Gray - scale Hough変換を用いたコンクリート表面のひび割れ検出
8
0
0
全文
(2) Hough 変換をグレースケール画像に拡張した Gray-scale Hough 変換(GSHT)を適用し,ひび割 れを局所的に直線近似する. GSHT を用いることにより,従来はひび割れの. vote. vote. 輝度値に注目して画像処理を行っていたのに対 し,ひび割れの局所的な直線性と方向性(GSHT で検出された直線の投票値と方向)を特徴量とし て付加することが可能になる.GSHT はノイズを多 く含む画像に対しても,ロバストにひび割れを検. θ. θ. ρ. π /2. −π / 2. (a) ρ − θ パラメータ空間 (a) ρ − θ parameter space.. γ. (b) γ − θ パラメータ空間 (b) γ − θ parameter space.. 図 1 パラメータ空間の比較(M=10) Fig.1 Comparison of parameter space(M=10).. 出することができるばかりでなく,処理の簡略化も 図れる.. δ (θ ). y. digital image. 2. Gray-scale Hough 変換 Gray-scale Hough 変換(GSHT)は,2 値画像に行 う Hough 変換[3][9]をグレースケール画像に拡張 した Hough 変換である.Lo and Tsai[4]は 4 次元の. digital lines. ρ. パラメータ空間で GSHT を行っている.Kesidis[5]. θ. は,パラメータ空間は通常の Hough 変換と変わら. 0. ないが,複数の閾値で制限されたテーブルを用. x 図 2 デジタル直線の間隔 Fig.2 Distance of digital line.. 意することによって GSHT を実現している.しかし, 両方の手法とも同じ輝度値で構成される直線を検 出することを想定しているため,ひび割れのような. き,式(1)を満たすような c( ρi , θ j ) の投票数を 1 増. 輝度値が滑らかに変化している場合に適用させる. 加させるものである.ここで, c( ρi , θ j ) はセルと呼. には不向きな手法である.. ばれるパラメータ空間上の 2 次元領域である.. 本報告における GSHT は投票値を工夫すること. 全画素を黒画素とみなして ρ − θ パラメータ空. により,次元数を拡大することなく,テーブルを用. 間に投票を行った結果を図 1(a)に示す.ここで,. 意せずに直線を検出する.投票値には,. 画像サイズは(2M+1)×(2M+1)[pixel](M=10)とし,. ① 輝度値. 画像中心を中心座標とする.今回は ρ 方向の標. ② 輝度値と平均輝度値の差分. 本化幅 ∆ρ は 1.0, θ 方向の標本化幅 ∆θ は式(2). ③ ②を標準偏差で除算した値. とした.. ∆θ = arctan(1/ M ), ⎫ ⎬ (−π / 2 ≤ θ < π / 2). ⎭. の 3 つの手法を検討した.. (2). この場合,図 1(a)のように θ = π / 4 毎にピーク. 2.1 量子化誤差. ρ − θ パラメータ空間で行う 2 値画像の Hough. が生じる.これは画像がデジタルデータであること. 変換の直線式は,デジタル画像の座標値(x,y)を. に起因する.隣り合うデジタル直線の間隔は θ に. 用いると式(1)で表される.. 依存し, θ 毎に間隔は異なる.図 2 に示すように,. ρ = x cos θ + y sin θ .. この間隔を δ (θ ) とすると, δ (θ ) は式(3)から算出. (1). できる. Hough 変換の基本的な投票方法は,入力画像 内の黒画素の座標値(x,y)を式(1)に代入したと. −58− -2-. δ (θ ) = max( cos θ , sin θ ).. (3).
(3) 式(3)を用いて, ρ を δ (θ ) で規格化して,新し いパラメータ γ (θ ) を式(4)のように定める.. γ (θ ) =. x cos θ + y sin θ . δ (θ ). 3. ひび割れの方向性 コンクリート表面を撮影したデジタル画像内に 存在するひび割れは,局所的に見ると 1 本の直線. (4). で近似できる.従って,画像全体のひび割れは直. 式(4) を用いて,図 1(b) に図 1(a) と同条件で. 線を接続したものと考えることができる(図 3).そこ. Hough 変換を行った結果を示す.図 1(b)では,投. で,画像を格子状の小領域に分割し,小領域毎に. 票値のピーク値は線分の角度のところになる. GSHT で直線を検出し,ひび割れ値を算出する.. [6][7].. また,ある領域 A で検出された直線を延長した方. こ の よ う に , γ − θ パ ラ メ ー タ 空間を 用い て. 向の隣接領域 B,C には,その直線と接続するよう. Hough 変換を行うと投票空間のひずみが緩和でき. な直線がひび割れとして存在する可能性が高い.. る.この手法は GSHT においても効果的なパラメ. デジタル画像を小領域に分割することを考える 際には,小領域のサイズが重要になる.文献[1]の. ータ空間である.. ひび割れ自動計測システムを用いて,ある建造物 2.2 Gray-scale Hough 変換の原理. のコンクリート表面を撮影した 3040×2008[pixel]. ひび割れはひび割れ方向に滑らかに輝度変化. のデジタル画像 1 枚に存在するひび割れ 1 本の. するため,輝度値を投票する GSHT が有効である. 長さ[pixel]のヒストグラムを図 4 に示す.また,図 5. と考えられる.そこで,GSHT における投票値とし. に示すように,連続するひび割れの角度差 α は,. て,以下のような 3 種を検討した.. 図 6 に示すような分布になった.ここで,ひび割れ. ①. S = ∑s. ②. S = ∑( s − ave). の分岐点は,幾何学的な分岐と輝度変化で評価 している.. ③ S = ∑( s − ave) / σ ここで,S は投票値,s は輝度値,ave は領域の 2. local domains. 平均輝度値, σ 2 は領域内の分散である. 以上の投票値を用いて GSHT を行うことを考え. B. る.この投票値 GSHT の直線式は式(4)を用い,. A. γ − θ パラメータ空間で投票を行う.まず,画素. C. ( xi , y j ) を用いるとは式(5)となる. x cos θ + y j sin θ γ (θ ) = i . δ (θ ). straight lines. 図 3 局所領域内のひび割れ Fig.3 Crack of local domain.. (5). 式(5)により描かれた軌跡の通るパラメータ空間. 40. のセル c(γ k , θl ) にsi,jを投票する.セル内に蓄積さ. 35. れた投票値が最大となるセル c(γ max , θ max ) を求め,. 30. count value. 式(6)を用いて直線を検出する. x cos θ max + y sin θ max γ max (θ max ) = . (6) δ (θ max ). 25 20 15. 本報告では, c(γ max , θ max ) に蓄積された S を. 10. 「ひび割れ値」と呼ぶ.①,②,③の各投票値によ. 5. るひび割れ値の比較は 4 章で行う.. 0 01. 10. 20. 30. 40. 50. 60. 70. 80. length pixel. 図 4 ひび割れ長さのヒストグラム Fig.4 Histogram of crack length.. −59− -3-. 90. 100 110.
(4) ここで,領域 A,B の θ max を各θ A , θ B とする. 式(7)で算出された α を図 5 に示すヒストグラム を参照し, θ に対する重み付け量 wθ を決定する.. αn. GSHT はひび割れを近似して直線を検出する ため,領域間の接続点が不連続になるが,通常, ひび割れは必ず繋がっているため,領域間の接. α0. 続点は連結している.接続点のずれ,すなわち γ. crack segment. 方向のずれは一定範囲での一様分布で与えられ るものとした.. γ 方向のずれを考慮にするには,まず,領域A. 図 5 連続するひび割れの角度差. Fig.5 Angle difference of continuous cracks.. の直線lAと領域Bの境界との接続点p(xs,ys)を算出 する.次に,すでに領域BにおいてGSHTで検出. 40. した直線 lB (γ B , θ B ) をp(xs,ys)に平行移動させ,式. 35. (8)を用いて平行移動後の直線 lB ′ (γ B ′ , θ B ) を算出. count value. 30. する.. 25 20. γ B′ =. 15 10. xs cos θ B + ys sin θ B . δ (θ B ). (8). 式(8)で求めた γ B′ と領域 B の元の γ B のずれに. 5. よる重み wγ は,一様分布から式(9)を用いて決定. 0 -60 -50 -40 -30 -20 -10. α. 0. 10. 20. 30. 40. 50. 60. する.今回はブレの程度を 10δ (θ B ) とした.. deg. 図 6 角度差のヒストグラム Fig.6 Histogram of angle difference.. wγ = 1, (| γ B′ − γ B |≤ 10δ (θ B )), ⎫⎪ ⎬ wγ = 0, (| γ B′ − γ B |> 10δ (θ B )).⎪⎭. 図 4 から,ひび割れ 1 本の長さは 20[pixel]まで が多く,平均長さは 20.447[pixel]となった.これに より,小領域のサイズは GSHT では奇数がよいた. 式(7)と式(9)から領域Bへの重み付け量WtBは, 領域Aのひび割れ値WAを用いて式(10)とした. WtB = Wθ × Wγ × WA × 0.5.. め,今後用いる窓サイズは 21×21[pixel]とした. 次に,図 6 から連続するひび割れの角度差の 関係が分かる.図 6 の縦軸の頻度を正規化し,隣. (9). (10). 式(10)の 0.5 は経験値である.ここで,式(10)が 非 0 である場合に,領域 A にも重み付けを行う.. 接する領域間の角度差による重み付けパラメータ. wθ を決定する.. B. 次に,重み付けの手順について述べる.まず,. continuation line. detection line using GSHT. 21×21[pixel]の小領域に画像全体を分割する. A. 分割後に各領域で GSHT を行い,ひび割れ値と 検出された直線の γ , θ を抽出する.各領域のひ び割れ値が最大の領域から処理を実行する.ここ. C 21. で,図 3 を参考にして領域 A,B を考える.領域 A,. B の角度差 α は GSHT によるパラメータ θ を用い 21. ると式(7)から算出できる.. α = θ A − θB .. interposition domains. weighting domains of θ. 図 7 方向性による重み付け Fig.7 Weighting by directivity.. (7). −60− -4-.
(5) 領域 A の直線が隣接領域と干渉する数は複数 である.干渉する領域数を N として,領域 A への 重み付け量 WtA は式(11)から算出する.また, Wθ (a) original 1. と Wγ は式(10)と同様の値を用いる. WtA = (Wθ × Wγ × WB × 0.5) / N .. (b) shading 1. (c) original 2 (d) shading 2. 図 8 テスト画像 Fig.8 Test image.. (11). 以上の手順を図 7 にまとめて示す.. 4. 実験 4.1 GSHT の投票値の比較. 2 章で述べた GSHT における 3 つの投票値の. vote. vote. θ. 比較を行う.. θ. (a) original 1 ①. γ. (b) original 1 ②. γ. (1) 投票値①と②の比較 投票値の比較を行う際に,テスト画像として図 8 の 4 つを用いる.画像サイズは 21×21[pixel]とし, それぞれ原画像とシェーディング補正画像の組 み合わせである.シェーディング補正とは,画像. vote. vote. θ. θ. (c) shading 1 ①. γ. (d) shading 1 ②. γ. に生じる光ムラやシミ等を除去するために背景を 補正したものである.ここでは文献[1]に提案され ている Wavelet 変換等を用いて光ムラやシミ等を 除去し,シェーディング補正を行うシステムを用い てシェーディング補正画像を作成した.. vote. vote. θ. θ. (e) original 2 ①. γ. (f) original 2 ②. γ. GSHT の γ − θ パラメータ空間の形状で投票値 の評価を行う.図 8 に対して①と②の投票値を用 いて GSHT を行ったときのパラメータ空間の形状 vote. を図 9 に示す.. vote. θ. 図 9(e) から,投票値①の場合には原画像で. GSHT を行うとピーク値の形状が判断できない.一 方,投票値②の場合には原画像とシェーディング. γ. θ. (g) shading 2 ①. γ. (h) shading 2 ②. 図 9 投票値の違いによるパラメータ空間の形状 Fig.9 Parameter space form by voting difference.. 補正画像の形状はほぼ同じである.従って,投票 値②を用いると画像の状態に左右されずにピーク 値を検出することが可能である.. (2) 投票値②と③の比較 投票値②と③を比較する際のテスト画像を図 10 に示す.投票値②と③は領域の平均輝度値との 差分を用いているため,(1)より,シェーディング補 正を行っていない原画像をテスト画像とした. 図 10 に投票値②と③で GSHT を行い算出した 領域毎のひび割れ値の分布を図 11 に示す.. 図 10 テスト画像 Fig.10 Test image.. −61− -5-.
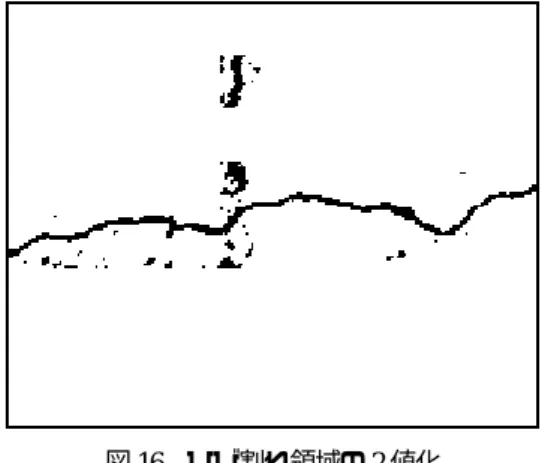
(6) 0−15. 15−30. 30−45. 0−15 75−90. 45−60. (a) vote ②. same area. 0−15. 15−30. 15−30 105−120. 30−45 120−135. 45−60 135−150. 60−75. 図 12 重み付け後の領域毎のひび割れ値 Fig.12 Crack value of every domains after weighting.. 30−45. 45−60. (b) vote ③ 図 11 領域毎のひび割れ値 Fig.11 Crack value in each domain.. 図 13 ひび割れ領域の検出 Fig.13 Crack domain detection.. 投票値③を用いると,各領域の標準偏差で除. 向性の重み付けを行う.図 12 に重み付け後のひ. 算を行うため,ひび割れ領域と背景の差が小さく. び割れ値の分布を示し,図 13 にひび割れ値に閾. なっている.ひび割れ検出には背景との差が大き. 値を設け,ひび割れ領域と背景を分別した結果を. い方がよい.また,背景にひび割れ領域と同程度. 示す.. な 30~45 のひび割れ値を持つ部分が生じてしまっ. また,図 14 に GSHT を用いて検出した直線を示. た(図 11(b)の黒円部分参照).従って,投票値には. す.図 15 に図 13 を図 10 に重ねたものを示す.. ②の領域平均輝度値との差分が望ましいことが分. 図 12 から,ひび割れ方向の重み付けにより図. かった.. 11(a)よりもひび割れ値 45∼60 の領域が拡大して いることが確認できる.また,図 13,図 14,図 15 か. 4.2 ひび割れ検出実験. ら,ひび割れの幾何学的特徴を考慮することによ. 4.1 節で GSHT における投票値を選定すること. って,ひび割れ領域を検出することが可能である. ができた.そこで,2 章と 3 章の理論に基づいてひ. ことが分かる.しかし,直線的なノイズを誤検出す. び割れ領域を検出する実験を行った.さらに,ひ. る部分も存在した.これは,局所領域サイズの変. び割れ領域の検出後に 2 値化処理を施しひび割. 更や隣接領域を考慮することによって,除去でき. れを検出した.. ると考えている.. まず,図 10 を入力画像として GSHT を行い,方. −62− -6-. 図 13 で検出した領域に 2 値化処理を施したものを.
(7) 図 14 直線検出. Fig.14 Line detection.. 図 16 ひび割れ領域の 2 値化 Fig.16 Binarization of crack domains.. 図 15 ひび割れ領域の重ね合わせ(gray domain) Fig.15 Crack domain superposition.. 図 17 従来手法の結果 Fig.17 Result of existing algorithm.. 図 16 に示す.比較のため,図 10 にシェーディン. 有効性を示せた.. グ補正を行った後に 2 値化処理する従来手法の. 得られた結論は以下のとおりである.. 結果を図 17 に示す.ここで,2 値化処理の閾値は,. (1) GSHT の投票値に領域の平均輝度値との. 2 値化後のひび割れが途切れない最適な値に設. 差分を用いることにより,シェーディング補. 定した.. 正を行わずに,原画像にそのまま適用させ. 図 16,図 17 を比較すると図 17 は原画像にそ のまま 2 値化処理を行ったため,光ムラや壁の. ることが可能になる.. (2) ひび割れの方向性を考慮し,実データに. 汚れ等の原因によりノイズが非常に多い. 一方,. 基づいた領域間の直線の変化角度によっ. 図 16 はひび割れ領域のみ 2 値化処理を行ってい. て,ひび割れ値の重み付けを行うことによ. るためノイズを押さえることができた.. り,ひび割れ領域の検出精度が向上する.. (3) ひび割れ領域の検出後に単純な 2 値化処. 5. 結言. 理を施すだけで,ひび割れを検出すること. 本報告では,コンクリート表面を撮影したデジタ. が可能になる.. ル画像に,ひび割れの局所的な直線性と方向性. 今後の課題として,現状は原画像を小領域に分. を考慮し,Gray-scale Hough 変換を行うことによっ. 割して GSHT を行い,ひび割れ領域を検出してい. てひび割れを検出する手法を提案した.実際の. るが,領域ではなく,そのままのひび割れを検出. ひび割れ画像で実験を行うことによって本手法の. する手法を検討する必要がある.また,ひび割れ. −63− -7-.
(8) を直線近似せずに,別の幾何学的手法も検討し たいと考えている. 謝辞: 本研究の一部は,文部科学省 21 世紀 COE プログ ラム(研究拠点形成費補助金)「超高齢化社会における人と ロボット技術の共生」の研究助成により行われました.厚く 御礼申し上げます.. 参考文献 [1] 伊藤厚史,橋本周司,コンクリート表面の高精細画像計 測,第 66 回情報処理学会全国大会公演論文集,. pp.565-566,2004 [2] 河村圭,宮本文穂,中村秀明,佐藤亮,対話型遺伝的 アルゴリズムによるデジタル画像からのひび割れ抽出, 土木学会論文集,No.742/VI-60,pp.115-131,2003. [3] P.V.C.Hough , Method and means for recognizing complex pattern,U.S.Patent No.3069654,1962 [4] R.Lo,W.Tsai,Gray-scale Hough transform for thick line detection in gray-scale images,Pattern Recognition,28, pp.647-661,1996 [5] A.L.Kesidis,N.Papamarkos,On the gray-scale inverse Hough transform,Image and Vision Computing,18, pp.607-618,2000 [6] 和田俊和,藤井高広,松山隆司, γ − ω ハフ変換-可変 標本化による ρ − θ パラメータ空間のひずみ除去と投 票軌跡の直線化,電子情報通信学会論文誌,D-Ⅱ,. Vol.J75-D-Ⅱ,No.1,pp.21-30,1992 [7] 森本正志,尺長健,末永康仁,量子化を考慮した Hough 変換,電子情報通信学会技術研究報告, PRU89,pp.1-8,1989 [8] A.Ito , Y.Aoki , and S.Hashimoto , Accurate Extraction and Measurement of Fine Cracks from Concrete Block Surface Image,Proc.of IECON2002,2002 [9] 松山隆司,輿水大和,Hough 変換とパターンマッチン グ,情報処理,30,9,1989. −64− - 8 -E.
(9)
図



関連したドキュメント
In this paper, we propose the column-parallel LoS detection architecture for the integrated image sensor, which has a capability to track the saccade, as well as its implementation
ture process, and the area measurement can be per- formed with the gray scale pixel values. We can treat the directional dependency caused by pixel placement independently of
When Misdetection radius was large, the ID length long, or the number of devices large, the Pair method was the best since it could reduces sequential blinking by adding bits
As a research tool for the ATE, various scales have been used in the past; they are, for example, the 96-item version of the Tuckman-Lorge Scale 2) , the semantic differential
6 HUMAN DETECTION BY TILTED SENSORS FROM CEILING Based on previous studies, this paper presents an approach to detect human 2D position, body orientation and motion by using
The paper is devoted to proving the existence of a compact random attractor for the random dynamical system generated by stochastic three-component reversible Gray-Scott system
In order to describe higher transformations between maps of Gray -categories we construct an internal Gray -category in GrayCat Q 1 as a substructure of the iterated path
One can easily generate the ordered subset of (V ∗ , <) consisting of all strings of length up to n as follows: start with (∅, 1, 0); given the list of strings of length up to n −
