Title
マニピュレータモデルにおける最小動力学パラメータと逆
動力学計算法( 本文(Fulltext) )
Author(s)
川崎, 晴久; 神崎, 一男
Citation
[日本ロボット学会誌] vol.[11] no.[1] p.[100]-[110]
Issue Date
1993-01
Rights
The Robotics Society of Japan (日本ロボット学会)
Version
出版社版 (publisher version) postprint
URL
http://hdl.handle.net/20.500.12099/24270
学術論文
マニ ピュ レ ー タ モ デ ル に お け る
最 小 動 力 学 パ ラ メ ー タ と逆 動 力 学 計 算 法
川
崎
晴
久*神
崎
一
男*
Minimum
Set of Dynamics
Parameters
of Manipulator
Models
and
Algorithm
for Efficient
Computation
of Inverse
Dynamics
Haruhisa
KAWASAKI
Kazuo
KANZAKI
This article presents a method to determine the minimum set of dynamics parameters of manipula tors. It is based on a new concept 'Ąi (i-th joint torque)-identifiablity' to classify the dynamics para meters. The method permits the determination of all the minimum dynamics parameters which can be used directly to the Newton-Euler Formulations. It also presents an algorithm for efficient com
putation of inverse dynamics of manipulators using the minimum set. The computational efficiency of the Algorithm is compared with other published methods.
Key Words : Manipulator, Robot, Dynamic model ; Identification ; Modeling
1.ま え が き マ ニ ピ ュ レー タの高 精 度 ・高 速 な運 動 には,そ の動 力 学 モ デ ル を ベ ース と した運 動 制 御 法 が大 き な効 果 を発 揮 して い る.n自 由度 の マ ニ ピ ュ レー タ の動 力 学 モ デ ル に は,マ ニ ピ ュ レー タ を構 成 す る リ ン クの質 量,質 量 中 心 位 置,お よび慣 性 テ ン ソル の 総 計10n個 の動 力 学 パ ラ メー タ を必 要 とす る.こ れ ら の パ ラ メ ー タは 関 節 トル ク に は線 形 に寄 与 し,こ の性 質 を 用 い て,い くつ か の パ ラ メー タ 同定 法 が 提 案 され てい る1∼3).しか しな が ら,10n の パ ラ メー タは 動 力 学 モ デル に と って 冗 長 な た め,パ ラ メ ー タ同 定 に よ りパ ラ メ ー タを 一 意 に 決 定 す る こ とが で きな い.こ のた め,動 力 学 モ デ ル の 計 算 に 必要 な 最 小 限 のパ ラ メ ー タ に 整 理 し定 式 化 す る こ とが 求 め られ て い る.こ れ を 最 小 動 力 学 パ ラ メー タ と呼 ぶ こ とにす る.最 小 動 力 学 パ ラ メー タの 決定 は,パ ラ メー タ同定 の プ ロセ ス が ロバ ス トに な りパ ラ メー タ の真 値 の推 定 を可 能 とす るの み な らず,動 力学 モ デ ル の簡 素 化 や モ デ ル計 算 の効 率 化,モ デ ル ベ ー ス の適 応 制 御4)の実 現 な どに貢 献 す る. Khosla5)やKhalil6)ら は数 値 解 析 に よ り最 小 動 力 学 パ ラ メー タ を求 め る方 法 を示 してい るが,数 値 解 法 は ロボ ッ トの最 小 動 力 学 パ ラ メ ー タを 定 式 化 で きな い た め パ ラ メー タの 意 味 を 理 解 す る こ とは 困 難 であ り,動 力 学 計 算 や 制 御 計 算 の効 率 化 に 寄 与 しな い. Gautierら7),Khali1ら8)は 一 般 的 な シ リアル リン グ 構 造 マ ニ ピュ レー タを 対 象 に ラ グ ラ ン ジ ュ法 に基 づ い た 最 小 動 力 学 パ テ メ ー タの 定 式化 を 示 して い るが,解 明 さ れ て い な い 部 分 が 残 され て お り,パ ラ メー タ数 を減 ら し て い るが 最 小 に は至 って い な い.Mayedaら は,ラ グ ラ ン ジ ュ運 動 方 程 式 を 基 礎 に 関節 軸 が平 行 か直 交 す る 回転 形 マ ニ ピ ュ レー タに 限定 した とき の最 小 動 力 学 パ ラ メー タを定 式化9)し,そ の後 一 般的 な マ ニ ピ ュ レー タを 対 象 に最 小 動 力学 パ ラ メー タ を定 式 化10)した.こ の方 法 は, 完全 に 陽 の形 で最 小 パ ラ メー タ(ベ ー ス パ ラメ ー タ と定 義)を 示 して い る が,逆 動 力学 計 算 の効 率 の よ い ニ ュー トン ・オ イ ラー法11,14)のパ ラ メー タ と して直 接 適 用 で き ず,逆 動 力学 計 算 の効 果 は 明確 で な い.ま た,逐 次 推 定 法12)に よ るパ ラ メー タ 同定 の観 点 か らす る と,ど の 関 節 を駆 動 す る と どの パ ラ メー タが 可 同定 か が 明 らか に され て い な い た め,パ ラ メー タ 同定 に適 した 運 動 を 考 察 す る 原 稿 受 付1992年3月23日 *金 沢 工 業 大 学 機 械 シ ス テ ム工 学 科
マ ニ ピ ュ レ ー タモ デ ル に お け る最 小 動 力 学 パ ラ メ ー タ と逆 動 力 学 計 算 法 101 の に見 通 しが よ い とは いえ な い. 本 論 文 は,剛 体 シ リア ル リ ン ク機 構 と して モ デ ル化 さ れ るn自 由度 マ ニ ピ ュ レー タを 対 象 に,ニ ュ ー トン ・オ イ ラ法 を基 礎 と した動 力 学 パ ラ メ ー タ の最 小 化 の理 論 を 示 す.動 力学 パ ラ メー タ の最 小 化 を図 るた め に関 節 トル ク τi可 同定 の新 しい概 念 を導 入 し,最 小 パ ラ メー タ は 漸化 式 で あ らわ して い る.こ の結 果,逐 次 推 定 法 に よ り 先 端 リン クか ら順 に パ ラ メー タ 同定 す る場 合 の駆 動 す べ き関 節 が 明 らか に な り,パ ラ メー タ 同定 に適 した運 動 を 考 察 す るの に 見通 しが よ くな る.ま た,本 方 法 で求 め ら れ る最 小 動 力学 パ ラ メー タは,直 接 的 に ニ ュー トン ・オ イ ラ ー法 に よ る逆 動 力 学 計 算 に 適 用 で き る特 徴 が あ る. 最 後 に,求 め た 最 小 動 力 学 パ ラ メ ー タの適 用 と計 算 ア ル ゴ リズ ムの 改 良 に よ る一 般 的 シ リアル構 造 の マ ニ ピ ュ レ ー タを 対 象 と した 逆 動 力 学 計 算 法 を示 す.本 計 算法 は 従 来 の方 法 と比 較 し最 も計 算 効 率 が よい もの で あ る. 2.マ ニ ピ ュ レー タ の 動 的 モ デ ル 2.1リ ンク座 標 系 の 設定 マ ニ ピ ュ レー タ に は,Fig.1に 示 す よ うに各 リ ン クに 固定 した座 標 系 を設 定 す る.基 底 部 か ら手 先 に 向 け て リ ン ク番 号 を0,1,…,n,リ ン クiー1と リ ン クiと の関 節 iに修 正 したDnavit-Hartenbergの 記法13)に よる リン ク座 標 系 Σiを リン クiに 固定 して設 定 す る.θi,αi,ai, diはFig.1に 示 す 関 係 を表 す パ ラ メー タ で あ り,i-1Ri を Σi-1か ら Σiへ の 回 転 に 関 す る変 換 行 列 とす る と 〓(1) であ る.こ こで,SとCは そ れ ぞ れsin関 数 とcos関 数 を 表 し,(i-1Ri)-1=(i-1Ri)T=iRi-1の 関 係 が あ る.ま た,Σi-1表 示 の Σi-1原 点 か ら Σi原 点 へ のベ ク トル
Fig. 1 Link coordinate frames and link parameters i-1 Piは 〓(2) で 表 さ れ る. 2.2ニ ュ ー トン ・オ イ ラ ー 法
関 節1の 変 数qiは,関 節iが 回 転 関 節 の と き 角 度θi で あ り直 動 関 節 の と き は 変 位diで あ る か ら qi =ρiθi+(1-ρi)di(3) で 表 さ れ る.こ こ で
ρi={1(関節iが回転関節(以下Rと略記)のとき)(関節iが直転関節(以下Tと略記)のとき)
(4) で あ る.n自 由 度 マ ニ ピ ュ レ ー タ の ニ ュ ー ト ン ・オ イ ラ ー 法 に よ る 逆 動 力 学 は 次 の 式(5)∼(11)に よ り求 め ら れ る14).式(5)∼(8)は 順 方 向 の 繰 り返 し計 算 式 で あ り,式(9)∼(11)は 逆 方 向 の 繰 り返 し計 算 式 で あ る. ωi=iRi-1ωi-1+ρizoqi(5) 〓(6) 〓(7) 〓(8) 〓(9) 〓(10) τi={zoTni(関節iがRのとき)zoTni(関節iがTのとき)(11) こ こ で,miは リ ン クiの 質 量 ,siは Σiで 表 し た リ ン クiの 質 量 中 心 へ の 位 置 ベ ク トル,Iiは Σiで 表 し た リ ン クiの 質 量 中 心 ま わ りの 慣 性 テ ン ソ ル,ωiは Σiの 角 速 度 ベ ク トル,画 は Σiの 角 加 速 度 ベ ク トル,νiは Σi の 並 進 加 速 度 ベ ク トル,νiは リ ン クiの 質 量 中 心 の 並 進 加 速 度 ベ ク トル,∫iは リ ン クi-1か ら リ ン クiに 作 用 す る カ ベ ク トル,勘 は リ ン クi-1か ら リ ン クiに 作 用 す る モ ー メ ン トベ ク トル,τiは 関 節iの トル ク1力 で あ る.ベ ク トル の 左 肩 の 添 字kは そ の ベ ク トル が 座 標 系k で 表 現 さ れ て い る こ と を 意 味 し,左 肩 と 右 下 の 添 字 が 等 し い と き は 左 肩 の 添 字 を 省 略 し て い る.す な わ ちiαi=ai で あ る. 初 期 条 件 は ω0=ω0=0,ν0=90で あ る.こ こ で,90は, 重 力 加 速 度 ベ ク トル で あ る.以 下 で は,外 力 は 作 用 し て い な い と し ∫n+1=nn+1=0と す る. 座 標 系iの 原 点 で の リ ン ク2の 慣 性 テ ン ソ ル をIiと す る と,平 行 軸 の 定 理 よ り Ii=Ii+mi(SiTSiE3-sisiT)(12) を 得 る.た だ し,E3は3×3単 位 行 列 で あ る.こ のIiと 日本 ロボ ッ ト学 会 誌11巻1号 101 1993年1月川 崎 晴 久 神 崎 一 男 viを 用 い る と fi=mivi+ωi×misi+ωi×(ωi×misi)fi=mivi+ωi +misi+ωi×(ωi×misi)+iRi+1Fi+1(13) ni=Iiωi+ωi×(Iiωi)+misi×νini=Iiωi+ωi× (Iiωi)+misi×νi+iRi+1(Pi+1×fi+ni+1)(14) と 記 述 し直 す こ と が で き る.以 下 で は,式 の 簡 素 化 を 図 る た め 式(13),(14)を 次 式 で 表 す こ と に す る. fi=Fi[mi,misi,fi+1](15) ni=Ni[Ii,misi,fi+1,ni+1](16)
上 式 は,fiの 計 算 に リ ン クi に 関 し て はmiと 物siの パ ラ メ ー タ が,πiの 計 算 に は ろIiとmisiの パ ラ メ ー タ が 必 要 で あ る こ と を 示 し て い る.こ のmi,misi,Iiが リ ン ク1の オ リジ ナ ル な 動 力 学 パ ラ メ ー タ で あ る.な お, 以 下 で は,幾 何 学 パ ラ メ ー タ は 既 知 とす る. 3.パ ラ メ ー タ 数 の 最 小 化 の 考 え 方 ニ ュ ー ト ン ・オ イ ラ 法 に よ り運 動 方 程 式 を 展 開 し て 求 め る と,動 力 学 パ ラ メ ー タ は 運 動 方 程 式 の 中 で は 結 合 し た パ ラ メ ー タ と し て 現 れ る.運 動 の 観 測 値(関 節 角 度
qi,関 節 速 度qiZ,関 節 加 速 度qiと 関 節 トル ク τiの 観 測 値 か ら パ ラ メ ー タ 同 定 を 行 う と こ の 結 合 し た パ ラ メ ー タ の み 同 定 が 可 能 で あ り,同 定 が 不 能 な 動 力 学 パ ラ メ ー タ が 存 在 す る.こ の こ と は,リ ン ク の 動 力 学 パ ラ メ ー タ が 動 力 学 モ デ ル か ら み て 冗 長 で あ る こ と を 意 味 す る.こ こ で は,冗 長 で な い 最 小 と な る パ ラ メ ー タ の 編 成 を 考 察 す る.以 下 で は,動 力 学 パ ラ メ ー タ を 単 に パ ラ メ ー タ と 呼 ぶ こ と に す る.は じ め に,パ ラ メ ー タ 同 定 め 可 否 に つ い て 次 の 定 義 を お こ な う. 定 義1:qj,qj,qj(1≦j≦n)と τk(i≦k≦n)の 観 測 値 か ら 同 定 が 可 能 な パ ラ メ ー タ を τi可 同 定 パ ラ メ ー タ と よ び,同 定 が 可 能 な こ とを τi可 同 定 と い う. 定 義2:qj,qj:qj(1≦j≦n)とzk(i≦k≦n)の 観 測 値 か ら 同 定 が 可 能 で な い パ ラ メ ー タ を τi非 可 同 定 パ ラ メ ー タ と よ び,同 定 が 可 能 で な い こ と を τi非 可 同 定 と い う. こ の 定 義 か ら,τi可 同 定 パ ラ メー タ(以 下,τi-IP と略 称 す る)は τj-IP(j<i)で あ る と い え る.ま た, τi非 可 同 定 パ ラ メ ー タ(以 下,τi-UIPと 略 記 す る) は,τiに 影 響 しな い パ ラ メ ー タ(以 下 こ れ を タ イ プ1の τi-UIPと 呼 ぶ)と 影 響 す る パ ラ メ ー タ(こ れ を タ イ プ
IIの τi-UIPと 呼 ぶ)に 分 け ら れ る.こ の タ イ プIIの τI-UIPは,パ ラ メ ー タ の 編 成 に よ りzZ-IPと タ イ プ 1のzZ-UIPに 分 離 で き る.さ ら に,τiに は リ ン ク1 か ら リ ン クi-1の パ ラ メ ー タ は 何 ら 影 響 しな い.こ の こ と か ら,パ ラ メ ー タ 数 の 最 小 化 は 次 の 考 え 方 で 実 行 で き る. 1)リ ン クnの パ ラ メ ー タ か ら,τn-IPと タ イ プ1の τn-UIPを 抽 出 し,タ イ プIIの τi-UIPを 消 去 す
る. 2)リ ン クnの タ イ プ1の τn-UIPは,nn-1,fn-1の 値 が 不 変 も し く は τj(j<n)の 値 が 不 変 と な る 条 件 で リ ン クn-1の パ ラ メ ー タ と編 成 し,リ ン クn-1の パ ラ メ ー タ に 組 み 込 む . 3)編 成 し た リ ン クn-1の パ ラ メ ー タ に 対 し,改 め て 1),2)に お い てnをn-1に 置 換 し て 同 様 な 操 作 を 行 う.こ れ を リ ン ク1の パ ラ メ ー タ ま で 実 行 す る. こ の 手 順 で 編 成 し た パ ラ メ ー タ は τn-IP,τn-1-IP, …,τ1-IPの い ず れ か に な り,τi-UIP(I≦i≦n)は 存 在 し な い.し た が っ て,最 小 数 の パ ラ メ ー タ が 得 ら れ る.以 下 で は,そ の 編 成 が 実 現 可 能 な こ と を 示 す.な お,式 の 展 開 の 簡 素 化 を 図 る た め,常 に 平 行 とな る 関 節 軸 は 正 方 向 を 同 一 方 向 に とる こ と に す る. 4.リ ン クnの τn-IPと タ イ プIの τn-UIP 可 同 定 パ ラ メ ー タ は リ ン ク の 機 構 構 成 と重 力 方 向 に よ り異 な る.Σ0の20軸 は 固 定 座 標 軸 で あ る が,重 力 方 向 と 一 致 さ せ,20軸 をν0=0,ν0=90を 生 成 す る 仮 想 直 動 関 節 軸 と す る こ と に よ り重 力 の 影 響 を 直 動 関 節 が ひ と つ 増 え た こ と と 等 価 に 扱 う こ と が で き る.こ こ で,リ ン ク の 機 構 構 成 に よ る 分 類 の た め,2%軸 に 対 し て 次 の4つの 集 合 を 定 義 す る.た だ し,異 な る 関 節 軸 が 平 行 と は,関 節 変 位 の 変 化 に か か わ らず 常 に 平 行 で あ る こ と を 意 味 す る も の とす る. SnR={zj│zj(0≦j<n)はR軸 でZnに 平 行} SnR ={zj│zj(0≦j<n)はR軸 でZnに 平 行 で な い} SnT={zj│zj(0≦j<n)はT軸 でZnに 平 行} SnT={zj│zj(0≦j<n)はT軸 でZnに 平 行 で な い} (17) 任 意 のzj(0≦j<の は,4つ の 集 合 の い ず れ か の 要 素 と な り,こ の4つ の 集 合 の 要 素 の 合 計 はnで あ る.さ ら に, SnRの 部 分 集 合SnRsを 次 の よ う に 定 義 す る. SnRs={zj│zj∈SnRとznと の 距 離 が 零 で な い} (18) 以 下 で は,集 合Sが 空 集 合 の と きS=0,集 合SAとSB の 和 集 合 をSA∪SBA関 節 軸ziとzjが 平 行 の と き は zi〓zj,平 行 で な い と き はzi〓zjと 表 す.ま た,任 意 の 3×1ベ ク トルjαiはjai=(jia,x,jai,jai,z)T,任 意 の 3×3行 列AiはAi={Ai,jk}と 記 述 す る.た だ し,Ai ,jkは 行 列Aiのj行k列 要 素 で あ る.さ ら に,次 の 行 列 と ベ ク トル を 定 義 す る. U=diag(1,1,0)(19)
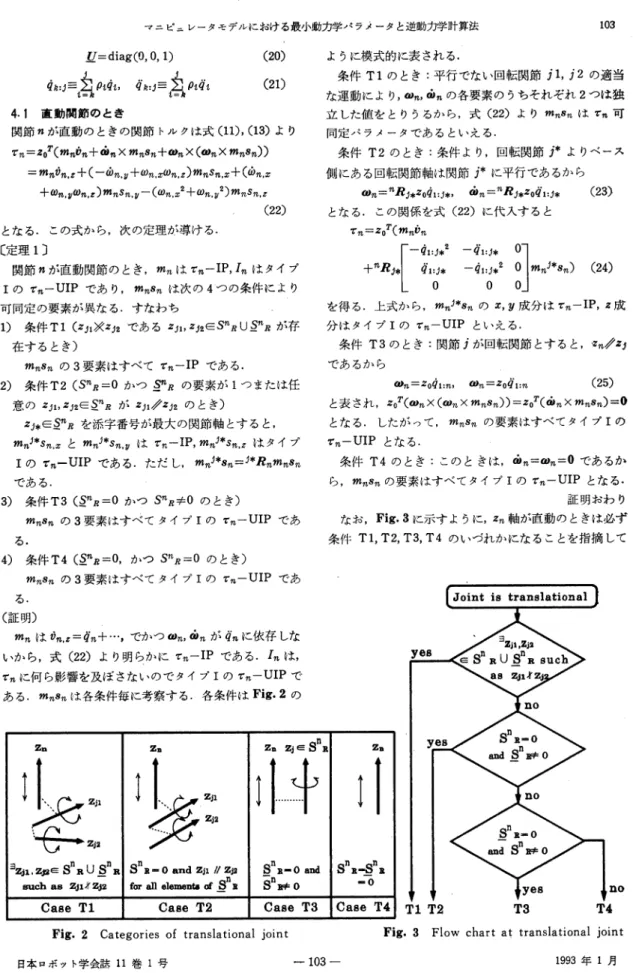
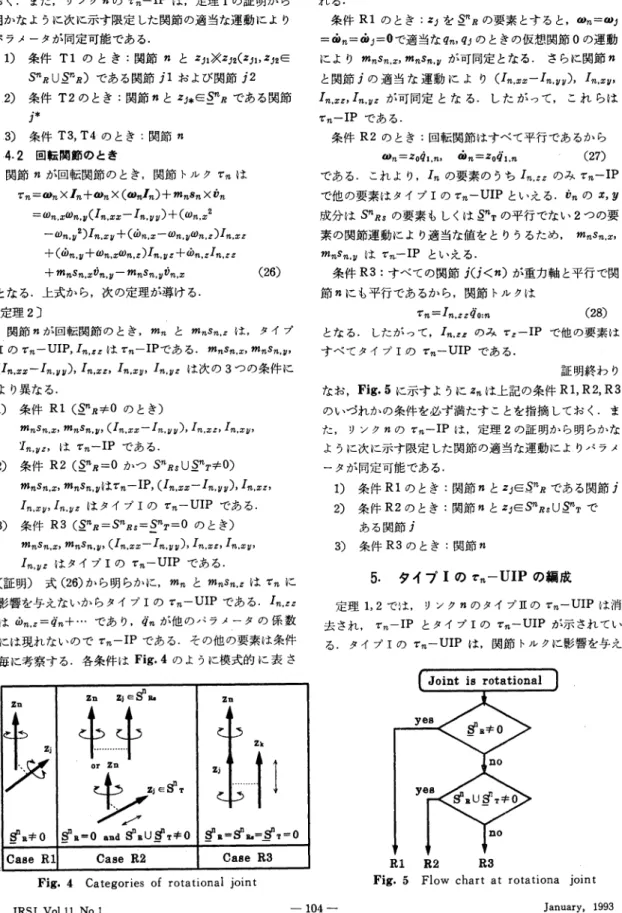
マ ニ ピュ レー タ モ デ ル に お け る 最 小 動 力学 パ ラ ヌー タ と逆 動 力学 計 算 法 103 U=diag(0,0,1)(20) 〓 (21) 4.1直 動 関 節 の と き 関 節nが 直 動 の と き の 関 節 トル クは 式(11),(13)よ り 〓(22) と な る.こ の 式 か ら,次 の 定 理 が 導 け る. 〔定 理1〕 関 節nが 直 動 関 節 の と き,mnは τn-IP,Inは タ イ プ Iの τn-UIPで あ り,mnsnは 次 の4つ の 条 件 に よ り 可 同 定 の 要 素 が 異 な る.す な わ ち. 1)条 件T1(zj1〓zj2で あ るzj1,zj2∈SnR∪SnRが 存 在 す る と き) mnsmの3要 素 は す べ て τn-IPで あ る. 2)条 件T2(SnR=0か つSnRの 要 素 が1つ ま た は 任 意 のzj1,zj2∈SnRがzj1/zj2の と き) zj*∈SnRを 添 字 番 号 が 最 大 の 関 節 軸 とす る と, mn*S n,xとmnj*Sn.vは τπ-IP,mnj*Sn,zは タ イ プ Iの τn-UIPで あ る.た だ し,mnj*sn=j*Rnmnsn で あ る. 3)条 件T3(SnR=0か つSnR≠0の と き) mnsnの3要 素 は す べ て タ イ プIの τn-UIPで あ る. 4)条 件T4(SnR=0,か つSnR=0の と き) mnsnの3要 素 は す べ て タ イ プ1の τn-UIPで あ る. (証 明) mnはvn,z=qn+…,で か つ ωn,Wnがqnに 依 存 し な い か ら,式(22)よ り 明 ら か に τn-IPで あ る.Inは, τπ に 何 ら 影 響 を 及 ぼ さ な い の で タ イ プ1の τn-UIPで あ る.mnsnは 各 条 件 毎 に 考 察 す る.各 条 件 はFig.2の よ う に 模 式 的 に 表 さ れ る. 条 件T1の と き:平 行 で な い 回 転 関 節j1,j2の 適 当 な 運 動 に よ り,ωn,ωnの 各 要 素 の う ち そ れ ぞ れ2つ は 独 立 した 値 を と り う る か ら,式(22)よ りmnnはzn可 同 定 パ ラ メ ー タ で あ る と い え る. 条 件T2の と き:条 件 よ り,回 転 関 節j*よ り ベ ー ス 側 に あ る 回 転 関 節 軸 は 関 節j*に 平 行 で あ る か ら ωn=nRj*zoq1*,j*,ωn=nRj*zoq1*(23) と な る.こ の 関 係 を 式(22)に 代 入 す る と τn=zoT(mnvn 〓(24) を 得 る.上 式 か ら,mnj*Snのx,y成 分 は τn-IP,z成 分 は タ イ プIの τn-UIPと い え る. 条 件T3の と き:関 節jが 回 転 関 節 とす る と,zn〓zj で あ る か ら ωn=zoq1:n,ωn=zoq1,n(25) と表 さ れ,zoT(ωn×(ωn×mnsn))=zoT(ωn×mnsn)=0 と な る.し た が っ て,mnsnの 要 素 は す べ て タ イプIの τn-UIPと な る. 条 件T4の と き:こ の と き は,ωn=ωn=0で あ る か ら,mnsnの 要 素 は す べ て タ イ プIの τn-UIPと な る. 証 明 お わ り な お,Fig.3に 示 す よ う に,zn軸 が 直 動 の と き は 必 ず 条 件T1,T2,T3,T4の い つ れ か に な る こ と を 指 摘 し て
Fig. 2 Categories of translational
joint
Fig. 3 Flow chart at translational
joint
お く.ま た,リ ン クnの τn-IPは,定 理1の 証 明 か ら 明か な よ うに次 に示 す 限 定 した 関 節 の 適 当 な 運 動 に よ り パ ラ メー タが 同定 可 能 で あ る. 1)条 件T1の と き:関 節nとzj1〓zj2(zj1,zj2∈ SnR∪SnR)で あ る関 節j1お よび 関 節j2 2)条 件T2の と き:関 節nとzj*∈SnRで あ る 関節 j* 3)条 件T3,T4の と き:関 節n 4.2回 転 関 節 の と き 関 節nが 回 転 関 節 の と き,関 節 ト ル ク τnは zn=ωn×In+ωn×(ωnIn)+mnsn,×vn =ωn ,xωn,y(In,xx-In,yy)+(ωn,x2 -ω n.y2)In,xy+(ωn,x-ωn,yωn,z)In,xz +(ωn,y+ω π.xωn,z)In,yz+ωn,zIn,zz + mnsn .xνn,y-mnsn,yvn,x(26) と な る.上 式 か ら,次 の 定 理 が 導 け る. 〔 定 理2〕 関 節nが 回 転 関 節 の と き,mnとmnsn,zは,タ イ プ 1の τn-UIP,In,zzは τn-IPで あ る.mnsn.x,mnsn,y,(
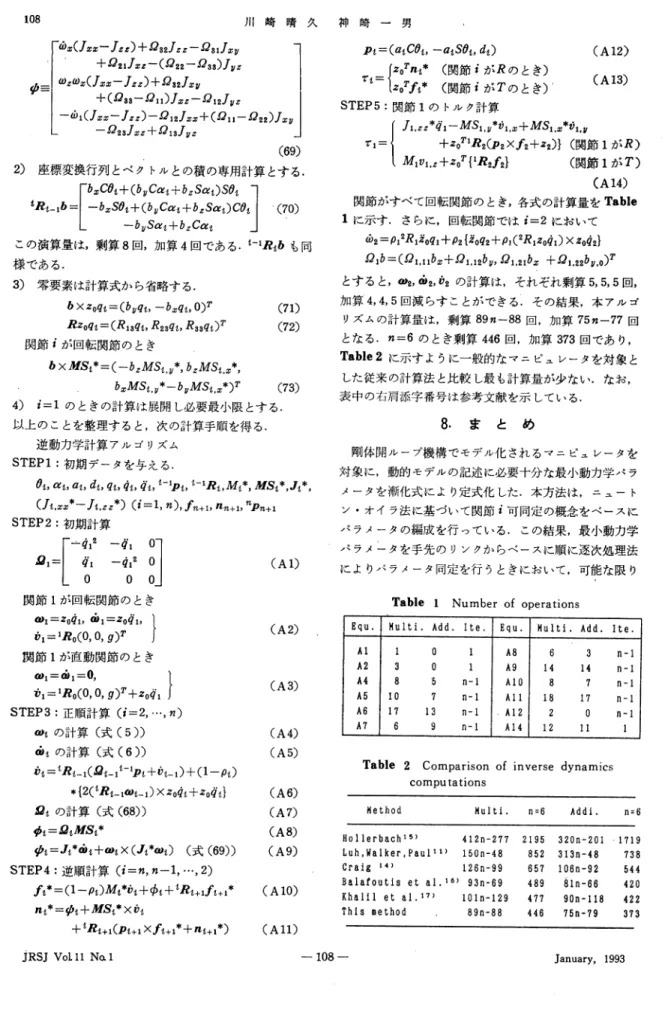
In.xx-In,,yy),In,xz,In,xy,In,yzは 次 の3つ の 条 件 に よ り異 な る. 1)条 件R1(SnR≠0の と き) mnsn .x,mnsn,y,(In,xx-In,yy),In,xz,In,xy, In.yz,は τn-IPで あ る. 2)条 件R2(SnR=0か っSnRsUSnT≠0) mnSn,x,mnSn.yは τn-IP,(In,xx-In,yy),In,xz, In ,xy,In.yzは タ イ プ1のz'n-UIPで あ る ・ 3)条 件R3(SnR=SnRs=SnT=0の と き) mnsn,x,mnSn,y,(In,xx-Iπ,yy),In,xz,In,xy, In,yzは タ イ プIの τn-UIPで あ る.
(証 明)式(26)か ら 明 ら か に,mnとmnsn,zは τnに 影 響 を 与 え な い か ら タ イ プIの τn-UIPで あ る.In,zz は ωn,z=qn+… で あ り,qnが 他 の パ ラ メ ー タ の 係 数 に は 現 れ な い の で τn-IPで あ る.そ の 他 の 要 素 は 条 件 一毎 に 考 察 す る.各 条 件 はFig.4の よ う に 模 式 的 に 表 さ れ る. 条 件R1の と き:zjをSnRの 要 素 と す る と,ωn=ωj =ωn=ωj=0で 適 当 なqn,qjの と き の 仮 想 関 節0の 運 動 に よ りmnSn,2,mnSn,yが 可 同 定 と な る.さ ら に 関 節n と 関 節jの 適 当 な 運 動 に よ り(In,xx-In,yy),In.xy,In,xz ,In.yzが 可 同 定 と な る.し た が っ て,こ れ ら は τn-IPで あ る. 条 件R2の と き:回 転 関 節 は す べ て 平 行 で あ る か ら ωn=zoqi,n,ωn=zoq1,n(27)
で あ る.こ れ よ り,Inの 要 素 の う ちIn.zzの み τn-IP で 他 の 要 素 は タ イ プ1の τn-UIPと い え る.νnのx,y 成 分 はERsの 要 素 も し く はSnTの 平 行 で な い2つ の 要 素 の 関 節 運 動 に よ り適 当 な 値 を と り う る た め,mnsn,x,mnsn .yは τπ-IPと い え る. 条 件R3:す べ て の 関 節j(j<n)が 重 力 軸 と平 行 で 関 節nに も 平 行 で あ る か ら,関 節 トル ク は τn=In,zzqo:n(28) と な る.し た が っ て,In,zzの み τz-IPで 他 の 要 素 は す べ て タ イ プIのzn-UIPで あ る. 証 明 終 わ り な お,Fig.5に 示 す よ う にznは 上 記 の 条 件R1,R2,R3 の い つ れ か の 条 件 を 必 ず 満 た す こ とを 指 摘 し て お く.ま た,リ ン クnの τn-IPは,定 理2の 証 明 か ら 明 ら か な よ う に 次 に 示 す 限 定 した 関 節 の 適 当 な 運 動 に よ,りパ ラ メー タ が 同 定 可 能 で あ る. 1)条 件R1の と き:関 節nとzj∈snRで あ る 関 節j 2)条 件R2の と き:関 節nとzj∈SnRs∪SnTで あ る 関 節j 3)条 件R3の と き:関 節n 5.タ イ プ1の τn-UIPの 編 成 定 理1,2では,リ ン クnの タ イ プIIの τn-UIPは 消 去 さ れ,τ π-IPと タ イ プ1の τn-UIPが 示 さ れ て い る.タ イ プIのTn-UIPは,関 節 ト ル ク に 影 響 を 与 え
Fig. 4 Categories of rotational
joint
Fig. 5 Flow chart at rotationa
joint
マ ニ ピ ュ レー タ モ デ ル に お け る 最 小 動 力学 パ ラ メ ー タ と逆 動 力学 計 算 法 105 な い 条 件 で リ ン ク π一1の パ ラ メ ー タ に 組 み 込 む.以 下 で は,τn-UIPを 零 と し て τn-IP要 素 か ら な る リ ン ク η の パ ラ メ ー タ をMn*,MSn*,Jπ*で 表 す こ と に す る.明 らか に,τnの 値 は,こ れ らMm*,MSπ*,Jn*を 適 用 し た と き と オ リ ジ ナ ル な パ ラ メ ー タ を 適 用 した と き は 一 致 す る. 5.1直 動 関 節 の と き 関 節 ” が 直 動 関 節 の と き,次 の 定 理 が 導 け る. 〔 定 理3〕 関 節nが 直 動 関 節 の と き,次 の2つ を 仮 定 し て も 関 節 トル ク の 計 算 値 は 不 変 で あ る. 1)リ ン ク π の パ ラ メ ー タ はMn*,MSπ*,Jn*で あ る. 2)リ ン ク ”-1の パ ラ メ ー タ はMπ-1,MSn-1,Jn-1で あ る. こ こ で Mn-1=mn-1 MSn-1={mn-1sn-1(IF T1, T2, T4)mn-1sn-1+n-1RnMSn(IF T3)) 〓で あ る.た だ し,Mπ=mn,MSn=mnsn,Jn=In,Jn ,zz=Jn,zz+2α π(MSn,xCθn+MSn,ySθn) で あ る. (証 明)は じ め に,mn,mnsn,Inを そ れ ぞ れMn,MSn, Jnに 置 き換 え,各 条 件 毎 に 考 察 す る. 条 件T1の と き:定 理1よ り,
Mn*=MnMSn*=MSnJn*=0
}(29))
で あ る.こ こ で,Jnは τπ に 影 響 を 与 え な い がnn,fn に は 影 響 を 与 え る.そ こ で,パ ラ メ ー タ.Mn*,MSn*,Jn* を 適 用 した と き の 関 節n-1か ら 関 節 η に 作 用 す る モ ー メ ン ト と力 を そ れ ぞ れnn*,fn*と す る と fn*=Mπ*νn+ωn×(MSn*)+ωn×(ωn×(MSn*)) (30) nn*=MSn*×νn(31) を 得 る.上 式 よ りfnとnnは fn=fn*(32) nn=nn*+Jnωn+ω π×(Jnωn)(33) と表 す こ と が で き る.こ こ で,式(13),(32)よ りfn-1 は fn-1=Fn-1[Mn-1,MSn-1,fn*](34) と 表 せ る.同 様 に,nn-1は 式(14)に 式(32),(33)を 代 入 し,運 動 学 の 漸 化 式(5),(6)を 用 い て 変 形 す る と nn -1=Nn-1[Jn-1,MSπ-1,fn*,nn*](35) と な る.式(30),(31),(34),(35)か ら,リ ン クn-1の パ ラ メ ー タ をMn-1,MSn-1,Jn-1と し,リ ン クnの パ ラ メ ー タ を 式(29)で 表 さ れ るMn*,MSn*,Jn*と して も fn-1とnn-1の 値 は 不 変 な た め,ト ル ク の 計 算 値 も 不 変 とな る. 条 件T2の と き:定 理1よ り Mn*=MnMSn*=nRj*Uj*MSnJn*=0(36) で あ る.条 件T1の と き と 同 様 に,式(36)のMn*,MSn*, Jn *を 適 用 した と き のfn*とnn*は 式(30),(31)で 表 さ れ る.こ こ で, MSn=MSn*+nRj*Uj*MSn(37) で あ り,式(23)よ り任 意 のi(i≦n)に 対 し て ωi×(Rnj*UjMS*n)=ωi×(nRj*Uj*MSn)=0 (38) の 関 係 が 成 り立 つ か ら fn=fn*(39)nn =nn*+Jnωn+ωn×(Jnωn) +nRj*Uj*MSn×νn(40) と表 せ る.式(37)∼(40)を 式(13),(14)に 代 入 し整 理 す る と ∫n-1は 式(34)で 表 さ れ,nn-1は nn-1=Nn-1[」Jn-1,MSπ-1,fn*,nn*] +n-1Rj *Uj*n×MSn-1Rnνn(41) を 得 る.こ こ で,式(41)右 辺 第2項 は 直 動 関 節 に は な ん ら影 響 し な い.回 転 関 節k(K<n)の に は 関 節 トル ク分 と し てzoT(kRj*Uj*NSn×kRnνn)と し て 影 響 す る が,zk〓zj *の た め こ の 値 は 零 で あ る.し た が っ て,式(41)の 代 わ りに 式(35)でnn-1を 計 算 し て も トル ク計 算 値 に は 影 響 しな い.た だし,nn-1の 値 そ の も(ρは 真 の 値 と は 異 な る.以 上 か ら,リ ン クn-1の パ ラ メ ー タ をMn-1MSn-1,Jn-1と し,リ ン ク π の パ ラ メ ー タ は 式(36)で 示 さ れ るMNπ*,MSn*,JN*と し て も トル クの 計 算 値 も 不 変 で あ る. 条 件T3の と き:定 理1よ りMn*=MnMSn*=0Jn*=0
}(42)
で あ る.こ の パ ラ メ ー タ を 適 用 した と き,nn*とfn*は fn*=M π*νn(43) nn*=0(44) と な る.こ れ よ り fn=fn*+ωn×(MSn)+ωn×(ωn×(MSπ))(45) nn=nn*+JNωn+ωn×(Jnωn)+MSn×νn(46) を 得 る.式(45),(46)を 式(13)に 代 入 し,漸 化 式 の 運 動 学 関 係 式 を 用 い て 整 理 す る と ∫n-1は 式(34)で 表 さ れ, 日本 ロボ ッ ト学 会誌11巻1号 105 1993年1月nn-1は 付 録A2に 示 す よ う に nn-1=Nn-1[Jn-1,MSn-1,fn*,nn*]+ωn-1(47) と な る.た だ し, Jn =Jn+2pnTMSnE3-MSnPnt-pnMSnT(48) ωn-1=n-1Rn{MSn×zoqn+(Jn-JN,zzU)ωn +ωn×(Jn+Jn ,zzU1)ωn}(49) で あ る.こ こ で,ωn-1は 直 動 関 節 に は 影 響 を 与 え な い 項 で あ る.回 転 関 節j(j<n)で は トル クzoTjRn-1ωn-1 と し て 影 響 す る が,zj〓znと 式(25)の 関 係 よ り こ の 値 は 零 と な る.し た が っ て,式(47)の 代 わ り に 式(35)で 計 算 し て も ト ル ク の 計 算 に 影 響 し な い.以 上 か ら,リ ン ク π一1の パ ラ メ ー タ をMn-1,NSn-1,Jn-1と し,リ ン ク π の パ ラ メ ー タ を 式(42)で 表 さ れ るMn*,MSπ*, Jπ*で あ る と し て も トル ク の 計 算 値 は 不 変 で あ る. 条 件T4の と き:MN*,MSn*,Jn*は 式(42)で 表 さ れ る.こ の 条 件 の と き の ベ ー ス 側 の 関 節 は 直 動 関 節 の み で あ る か ら,明 らか に リ ン クn-1の パ ラ メ ー タ をMn-1, M Sπ-1,Jn-1,リ ン ク π の パ ラ メ ー タ を 式(42)で 表 さ れ るMn*,MSn*,Jn*で あ る と し て も,ト ル ク の 計 算 値 は 不 変 で あ る. 証 明 終 わ り な お,関 節 ” が 直 動 関 節 の と き はnRn-1は 定 数 行 列 で あ る か ら,Mn-1,MSn-1,Jn-1は 定 数 パ ラ メ ー タ で あ る 5.2回 転 関 節 の と き 関 節 ” が 回 転 関 節 の と き,次 の 定 理 が 導 け る. 〔定 理4〕 関 節nが 回 転 関 節 の と き,次 の2つ を 仮 定 し て も 関 節 トル ク の 計 算 値 は 不 変 で あ る. 1)リ ン ク ” の パ ラ メ ー タ はMn*,”MSn*,Jn*で あ る. 2)リ ン ク π一1の パ ラ メ ー タ はMn-1,MSπ-1,Jn-1で あ る. こ こ で Mπ-1=mn-1+Mn
MSn-1=
{mn-1Sn-1+Mnn-1Pn+n-1rn(IF R1, R2)mn-1Sn-1(IF R3)Jn-1=
{In-1+Jn,yyn-1RnUnRn-1+n-11Gn(IF R1)In-1+n-1Gn(IF R2)In-1(IF R3)
で あ る.た だ し,Mn=mn,MSn=mnsn,Jn=In, n- 1rn=n-1RnUMSnn-1Gn=Mn(n-1PnTn-1E3-n-1nPn-1PnT)+2n-1PnTn-1rnE3-n-1Pnn-1rnT-n-1nrn-1PnT で あ る. (証 明)は じめ に,mn,mnsn,Inを そ れ ぞ れMn,MSn, Jn %に 置 き換 え,各 条 件 毎 に 考 察 す る. 条 件R1の と き:定 理2よ り, Mn*=0MSn*=UMSnJn*=Jn-Jn,yyU}(50)と 表 せ る.こ こ で,Mn*,MSn*,Jπ*を 適 用 し た と き の リ ン クn-1か ら リ ン ク ” に 作 用 す る モ ー メ ン ト と 力 を nn * ,fnと す る と fn *=ωn×(n*MS)+ω π×(ωn×(MSn*))(51) nn*=Jn*ωn+ωn×(Jn*ωn)+MSn*×νn(52) を 得 る.こ の と き,fnとnnは fn=fn*+Mnνn+ωn×(UMSn) +ωn×(ωn×(UMSn))(53) nn=nn*+(Jn-Jn*)ω π+ωn×((Jn+-Jn*)ωn) +UMSn×νπ(54) と表 せ る.∫n-1と πn-1は 付 録A3,A4に 示 す よ う に はみ-1=Fみ-1[もみ-1,MSn-1,MSn-1,fn*](55) nn-1=Nn-1[Jn-1,MSn-1,fn*,nn*](56) と表 さ れ る.式(51),(52),(55),(56)か ら,リ ン クn-1 の パ ラ メ ー タ をMN-1,MSn-1,Jn-1と し,リ ン クnの パ ラ メ ー タ を 式(50)で 表 すMn*,MSn*,Jn*と し て も fn-1とnn-1の 値 は 不 変 で あ り,ト ル ク の 計 算 値 も 不 変 と な る. 条 件R2の と き:定 理2よ り Mn*=0MSn*=UMSnJn*=Jn,zzU}(57)で あ る.こ こ で,条 件R1の と き と 同 様 に,nn*とfn* を 求 め る と,式(51),(52)と 同 一 表 現 に な る.ま た,fn ,nnも 式(53),(54)で 表 さ れ る.さ ら に,fn-1を 求 め る と式(55)式 と 同 一 表 現 とな り,nn-1も 付 録A5で 示 す よ う に 式(56)と 同 一 表 現 と し て も トル ク計 算 値 に 影 響 し な い.こ の こ とか ら,リ ン ク ”一1の パ ラ メ ー タ をMn-1,MSn-1,JN-1と し,リ ン ク ” の パ ラ メ ー タ を 式 (57)で 表 すMn*,MSn*,Jn*と し て もfn-1とnn-1の 値 は 不 変 で あ り,ト ル ク の 計 算 値 も 不 変 と な る. 条 件R3の と き:こ の と き は,定 理2よ り
Mn*=0MSn*=0Jn*=Jn,zzU
}(58)
で あ る.条 件 よ り,Mπ を 除 く τn-UIPは,τk(K<n) に な ん ら 影 響 しな い.し た が っ て,リ ン クn-1の パ ラ メ ー タ をMn-1,MSn-1,Jn-1と し,リ ン ク ” の パ ラ メ ー タ を 式(58)で 表 すMn*,MSn*,Jπ*と し て も,ト ル ク の 計 算 値 は 不 変 と な る. 証 明 終 わ りマ ニ ピュ レ ータ モ デ ル に お け る最 小 動 力 学 パ ラ メ ー タ と逆 動 力 学 計 算 法 107 な お,n-1rnは 展 開 す る と n-1rn=(0 ,-MSn,zSαn,MSn,zCαn)T で 表 さ れ る 定 数 で あ る か ら,定 理4のMn-1,MSn-1,Jn-1は全 て 定 数 パ ラ メ ー タ で あ る. 6.パ ラ メ ー タ の 再 編 成 リ ン クnと リ ン クn-1の パ ラ メ ー タ の 編 成 法 を5節 で 述 べ た.定 理1か ら 定 理4で は,リ ン ク π の 先 端 に 作 用 す る 外 力fn+1と 外 モ ー メ ン トnn+1と を 零 と し て 論 証 し た が,こ れ ら が 観 測 で き る な ら ば 外 力,外 モ ー メ ン ト が 作 用 し て い て も そ の 分 の トル ク を 差 し 引 く こ と に よ り 定 理1か ら定 理4は そ の ま ま 成 り立 つ.こ の 関 係 は,編 成 後 の リ ン クn-1の パ ラ メ ー タ.Mn-1,MSn-1,Jn-1を そ れ ぞ れmn-1,mn-1,sn-1,In-1,と 置 換 え る こ と に よ り, リ ン クn-2の パ ラ メ ー タ と の 編 成 が,定 理1∼4に お い てnの か わ りにn-1を 代 入 し 再 編 成 を 行 え ば よ い こ と を 意 味 す る.こ の 場 合,リ ン クn-1に は 外 力fn*, nn*が 作 用 す る が,こ れ ら は 観 測 で き る と見 な せ る.こ の 編 成 を リ ン ク1ま で 繰 り返 す こ と に よ りす べ て の 可 同 定 パ ラ メ ー タ が 求 め ら れ る.し た が っ て,リ ン クiの 編 成 後 の パ ラ メ ー タ をMi,MSi,Jiと す る と,次 式 で 与 え ら れ る. Mi-1 ={Mi-1(関節iがTのとき)mi-1+Mi(関節iがTのとき)(59)
MSi-1=
{mi-1si-1(IF T1,T2,T4,R3)mi-1si-1+i-1RiMSi(IF T3)mi-1si-1+Mii-1Pi+i-1r1(IF R1,R2)(60)
〓(61) た だ し 〓(62) 〓(63) 〓(64) こ こ で,初 期 条 件 はMn=mn,MSn=mnsn,Jn=Inで あ る.な お,i-1RiUiRi-1は 定 数 行 列 で あ り,関 節5が 直 動 関 節 の と きi-1瓦 は 定 数 行 列 で あ る か ら,数 学 的 帰 納 法 を 用 い る こ と に よ りMi,MSi,Jiは 全 て 定 数 で あ る こ と が 容 易 に 示 せ る.こ の よ う に 編 成 す る と リ ン クiの τi-IPはMi*,MSi*=(MSi.x*,MSi,y*,MSi,z*)T,Ji* ={Ji ,jk*}と な る.こ こ で,零 で な い 要 素 は 次 の と お り で,そ れ ら は 右 肩 上 の*な い パ ラ メ ー タ と 一 致 す る. 1)関 節5が 直 動 関 節 の と き 条 件T1:Mi*,MSi,x*,MSi,y*,MSi,z*の4つ 条 件T2:Mi*,j*MSi,x*,j*MSi,y*の3つ(た だ し,j *<i)はSiRの 要 素 の 中 で 最 大 の 関 節 番 号) 条 件T3:Mi*の1つ 条 件T4:Mi*の1つ 2)関 節iが 回 転 関 節 の と き 条 件R1:MSi,x*,MSi,y*,ji,xx*,ji,zz*,ji,xy*, Ji,xz*,ji,yz*の7つ 条 件R2:MSi,x*,MSi,y*,Ji,zz*の3つ 条 件R3:Ji,zz*の1つ π 自 由 度 ロ ボ ッ トの 動 力 学 パ ラ メ ー タ は10n個 で あ る が,上 記 の よ う に パ ラ メ ー タ を 編 成 す る こ と に よ り, 最 小 の 動 力 学 パ ラ メ ー タ の 数Nminは Nmin=4NT1+3NT2+NT3+NT4+7NR1 +3NR2+NR3(65) と な る.た だ し,N1は 条 件iの 関 節 数 で あ り,そ の 総 和 は π=NT1+NT2+NT3+NT4+NR1+NR2+NR3 (66) で あ る.上 記 のNmiの 値 は,表 現 形 式 は 異 な る が 文 献 10)の 結 果 と 一 致 し て い る. 7.最 小 動 力 学 パ ラ メ ー タ に よ る 逆 動 力 学 計 算 関 節 トル ク は 式(13),(14)に 直 接 パ ラ メ ー タ.Mi*, MSi * ,Ji*を 代 入 して 計 算 で き る.し か し,こ の パ ラ メ ー タ は 零 要 素 が 多 い .計 算 の 高 速 化 に は パ ラ レル 演 算 は 有 効 で あ る が,こ こ で は 単 一 の プ ロ セ ッサ で 演 算 す る こ と を 前 提 に,次 の 方 針 で 計 算 量 の 低 減 を 試 み る. 1)ベ ク トル 積 を 行 列 と ベ ク トル と の 積 に 変 更 す る. ω,b∈R3x1を 任 意 の ベ ク トル と し,Ω={Ωij}∈R3×3 を ω×b+ω ×(ω ×b)=Ωb(67) を 満 た す 行 列 と 定 義 す る と 〓(68) で 与 え ら れ る.ま た,行 列J∈R3x3の 要 素Jyyが 零 の と き,ψ を ψ ≡Jω+ω ×(Jω) と定 義 す る と次 式 で 計 算 で き る. 日本 ロボ ッ ト学 会 誌11巻1号 107 1993年1月
川 崎 晴 久 神 崎 一 男, 〓(69) 2)座 標 変 換 行 列 と ベ ク トル と の 積 の 専 用 計 算 と す る. 〓(70) こ の 演 算 量 は,剰 算8回,加 算4回 で あ る.i-1Ribも 同 様 で あ る. 3)零 要 素 は 計 算 式 か ら 省 略 す る. b×zoqi=)(byqi,-bxqi,0)T(71) Rzoqi=(R13qi,R23qi,R33qi)T(72) 関 節iが 回 転 関 節 の と き b×MSi*=(-bzMSi,y*,bzMSi,x*,bxMSi,y*-byMSi,x* )T(73) 4)i=1の と き の 計 算 は 展 開 し必 要 最 小 限 とす る. 以 上 の こ と を 整 理 す る と,次 の 計 算 手 順 を 得 る. 逆 動 力 学 計 算 ア ル ゴ リ ズ ム STEP1:初 期 デ ー タ を 与 え る . θi,αi,ai,4i,qi,qi,qi,i-1Pi,i-1Ri,Mi*,MSi*,Ji*, (Ji,xx*-Ji,zz*)(i=1,n),fn+1,nn+1,nPn+1 STEP2:初 期 計 算 〓(A1) 関 節1が 回 転 関 節 の と き 〓(A2) 関 節1が 直 動 関 節 の と き 〓(A3) STEP3:正 順 計 算(i=2,…,n) ωiの 計 算(式(5))(A4) ωiの 計 算(式(6))(A5) 〓(A6) Ωiの 計 算(式(68))(A7) φi=ΩiMSi*(A8) ψi=Ji*ωi+ωi×(Ji*ωi)(式(69))(A9) STEP4:逆 順 計 算(i=n,n-1,…,2) fi*=(1-ρi)Mi*νi+φi+iRi+1fi +1(A10) 〓(A11) Pi=(αiCθi,-aiSθi,di)(A12) τi={zotni*(関節iがRのとき)zotfi*(関節iがTのとき)(A13) STEP5:関 節1の トル ク計 算
τi={J1,zz*q1-MS1,v*v1,x+MS1,x*v1,v+zot1R2(R2(P2×f2+z2)}(関節1がR)M1v1,z+zot{1Rcf2}(関節1がT)
(A14) 関 節 が す べ て 回 転 関 節 の と き,各 式 の 計 算 量 をTable 1に 示 す.さ ら に,回 転 関 節 で はi=2に お い て ω2=ρ12R1zoq1+ρ2{zoq2+p1(2R1zoq1)×zoq2} Ω1b =(Ω1 ,11bx+Ω1,12by,Ω1,21bx+Ω1,22by,0)T と す る と,ω2,ω2,ν2の 計 算 は,そ れ ぞ れ 剰 算5,5,5回, 加 算4,4,5回 減 ら す こ と が で き る 二 そ の 結 果,本 ア ル ゴ リズ ム の 計 算 量 は,剰 算89n-88回,加 算75n-77回 と な る.n=6の と き 剰 算446回,加 算373回 で あ り, Table2に 示 す よ う に 一 般 的 な マ ニ ピ ュ レ ー タ を 対 象 と し た 従 来 の 計 算 法 と比 較 し最 も 計 算 量 が 少 な い.な お, 表 中 の 右 肩 添 字 番 号 は 参 考 文 献 を 示 し て い る. 8.ま と め 剛 体 開 ル ー プ 機 構 で モ デ ル 化 さ れ る マ ニ ピ ュ レ ー タ を 対 象 に,動 的 モ デ ル の 記 述 に 必 要 十 分 な 最 小 動 力 学 パ ラ メ ー タ を 漸 化 式 に よ り定 式 化 した.本 方 法 は,ニ ュ ー ト ン ・オ イ ラ法 に 基 づ い て 関 節i可 同 定 の 概 念 を ベ ー ス に パ ラ メ ー タ の 編 成 を 行 っ て い る.こ の 結 果,最 小 動 力 学 パ ラ メ ー タ を 手 先 の リ ン クか ら ベ ー ス に 順 に 逐 次 処 理 法 に よ り パ ラ メ ー タ 同 定 を 行 う と き に お い て,可 能 な 限 りTable 1 Number of operations
Table 2 Comparison of inverse dynamics computations
マ ニ ピ ュ レー タ モデ ル に お け る最 小 動 力 学 パ ラ メ ー タ と逆 動 力 学 計 算 法 109 少 な い 関 節 の運 動 で 同 定 す る た め の駆 動 す べ き関 節 が 明 か とな って い る.ま た,本 方 法 で求 め た最 小動 力 学 パ ラ メ ー タは,従 来 か らあ る ニ ュ ー トン ・オ イ ラ法 に よる逆 動力 学 計 算 ア ル ゴ リズ ムに 直 接 適 用 でき る.ま た,最 小 動力 学 パ ラ メ ー タ の適 用 を 前 提 と した 単一 の プ ロセ ッサ で 計 算 す る場 合 の 最 も計 算効 率 が よい逆 動 力 学 計 算 ア ル ゴ リズ ムを 示 した. 本 最 小 化 法 の利 用 に よ り,パ ラ メ ー タ同 定 や 適 応 制 御 1にお い て シ ス テ ム の次 数 が最 小 に で き る と ともに 真 の値 の推 定 が可 能 とな る.さ ら に,提 案 した 逆 動 力 学 計 算 法 は実 時 間 制 御 や 実 時 間 シ ミュ レー シ ョ ンに貢 献 す る も の で あ る. 参 考 文 献 1) 川崎晴久,西 村国俊,“ マニ ピュ レータのパ ラメータ 同 定”,計測 自動制御学会論文集,第22巻 第1号,pp.76-83,1986.
2) C. H. An, C. G. Atkeson and J. M. Hollerbach, •gEsti-mation of Inertial Parameters of Rigid Body Links of Manipulators•h, Proc. of 24 th Conf. on Decision and Control, pp. 990-995, 1985.
3) H. Mayeda, K. Osuka and A. Kangawa, •gA New Identification Method for Serial Manipulator Arm, in Proc. 24 th Conf. on Decision and Control, pp. 990-995, 1984.
4) G. Niemeyer and J. E. Slotine, •gComputational Algo rithms for Adaptive Compliant Motion•h, Proc. of IEEE Int. Conf. on Robotics and Automations, pp.566-571, 1989.
5) P. K. Khosla, •gCategorization of Parameters in the Dynamic Robot Model•h, IEEE Trans, on Robotics and Automation, Vol.5, No.3, pp. 261-268, 1989. 6) W. Kalil, J. F. Kleinfinger and M. Gautier, •gReducing
the Computational Burden of the Dynamic Models of Robots•h, Proc. of IEEE Int. Conf. on Robotics
and Automations, pp. 525-531, 1986.
7) M. Gautier and W. Khalil, •gA Direct Determination of Minimum Inertial Parameters of Robots•h, Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 1682-1687 (1988).
8) W. Khalil, F. Bennis and M. Gautier, •gThe Use of the Generalized Links to Determine the Minimum Inertial Parameters of Robots•h, Jour. of Robotic Systems, Vo17, No. 2, pp. 225-242, 1990. 9) H. Mayeda, K. Yoshida, and K. Ohashi, •gBase
Para-meters of Dynamic Models for Manipulators with Rotational and Translational Joints•h, Proc. of IEEE Int. Conf. on Robotics and Automations, pp.
1523-1528, 1989.
10) H. Mayeda and K. Ohashi, •gBase Parameters of Dynamic Models for General Open Loop Kinematic Chains•h, Robotics Research/The fifth Int. Symp.
pp.271-278, (1990).
11) J. Y. S. Luh, M. W. Walker, and R. P. C. Paul, •gOn-Line Computational Scheme for mechanical manipu-lators•h, ASME J. of Dyn. Syst. Meas. and Control, Vol.102, pp.69-76, 1980.
12) 前 田浩 一,“ ロボ ッ トア ー ムの 動 的 モ デ ル の 同 定 ”,日 本 ロ ボ ッ ト学 会 誌7巻2号,pp.203-209(1989).
13) W. Kalil and J. F. Kleinfinger, •gA New Geometric Notation for Open and Closed-Loop Robots•h, Proc. IEEE Conf. on Robotics and Automation, pp.
1174-1180, 1986.
14) J. J. Craig, •gIntroduction of Robotics•h, Addison-Wesley, Reading, Mass. 1986.
15) J. M. Hollerbach, •gA Recursive Lagrangian Formu-lation of Manipulator Dynamics and a Comparative Study of Dynamic Formulation Complexity, •hIEEE Trans. Syst. Man and Cybern., SMC-10, pp. 730-736, 1980.
16) C. A. Balafoutis, P. Misrta, and R. V. Patel, •gA Cartesian Tensor Approach for Fast Computation of Manipulator Dynamics,•h in Proc. IEEE Int, on Robotics and Automation, pp. 1348-1353, 1988. 17) W. Khalil and J. F. Kleinfinger, •gMinimum
Oper-ations and Minimum Parameters of the Dynamic Models of Tree Structure Robots,•h IEEE Jour. of
Robotics and Automation, Vol. RA-3, No 6, pp. 517-526. 1987. 《付 録A1》 ベ ク トル と テ ン ソ ル の 公 式 α,b,Cを3×1の 任 意 ベ ク.トル,zoを 第3要 素 が1の 単 位 ベ ク トル,Figを3×1単 位 行 列 とす る と a×(b×c)=(cTaE3-caT)b(A1.1) a×(b×c)+b×(c×a)+cx(axb)=0(A1.2) aT(b×c)=bT(cXa)(A1.3) a×(b×(b×a))=-b×(aaTb)(A1.4) a×(b×(b×c))十C×(b×(b×a)) = b×((acT+1-caT)b)(A1.5) 《付 録A2》 条 件T3に お け る 式(47)の 証 明 式(13)でiをn-1に 置 換 え,式(41)∼(44)を 代 入 す る と 〓こ こで,運 動 の漸 化 式 〓を 代 入 し,付 録A1の 公式(A1.1)∼(A1.5)を 用 い る と 〓を 得 る.た だ し,Jnは 式(48)で 与 え ら れ る.こ こ で, Jnの 要 素Jn,zzを 分 離 し Jn=(Jn-Tn,zzU)十 ノn,zzU 日本 ロ ボ ッ ト学 会 誌11巻1号 109 1993年1月