1) 仙台大学体育学部
〒9891693 宮城県柴田郡柴田町船岡南 2218 2) 筑波大学体育系
〒3058574 茨城県つくば市天王台 111 連絡先 柴山一仁
1. Faculty of Sport Science, Sendai University
2218 Funaokaminami, Shibata, Miyagi 9891693 2. Faculty of Health and Sport Sciences, University of
Tsukuba
111 Tenno-dai, Tsukuba, Ibaraki 3058574 Corresponding author kz-shibayama@sendai-u.ac.jp
一流110 m ハードル走選手のハードリング動作に関する
バイオメカニクス的分析角運動量保存則からの検討
柴山 一仁1) 藤井 範久2) 阿江 通良2)
Kazuhito Shibayama1, Norihisa Fujii2and Michiyoshi Ae2: Analysis of angular momentum during hur-dling by world and Japanese elite sprint hurdlers. Japan J. Phys. Educ. Hlth. Sport Sci. 58: 135149, June, 2013
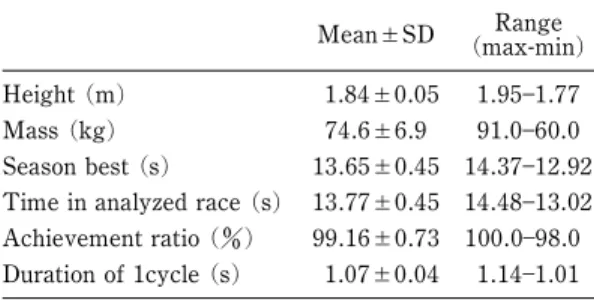
AbstractThe purpose of this study was to investigate the angular momentum characteristics of each limb during the airborne phase in sprint hurdlers. Twenty-nine world and Japanese top class 110-m hur-dlers (height: 1.84±0.05 m, weight: 74.6±6.9 kg, race time: 13.77±0.45 s) participated. Motions at the 7th hurdle during o‹cial competitions were videotaped using two high-speed VTR cameras at 200, 250, or 300 Hz. The positions of 25 body landmarks and calibration marks in the projected images were digi-tized. We then calculated three-dimensional coordinates using a DLT method. The angular momentum of each segment in the global coordinate system was calculated using the method of Dapena (1978). The amount of change in the angular momentum of body groups during each phase, and the duration of each phase, were calculated together with the coe‹cients of correlation between the calculated values and average running velocity. The results are summarized as follows: (1) In the support phase for the take-oŠ leg, faster hurdlers had a large whole-body angular momentum about the transverse and longitudinal axes. (2) In the ˆrst half of the airborne phase, faster hurdlers needed a large angular momentum for the lead-leg about the transverse axis in order to raise the leg, and therefore compensated for it with a large counter-direction of angular momentum for the trail-leg. (3) In the second half of the airborne phase in faster hurdlers, a shorter time was taken to swing the lead-leg, with corresponding adjustment by the head and trunk. However, if hurdlers overemphasized the downward motion of the lead-leg, excessive backward and right or left leaning of the trunk appeared to occur upon landing. Consequently, it is sug-gested that hurdlers need to change the downward motion of their lead-leg in accordance with their run-ning velocity.
Key wordsthree-dimensional motion analysis, compensation motion, downward motion of lead-leg キーワード3 次元動作分析,補償動作,リード脚の振り下ろし動作
.
緒
言
110 m ハードル走(以下「110 mH 走」と表記) は,9.14 m 間隔で10台設置された高さ1.067 m のハードルの踏切から着地までの局面であるハー ドリングと,着地から踏切までの局面であるイン タ ー バ ル 走 を 繰 り 返 す 競 技 で あ る ( 宮 下 , 1991).その競技特性から,パフォーマンス向上 のためにはインターバル走およびハードリングの 4 歩それぞれへの適応が必要であることが指摘さ れている(McDonald,2002). 2008年に行われた北京オリンピック,2009年 に行われたベルリン世界陸上競技選手権の両大会136
Table 1 Characteristics of the subjects Mean±SD (max-min)Range Height (m) 1.84±0.05 1.951.77 Mass (kg) 74.6±6.9 91.060.0 Season best (s) 13.65±0.45 14.3712.92 Time in analyzed race (s) 13.77±0.45 14.4813.02 Achievement ratio () 99.16±0.73 100.098.0 Duration of 1cycle (s) 1.07±0.04 1.141.01 136 柴山ほか では,準決勝で13.43 s までの記録を残した選手 が決勝に進出しており,試合条件などにより多少 の差はあるものの,近年の世界大会における決勝 進出記録は,13.40 s 前後であることが多いよう である(International Association of Athletics Federations, online).しかし,110 mH 走の日本 記録は2004年に谷川聡選手がマークした13.39 s であり,たとえ日本人選手が世界大会の準決勝で 日本記録と同程度の記録を出したとしても,決勝 に進むことが難しい状況にある.このような現状 から,世界一流選手と日本人選手の動作を比較 し,競技力向上への示唆を明らかにすることを目 的とした研究が散見され(森田ほか,1994大 橋ほか,2006谷川・柴山,2010),主として矢 状面の踏切動作の分析が行われている.しかし, 110 mH 走におけるハードリング動作は踏切脚の 側方への振り上げをともなう 3 次元的な動作で あり,矢状面に限定された分析では,ハードリン グ動作における技術的要因を定量化することは困 難であると考えられる.それにも関わらず,3 次 元的に動作分析を行っている研究は非常に少ない (McDonald and Dapena, 1991藤井ほか,1997). 走幅跳の空中動作やバレーボールのスパイク動 作など,身体が空中にある局面では,重力以外の 外力は作用しないことから全身の角運動量は保存 される(阿江・藤井,2002).この角運動量保存 則に基づくと,系全体の角運動量が保存された状 況で,ある身体部分で大きい角運動量を獲得する ためには,他の身体部分で逆向きの角運動量を大 きくする必要がある.ハードリング動作において も,踏切後に身体が空中に投射されることから, 角運動量保存則に基づいて空中における身体運動 を分析することによって,身体部分の相互作用 (後述する補償作用)について定量化することが で き る と 考 え ら れ る . McDonald and Dapena (1991) は,角運動量保存則を用いてハードリン グ 中 の 身 体 部 分 の 角 運 動 量 を 3 次 元 的 に 算 出 し,身体各部分の相互作用について検討してい る.しかし,疾走速度と身体部分の相互作用との 関係について検討した研究はみられない. 伊藤・富樫(1997)は,リード脚着地直前に おけるリード脚全体のスイング角速度は,疾走速 度の大きい選手ほど大きかったことを報告してい る.スプリント走に関する研究では,前後に開い た両脚を挟み込む動作,いわゆるシザース動作が 重要であると報告されており(阿江,2001), ハードリング動作の滞空期でリード脚を素早く振 り下ろすためには,逆脚である踏切脚の動作に着 目する必要があると推察される.しかし,ハード リング動作は前述のように踏切脚で 3 次元的な 動作を行っていることから,スプリント走とは異 なるメカニズムによってリード脚の振り下ろし動 作を行っていると考えられる.角運動量保存則に 基づくと,空中局面でリード脚全体のスイング角 速度を大きくする,すなわちリード脚の角運動量 を増加させるためには,他の身体部分において同 じ大きさで逆向きの角運動量を増加させる必要が ある.したがって,各身体部分の角運動量を 3 次元的に算出し,その相互作用と疾走速度との関 連について検討することにより,ハードル走の競 技力向上への示唆を明らかにすることができるだ ろう. そこで本研究では,一流110 mH 走選手のハー ドリング動作中における全身および身体各部分の 角運動量を算出し,身体各部の相互作用と疾走速 度との関係性を明らかにすることを目的とした.
.
方
法
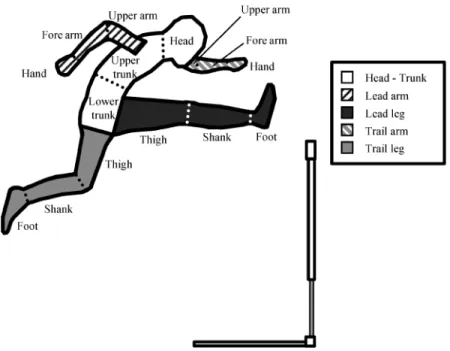
. 分析対象者 2007年から2008年に開催された公認競技会に おける110 mH レースに参加した男子選手29名をFig. 1 Grouping of whole body. 分析対象者とし,Table 1 にその特性を示した. 分析対象者には,世界記録保持者やオリンピック 優勝者などの世界一流選手,日本選手権大会優勝 者や日本学生選手権大会優勝者などの日本一流お よび学生一流選手を含んでいた.なお,シーズン ベスト記録(SB)に対する当該競技会における 記録(RT)の達成率(SB/RT×100)が98以 上のものを分析対象とした. . VTR 撮影 110 mH レース中の 7 台目ハードルの踏切脚の 接地からハードリング後のリード脚の離地までを 2 台の高速度 VTR カメラ(HSV500C3,NAC 社 製 , 撮 影 ス ピ ー ド 毎 秒 250 コ マ , 露 出 時 間 1/1000秒または Phantom V4.3, Nobby Tech 社 製,撮影スピード毎秒200コマ,露出時間1/600 秒~1/5000秒または Exilim EXF1, CASIO 社 製,撮影スピード毎秒300コマ,露出時間1/1000 秒)を用いて撮影を行った.なお,本研究で用い た VTR 画像の一部は,財日本陸上競技連盟科学 委員会によって撮影されたものである.同委員会 によって撮影されたレース以外の大会主催者に は,事前に文書および口頭で撮影内容についての 説明を行い,撮影の許可を得た. . データ処理 撮影した VTR 画像から選手の身体分析点25点 (左右の第三中手指節関節,手関節中心,肘関節 中心,肩峰,つま先,拇指球,踵骨隆起,足関節 中心,膝関節中心,股関節中心,肋骨下端および 頭頂,左右両耳珠点の中点,胸骨上縁)と,左右 方向(X 方向)5.0 m,進行方向(Y 方向)8 m, 鉛直方向(Z 方向)2.5 m の範囲に,X 方向では 1.25 m または2.5 m,Y 方向では 2 m,Z 方向で は0.5 m ごとに設置したコントロールポイント を,動作分析装置(FrameDIAS,DKH 社製) を 用 い 2 コ マ ご と に デ ジ タ イ ズ し た . 2 つ の VTR 画像の身体分析点とコントロールポイント の 2 次 元 座 標 か ら , DLT 法 ( Abdel-Aziz and Karara, 1971)により身体分析点の 3 次元実座標 を算出した.身体分析点の 3 次元座標値算出に おける標準誤差の最小値と最大値は,X 方向 0.006 0.014 m , Y 方 向 0.005 0.016 m , Z 方 向0.0050.014 m であった.
138
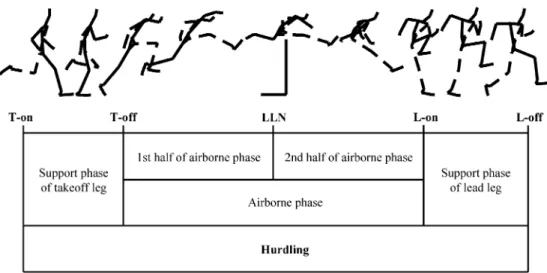
Fig. 2 Classiˆcation of the movements.
138 柴山ほか
得られた座標値は,バタワース型デジタルフィ ルタを用いて平滑化した.このときの遮断周波数 は,Wells and Winter (1980) の方法により身体 分析点の座標成分ごとに決定した(515 Hz). 身体を Fig. 1 に示すような15個の身体部分から 構 成 さ れ る 剛 体 リ ン ク モ デ ル と 仮 定 し , 阿 江 (1996)の身体部分慣性係数を用いて,平滑化し た身体分析点の座標データから身体部分および全 身の重心座標を算出し,時間微分することにより 重心速度を算出した. . 局面分け 7 台目ハードルの踏切脚の接地(T-on)から 7 台目ハードルのリード脚の離地(L-oŠ)までを 分析区間として,Fig. 2 に示すような動作時点と 局面を定義した.McDonald and Dapena (1991) にならい,リード脚の左右軸まわりの角運動量 (後述する transfer term と local term の和)が負 に切り替わった時点(LLN)を基準として,滞 空期を前半と後半に分けた. . 算出項目 疾走速度 分析区間における進行方向の身体重心水平速度 の平均値を疾走速度とした. 全身および身体各部分の角運動量 Dapena(1978)の方法に基づき,静止座標系 における身体部分の角運動量 Hiを以下の式によ り算出した.
Hi=ri/G×miVi/G+Iivi (1) ここで,ri/Gは身体重心に対する身体部分 i の重 心の相対位置ベクトル,miは身体部分 i の質量, Vi/Gは身体重心に対する身体部分 i の重心の相対 速度ベクトル,Iiは身体部分 i の慣性テンソル, viは身体部分 i の角速度ベクトルである.身体 部分の慣性テンソルの導出は湯(1995)の方法 に基づいて算出した.分析対象者の身体部分の慣 性特性は,阿江(1996)による慣性特性係数を 用いて推定した.なお,式(1)の右辺第 1 項は身 体重心まわりに身体部分 i の重心がもつ角運動量 (transfer term)であり,第 2 項は身体部分 i の 部分重心まわりの角運動量(local term)である. 全身の角運動量は,全ての身体部分のもつ角運 動量の総和とし,以下の式により算出した. HCG= 15
∑
i=1 Hi (2) さらに,全身の角運動量における身体部分の役割 を検討するために,Fig. 1 に示すように身体を 5 つの身体グループに分け,それぞれの身体グルー プに属する身体部分の角運動量の和を求めることにより,各身体グループの角運動量を算出した. なお,踏切脚が左脚の選手の値は反転し,踏切脚 を右脚に統一して分析を行った. ◯ 上 胴 , 下 胴 , 左 右 の 大 腿 , 下 腿 の local term の算出 各身体部分に設定した移動座標系における各軸 方向の単位ベクトルを時間微分することによって 角速度ベクトルを求めた(和達,1983).各身体 部分の慣性主軸と移動座標系の軸は一致すると仮 定し,身体部分の主慣性モーメントと角速度ベク トルを乗じることにより local term を算出し,静 止座標系に投影した. ◯ 頭部,左右の手および前腕,上腕,足部の local term の算出 これらの身体部分では直交移動座標系の設定が 困難であるため,湯(1995)の方法を用い,静 止座標系における local term を算出した.なお, これらの身体部分に関しては長軸まわりの回転を 考慮せず,身体部分は長軸まわりに対称であり, 長軸に直交する 2 軸の主慣性モーメントは等し いと仮定し,それらの慣性モーメントを平均して 使用した. 各局面の所要時間 撮影した VTR 画像から各歩の接地と離地の時 刻を読み取り,踏切脚支持時間,滞空時間,リー ド脚支持時間を算出し,滞空期では踏切脚離地か ら LLN までに要し た時間を滞空 期前半時間 , LLN からリード脚接地までに要した時間を滞空 期後半時間として算出した. . 用語の定義 滞空期では,ある身体グループにおける角運動 量の増加(または減少)に対して,必ず他の身体 グループにおける減少(または増加)が生じる. 本研究ではこれらの関係を「補償」と定義した. . 規格化および統計処理 身体グループおよび全身の角運動量は,Hin-richs(1987)の方法に基づいて被験者の身長の 二乗と身体質量で規格化した.したがって,結果 で示すグラフには,角運動量の単位を(s-1)で 示 し , 規 格 化 角 運 動 量 ( Normalized angular momentum)として表記する.分析局面の支持 時間,滞空時間の平均値をもとに,分析局面を 0 100に規格化し(踏切支持期021,滞空 期2283,リード脚支持期84100),統 計処理ソフト(PASW Statistics 18.0, SPSS Inc.) を用いて規格化時間 1 ごとに疾走速度を独立 変数,各身体グループの規格化角運動量を従属変 数とした単回帰分析を行った(有意水準 5 ). 後述する結果のグラフでは,有意な相関関係が認 められた時間にマークを表示した.グラフの上部 にマークがある場合は正の相関関係が,グラフの 下部にマークがある場合は負の相関関係が認めら れたことを示している.
.
結
果
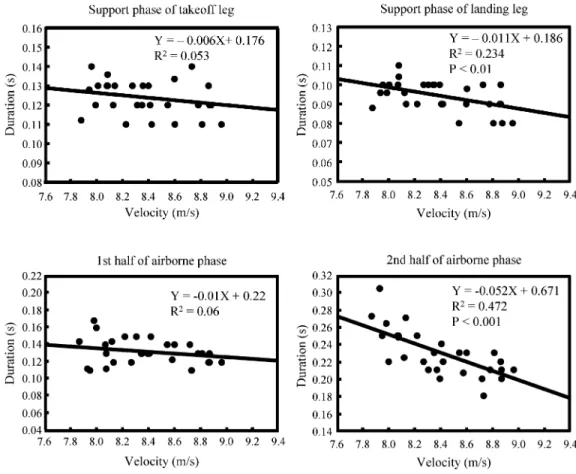
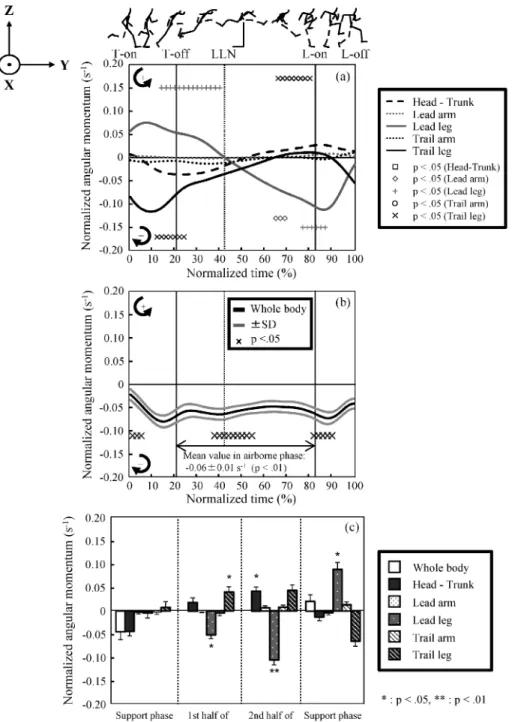
. 各局面の所要時間 Fig. 3 は,各局面に要した時間と疾走速度の関 係を示したものである.疾走速度が大きい選手ほ どリード脚支持期および滞空期後半における所要 時間が短かった(リード脚支持期 r=-.484, p <.01滞空期後半 r=-.687, p<.001).疾走速 度と踏切脚支持期,滞空期前半に要した時間には 有意な相関関係が認められなかった. . 各身体グループの角運動量 Fig. 46 は,踏切脚の接地からリード脚の離地 ま で の 全 身 ( Whole body ) と 頭 部 お よ び 体 幹 ( Head-Trunk ), リ ー ド 脚 と 同 側 の 腕 ( Lead arm),リード脚(Lead leg),踏切脚と同側の腕 (Trail arm),踏切脚(Trail leg)の各身体グルー プの X 軸(Fig. 4),Y 軸(Fig. 5)および Z 軸 (Fig. 6)まわりの規格化角運動量の変化(a, b) と各局面における変化量(c)を,分析対象者の 平均と標準偏差で示したものである.力学的には 滞空期における全身の角運動量は各軸まわりに保 存されるため,滞空期では一定値を示すはずであ る.しかし,本研究の結果に示すグラフでは,滞 空期における全身の規格化角運動量は一定値を示 していなかった(Fig. 46, b).これらの要因と140
Fig. 3 Relationship between average horizontal velocity and duration of each phase.
140 柴山ほか して,デジタイズや身体部分慣性係数の算出で少 しずつ生じた誤差により各身体部分における角運 動量の算出に誤差が生じていることや,約 8~9 m/s で疾走していることによって生じる空気抵 抗の影響が考えられるが,本研究が公認競技会を 分析対象としているため,本研究の限界と考えら れる.そこで滞空期では,平均値を用いて全身の 規格化角運動量と疾走速度との関係を検討するこ ととした(Fig. 46, b). なお,本研究で示した疾走速度と角運動量の関 係の妥当性について検討するため,滞空期で全身 の角運動量が保存されることに着目し,後述のよ うに滞空期の平均値に疾走速度との有意な相関が 認められた X・Y 軸まわりの全身の角運動量に 関して,各分析対象者の滞空期における全身の角 運動量を 1 コマ毎に算出し,それら全てのデー タと疾走速度との単回帰分析を行った.その結果, X 軸まわりでは疾走速度と全身の角運動量に有 意な負の相関がみられ(r=-.433, p<.0001), さらに Y 軸まわりでも疾走速度と全身の角運動 量に有 意な負の相関がみられた(r=-.450, p <.0001).従って,本研究で算出した角運動量に は誤差が含まれているものの,本研究で示した結 果には,疾走速度の変化がより影響していると考 えられる.これらの結果から,本研究で示してい る疾走速度と角運動量の関係は妥当であるといえ るだろう. 以降では,X, Y, Z 軸まわりにみられた特徴に ついて,それぞれ結果を示す. .. X 軸(左右軸)まわりの角運動量 Whole body が X 軸(左右軸)まわりに持つ規 格化角運動量は常に負の値を示し,踏切支持期 (04),リード脚支持期(8389)において 疾走速度の大きい選手ほど負の規格化角運動量が
Fig. 4 Changes in normalized angular momentum of each body group (a) whole body (b), and amount of change in normalized angular momentum during each phase (c) about X axis.
有意に大きかった.滞空期における平均値は,疾 走速度の大きい選手ほど負の規格化角運動量が有 意に大きかった(r=-.497, p<.01). Head-Trunk が左右軸まわりに持つ規格化角運 動量は,踏切支持期から滞空期前半では負の値 を,その後は正の値を示しており,値は小さいも のの,Trail arm も同様の傾向を示した.また, Lead arm が左右軸まわりに持つ規格化角運動量 は,分析区間を通してほぼ 0 であった.滞空期 後半における Head-Trunk の規格化角運動量の
142
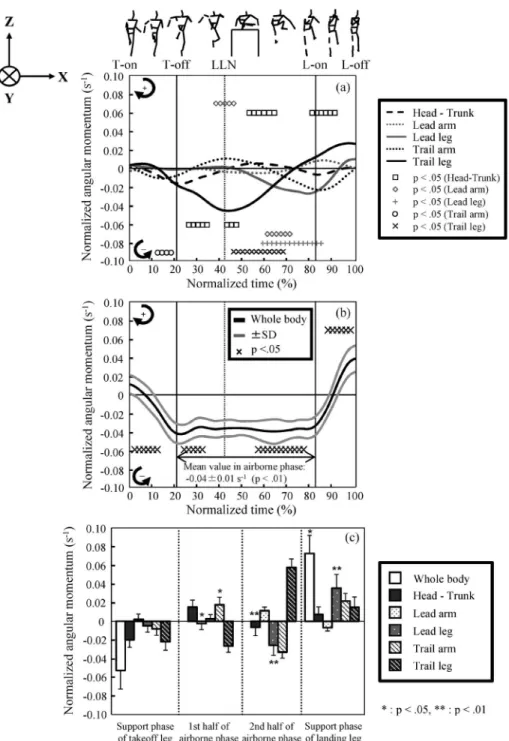
Fig. 5 Changes in normalized angular momentum of each body group (a) whole body (b), and amount of change in normalized angular momentum during each phase (c) about Y axis.
142 柴山ほか 変化量は,疾走速度が大きい選手ほど増加量が大 きかった(r=.368, p<.05). Lead leg が左右軸まわりに持つ規格化角運動 量は,踏切支持期から滞空期前半では正の値を示 し,その後は負の値を示していた.踏切支持期か ら滞空期前半にかけて(1440),疾走速度の 大きい選手ほど正の規格化角運動量が大きく, リード脚の接地前後において(7787),疾走
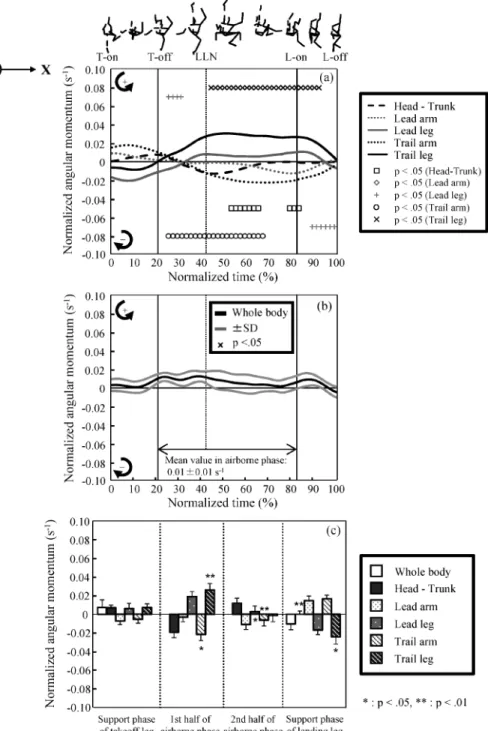
Fig. 6 Changes in normalized angular momentum of each body group (a) whole body (b), and amount of change in normalized angular momentum during each phase (c) about Z axis.
速度の大きい選手ほど負の規格化角運動量が大き かった.滞空期における Lead leg の規格化角運 動量の変化量は,前半,後半ともに疾走速度が大 き い 選 手 ほ ど 減 少 量 が 大 き か っ た ( 前 半 r = -.457, p<.05後半 r=-.482, p<.01).リー ド脚支持期における Lead leg の規格化角運動量 の変化量は,疾走速度が大きい選手ほど増加量が 大きかった(r=.371, p<.05).
144 144 柴山ほか Trail leg が左右軸まわりに持つ規格化角運動 量は,踏切支持期から滞空期後半までは負の値 を,その後はわずかに正の値を示し,リード脚支 持期では再び負の値を示した.踏切離地の前後に おいて(1224),疾走速度の大きい選手ほど 負の規格化角運動量が大きく,滞空期後半におい て(6679),疾走速度の大きい選手ほど正の 規格化角運動量が大きかった.滞空期前半におけ る Trail leg の規格化角運動量の変化量は,疾走 速度が大きい選手ほど増加量が大きかった(r =.409, p<.05). .. Y 軸(進行方向軸)まわりの角運動量 Whole body が Y 軸(進行方向軸)まわりに持 つ規格化角運動量は,ほとんどの局面で負の値を 示し,踏切支持期において(212),疾走速度 の大きい選手ほど負の規格化角運動量が有意に大 きく,リード脚支持期において(88100),疾 走速度の大きい選手ほど正の規格化角運動量が有 意に大きかった.滞空期における平均値は,疾走 速度の大きい選手ほど負の規格化角運動量が有意 に大きかった(r=-.471, p<.01).リード脚支 持期における Whole body の規格化角運動量の変 化量は,疾走速度の大きい選手ほど増加量が大き かった(r=.438, p<.05). Head-Trunk が進行方向軸まわりに持つ規格化 角運動量は,踏切支持期から滞空期前半では負の 値を,その後はわずかに正の値を示し,滞空期の 後半からリード脚支持期では再び負の値を示して いた.滞空期では(2635,4348),疾走速 度の大きい選手ほど Head-Trunk の持つ規格化 角運動量が有意に小さく,滞空期の後半からリー ド脚支持期にかけて(5364,8192),疾走 速度の大きい選手ほど規格化角運動量が大きかっ た.滞空期後半における Head-Trunk の規格化 角運動量の変化量は,疾走速度の大きい選手ほど 減少量が小さかった(r=.511, p<.01). Lead arm が進行方向軸まわりに持つ規格化角 運動量は,踏切支持期から滞空期前半ではほぼ 0 を示し,リード脚の接地前後にわずかに正の値を 示した.滞空期前半における Lead arm の規格化 角運動量の変化量は,疾走速度の大きい選手ほど 減少量が小さかった(r=.394, p<.05). Lead leg が進行方向軸まわりに持つ規格化角 運動量は,踏切支持期から滞空期前半ではほぼ 0 を示していたが,滞空期後半では負の値を示し, リード脚支持期の後半に正の値を示した.負の値 を示した局面では(5986),疾走速度の大き い選手ほど負の規格化角運動量が有意に大きかっ た.滞空期後半における Lead leg の規格化角運 動量の変化量は,疾走速度が大きいほど減少量が 大きく(r=-.576, p<.01),リード脚支持期で は疾走速度が大きいほど増加量が大きかった(r =.554, p<.01). Trail arm が進行方向軸まわりに持つ規格化角 運動量は,踏切支持期では負の値を,滞空期前半 では正の値を示し,滞空期の後半からリード脚支 持期では再び負の値を示していた.滞空期前半に おける Trail arm の規格化角運動量の変化量は, 疾走速度の大きい選手ほど増加量が大きかった (r=.389, p<.05). Trail leg が進行方向軸まわりに持つ規格化角 運動量は,踏切支持期から滞空期後半まで負の値 を示し,リード脚支持期では再び正の値を示して いた.滞空期の後半において(4669),疾走 速度の大きい選手ほど負の規格化角運動量が大き かった. .. Z 軸(鉛直軸)まわりの角運動量 Whole body が Z 軸(鉛直軸)まわりに持つ規 格化角運動量は,分析区間を通してわずかに正の 値を示していた. Head-Trunk が鉛直軸まわりに持つ規格化角運 動量は,踏切支持期でわずかに正の値を示し,滞 空期で負の値を示した.負の値を示した局面では (5365),疾走速度の大きい選手ほど負の規格 化角運動量が有意に大きかった.リード脚支持期 における Head-Trunk の規格化角運動量の変化 量は,疾走速度の大きい選手ほど増加量が大きか った(r=.489, p<.01). Lead arm が鉛直軸まわりに持つ規格化角運動 量は,踏切支持期ではわずかに正の値を示し,滞 空期後半からリード脚支持期ではわずかに負の値 を示した.
Lead leg が鉛直軸まわりに持つ規格化角運動 量は,踏切支持期から滞空期前半で負の値を示 し,それ以降は正の値を示した.リード脚支持期 において(89100),疾走速度が大きい選手ほ ど規格化角運動量が小さかった.滞空期後半にお ける Lead leg の規格化角運動量の変化量は,疾 走速度の大きい選手ほど増加量が小さかった(r =-.399, p<.05). Trail arm が鉛直軸まわりに持つ規格化角運動 量は,踏切支持期から滞空期前半では正の値を, その後は負の値を示した.負の値を示した局面に おいて(2567),疾走速度の大きい選手ほど 負の規格化角運動量が有意に大きかった.滞空期 前半における Trail arm の規格化角運動量の変化 量は,疾走速度の大きい選手ほど減少量が大きく (r=-.403, p<.05),滞空期後半では,疾走速度 の大きい選手ほど減少量が小さかった(r=.490, p<.01). Trail leg が鉛直軸まわりに持つ規格化角運動 量は,踏切支持期でわずかに負の値を示し,滞空 期からリード脚支持期では正の値を示していた. 滞空期からリード脚支持期にかけて(4493), 疾走速度の大きい選手ほど正の規格化角運動量が 大きかった.滞空期前半における Trail leg の規 格化角運動量の変化量は,疾走速度の大きい選手 ほど増加量が大きく(r=.478, p<.01),リード 脚支持期では,疾走速度の大きい選手ほど減少量 が大きかった(r=-.466, p<.05).
.
考
察
. 角運動量からみたハードリング動作 本 研 究 で 算 出 し た 角 運 動 量 は , ほ と ん ど が Transfer term によるものであり,Local term に よる影響は小さかった.例として踏切脚における 大腿の総角運動量に対する Transfer term の割合 を示すと,分析対象者の平均は X 軸まわり92.8 ,Y 軸まわり83.2,Z 軸まわり73.5であ り,同様に足部では X 軸まわり99.4,Y 軸ま わり98.1,Z 軸まわり99.8であった.したが って,部分重心と身体重心の位置関係により多少 の差はあるものの,ハードリング動作は,主とし て身体重心まわりに身体各グループが回転するこ とで行われていると考えられる.このとき,程度 の差はあるものの Local term も各身体部分の回 転運動に関係していると考えられるが,本研究の 目的を超えるため,詳細な検討については今後の 課題としたい.以降では,結果で示した角運動量 の変化と,Fig. 46 で示した各平面のスティック ピクチャーから分析対象者の動作特徴について記 述し,疾走速度との関係について考察する.ま た,本研究では角運動量を身長の二乗と身体質量 で規格化し,体格差による影響を取り除いている が,疾走速度が大きい選手ほど滞空期後半におけ る所要時間が短く(Fig. 3),ハードリング滞空 時間は疾走速度と脚長の両方に影響を受けること を合わせて考えると(柴山ほか,2011),滞空期 における動作のタイミングには,疾走速度と脚長 の両方が影響していると考えられる.したがっ て,以下の考察ではそれらの影響を統合し,疾走 速度の大きい選手の特徴として記述する. .. 踏切脚支持期 踏切脚支持期では頭部および体幹(以下体幹と 表記)の左右軸および進行方向軸まわりには負の 規格化角運動量,鉛直軸まわりには正の規格化角 運動量がみられた(Fig. 46).前述のように, 角運動量の大半が Transfer term であったことを 踏まえると,これは体幹の前傾(主に X,Z 軸) および左屈(主に Y,Z 軸)に該当する角運動量 であり,スティックピクチャーからも同様の動作 を行っていたことがうかがえる.同様に,踏切脚 と同側の腕(以後「踏切腕」と表記)では拳上動 作が行われており(Fig. 4, 5),リード脚では股 関節の屈曲(Fig. 4, 6),踏切脚では股関節の伸 展(Fig. 4, 6)および外転動作(Fig. 5)が行わ れていた.また,支持期に全身の左右軸および進 行方向軸まわりの規格化角運動量が増加してお り,左右軸まわりでは主に体幹によって(Fig. 4),進行方向軸まわりでは主に踏切脚と体幹に よって増加していた(Fig. 5).これらの増加量 に疾走速度との有意な相関がみられなかったこと に加え,踏切支持期における左右軸および進行方146 146 柴山ほか 向軸まわりの全身の規格化角運動量と,滞空期に おける全身の規格化角運動量の平均値は,それぞ れ疾走速度の大きい選手ほど大きかったことから (Fig. 4, 5),疾走速度の大きい選手は,踏切脚の 接地時には既に大きい角運動量を持っており,大 きな角運動量を保ったまま離地していたといえる. .. 滞空期 方法に示したように,本研究では左右軸まわり におけるリード脚の角運動量が負に切り替わった 時点(LLN)を基準として,滞空期の前後半を 分けている.LLN は,リード脚の進行方向軸ま わりの負の角運動量が増加し始める時点とほぼ一 致しているとともに,体幹では鉛直軸まわりに負 のピーク値を,踏切腕では進行方向軸まわりに正 のピーク値を示す時点とほぼ一致しており,同時 に踏切脚では進行方向軸まわりにおける負のピー ク値と,鉛直軸まわりの正のピーク値を示す時点 とほぼ一致していた(Fig. 46).つまり,LLN は,リード脚では振り上げから振り下ろし動作に 切り替わる時点であるとともに,体幹では前傾位 での右屈動作,踏切腕では振り上げ動作,踏切脚 では外転および屈曲動作が最も顕著に行われてい た時点であった.以下の考察では,これらの動作 の関連性について詳細に検討していく. 角運動量はベクトル量であるため,空中局面に おける全身の角運動量は,各軸まわりにそれぞれ 保存される.そこで,滞空期については身体各グ ループの規格化角運動量の変化量に主に着目し, 滞空期前半と後半それぞれについて考察を進める. ... 滞空期前半 滞空期前半における左右軸まわりの規格化角運 動量の変化量は,リード脚における規格化角運動 量の減少に対して,踏切脚および体幹で補償して おり(Fig. 4),これらの角運動量は主にリード 脚では股関節の屈曲動作,踏切脚では股関節の屈 曲および外転動作,体幹では前傾動作にそれぞれ 該当する.同様に進行方向軸まわりでは,踏切脚 における規格化角運動量の減少(外転動作)に対 して,体幹(右屈動作)および踏切腕(振り下ろ し動作)で補償していた(Fig. 5).鉛直軸まわ りでは,踏切脚(屈曲,外転)およびリード脚 (屈曲)における規格化角運動量の増加に対して, 体幹(前傾,右屈)および踏切腕(振り下ろし) で補償していた.これらのことから,滞空期前半 では,ハードルクリアランスのためにリード脚の 振り上げ動作と踏切脚股関節の屈曲および外転動 作が必要であり,主として踏切腕と体幹で脚と逆 向きの動作をすることにより補償していたものと 考えられる. 疾走速度の大きい選手ほど,左右軸まわりでは リード脚の規格化角運動量の減少量が大きく,踏 切脚の増加量が大きかった(Fig. 4).さらに, 滞空期前半局面に要した時間と疾走速度には有意 な 相 関 は み ら れ な か っ た ( Fig. 3 ). 柴 山 ほ か (2011)は,踏切脚の離地前後において,疾走速 度が大きい選手ほどリード脚大腿の振り上げが小 さかったこと,すなわちリード脚がより後方に位 置していたことを報告している.したがって,疾 走速度の大きい選手が素早くリード脚を振り上げ るためには大きい角運動量が必要であり,踏切脚 で逆向きの角運動量を大きくすることによって (Fig. 4),リード脚で大きい角運動量を獲得して いたものと考えられる. ... 滞空期後半 滞空期後半における左右軸まわりの規格化角運 動量は,リード脚における規格化角運動量の減少 (股関節の伸展動作)に対して,踏切脚(屈曲お よび外転動作)および体幹(後傾動作)で補償し ていた(Fig. 4).同様に進行方向軸まわりでは, 踏切脚における規格化角運動量の増加(外転動作) に対して,リード脚(内転動作)および踏切腕 (拳上)で補償していた(Fig. 5).鉛直軸まわり では,顕著な規格化角運動量の増加,減少はみら れなかった(Fig. 6).これらのことから,滞空 期後半では,ハードルクリアランスのために踏切 脚の屈曲および外転動作が行われると同時に, リード脚を接地するためにリード脚の伸展および 内転動作が生じ,それらの補償動作として,体幹 と踏切腕の動作が行われていたと考えられる. 疾走速度の大きい選手ほど,左右軸および進行 方向軸まわりにおける規格化角運動量はリード脚 の減少量が大きく,体幹の増加量が大きかったこ
とに加え(Fig. 4, 5),疾走速度が大きい選手ほ ど滞空期後半局面に要した時間が短かった(Fig. 3).滞空期前半に要した時間には差がみられな かったことから,ハードリングにおける滞空時間 の長短にはハードリング後半局面における時間が 影響しており,短い時間でリード脚を振り下ろす ためには,体幹における補償動作が必要であった こ と を 示 し て い る . McDonald and Dapena (1991 ) は, 踏切脚 を踏切 後に後 方に 残すこ と で,踏切脚で大きい負の角運動量を獲得し,リー ド脚に転移する角運動量を大きくすることがで き,リード脚を素早く振り下ろすことができると 述べている.しかし,本研究の結果から,踏切脚 を踏切前後に後方に残すこと,つまり踏切脚で左 右軸まわりに大きい角運動量を獲得することは, むしろリード脚の振り上げ動作に必要であり,伊 藤・富樫(1997)が報告しているリード脚の素 早い振り下ろし動作,つまり左右軸および進行方 向軸まわりにおける大きい角運動量は,滞空期後 半に体幹で補償することによって獲得することが できると考えられる.さらに,疾走速度が大きい 選手ほど踏切支持期における左右軸および進行方 向軸まわりにおける全身の規格化角運動量の絶対 値が大きかったことは(Fig. 4, 5),リード脚の 素早い振り下ろし動作に貢献していたと考えられ る. 滞空期後半における進行方向軸および鉛直軸ま わりの規格化角運動量に関して,主に体幹や踏切 脚においてみられた有意な相関関係は(Fig. 5, 6),滞空期後半局面の時間が疾走速度によって 異なることにより,動作のタイミングにずれが生 じていたと考えられる. .. リード脚支持期 リード脚支持期では,主な動作として体幹の後 傾(Fig. 4),踏切腕の水平外転(Fig. 5, 6),リー ド脚股関節の伸展および内転(Fig. 46),踏切 脚股関節の伸展(Fig. 46)が行われていた.支 持期中に全身の進行方向軸まわりの規格化角運動 量が顕著に増加しており,主に踏切腕,リード脚 と踏切脚によって増加していた(Fig. 5).左右 軸まわりでは,全身の規格化角運動量の増加はわ ずかであったものの,リード脚と踏切脚で逆向き の大きい増加量(リード脚)と減少量(踏切脚) がみられた(Fig. 4).このとき,疾走速度の大 きい選手ほど進行方向軸まわりの全身およびリー ド脚の規格化角運動量の増加量が大きく,リード 脚支持期の所要時間が短かった(Fig. 3).リー ド脚離地時における全身の進行方向軸まわりの規 格化角運動量は,疾走速度の大きい選手ほど大き かったことから(Fig. 5, b),疾走速度の大きい 選手は,滞空期から行われていたリード脚の内転 方向への回転を短い時間で止め,それによって全 身を踏切脚側に素早く回転させていたと考えられ る. 藤井ほか(1997)は,リード脚の接地直後に は股関節で屈曲および外転トルクによる負のトル クパワーを発揮することを報告している.リード 脚の進行方向軸まわりの規格化角運動量の変化量 にみられた傾向には,これらのトルク発揮パター ンが影響していると考えられるが,本研究の範囲 を超えるため今後の課題とする. . 疾走速度とハードリング動作の関係 以上の考察から,疾走速度の大きさがハードリ ング動作に及ぼす影響について概括する.疾走速 度の大きい選手は,踏切脚支持期で大きい全身の 角運動量を持っており,それを滞空期でリード脚 の振り下ろし動作に利用するとともに,体幹で リード脚とは逆向きの角運動量を短い時間で大き く増加させることで,リード脚を素早く振り下ろ していた. 以上のことから,疾走速度の大きい選手のよう に短い所要時間でハードリング動作を行うために は,リード脚を素早く振り下ろすことが重要であ り,それには特に滞空期後半における体幹の前後 傾および左右屈による補償動作を行う必要がある だろう.しかし,体幹の動作を強調しすぎること は,リード脚の接地期における体幹の過剰な後傾 や右屈(リード脚とは逆方向への側屈)を生じる ため,疾走速度の大きさに応じたリード脚の振り 下ろし動作を行う必要があると考えられる.ま た,踏切脚支持期までの局面で大きい全身の角運
148 148 柴山ほか 動量を獲得するためのキネティクス的要因につい ても,今後検討していく必要があると考えられる.
.
ま
と
め
本研究の目的は,一流110 mH 走選手のハード リング動作中における全身および身体各部分の角 運動量を算出し,疾走速度との関係性を明らかに することであった.得られた結果をまとめると, 以下のようになる. ◯ 踏切支持期において,疾走速度の大きい選 手ほど左右軸および進行方向軸まわりにおけ る大きい全身の角運動量を持っており,それ らを保ったまま離地していた. ◯ 滞空期前半では,疾走速度の大きい選手ほ どリード脚の振り上げに伴う角運動量の減少 が大きく,踏切脚でそれを補償していた. ◯ 滞空期後半では,疾走速度の大きい選手ほ ど所要時間が短く,その中で素早くリード脚 を振り下ろすためには,体幹における補償動 作が必要であった. ◯ 疾走速度の大きい選手は,滞空期から行わ れていたリード脚の内転方向への回転を短い 時間で止め,それによってリード脚支持期に 全身を踏切脚側に素早く回転させていた. 以上のことから,疾走速度の大きい選手のよう に短い所要時間でハードリング動作を行うために は,リード脚を素早く振り下ろすことが重要であ り,それには特に滞空期後半における体幹の前後 傾および左右屈による補償動作を行う必要がある だろう. 文 献Abdel-Aziz, Y.I. and Karara, H.M. (1971) Direct linear transformation from comparator coordinates into ob-ject space coordinates in close-range photogrammet-ry. Proceedings of the symposium on close-range pho-togrammetry, American Society of Photogrammetry: Falls Church, pp. 118.
阿江通良(1996)日本人幼少年およびアスリートの身 体部分慣性特性.Japanese Journal of Sports Science, 15(3): 155162. 阿江通良(2001)スプリントに関するバイオメカニク ス的研究から得られるいくつかの示唆.スプリント 研究,11: 1526. 阿江通良・藤井範久(2002)スポーツバイオメカニク ス20講.朝倉書店東京,pp. 8388.
Dapena, J. (1978) Method to determine the angular momentum of a human body about three orthogonal axes passing through its center of gravity. Journal of Biomechanics, 11(5): 251256.
藤井範久・宮下 憲・阿江通良(1997)ハードル走に おけ る下 肢 3 次元 関節ト ルク および 関節 トルク パ ワー.バイオメカニクス研究,1(1): 4150. Hinrichs, R.N. (1987) Upper extremity function in
run-ning. II: Angular momentum considerations. Interna-tional Journal of Sport Biomechanics, 3: 242263. International Association of Athletics Federations.
Competition web sites. http://www.iaaf.org/history/ index.html, (accessed, 20120511).
伊藤 章・富樫 勝(1997)ハードル走のバイオメカ ニクス的研究スプリント走との比較.体育学研究, 42(4): 246260.
McDonald, C. (2002) Hurdling is not sprinting. Track Coach, 161: 51375143.
McDonald, C. and Dapena, J. (1991) Angular momen-tum in the men's 110-m and women's 100-m hurdles races. Medicine & Science in Sports & Exercise, 23 (12): 13921402. 宮下 憲(1991)最新陸上競技入門シリーズ 4ハー ドル.ベースボールマガジン社東京,pp. 962. 森田正利・伊藤 章・沼澤秀雄・小木曽一之・安井年 文(1994)スプリントハードル(110 mH・100 mH) および男女400 mH のレース分析.佐々木秀幸ほか 監修 日本陸上競技連盟強化本部バイオメカニクス 研究班編 世界一流陸上競技者の技術.ベースボー ルマガジン社東京,pp. 6687. 大橋祐二・横澤俊治・門野洋介・藤井範久・阿江通良 (2006)男子一流110 m ハードル選手の踏切および踏 切準備動作に関するバイオメカニクス的分析.陸上 競技研究紀要,2: 9599. 柴山一仁・藤井範久・阿江通良(2011)一流110 m ハー ドル走選手の 1 サイクル動作に関するキネマティク ス的研究疾走速度および脚長と動作の関連から. 体育学研究,56(1): 7588. 湯 海鵬(1995)3 次元的身体角運動量の算出法.体 育学研究,40(3): 161169. 谷川 聡・柴山一仁(2010)2007年世界陸上競技選手 権大阪大会における男子110 m ハードル走および女
子100 m ハードル走レースの動作分析.日本陸上競 技連盟バイオメカニクス研究班編 世界一流陸上競 技者のパフォーマンスと技術,第11回世界陸上競技 選手権大阪大会,日本陸上競技連盟バイオメカニク ス研究班報告書.日本陸上競技連盟東京,pp. 86 95. 和達三樹(1983)物理のための数学.岩波書店東京, p. 110.
Wells, R.P. and Winter, D.A. (1980) Assessment of signal noise in the kinematics of normal, pathological and sporting gaits. Human locomotion, 1: 3641.