遠隔環境における演劇自主稽古支援システムの提案
6
0
0
全文
(2) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2018-DPS-173 No.1 2018/1/18. さらに表 2 は,文化庁が演劇団体に対して行った,劇の. 台等の環境とのインタラクションの中で即時に演技. 質の向上のための取り組みに関する調査[1]の結果をまと. を形作っていく経験を長く積むことで,身体への意. めたものである.ここから,多くの演劇団体が演劇の質向. 識を常に持てるようになり,感覚と身体部位の動き. 上のために役者の自主練習を取り入れていることがわかる.. がつながりあった身体知を身につけることができる. 以上のことから,演劇の創作活動において役者の自主稽古. と考えられる.. は非常に重要であると言える. 2.2 演劇の自主稽古. 以上のことから,役者の自主稽古において,共演者との. 役者による自主稽古は,演劇の質を向上させるために非. インタラクションや,第三者的な視点で自分を見つめ,身. 常に重要である.本節では,その自主稽古において重要な. 体の動きや演技を形作っていくことが重要であるというこ. ことについて述べる.安藤らは,演劇経験が 8 年 3 ヶ月~. とがわかる.. 17 年 9 ヶ月の 10 名の役者に対して,演技の熟達化に関す る調査[2]を行った.この結果,多くの被験者が演劇を始め. 3. 関連研究. た当初は自分のことのみを考えていたのに対し,経験を積. 本章では,役者の自主稽古において大切になる,第三者. むにつれて,以下の三つの点を演技において重要視するよ. 的な視点での身体動作の把握の支援の研究や,遠隔での人. うになったことが分かった.. 物同士の身体的なインタラクションの把握を支援する研究. . 共演者とのインタラクション. の具体例を紹介する.また,演技においてどういった要素. 役者は,初心者のうちは演技に臨むにあたり,自分. が重要になるのかということを明らかにするために,演出. のことだけを考えてしまう傾向がある.それゆえ,. 家が役者に対してどういった指導をしているのかを調査し. 自分の台詞のみに集中し,それをいかに言うか,そ. た研究についても紹介する.. の部分でいかに演技をするかを前もって綿密に計画. 3.1 第三者視点による身体動作の把握の支援. . . し,計画通りに演技ができるよう,一人で何度も反. 第三者視点で自身の動きを確認することは,演劇だけで. 復練習をする.しかし経験を積むにつれ,.真にその. なく,ダンスやスポーツなど様々な分野で重要だとされて. 役として演技をするためには,前もった計画通りに. おり,その把握を支援するための研究も盛んに行なわれて. 決められた演技をするのではなく,共演者の演技や. いる.Jacky らは,モーションキャプチャを用いて,ダン. 周囲の環境を察知し,それを受けて,それに適合し. サーの動きをアバタで再現し,任意の視点から自身の動き. た演技をその場でする必要がある.そのため,演劇. を確認できるダンスレッスンシステムを構築した[4].これ. 稽古において共演者とのインタラクションは極めて. は,ダンスの基本的な振り付けを覚えるためのシステムで. 大切なものであると言える.. あり,アバタで提示されたお手本の動きを真似し,その類. 第三者的な視点. 似度からユーザのダンスを点数化し,フィードバックする.. 安藤らによると,役者は,観客からの目を常に意識. モーションキャプチャされたアバタの動きを任意の視点か. することで,劇場の広さなどの環境の変化を感じと. ら見ることで,ビデオ録画したものを見て学習するよりも,. る.そして,それに応じて適切に身体動作を調節す. より効率的にダンスを習得できることがわかった.. ることができるようになるという.また,自身の動. また,Shuo Yan らも同様に,ダンサーの動きを第三者視. 作が他人からどう見えているかを確認するために,. 点で客観視しながら VR 環境で練習できる OutsideMe [5]と. 鏡を練習に用いたり,ビデオで録画することで共演. いうシステムを提案している.このシステムは,HMD を. 者との間合いを確認したりすることがよくある[3].. 装着したユーザが,VR 環境においてリアルタイムに自身. 身体知の獲得. の動きを任意の視点で確認できる.このシステムを,実際. 役者は,演技の際に相手役の演技を受け止め,その. にダンス経験者が練習に使用したところ,普段の練習より. 場でそれに対応した演技を即座におこなっている.. もより効率的にダンスの動きを習得できるということがわ. そのように,演劇では相手の演技に即座に対応する. かった.これら二つのシステムは,モーションキャプチャ. ことのできる状態でいることが重要となり,役者は,. によって身体動作をアバタで再現することで,第三者視点. 演技をおこなう際に,身体動作においてありとあら. からの自分の動きの把握を支援するものであるが,演劇の. ゆる身体の動きを駆使している.つまり,即座の演. ような,複数人が参加する状況の想定がなされておらず,. 技をおこなう際,感覚と身体とが協応した形の身体. あくまで一人の身体動作の把握をすることに特化している. 知を身につけていると考えられる.それを身につけ. ものである.. るためには,前述したような共演者とのインタラク. 3.2 遠隔環境における人物同士の演劇稽古の支援. ションや,観客からの視点を常に意識し,自分を第. William らは,離れた 3 地点を結ぶ演劇稽古サポートシス. 三者的な立場で見ることが重要である.共演者や舞. テム[6]を提案している.このシステムは,二人の役者と一. ⓒ 2018 Information Processing Society of Japan. 2.
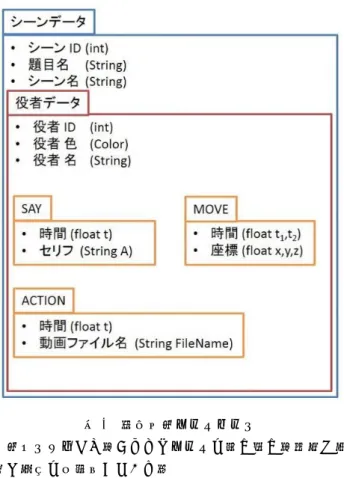
(3) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2018-DPS-173 No.1 2018/1/18. 人の演出家が, A,B,C とそれぞれ離れた 3 地点にいること. とのインタラクションや,第三者的な視点で自分を客観視. を想定し,遠隔で演劇の稽古を成立させようという研究で. し,身体動作や演技を身につけることが大切である.そこ. ある.A 地点では,スクリーンに B 地点にいる役者の等身. で本研究では,遠隔環境での演劇の自主稽古支援システム. 大のアバタを表示し,また球状のディスプレイに特に表情. を提案する.本研究は主に以下の項目を実現する.. だけを切り出して表示している.また,B 地点では,役者. . 遠隔環境での複数人でのインタラクション. は HMD と装着型のモーションキャプチャデバイスを身に. 遠隔地にいる共演者とのインタラクションを VR 環. つけ,A 地点の役者の様子を VR 環境で把握している.ま. 境において実現する.役者は HMD を装着し,相手役. た,C 地点では A,B 両地点の様子を統合的に観察し,演出. 者は等身大のアバタとして表示され,モーションキ. 家としての指示を送ることが可能である.このシステムは,. ャプチャにより,相手の動きが再現される.一方で,. 遠隔地での演劇練習をサポートし,役者同士のインタラク. 自身の動きもモーションキャプチャされ ,相手の. ションを支援する一方で,第三者視点で自身を客観視しな. HMD 上にアバタとして同様に表示されるので,双方. がらの練習を行うことはできない.また,特に演技に必要. 向のインタラクションが可能である.. な台詞などの要素の把握の支援はできず,遠隔地にいる人. . 第三者視点での動きの確認. 物同士での身体動作の確認にとどまっている.. 役者に第三者からの視点として,任意の点から自身. 3.3 演出家による役者への指導内容の調査. の動きを確認できる機能を実現する.これにより, 共演者との間合いや,観客からの目線,自身の動き. 演出家による役者への指導は,主に立ち稽古において行. の確認など,様々なことを把握できる.. われる.後安らは,演出家による役者への指導がどのよう に行われているのかについての調査[7]を行った.この調査. . 演技に必要な要素の把握の支援. から,役者が演技をする上で,次の点が重要であるという. 役者が演技において必要な要素の提示を行うことで,. ことが分かった.. 演技の習得を支援する.なかでも特に,3.3 節で紹介. . したような,演出家からの指導が多い項目について. タイミング 演劇においてタイミングは,非常に重要な要素であり,. の把握の支援を行う.具体的には,台詞や行動のタ. 実際の稽古の場において,演出家から役者へ出される. イミング,身体的な動作,舞台上の位置である.. 指示のうち,このタイミングに関する指示が最も多い.. . 演劇は,映画やドラマなどのカット割りが存在する映. また本システムは,モーションキャプチャデバイスとし. 像作品とは異なり,リアルタイムに観客に伝わるもの. て Microsoft 社の Kinect V2 を,VR 環境の提示デバイスと. であるため,演出家は役者に対し,非常に細かく指導. して HTC 社の Vive を用いる.ユーザは HMD を被り,VR. を行う.. 空間に没入し,演劇稽古を行う.この VR 空間には,遠隔. 舞台上の位置や体の動き. 地にいる共演者がアバタとして表示される.また,自分自. 役者は舞台上で体を使って演技をする.その際に,役. 身が発言する台詞や,その発言タイミング,演技の見本の. 者の舞台上での位置や,身体動作は演技において重要. 動作,第三者からの視点が表示される.これらの情報は,. な要素となり,演出家はこれらの要素について,役者. すべてデータベース上にデータとして格納されている.こ. に対し頻繁に指導を行う.. のデータベースのことを電子台本データベースと呼ぶ.電 子台本データベースに本システムが自動的に問い合わせを. 以上のことから,演劇自主稽古の支援システムを構築す. 行い,その結果を HMD 上に表示していく.次節以降では,. るにあたり,演技をする上で必要な情報として,台詞のほ. これらについてより詳細に説明していく.. かにタイミングや舞台上の位置,そして身体動作について. 4.2 電子台本データベース. 分かりやすく提示する必要があると考える.. 4. 遠隔環境における演劇自主稽古支援システ ムの提案 本章では,遠隔地にいる共演者を VR 空間上にアバタで. 電子台本は,台詞やト書きで構成されている従来の文字 台本とは全く異なるものである.電子台本には,従来の文字 台本に書かれている各役者の台詞以外に,役者が舞台上の どこに立っているのかという位置情報と,役者はどのよう な身体動作をすればいいのかという情報をト書きに代わる. 再現することによって演劇稽古を可能にするシステムを提. 形で付加することにより,舞台空間の状態の把握を可能に. 案する.. する.また,台詞・位置情報・身体動作の情報それぞれに時. 4.1 提案システムの概要. 間情報を付加することで,舞台上で変化していく各行動の. 演劇団体は,練習場所の不足という問題を抱えている. また,俳優による自主稽古は,劇の質を向上させるために. タイミングを把握することが可能になる.図 1 は,電子台本 データベースの内容を示している.. 非常に重要なことである.演劇の稽古においては,共演者. ⓒ 2018 Information Processing Society of Japan. 3.
(4) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2018-DPS-173 No.1 2018/1/18. イミングを表すゲージである.このゲージは,時間の経過 に従い縮み,消えた時がその発言タイミングとなり,台詞 は赤く変化する.その縮む様子を表したものが図 4 である. また,下の行に表示されている台詞は,さらにその次の台 詞である.なお,これらの台詞の内容や,発言のタイミン グは,すべて電子台本データベースに格納されており,シ ステムにより自動的に問い合わせが行われ,反映される. これらの情報は,HTC Vive に付属のコントローラーのボタ ンを押すことで,表示/非表示の切り替えが可能である.. 図3 図1. 台詞の表示. 電子台本データベース. 本システムでは,これらのデータを読み込み,演技に必 要な情報を可視化している. 4.3 提案システムの詳細 4.3.1 VR 空間 本システムでは,HMD として HTC Vive を用いている. Vive を用いる際は,HMD の他に二台のカメラを設置する 必要があり,このカメラによって動き回れる広さが定義さ れる.最大で 3m×4m の広さに対応しており,カメラによ. 図4. タイミングバーの変化. って HMD の位置が特定され,ユーザは VR 空間を歩き回 ることが可能である.本システムにおいて,ユーザが装着 した HMD 上には,図 2 のような VR 空間が表示される. 図 2 では,共演者がアバタとして表示されている.. 4.3.3 身体動作の表示 図 5 は身体動作の見本が表示される様子である.図 5 の 赤い四角で囲った部分がその見本であり,見本はアバタで 表示される.この見本は,その動作をすべきタイミングで 表示されはじめ,役者がその動作を終了するタイミングで 消えるようになっている.これらの見本動画やタイミング の情報は,すべて電子台本データベースに格納されており, システムにより自動的に問い合わせが行われ,反映される.. 図2. システムにより提示される VR 空間. 4.3.2 台詞の表示 図 3 は,HMD 上に表示される台詞を示している.上の 行に表示されている台詞が,役者の次に発言すべき台詞で あり,その上に表示されている青いゲージは,その発言タ. ⓒ 2018 Information Processing Society of Japan. 図5. 身体動作の見本. 4.
(5) 情報処理学会研究報告 IPSJ SIG Technical Report. Vol.2018-DPS-173 No.1 2018/1/18. 4.3.4 舞台上の位置の表示 図 6 は役者が次に移動すべき舞台上での立ち位置を示し ている.役者がその立ち位置に移動が完了すると,自動的 にこのマーカは消える.立ち位置は,すべて電子台本デー タベース上に格納されており,システムが自動的に読み込 みを行い,その結果が HMD 上に反映される.. 図8. ハードウェア構成. 本システムのネットワーク構成を図 9 に示す.図 9 にお いては,2 名の役者が本システムを使用している.各地点 図6. 舞台上の立ち位置を表すマーカ. の PC は,Unity に内蔵されるネットワーク機能を拡張した クライアント向け専用フレームワークである,Photon Unity Network(PUN)を利用して相互に接続されている.この PUN. 4.3.5 第三者視点 図 7 は,第三者の視点を表している.この視点は,任意. を介し,各地点の HMD の VR 空間上の座標や,また,Kinect. に指定することが可能であり,この場合では客席の中央か. を用いて取得した各関節のモーションキャプチャデータの. らの視点に設定している.この第三者視点映像は,HTC. 共有を行っている.各地点では,それらの座標やモーショ. Vive に付属のコントローラーのボタンを押すことで,表示. ンキャプチャデータの情報をもとに,共演者を示すアバタ. /非表示の切り替えが可能である.. の VR 上での位置や身体の動きを再現している.さらに, 電子台本データベースから,演技に必要な情報の取得を行 い,それらを各地点の役者の HMD 上に表示している.PUN は無料で同時に 20 人まで接続することが可能であるため, 本システムは 20 人までの演劇に対応することが可能であ る.. 図7. 第三者視点. 4.4 実装 本システムは,モーションキャプチャデバイスとして, Microsoft 社の Kinect V2 を,VR 空間の提示デバイスとして HTC Vive を用いている.図 8 は,各地点におけるハードウ ェア構成を示している.Vive を用いる際は,HMD の他に 二台のカメラを設置する必要があり,このカメラによって 図9. HMD の位置が特定され,ユーザは VR 空間を歩き回ること が可能である.VR 環境は,Unity を用いて構築し,アプリ ケーションの開発言語は C#である.本システムでは,Kinect を用いて役者の関節座標を取得しているが,この際,HMD を装着する頭からの相対的な位置として各関節の座標を取. ネットワーク構成図. 5. 評価実験の検討 本章では,本システムの評価実験についての検討を行う. 5.1 実験目的. 得している.そうすることで,Vive のカメラから VR 空間. 実験は,複数人の演劇稽古において,本システムによる. 上の HMD の位置(役者の頭の位置)を取得し,その位置. 第三者視点の提示が有効であるかどうかの検証と同時に,. において Kinect から役者の関節の動きを再現することが可. 本システムによる演技に必要な情報の提示の有用性を検証. 能になる.. することが目的である.. ⓒ 2018 Information Processing Society of Japan. 5.
(6) 情報処理学会研究報告 IPSJ SIG Technical Report 5.2 実験内容. Vol.2018-DPS-173 No.1 2018/1/18. テムを提案した.このシステムは,遠隔地にいる共演者を. 実験では,本システムを用いて第三者視点や演技に必要. VR 空間上でアバタを用いて再現し,複数人でのインタラ. な情報を提示しながら行う稽古と,HMD 上に共演者のア. クションを行いながら演劇稽古をすることを可能にする.. バタと台詞のみを提示する稽古の比較を行う.被験者は 2. またそれと同時に,稽古において大切である第三者視点で. グループに分かれ,グループ A は前者の稽古に,グループ. の動きの確認や,演技に必要な要素の把握の支援も行う.. B は後者の稽古に参加する.両グループとも,被験者は各. 本システムによる第三者視点の提示の有効性や,演劇稽古. 回 1 人で,実験者が共演者として参加し,2 人で演劇稽古. が支援できているかの検証を目的に,評価実験を行う予定. を行う.各グループとも,被験者・実験者それぞれが別の. である.この実験では,本システムを用いて第三者視点や. 地点で,2 分程度の演劇の稽古を 2 種類の台本で実行する.. 演技に必要な情報を提示しながら行う稽古と,HMD 上に. この際,評価項目は以下の通りとする.. 共演者のアバタと台詞のみを提示する稽古の比較を行い,. . これらの実験結果の差異をもとに評価を行う.. 立ち位置の精度 舞台上の立ち位置を実験者が指定する.指定の際は, 舞台上の位置を直接示す.実験者が指定した位置にど. . . . . 7. 参考文献. の程度の精度で被験者が立つことができたかを検証. [1] 文化庁, “実演芸術家等に関する人材の育成及び活用に. する.. ついて”, (2009).. 第三者視点の有効性. [2] 安藤英恵, ”長期経験者へのインタビュー調査による. 舞台装置の陰に隠れて客席から見えないようにする. 演劇俳優の熟達過程の考察”, 西南学院大学人間科学論集. といったタスクや,舞台の中央に移動するといったタ. vol.73, 第 10 巻, 2 号, pp. 115-130 (2015).. スクを与え,各グループでどのような差異が見られる. [3] 安藤英恵,京都大学,京都大学大学院教育学研究科紀. かを定量的に評価する.また,共演者との位置を相対. 要第 52 号, ”演劇俳優の熟達化と役・俳優・観客の視点の. 的に指定することで,第三者視点が相対的な位置の把. 役割”, pp. 386-398 (2005).. 握に寄与しているかどうかの検証も行う.. [4] Jacky C.P. Chan, Howard Leung, Jeff K. T. Tang, Taku. 身体的な見本動作の分かりやすさ. Komura, City University of Hong Kong, “A Virtual Reality. 被験者に身体的な動作のタスクを与える.実験者が指. Dance Training System Using Motion Capture Technology”,. 定した通りの動作が行えているかどうかや,見本とな. IEEE TRANSACTIONS ON LEARNING TECHNOLOGIES,. る動作の提示の仕方がわかりやすかったかどうかを. VOL. 4, NO. 2, pp.187-195 (2011).. アンケート調査する.. [5] Shuo Yan, Gangyi Ding, Zheng Guan, Ningxiao Sun,. 発言タイミング. Hongsong Li, Longfei Zhang., Beijing Institute of Technology,. 台詞と台詞の間を実験者で指定する.被験者が発現し. “OutsideMe: Augmenting Dancer's External Self-Image by. たタイミングを計測し,間が適切にとれていたかどう. Using A Mixed Reality System”, CHI EA 2015, pp. 965–970. かを,各グループにおいて秒単位で量的に計測する.. (2015).. ユーザビリティ. [6] William Steptoe, Jean-Marie Normand, Oyewole Oyekoya,. 本システムのユーザビリティに関して,アンケートで. Department of Computer Science, University College London,. 評価する.. “Acting Rehearsal in Collaborative Multimodal Mixed Reality Environments”,. 以上の項目について,グループ間の結果の差異をもとに, 5.1 節に述べたことについて評価を行う.. 6. おわりに. The. MIT. Press. Journals,. Presence:. Teleoperators and Virtual Environments, pp. 406-422 (2012). [7] 後安美紀, 辻田 勝吉, “演劇創作におけるシステムダ イナミクス”, 日本認知科学会, 認知科学 14(4), pp. 509-531 (2007).. 多くの演劇団体は,稽古場所の不足により,十分な稽古 時間の確保ができないという問題を抱えているため,役者 の自主稽古は劇の質を向上させるにあたって非常に重要で ある.また,演劇稽古において,共演者とのインタラクシ ョンや,第三者的な視点で自分を客観視することが大切で あり,役者はそれらを通じて演技を身につけていく.役者 はこれら 2 つの要素を大切にしつつ,特にタイミングや身 体動作,舞台上での位置といった要素を中心に稽古を行う. そこで,我々は,遠隔環境での演劇の自主稽古支援シス. ⓒ 2018 Information Processing Society of Japan. 6.
(7)
図
関連したドキュメント
金沢大学学際科学実験センター アイソトープ総合研究施設 千葉大学大学院医学研究院
東京大学 大学院情報理工学系研究科 数理情報学専攻. [email protected]
鈴木 則宏 慶應義塾大学医学部内科(神経) 教授 祖父江 元 名古屋大学大学院神経内科学 教授 高橋 良輔 京都大学大学院臨床神経学 教授 辻 省次 東京大学大学院神経内科学
講師:首都大学東京 システムデザイン学部 知能機械システムコース 准教授 三好 洋美先生 芝浦工業大学 システム理工学部 生命科学科 助教 中村
(Please note that, because Japanese language proficiency is not required for admission to the Program, the letter of recommendation does not need to be written by a teacher of
【対応者】 :David M Ingram 教授(エディンバラ大学工学部 エネルギーシステム研究所). Alistair G。L。 Borthwick
東京大学大学院 工学系研究科 建築学専攻 教授 赤司泰義 委員 早稲田大学 政治経済学術院 教授 有村俊秀 委員.. 公益財団法人
1978年兵庫県西宮市生まれ。2001年慶應義塾大学総合政策学部卒業、
