胸部(11) (b) 胸部モデル 図5.10 胸部モデル 5.2.4 頚椎モデル 次に頚椎についてモデリングする.頚椎も腰椎同様可動範囲が大きいため,人体のバラ ンスに大変影響を及ぼす.よって,頚椎も詳細にモデル化する必要がある. 図5.11-a に示したのが頚椎解剖図である.頚椎は 7 つの椎骨からなり,その椎骨は腰椎 に比べると大変薄いものである.しかし,基本的構造は腰椎と似ている.最も異なる点は 第 1 頚椎である.これは,頭をあらゆる方向へ自由自在に動かすための関節である.した がって,人が頭を回す運動をする際前後の動き以外はこの関節が担っている.しかし,本 研究では前後方向のみ考慮するため,この椎骨も他の椎骨と同様にモデル化する. 上記のことを考慮し,湾曲半径17cm,湾曲の弧の長さを 8.5cm とする.これより,頚椎 モデルを図5.11-b のようにした.
(a) 頚椎(12) (b) モデル 図5.11 頚椎モデル ここまでで,頚椎,胸椎,腰椎を合わせると図5.12 のようになる.これで,脊柱モデルが 出来上がった.
図5.12 脊柱モデル
5.2.5 骨盤モデル(16) 続いて脊柱の土台となる骨盤のモデルを考える. まず,医学的見地から骨盤を見ると図5.13 のようになる.
(a) 女性骨盤 (b) 男性骨盤 図5.13-1 骨盤(12)
図5.13-2 骨盤の基準線(12) 表5.1 各基準船平均長
女性
男性
骨盤高
[㎜] 190.8±0.48 204.5±0.74
最大骨盤幅 [㎜] 255.3±0.77 259.9±0.82
外矢状径
[㎜] 170.8±0.63 166.4±0.61
恥骨下角度
[°] 81.2±2.5 [70~90] 58.6±1.9 [50~60]
真結合線径
[㎜] 115.6±0.60 103.9±0.61
入口横径 [㎜] 123.3±0.49 117.7±0.43
前腸骨棘間径
[㎜]
224.83±0.83
腸骨稜間径
[㎜] 267.69±0.68
大転子間径
[㎜] 286.51±0.61
外結合線 [㎜] 190.00±0.44
上後腸骨棘間径
[㎜] 95.56±0.51
そして,図5.14(図 4.2 再掲)は骨盤と脚の関節との関係を示す. 4.3 節で述べたよう に,図5.14 より,股関節は重力線よりも前に着いていることが分かる.よって,骨盤には 後方に回転させられる力が生じる.
図5.14 骨盤と重力線の関係(7) さらに,骨盤の大部分を成す腸骨は片足を上げる,歩くといった動作のときにわずかでは あるがねじれの方向に動くことが分かっている.これからの特徴を踏まえて図5.15 のよう な骨盤モデルを作成した.
図5.15 骨盤モデル
5.2.6 脚部・頭部・腕モデル 次に脚部と頭部モデルであるが,ここは大まかなモデリングにとどめておく.ただし, 脚部においては後に筋肉による運動関係を考慮する. 脚部と頭部のモデルをそれぞれ図5.16,図 5.17 に示す.
図5.16 脚部モデル
(a) 頭部重心線(7) (b) 重心線を考慮した頭部モデル 図5.17 頭部モデル
次に腕モデルであるが,腕による姿勢の崩れへの影響は大きいものと考えられる. 姿勢が崩れた人の様子を見ると,一般的に猫背といわれる姿勢において,多くの場合肩 が前へ移動し,腕全体が前方に移動しがちである.この微小な変化でも体全体に対する影 響は大きい.なぜならば,腕の重量は体全体の13%を占め,上半身のみで比較するとその 重量は 20%もの割合を占める.そのため,肩・腕の位置変化によりその重心は移動し,体 全体の総合重心も移動してしまうことになる.よって,肩・腕のモデルは肩の移動を考慮 したものとする. まず,肩の構造について図5.18 に解剖図を示す. 次に図5.19 に肩甲骨の動きを示す. 肩甲骨は,背中(肋骨)の上にただ乗っている状態にある.その間には筋肉が付いており, その作用により背中(肋骨)上をすべるように動くのである.そして,体幹とは鎖骨のみで体 の前方の首下と繋がっている.そのため,肩甲骨自体が自由に動くことが出来,肩関節に よって腕をあらゆる方向へ動かすことを可能にしている.
(a) 後ろから見た肩甲骨の配置図 (b) 後ろから見た肩甲骨 図5.18 肩周辺の解剖図
(a) 停止位置 (b) 肩甲骨の挙上/下制 (c) 外転/内転 (d) 肩甲骨の上下回旋
(e) 外転(回動あり/無し) (f) 挙上(斜動あり/無し) 図5.19 肩甲骨の挙動
これら肩甲骨の動きから腕モデルを作成する.この腕モデルを作成するにあたって注意 すべき点は,骨格どおり忠実にモデリングをするのではなく,その動きを表現し得るモデ ルを作るということである. ここで,見てきたとおり,肩甲骨+腕というものはほぼ360°近くの範囲をカバーできる. そこで今回はより簡単化するため,肩モデルはレバー(棒)で表現し,体幹と腕を結ぶ.動き としては,正面から見た際,肩が上下に運動できるように,上から見た際に体幹側の接続 部分を回転中心とし回転運動を出来るようにする.さらに,肩モデルの先に着く腕モデル はその接合部で腕が回転できるようにする. 以上のことを考慮した時の肩・腕モデルは図5.20 のようになる.
(
a) 正面図 (b) 側面図(c) 上面図 図5.20 肩・腕モデル
以上の各骨格モデルを全て合わせると図5.21 のような全身骨格モデルが出来上がる.
5.3 筋系 5.3.1 筋の種類 筋といっても様々な種類がある.形状,機能,役割などによって,分け方は様々である. ここでは,簡単にその種類と各筋について説明する.
・紡錘筋
・随意筋(横紋筋)
・二頭筋
・不随意筋(平滑筋)
②機能による分類
・三頭筋
・特殊な筋(心筋)
・四頭筋
①形状による分類
・半羽状筋
・羽状筋
・多腹筋
③役割による分類
・骨格を支えるための筋
・鋸筋
・骨格を動かすための筋
①の分類は,図5.22 に示すような形による分類である. ②において人の意思で動かせる筋を随意筋という.腕を曲げるとか,脚を上げるなど,人 が何か動作をするときに使用される筋である. その逆に不随意筋は,人間の意思とは関係無く働く筋である.これは主に内臓を動かす ための筋である. 特殊な筋というのは心筋,つまり心臓を動かしている筋のみを指す.この筋は,自動能 をもつ特殊な横紋筋と位置付けられている. この3 種類の筋の特徴を表 5.2 に示す. 横紋筋は別名赤色筋と呼ばれ,実際の人体解剖図などを見ても赤い色をしている.
図5.22 形状による筋の分類(13) 表5.2 筋の機能による分類と特徴
随意筋
(横紋筋)
不随意筋
(平滑筋)
特殊な筋
(心筋)
骨格筋
内蔵筋
内蔵筋
随意筋
不随意筋
不随意筋
横紋あり
横紋なし
横紋無し
多核で長大
単核で紡錘型
単核で分岐
敏速な収縮
穏やかな持続的収縮
全体が敏速に収縮
疲労しやすい
疲労しにくい
疲労しにくい
最後に③の役割による分類であるが,これは人間モデルを作成するにあたって最も分か りやすい基準となる.役割は大きく分けて,神経を守るため脊柱や体幹を固定する働きを する筋と,姿勢を治すために働く筋の2 種類に分類される. この分類の方法を用いれば,筋モデルをより簡潔に表現することが出来る. そこで,固定する働きをする筋(不随意筋)はバネ・ダンパを組み合わせたモデルで表現し, 体を動かすための筋(随意筋)はアクチュエータ(動力源)としてモデル化する. ここで,本研究において体を動かすための筋というのはあくまで,座位における姿勢の 崩れを直すときに使われる筋とする. それぞれのモデルについて述べる. 筋モデルには様々な説があるが,本研究では,バネ・ダンパを一つずつ用いた最も簡単 なマスクウェル模型を採用する(図 5.23-a).これが,体を固定するために用いられる筋のモ デルとなる. 体を動かすための筋モデルであるアクチュエータは,今回は特に詳しく定義しない.こ れを(図 5.23-b)のようなシンボルマークで表記するのみとする. それでは次に,どちらの筋をどこに用いればよいか探るため,また,体の各セグメント(体 節)の運動関係を見出すために,あらゆる筋における解剖図を基にモデル化する.なお,モ デル化する際,体の前後方向の運動に関係するものだけを取り上げることとし,その他の セグメントをねじる動作のための筋肉などは無視する.
(a) マクスウェルモデル(14) (b) アクチュエータ 図5.23 筋モデル
5.3.2 筋モデルの配置 それでは次に,どちらの筋をどこに用いればよいか探るため,また,体の各セグメント(体 節)の運動関係を見出すために,あらゆる筋における解剖図を基にモデル化する.なお,モ デル化する際,体の前後方向の運動に関係するものだけを取り上げることとし,その他の セグメントをねじる動作のための筋肉などは無視する. はじめに,脊椎を守るために付着している筋について述べる.脊柱付近の筋の様子を図 5.24 に示す.
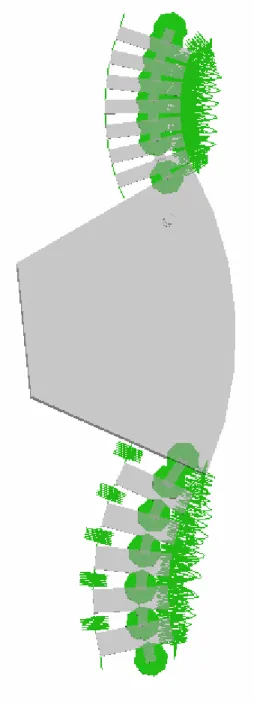
図5.24 脊柱を取り巻く筋 脊椎を取り巻く筋は数多く存在し,腰痛付近だけ取り上げてもその周辺のセグメント(体節) 全てと繋がっていることが分かる.例えば,腰椎1 番(L1)ならばその筋は骨盤と肋骨,胸椎, そして,L2,L3,L4,L5 と繋がっている. これらのことから,腰椎を取り巻く筋のモデルでは,腰椎周辺の各セグメント全てにマ クスウェルの筋モデルを配置する.この筋モデル配置により,腰痛は単独の動きをするの ではなく,その周りとの運動関係が生まれる. さらに,椎骨の間に存在する椎間板はクッションの代表的な表し方である,バネとダン パーを並列に並べたものにする. このようにして作成した腰椎モデルを図5.25 に示す. なお,胸部は一つの剛体とみなし筋モデルは考慮しない.頚椎モデルは腰椎モデル同様 の筋配置とする. これらを合わせた脊柱の筋・骨格モデルを図5.26 に示す.
次に腕,脚,骨盤付近の筋の付き方をみる.運動関係を見出すきっかけとなるので,各 筋についてそれぞれ見ることにする. そこで,各筋とそのモデル化について表5.3 にまとめた. ここで,表の見方を説明する.実物欄には実際の解剖図を載せる.A~K の分類方法は, 代表的な関節,又はセグメント(体節)間をつなぐ筋群としてまとめた.次にモデル欄には本 研究において考慮すべきものである場合にのみモデル化した図を載せる. 抵抗欄には,座位姿勢において人間が体を動かそうとしたとき,抵抗となりうるものに は○,抵抗成分とみなさない場合は☓をつける. アクチュエータとしてモデル化した場合,抵抗成分としては考えない. 最後の用途・特徴欄には筋の動き,そして筋の付着位置などを記す. 表5.3 A. 肩甲骨と上腕を結ぶ筋(15)
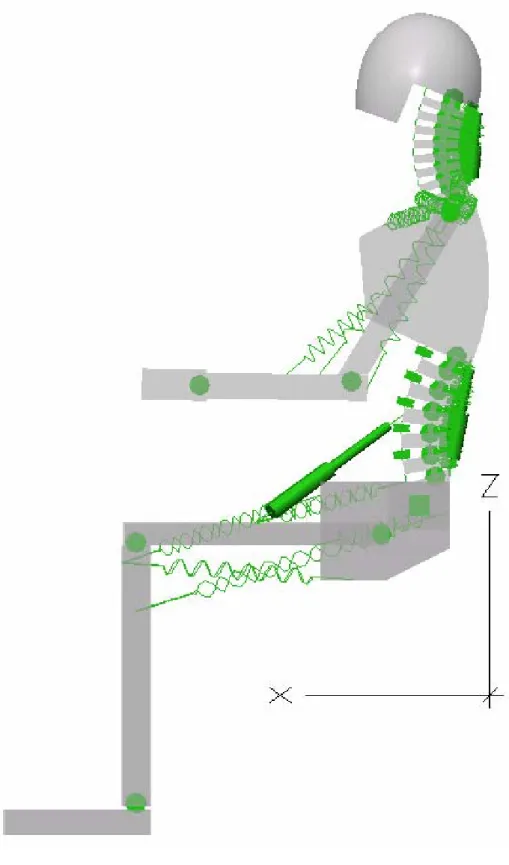
以上の表からどの筋をモデリングに考慮するか,そしてアクチュエータの働きをする筋 はどれかが決まった. この時点でアクチュエータの働きをする筋は大随骨から腰椎にかけて伸びる大腰筋(腰の 前に付く力)と背中(後ろに付く力)につく背筋の 2 つである.さらに人間モデルを作るにあ たって頭を前方に向けるためにアクチュエータを付ける.これで,3 つのアクチュエータを 使用することになる. このモデルで,座位における人体の挙動を表現出来る. この人体モデルの理想的動作を述べる. ・座位において姿勢が崩れる→骨盤が後方回転し,腰椎の湾曲が無くなる ・しかし,人間は姿勢が崩れたとしても前方を見るために頭の向きは変えない →頭のアクチュエータの働き ・姿勢が崩れ,痛みや疲れを感じると姿勢を直そうとする→大腰筋で腰椎を前方に引っ張 り湾曲を生み,背筋で骨盤を前方回転させ姿勢を理想の状態へと戻す 実際の人体においては様々な筋の制御によって地面に対して垂直に立つことが出来る. その制御は計り知れないものである.しかし,座位において腰痛を考慮するにはこの 3 つ の筋モデルの制御で大まかな人体制御が出来る. ここまでの筋モデルを含む全人体モデルを図5.27 に示す.
5.4 質量系 5.4.1 各モデルの質量定義 最後に考慮しなければならないもの,それは質量である.今回人体に備わる臓器などの 質量は骨格モデルの質量として定義することとする. ここで,日本人の平均体重を65kg とおいた.次に人体の各セグメントの全体重に対する 重量比を図5.29-a に示す.図中の数値は全体重に対するパーセンテージを示している.図 5.29-b.は身体各部の重心位置を示したものである. (a) 相対重量比 (b) 重心位置 図5.28 身体各部の相対重量と重心位置 この相対重量比より,各骨格モデルの質量を定義することが出来る.例えば,頭部モデ ルであるならば,日本人平均体重65kg に 7%を掛け,4.55kg と定義することが出来る. これより,図5.29-a から体重 65kg としたときの各部の重量を表 5.4 に示す. 表5.4 身体各部の重量
骨格名
相対重量比[
%]
重量[㎏]
頭部
7 4.55
上半身(頭部・腕を除く) 43 27.95
片腕
(上腕・前腕・手) 6.5(3.6・2.2・0.7) 4.225(2.34・1.43・0.455)
片脚
(大腿・下腿・足) 18.5(11.4・5.3・1.8) 12.025(7.41・3.455・1.17)
今回モデル化において最も重要な役割を成す骨盤の質量を決めなければならない.そこ で,図5.28-b の重心位置から,上半身モデルを胸部付近と腰部付近とに分ける
.
頭を含めた上半身重量は 65[kg]×(7+43)[%]=32.5[kg] (5.1) となる. 図5.28-b より上半身の重心位置は上部が 60,下部が 40 の割合の位置にある. そこで重心計算法から腰部付近の重量Mp を求めると (5.2) となる.同様に上半身(腕以外)の重量 MBを求めると (5.3) となる. これで,上半身の重量を腰部と上半身(腕以外)とに分けることが出来た. これらの値より,本研究で作成した各モデルの質量を定義する.ただし,腰部と上半身 との間にある腰椎モデルの質量は特に考慮しないものとする.頚椎モデルに関しても同様 である. 骨格モデルの質量定義を表5.5 に示す. 表5.5 各骨格モデルの質量定義骨格モデル
質量
[㎏]
頭部モデル
4.55
胸部モデル
8.45
片腕
(上腕・前腕・手)モデル 4.225(2.34・1.43・0.455)
骨盤モデル
19.5
片脚
(大腿・下腿・足)モデル 12.025(7.41・3.445・1.17)
5.4.2 質量についての考察 ここで,質量について考察すると,人間の重心は大まかに言ってヘソの辺りにあると言 われている.そこで表5.5 から,人体モデルを上半身(胸部以上),ヘソ周辺(骨盤周辺),下 半身(脚部)と 3 つに分けると,その重量は上から 21.45kg,19.5kg,24.05kg となることが 分かる.つまり,ヘソ周辺を中心に上下に均等に分かれているため人体の重心がヘソ辺り にあるという説も納得がいく.そして,体を前かがみにするとその重心は大きくずれ,バ ランスを崩しやすいことがよく分かる(図 5.29-a.b).
したがって,立体において,低い位置のものをとろうとして前かがみになった瞬間,重 心が急激に移動しそれに耐えるため,腰の筋肉に負担がかかり,さらにその状態で荷物を 持ち上げようとすれば,その加重も影響し,腰を痛める
と自体
原因になる(図 5.29-c). 重心がヘソの周辺のように高い位置にあるということは,人が立つということでも大変 バランスの悪いことである.実際立位は 2 本の脚だけで支えているため股関節を境に人体 を上下に分けると脚部重量が24.05kg に対してその上に上半身 41kg 近い重量が乗ることに なる.これだけ考えてもバランスの悪い構造といえる(図 5.30). よって,一度腰を痛めるなどして姿勢が悪くなると,全身バランスが崩れそれを支える ために余計な筋肉を使うこととなるので,腰痛を助長するだけでなく,思わぬ体の故障に つながる.(a) 人体中心モデル (b) 重心移動 (c) 腰痛 図5.29 体の重心変化 図5.30 人体の不安定さ
5.5 車椅子のモデリング 次に車椅子のモデリングを行っていく.姿勢の崩れや,検証するために,最も一般的な 簡易車椅子(図 5.31)と本研究で提案する脊柱湾曲に添った背もたれをした車椅子(図 5.32) を作成した.寸法は実際の車椅子を測定して得た.人体モデルを座らせたモデルを(図 5.33) に示す.
図
5.31 簡易車椅子モデル 図 5.32 本研究テーマの車椅子
図
5.33 人体モデルを座らせたモデル
6.考察
6.1 シミュレーション方法 今回 2 つの車椅子に座らせて人体モデルの姿勢変化をシミュレーションするため, MSC.visualNastran 4D を使用した. まずPro/ENGINEER を用いて作成した人体モデルを MSC.visualNastran 4D に移し, 質量は表5.5 のように決めた. 次に筋モデルのバネ・ダンパ係数を決めていく.シミュレーション結果から頚椎のバネ 係数は表6.1 に示すような値が妥当だと考える.腰椎のバネ係数は表 6.2 に示すような値が 妥当だと考える.その他,各椎骨を結ぶ筋(例えば C1‐C3,C1‐C4 等)のバネ係数は全て 0.001[N/m],ダンパ係数は全て 0.002[N・s/m]とした.アクチュエータは全て 1[N]とした. これらの値はシミュレーションを繰り返し行った上で決定した数値であり,実際の筋の 値とは異なる.これは,実際の人体がさまざまな要素から成り立っているために,それら をまとめてまずは単純な系としてモデル化した試みからである. モデルにかかる力は重力だけで外力は特に加えないものとする. 表6.1 頚椎のバネ係数設置個所
バネ係数
[N/m]
頭部‐
C1
0.01
C1‐C2
0.008
C2‐C3
0.008
C3‐C4
0.008
C4‐C5
0.008
C5‐C6
0.01
C6‐C7
0.01
C7‐胸部
0.012
表6.2 腰椎のバネ係数設置個所
バネ係数[N/m]
胸部‐
L1
0.02
L1‐L2
0.01
L2‐L3
0.008
L3‐L4
0.008
L4‐L5
0.01
L5‐骨盤
0.02
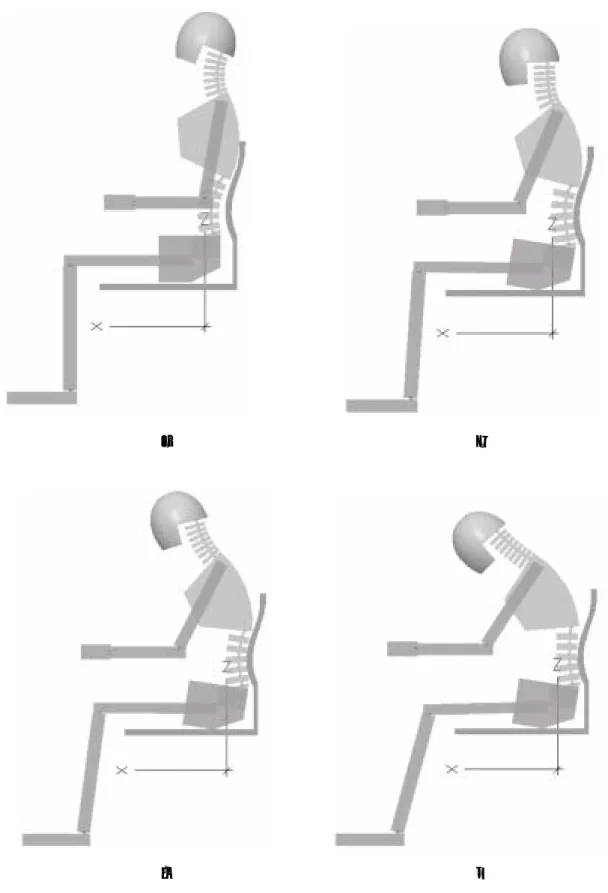
6.2 シミュレーション結果の検討 簡易車椅子に座ったときの挙動(図 6.1)と提案した車椅子に座ったときの挙動(図 6.2)を以 下に示す. ① ② ③ ④ 図6.1 モデルの挙動(簡易車椅子に座ったとき)
① ②
③ ④
図6.1,図 6.2 共通して,座位において骨盤後方回転を生じるとそれに伴い腰椎,頚椎の 湾曲が無くなる.さらに頭部の重量もあり,体は前方に崩れ,頭は下方を向いた状態にな る.まさに猫背状態である. 図6.1 と図 6.2 を比較して,図 6.1 よりも図 6.2 の方が姿勢が崩れるのが遅かったことか ら,提案した車椅子では腰痛が軽減されると考えられる.それは,背もたれが脊柱湾曲に 添っているため,広い面で体の重さを支えることが可能になり,圧力が分散され,姿勢の 崩れを軽減したからだと考えられる.
7.おわりに
本研究ではカイロプラクティックの考え方を参考に,背もたれに脊柱彎曲を持たせるこ とで,面で体の重さを支えることが可能になり,姿勢の崩れを軽減し,腰痛を防止できる と考え,背もたれが脊柱彎曲の形をした車椅子を提案し,その有効性を検討した. その際,人体を骨格系,筋系,質量系の 3 つに分けて詳細にモデル化した.そして,シ ミュレーションにより,一般の車椅子と脊柱湾曲に添った背もたれを持つ車椅子での比較 を行った.その結果,提案した車椅子の方が姿勢が崩れるのが遅く,提案した車椅子での 腰痛軽減の可能性を得た. 今後の展望として,筋系をモデル化したバネ・ダンパの値について検討を重ね,シミュ レーションの精度を上げたい.また,背もたれだけでなく座面にも注目してさらに腰痛を 防止できるようにしたい.謝辞
本研究を進めるにあたり,井上喜雄教授ならびに芝田京子講師には多大なご指導を賜り, 心から感謝の意を表したいと思います. また,共に悩み,励ましあい,有意義な学生生活を送らせてくれた研究室の方々に感謝 致します.特に,森崇君にはいろいろ協力してもらい大変感謝致します. 最後に,長い学生生活を影から支えて下さった両親,祖父母に心からのお礼と感謝の意 を表して,この論文を締めくらせて頂きたいと思います.参考文献
(1)「word’s Word」:コルベイユ,ジャン=クロード・アーシャンボウ,アリアン[著]・長崎 玄弥[総監修] 同朋舎出版 1997
(2) ACCESS international Corporation http:www.accessint.co.jp/
(3)「腰痛の予防と治し方」:中野 昇 南江堂 1980
(4)「痛みは体の SOS」:桑岡 敏文 西日本法規出版 2000
(5)「カイロプラクティック概論」:鈴木 正教 たにぐち書店 2001 (6)「図説 人体の構造と機能」:大島 新治 新思潮社
(7) JOINT 関節の構造と機能:CYNTHIA C.NORKIN・PAMELA K.LEBANGIE[著][監 訳]若松 武・[監訳・編集] 桑岡 敏文 西日本法規出版 2000
(8)「ESSENTIAL CLINICAL ANATOMY」:Keith L.Moore・Anne M.R.Agur, LIPPINCOTT WILLIAMS&WILKINS, 1995
(9) 「 Anatomy PALPATION&SURFACE MARKINGS 」 Third Edition : DEREK FIELD/BUTTERWORTH HEINEMANN/2001 (10)「人体解剖学」:木村 邦彦 大修館書店 1976 (11) 人体のなりたち」:坂井 建雄・佐藤 達夫 岩波書店 1998 (12)「日本 人体解剖学 第 1 巻」:金子 丑之助 南山堂 1966 (13)「目で見る 動きの解剖学」:ロルフ・ヴィルへード著・金子 公宥・松本 迪子訳 大修館書店 1996 (14)「バイオメカ二クスよりみた整形外科」:島津 晃・浅田 莞爾 金原出版株式会社 2000 (15) 村野次郎:腰痛防止姿勢制御装置付き車椅子の開発研究 成蹊大学大学院工学研究科 物理情報工学専攻修士論文 2002 (16)「設計のための人体寸法データ集」:生命工学工業技術研究所編 (17) 芝田京子,村野次郎,川口忠雄:腰痛防止姿勢制御装置付き車椅子の開発研究(第 1 報) −腰痛評価を考慮した人体等価モデルの構築−,精密工学会誌,Vol68,No11,1441 −1446
![図 5.13-2 骨盤の基準線 (12) 表 5.1 各基準船平均長 女性 男性 骨盤高 [㎜] 190.8±0.48 204.5±0.74 最大骨盤幅 [㎜] 255.3±0.77 259.9±0.82 外矢状径 [㎜] 170.8±0.63 166.4±0.61 恥骨下角度 [°] 81.2±2.5 [70~90] 58.6±1.9 [50~60] 真結合線径 [㎜] 115.6±0.60 103.9±0.61 入口横径 [㎜] 123](https://thumb-ap.123doks.com/thumbv2/123deta/6531054.667262/22.892.119.773.192.959/基準線準船平均女性男性骨盤㎜最大骨外矢状径㎜真結合㎜.webp)