マルチ GNSS
基準周波数発生器
型式
GF-8701, GF-8702, GF-8703,
GF-8704, GF-8705
プロトコル仕様書
IMPORTANT NOTICE
本書に記載された内容を発行元(古野電気株式会社)の書面による許可無く複写、複製、転載および第三者へ開示 することを禁止します。
FURUNO ELECTRIC CO., LTD. All rights reserved. 記載の製品、仕様は予告なく変更することがあります。 本製品は GNSS 対応や高感度化対応、各種仕様追加に対応する都合上、やむを得ず、過去製品と、内部処理およ び一部動作が異なる場合がございます。予めご了承ください。仕様に関しましては、本製品向けの仕様書に記載され ている内容を正とし、また仕様書に記載されていない項目につきましては、本製品の実動作を正といたします。 本製品でサポートしているコマンド・センテンスは、本製品用のプロトコル仕様書、または、弊社が提供する本製品用 の技術動作説明書に記載されているもののみです。本製品用の仕様書に記載されていない他製品のコマンドや、使 用者が偶然に発見された内部コマンドを意図的に利用されたことによる動作不良に関しまして、弊社は対応致しかね ますのでご了承ください。 使用者の評価のために、弊社より、本製品用のプロトコル仕様書、または、弊社が提供する本製品用の技術動作説 明書に記載されていない内部コマンドをご連絡する場合がございますが、そのコマンドにつきましては評価のための 利用に留め、量産製品への適応はご遠慮頂きますようお願い申し上げます。 本書に記載されている社名、製品名は、一般に各開発メーカーの登録商標または商標です。 GPS(米国)、GLONASS(ロシア)、QZSS(日本)、SBAS(WAAS(米国)、EGNOS(欧州)、MSAS(日本))はそれぞ れを所持する国が管理・運用するシステムです。それらの運用によっては、測位性能が著しく劣化することがあります。 本仕様書に記載されている事項は、上記の場合を含めて保証したものではありません。これらの利用にあたっては、 本システムの特性を十分理解し、使用者の責任においてその利益を活用することが必要です。
改訂歴
Version 改訂内容 改訂日 0 G15-000-11-001-05 から改訂 2017.02.27 5.4 GSA—例の誤記訂正 6.1.7 GCLK—field 4 を変更7.3.3 CRY (TPS3)—pos mode (field 2)の名称を変更 7.3.4 CRZ (TPS4)—frequency mode の定義を追加 BBRAM センテンスを削除
8 章—表 8.2 にコマンドを追加。Notes (*2), (*5)を追加 11 章—参考資料を変更
目次
1 概要 ··· 1 2 通信仕様 ··· 1 3 シリアルデータ出力タイミング ··· 2 4 NMEAセンテンスフォーマット ··· 3 4.1 標準NMEAセンテンス ··· 3 4.2 専用NMEAセンテンス ··· 4 5 標準NMEA出力 ··· 45.1 GGA – Global Positioning System Fix Data ··· 5
5.2 GLL – Geographic Position - Latitude/Longitude ··· 6
5.3 GNS – GNSS Fix Data ··· 7
5.4 GSA – GNSS DOP and Active Satellites ··· 8
5.5 GSV – GNSS Satellites in View ··· 9
5.6 RMC – Recommended Minimum Navigation Information ··· 10
5.7 VTG – Course Over Ground and Ground Speed ··· 11
5.8 ZDA – Time & Date ··· 11
6 専用NMEA入力 ··· 12
6.1 API – eRide GNSS Core Library Interface ··· 12
6.1.1 ALMSET – アラーム出力設定 ··· 12 6.1.2 ANTSET – アンテナ給電設定 ··· 12 6.1.3 CROUT – CRセンテンスの出力設定 ··· 13 6.1.4 DEFLS – デフォルト閏秒の設定 ··· 13 6.1.5 EXTSYNC – 外部同期設定 ··· 14 6.1.6 FIXMASK – 使用衛星のマスク設定 ··· 15 6.1.7 GCLK – GCLKの出力設定 ··· 16 6.1.8 GNSS – 衛星システムの設定 ··· 17 6.1.9 HOSET – Holdoverに関する設定 ··· 18 6.1.10 MODESET – 状態遷移条件設定 ··· 19 6.1.11 PHASESKIP – 位相飛ばし実施設定··· 20
6.1.12 PPS – PPS(Pulse per Second)出力方法の設定 ··· 20
6.1.13 RESTART – リスタート ··· 22
6.1.14 SURVEY – 位置モードの設定 ··· 23
6.1.15 TIME – 初期時刻の設定 ··· 26
6.1.16 TIMEALIGN – 時刻&PPS同期モードの設定 ··· 27
6.1.17 TIMEZONE – ローカルゾーンタイムの設定 ··· 28
6.2 CFG – Setting of Application Software ··· 29
6.2.1 NMEAOUT – 標準NMEA出力設定 ··· 29 6.2.2 UART1 – シリアルポートの設定 ··· 29 6.3 SYS – PVT System ··· 30 6.3.1 ANTSEL – アンテナ入力端子の設定 ··· 30 6.3.2 VERSION – ソフトウェアバージョンの出力要求 ··· 30 7 専用NMEA出力 ··· 31 7.1 ACK – コマンド受信確認出力 ··· 31
7.2 API – eRide GNSS Core Library Interface ··· 32
7.2.1 EXTSYNC – 外部同期出力 ··· 32
7.3 CR – eRide GNSS Core Library Interface ··· 33
7.4.3 VERSION – Software Version ··· 43
7.5 MSG – Event Driven Message ··· 43
8 受信機がBBRAMにバックアップする項目 ··· 44
9 TRAIM (Time Receiver Autonomous Integrity Monitoring) ··· 46
10 閏秒の確定処理および挿入処理について ··· 47
1
概要
本書はマルチ GNSS 基準周波数発生器 GF-8701, GF-8702, GF-8703, GF-8704, GF-8705(*1)の通信プロトコル について記載します。 Notes: (*1) 本書では総称して GF-870x と記載します。2
通信仕様
通信ポート :TXD, RXD 通信手順 :無手順 通信仕様 :全二重 調歩同期式 通信速度 :38400 bps スタートビット :1 ビット データ長 :8 ビット ストップビット :1 ビット パリティビット :None データ出力間隔 :1 秒信号コード形式 :NMEA-0183 Ver.4.10 データ準拠 ASCII コード(*1)
通信内容 入力データ NMEA Proprietary センテンス 出力データ NMEA 標準センテンス NMEA Proprietary センテンス Notes:
(*1) “NMEA 0183 STANDARD FOR INTERFACING MARINE ELECTRONIC DEVICES Version 4.10” (NATIONAL MARINE ELECTRONICS ASSOCIATION, June, 2012)
3
シリアルデータ出力タイミング
シリアルデータの出力タイミングは、PPS の出力タイミングと同期(*1)(*2)しています。シリアルデータは、PPS が出力 された後、50ms±25ms の範囲で出力が開始されます。
シリアルデータの時刻は、次の PPS の出力タイミング時点の時刻を示しています。
PPS(t-1) PPS(t) PPS(t+1)
Serial data(t) Serial data(t+1)
50ms±25ms 50ms±25ms
Notes:
(*1) frequency mode が Warm Up 中は同期せず、Pull-In 以降でタイミング同期します。(frequency mode について は 7.3.4 項を参照ください。) (*2) シリアルデータと PPS の出力同期を保つためには、シリアルデータの出力が 1 秒以内に出力できる量に収める 必要があります。シリアルデータの出力が多い場合は、シリアルデータの出力を制限するか、より高いボーレート へ変更する必要があります。例えば、ボーレート 4800bps で、出力センテンスを RMC、GNS、VTG、GSA、ZDA、 GSV に設定している場合、ZDA センテンスを出力するまでに 1 秒経過し、GSV センテンスの出力時には 1 秒を 超えてしまいます。この場合、GSV センテンスの出力を停止するか、より高いボーレートに設定してください。
4
NMEA センテンスフォーマット
4.1 標準 NMEA センテンス
Format:
$ <address field> , <data field> ・・・ *<checksum field> <CR> <LF> 5 bytes Field Description $ センテンスの開始を表します。 <address field> 5 バイトの固定長です。 初めの 2 バイトはトーカ ID を表し、GP は GPS、GN は GNSS、GL は GLONASS を表 しています。本仕様書ではワイルドカードを示す"--"で表しており、"--"は受信状態や出力 設定等により上記のいずれかで出力されます。 続く 3 バイトは、センテンスフォーマットでデータの種類を表しています。 <data field> 主に可変長であり、必ずデリミタ","で区切られます。 該当するデータがない場合は、ヌルフィールドで表します。 固定長で表現されているフィールドについて、指定桁数以下の数字の場合は、指定桁に なるまで、前に 0 が入ります。
*<checksum field> "$"の次のデータから"*"の前のデータまでの全てのデータを、8 ビット全てにつき XOR (排他的論理和)をとり、その結果を 2 バイトのアスキーキャラクタに変換します。 全ての出力センテンスはチェックサムが付いて出力されます。
入力センテンスはチェックサムを付ける必要があります。チェックサムの値はセンテンス 入力時にチェックされ、値が正しくない場合は、そのセンテンスは無効となります。 <CR><LF> センテンスの終了を表します。
4.2 専用 NMEA センテンス
Format:
$ P <maker ID> <sentence type> , <data field> ・・・ *<checksum field> <CR> <LF> 3 bytes 3 bytes Field Description $ センテンスの開始を表します。 P 専用センテンス ID。専用センテンスであることを表します。 <maker ID> 3 バイト固定長で表されるメーカー固有のコードです。 GF-870x では eRide を意味する"ERD"になります。 <sentence type> センテンスの種類を表します。 <data field> 主に可変長であり、必ずデリミタ','で区切られます。 データ長はセンテンスの種類によって決められています。
*<checksum field> "$"の次のデータから"*"の前のデータまでの全てのデータを、8 ビット全てにつき XOR (排他的論理和)をとり、その結果を 2 バイトのアスキーキャラ クタに変換します。 全ての出力データはチェックサムが付いて出力されます。 全ての入力センテンスはチェックサムを付ける必要があります。 チェックサムの値はセンテンス入力時にチェックされ、値が正しくない場合は、そのセンテ ンスは無効となります。 <CR><LF> センテンスの終了を表します。
5
標準 NMEA 出力
8 種類の NMEA 標準(*1)出力センテンス(GGA, GLL, GNS, GSA, GSV, RMC, VTG, ZDA)が出力できます。デフ ォルトでは RMC, GNS, GSA, ZDA, GSV と TPS1,TPS2,TPS3,TPS4 が毎秒出力されます。 各センテンスの出力周期はPERDCFG,NMEAOUTコマンドおよびPERDAPI,CROUTコマンドにて変更が可能で す。なお、出力センテンスにて一部、非対応のフィールドが存在します。非対応のフィールドについては、本紙上では n/a と表示しており、出力としてはヌルフィールドとなります。 Notes: (*1) NMEA0183 Ver. 4.10(2012 年 6 月制定)
5.1
GGA – Global Positioning System Fix Data
Format: $--GGA , hhmmss.sss , ddmm.mmmm , a , dddmm.mmmm , a , x , xx , 1 2 3 4 5 6 7 x.x , x.x , M , x.x , M , xxx , xxx *hh <CR> <LF> 8 9 10 11 12 13 14Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻 hh:時, mm:分, ss.sss:秒 2 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度, mm.mmmm:分 3 a N,S "N"(北緯)または"S"(南緯) 4 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度, mm.mmmm:分 5 a E,W "E"(東経)または"W"(西経) 6 x 0 to 2 GNSS 測位状態 0:未測位または無効 1:単独測位 2:ディファレンシャル測位 7 xx 00 to 12 測位使用衛星数(*1) 8 x.x Null, 0.0 to 50.0 HDOP 値 位置未測位の場合は Null 9 x.x - 海抜高度 10 M M 海抜高度の単位[メートル] 11 x.x - ジオイド高 12 M M ジオイド高の単位[メートル] 13 xxx n/a DGPS データの時間 14 xxx n/a DGPS ステーション識別番号 例: $GPGGA,025411.516,3442.8146,N,13520.1090,E,1,11,0.8,24.0,M,36.7,M,,*66 UTC 時刻:02:54:11.516 北緯 34 度 42.8146 分 東経 135 度 20.1090 分 測位状態:単独測位 使用衛星数:11 衛星 HDOP 値:0.8 海抜高度:24.0 m ジオイド高:36.7 m Notes: (*1) 測位使用衛星数は、GPS, SBAS, QZSS の使用衛星の合計です。 上限値は 12 衛星です。GLONASS の使用 衛星数はこの項目に含まれません。
5.2
GLL – Geographic Position - Latitude/Longitude
Format:
$--GLL , ddmm.mmmm , a , dddmm.mmmm , a , hhmmss.sss , a , a *hh <CR> <LF> 1 2 3 4 5 6 7
Field Data type Range Description
1 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度, mm.mmmm:分 2 a N,S "N"(北緯)または"S"(南緯) 3 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度, mm.mmmm:分 4 a E,W "E"(東経)または"W"(西経) 5 hhmmss.sss 000000.000 to 235959.999 UTC 時刻 hh:時, mm:分, ss.sss:秒 6 a A,V 測位状態 A:データ有効 V:データ無効 7 a A,D,N 測位モード表示 A:単独測位 D:ディファレンシャル測位 N:データ無効 例: $GPGLL,3442.8146,N,13520.1090,E,025411.516,A,A*5F 北緯 34 度 42.8146 分 東経 135 度 20.1090 分 UTC:02:54:11.516 測位状態:データ有効 測位モード:単独測位
5.3
GNS – GNSS Fix Data
Format: $--GNS , hhmmss.sss , ddmm.mmmm , a , dddmm.mmmm , a , c-c , xx , 1 2 3 4 5 6 7 x.x , x.x , x.x , x , x , x *hh <CR> <LF> 8 9 10 11 12 13Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻 hh:時, mm:分, ss.sss:秒 2 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度, mm.mmmm:分 3 a N,S "N"(北緯)または"S"(南緯) 4 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度, mm.mmmm:分 5 a E,W "E"(東経)または"W"(西経) 6 c-c A,D,N 各衛星システムの測位状態 (左から GPS, GLONASS, Galileo) A:単独測位 D:ディファレンシャル測位 N:データ無効 7 xx 00 to 32 測位使用衛星数 8 x.x Null, 0.0 to 50.0 HDOP 値 位置未測位の場合は Null 9 x.x - 海抜高度 [m] 10 x.x - ジオイド高 [m] 11 x n/a DGPS データの時間 12 x n/a DGPS ステーション識別番号 13 x V ナビゲーション状態 V:無効 例: $GNGNS,004457.000,3442.8266,N,13520.1235,E,DDN,22,0.5,40.6,36.7,,,V*60 UTC:00:44:57.000 北緯 34 度 42.8266 分 東経 135 度 20.1235 分 測位状態:GPS:ディファレンシャル測位, GLONASS:ディファレンシャル測位, Galileo:データ無効 測位使用衛星数:22 衛星 HDOP 値:0.5 高度:40.6 m ジオイド高:36.7 m ナビゲーション状態:無効
5.4
GSA – GNSS DOP and Active Satellites
Format:
$--GSA , a , a , xx , xx , xx , ・・・ , xx , x.x , x.x , x.x , h *hh <CR> <LF> 1 2 3 4 5 6-13 14 15 16 17 18
Field Data type Range Description
1 a M,A 動作モード M:2D/3D 固定モード A:2D/3D 自動切替えモード 2 a 1,2,3 測位モード 1:未測位 2:2D 測位 3:3D 測位 3-14 xx Null, 01 to 99 測位使用衛星番号 使用衛星がない場合は Null 15 x.x Null, 0.0 to 50.0 PDOP 値 3D 測位していない場合は Null 16 x.x 0.0 to 50.0 Null, HDOP 値 測位していない場合は Null 17 x.x 0.0 to 50.0 Null, VDOP 値 3D 測位していない場合は Null 18 h 1,2 GNSS システム ID 1:GPS, SBAS, QZSS 2:GLONASS 例: $GNGSA,A,3,09,15,26,05,24,21,08,02,29,28,18,10,0.8,0.5,0.5,1*33 $GNGSA,A,3,79,69,68,84,85,80,70,83,,,,,0.8,0.5,0.5,2*30 2D/3D 自動切替えモード 測位モード:3D 測位 使用衛星番号:09, 15, 26, 05, 24, 21, 08, 02, 29, 28, 18, 10, 79, 69, 68, 84, 85, 80, 70, 83 PDOP 値:0.8 HDOP 値:0.5 VDOP 値:0.5
Notes:
- 12 衛星よりも多くの衛星を GSA センテンスで表示する場合は、下記コマンドを発行してください。 “$PERDAPI,EXTENDGSA,num*hh<CR><LF>”
num:表示する衛星数(範囲:12~16、デフォルト:12)
12 衛星より多くの使用衛星を GSA センテンスで表示した場合、PDOP 値、HDOP 値、VDOP 値を示すフィール ドは後ろのフィールドにシフトします。
- 衛星番号は以下の通り表示します。 衛星番号 01~32:GPS 衛星(1~32) 衛星番号 33~51:SBAS 衛星(120~138)
衛星番号 65~92:GLONASS 衛星(slot 01~slot 28) 衛星番号 93~99:QZSS 衛星(193~199)
5.5
GSV – GNSS Satellites in View
Format: $--GSV , x , x , xx , xx , xx , xxx , xx , xx , xx , xxx , xx , 1 2 3 4 5 6 7 8 9 10 11 xx , xx , xxx , xx , xx , xx , xxx , xx , h *hh <CR> <LF> 12 13 14 15 16 17 18 19 20Field Data type Range Description
1 x 1 to 4 メッセージの総数 2 x 1 to 4 メッセージの番号 3 xx 00 to 16 視野内衛星数 4 xx 01 to 99 1 個目の衛星番号 5 xx 00 to 90 1 個目の衛星の仰角 [度] 6 xxx 000 to 359 1 個目の衛星の方位角 [度] 7 xx 00 to 99 1 個目の衛星の SNR [dB-Hz] 8-11 - - 2 個目の衛星の情報 12-15 - - 3 個目の衛星の情報 16-19 - - 4 個目の衛星の情報 20 h 1 Signal ID Example: $GPGSV,4,1,14,15,67,319,52,09,63,068,53,26,45,039,50,05,44,104,49,1*6E $GPGSV,4,2,14,24,42,196,47,21,34,302,46,18,12,305,43,28,11,067,41,1*68 $GPGSV,4,3,14,08,07,035,38,29,04,237,39,02,02,161,40,50,47,163,44,1*67 $GPGSV,4,4,14,42,48,171,44,93,65,191,48,,,,,,,,,1*60 $GLGSV,3,1,09,79,66,099,50,69,55,019,53,80,33,176,46,68,28,088,45,1*76 $GLGSV,3,2,09,70,25,315,46,78,24,031,42,85,18,293,44,84,16,246,41,1*7A $GLGSV,3,3,09,86,02,338,,,,,,,,,,,,,,1*45 <checksum><CR><LF>は最後の衛星データの直後になります。 Notes: - GSV センテンスは 1 つのメッセージで 4 つの衛星の情報を出力します。5 衛星以上の衛星情報は、2 番目以降 のメッセージに出力されます。衛星情報の中に確定していない項目がある場合、その項目はヌルフィールドとな ります。メッセージ内の衛星の情報が 4 衛星に満たない場合、<チェックサム><CR><LF>は最後の衛星データ の直後になります。 - 衛星番号は以下の通り表示します。 衛星番号 01~32:GPS 衛星(1~32) 衛星番号 33~51:SBAS 衛星(120~138)
衛星番号 65~92:GLONASS 衛星(slot 01~slot 28) 衛星番号 93~99:QZSS 衛星(193~199)
メッセージの番号 メッセージの総数
5.6
RMC – Recommended Minimum Navigation Information
Format: $--RMC , hhmmss.sss , a , ddmm.mmmm , a , dddmm.mmmm , a , x.xx , 1 2 3 4 5 6 7 x.xx , ddmmyy , x.x , a , a , a *hh <CR> <LF> 8 9 10 11 12 13Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻 hh:時, mm:分, ss.sss:秒 2 a A,V 測位ステータス A:データ有効 V:データ無効 3 ddmm.mmmm 0000.0000 to 9000.0000 緯度 dd:度, mm.mmmm:分 4 a N,S "N"(北緯)または"S"(南緯) 5 dddmm.mmmm 00000.0000 to 18000.0000 経度 ddd:度, mm.mmmm:分 6 a E,W "E"(東経)または"W"(西経) 7 x.xx - 速度 [ノット] 8 x.xx 0.00 to 359.99 真方位 [度] 9 ddmmyy dd: 01 to 31 mm: 01 to 12 yy: 00 to 99 年月日 dd:日, mm:月, yy:年の下二桁 10 x.x n/a 磁気偏差 11 a n/a 磁気偏差の補正方向 12 a A,D,N 測位モード A:単独測位 D:ディファレンシャル測位 N:データ無効 13 a V ナビゲーション状態 V:無効 例: $GNRMC,012344.000,A,3442.8266,N,13520.1233,E,0.00,0.00,191132,,,D,V*0B UTC 時刻:01:23:44.000 ディファレンシャル測位 北緯 34 度 42.8266 分 東経 135 度 20.1233 分 速度:0.0 ノット 真方位:0.0 度 UTC 年月日:2032 年 11 月 19 日
5.7
VTG – Course Over Ground and Ground Speed
Format:
$--VTG , x.x , T , x.x , M , x.xx , N , x.xx , K , a *hh <CR> <LF>
1 2 3 4 5 6 7 8 9
Field Data type Range Description
1 x.x 0.00 to 359.99 真方位 [度] 2 T T "T"固定 3 x.x - 磁気方位 [度] 4 M M "M"固定 5 x.xx - 速度 [ノット] 6 N N "N"固定 7 x.xx - 速度 [km/h] 8 K K "K"固定 9 a A,D,N 測位モード A:単独測位 D:ディファレンシャル測位 N:データ無効 例: $GNVTG,0.00,T,,M,0.00,N,0.00,K,D*26 真方位:0.00 度 速度:0.00 ノット, 0.00 km/h 測位モード:ディファレンシャル測位
5.8 ZDA – Time & Date
Format:
$--ZDA , hhmmss.sss , xx , xx , xxxx , xxx , xx *hh <CR> <LF>
1 2 3 4 5 6
Field Data type Range Description
1 hhmmss.sss 000000.000 to 235959.999 UTC 時刻 hh:時, mm:分, ss.sss:秒 2 xx 01 to 31 UTC 日 3 xx 01 to 12 UTC 月 4 xxxx 1999 to 2099 UTC 年 5 xxx (+/-) 00 to 23 ローカルゾーンタイム[時] 6 xx 00 to 59 ローカルゾーンタイム[分] 例: $GPZDA,014811.000,13,09,2013,+00,00*7B UTC 時刻:01:48:11.000 2013 年 9 月 13 日
6
専用 NMEA 入力
本製品専用の入力コマンドです。6.1 API – eRide GNSS Core Library Interface
6.1.1 ALMSET – アラーム出力設定
Format:
$PERDAPI , ALMSET , alm OR , alm AND *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 ALMSET - - コマンド名
2 alm OR 0x00 to 0xFF 0x00 CRZ(TPS4)の alarm フィールドに、このフィールドとの論理 和(OR)を出力します(*1)
3 alm AND 0x00 to 0xFF 0xFF CRZ(TPS4)の alarm フィールドに、このフィールドとの論理 積(AND)を出力します(*1) (*1) 論理和(OR)→論理積(AND)の順に計算します。 例: $PERDAPI,ALMSET,0x80,0x80*75 CRZ(TPS4)の alarm フィールドに 0x80 を出力し、他のビットは出力しない。(擬似 alarm) $PERDAPI,ALMSET,0x00,0xFC*70
CRZ(TPS4)の alarm フィールドのアンテナ電流異常(0x01:OPEN と 0x02:SHORT)を出力しない。(!0xFC= 0x03 ビットをマスクします。)(alarm マスク)
Notes:
- この設定は、CRZ(TPS4)の alarm フィールドに擬似的に alarm を出力する場合や、alarm をマスクする場合に有 用です。
- 現在の設定状態を確認する場合は、以下のコマンドを発行してください。 $PERDAPI,ALMSET,QUERY*13.
6.1.2 ANTSET – アンテナ給電設定
Format:
$PERDAPI , ANTSET , antenna status *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 ANTSET - - コマンド名 2 antenna status 0,1 (1 byte) 1 アンテナステータス 0:OFF(アンテナ端子へ給電しない) 1:ON(アンテナ端子へ給電する)
6.1.3 CROUT – CR センテンスの出力設定
Format:
$PERDAPI , CROUT , type , rate *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 CROUT - - コマンド名
2 type W,X,Y,Z W,X,Y,Z 出力する CR センテンス 3 rate 0 to 255 1 1~255:出力更新間隔 [秒] 0:出力停止 例: $PERDAPI,CROUT,W,1*4E CRW(TPS1)センテンスを毎秒出力する $PERDAPI,CROUT,XZ,3*19 CRX(TPS2)センテンスと CRZ(TPS4)センテンスを 3 秒毎に出力する $PERDAPI,CROUT,W,0*4F CRW(TPS1)の出力を停止する 6.1.4 DEFLS – デフォルト閏秒の設定 Format:
$PERDAPI , DEFLS , sec [, mode ] *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 DEFLS - - コマンド名 2 sec 0 to 32 17 デフォルト閏秒 3 mode AUTO FIXED AUTO デフォルト閏秒の更新可否 AUTO:閏秒を取得した場合に自動更新 FIXED:本コマンドで設定した値を保持 例: $PERDAPI,DEFLS,16,AUTO*27 デフォルト閏秒:16 秒 デフォルト閏秒は自動更新 Notes: - この値は、閏秒が別の要因により確定する前のみ使用されます。 - 第 3 フィールド以降は省略可能です。
- mode を AUTO にしている場合、GPS から UTC パラメータを取得、または、GPS と GLONASS を測位した時点 で、デフォルトの閏秒が更新されます。
6.1.5 EXTSYNC – 外部同期設定
Format:
$PERDAPI , EXTSYNC , mode , delay set *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 EXTSYNC - - コマンド名 2 mode 0 to 4 0 外部同期モード 0:OFF モード 1:ON モード① 2:ON モード② 3:自動切り替えモード① 4:自動切り替えモード② 3 delay set -999999 to +999999 0 EPPS タイミング遅延時間 [nsec] EPPS に対する位相差を設定します。mode が ON モード① と自動切り替えモード①のみ有効です。これ以外は 0 を設定 してください。 例: $PERDAPI,EXTSYNC,1,100*3A Notes: - モードを切り替える場合、一度 OFF モードにする必要があります。 - EXTSYNC 機能とは、GNSS 測位から生成する PPS の代わりに、外部入力した PPS(EPPS)を使用する機能で す。各 mode について下表に示します。
mode EXTSYNC 機能 EPPS タイミング遅延時間
0:OFF モード 使用しない 無効 1:ON モード① 常時(*1) コマンドで設定 (*3) 2:ON モード② 常時(*1) GNSS 自動計算(*4)(*5) 3:自動切り替えモード① GNSS 中断時のみ(*2) コマンドで設定(*3) 4:自動切り替えモード② GNSS 中断時のみ(*2) GNSS 自動計算(*4)(*6) (*1) 常に EPPS を使用します。 (*2) GNSS 中断時のみ EPPS を使用します。GNSS 測位時は測位から生成する PPS を使用します。GNSS 中断後、 再度測位 PPS を使用するには 60 秒の GNSS 連続測位が必要です。 (*3) EPPS タイミング遅延時間をコマンドから設定できます。 (*4) EPPS タイミング遅延時間を GNSS 測位から生成する PPS から自動的に計算します。計算値はEXTSYNCの 出力センテンスで確認できます。
(*5) EPPS タイミング遅延時間はコマンド入力時に自動的に計算します。ただし遅延量計算時に Fine Lock でない場 合は 0 になります。
(*6) EPPS タイミング遅延時間は GNSS 中断時に自動的に計算します。ただし遅延量計算時に Fine Lock でない場 合、初回計算時は 0、2 回目以降は前回の値と同じになります。
- 現在の設定状態を確認する場合は、以下のコマンドを発行してください。 $PERDAPI,EXTSYNC,QUERY*5F.
6.1.6 FIXMASK – 使用衛星のマスク設定
Format:
$PERDAPI , FIXMASK , mode , elevmask , Reserve1 , snrmask , Reserve2 [,
1 2 3 4 5 6 Prohibit SVs (GPS) , Prohibit SVs (GLONASS) , Prohibit SVs (Galileo) , Prohibit SVs (QZSS) , Prohibit SVs (SBAS) ] *hh <CR> <LF> 7 8 9 10 11
Field Data type Range Default Description
1 FIXMASK - - コマンド名
2 mode USER - USER 固定
3 elevmask 0 to 90 0 マスク仰角閾値 [度] 閾値より高い仰角にある衛星を測位に使用します。 4 Reserve1 0 0 予約項目(0 固定) 5 snrmask 0 to 99 0 マスク信号レベル閾値 [dB-Hz] 閾値より高い信号レベルの衛星を測位に使用します。 6 Reserve2 0 0 予約項目(0 固定) 7 Prohibit SVs (GPS) 32BIT (HEX) 0 測位使用禁止 GPS 衛星番号 各 BIT が 1 つの衛星に対応します。最下位 BIT が衛星番号 1、 最上位 BIT が衛星番号 32 に対応しています。 8 Prohibit SVs (GLONASS) 24BIT (HEX) 0 測位使用禁止 GLONASS 衛星番号 各 BIT が 1 つの衛星に対応します。最下位 BIT が衛星番号 65、最上位 BIT が衛星番号 88 に対応しています。 9 Prohibit SVs (Galileo) 20BIT (HEX) 0 測位使用禁止 Galileo 衛星番号 各 BIT が 1 つの衛星に対応します。(未実装) 10 Prohibit SVs (QZSS) 7BIT (HEX) 0 測位使用禁止 QZSS 衛星番号 各 BIT が 1 つの衛星に対応します。最下位 BIT が衛星番号 93、最上位 BIT が衛星番号 99 に対応しています。 11 Prohibit SVs (SBAS) 19BIT (HEX) 0 測位使用禁止 SBAS 衛星番号 各 BIT が 1 つの衛星に対応します。最下位 BIT が衛星番号 33、最上位 BIT が衛星番号 51 に対応しています。 例: $PERDAPI,FIXMASK,USER,10,0,37,0,0x92,0x01,0x00,0x00,0x20000*50 マスク仰角:10 度 マスク信号レベル:37 dB-Hz
マスク GPS 衛星:GPS (BIT2 = SVID 2), GPS (BIT5 = SVID 5) and GPS (BIT8 = SVID 8)
マスク GLONASS 衛星:GLONASS (BIT1 = SVID 65) マスク SBAS 衛星:SBAS (BIT18 = SVID 50)
Notes:
- このコマンドでの設定は初期捕捉だけでなく、全ての測位で適用されます。 - 第 7 フィールド以降は省略可能です。
- 使用衛星のマスク設定状態を確認する場合は、以下のコマンドを発行してください。 $PERDAPI,FIXMASK,QUERY*52.
6.1.7 GCLK – GCLK の出力設定
Format:
$PERDAPI , GCLK , mode , rate [, reserve , reserve ] *hh <CR> <LF>
1 2 3 4 5
Field Data type Range Default Description
1 GCLK - - コマンド名 2 mode 0,1 (1 byte) 0 GCLK 出力状態 0:出力しない 1:出力する 3 rate 00004000 to 40000000 (8 byte) 10000000 GCLK 出力周波数 [Hz] 4 reserve 50 (2 byte) 50 50 固定 5 reserve 00 (2 byte) 00 00 固定 例: $PERDAPI,GCLK,1,10000000,50,00*41 GCLK 出力:出力する GCLK 出力周波数:10MHz Notes: - GCLK とは、GCLK 端子から出力するクロック信号です。VCLK と GCLK について以下に説明します。
Clock type Description
VCLK
搭載している VCO(Voltage Controlled Oscillator)からのクロック出力です。GNSS 測位結果を利 用することで、正確な周波数を出力します。PPS 出力とコヒーレントです。出力周波数は固定値 (10MHz)です。
GCLK
VCLK とは別に、NCO(Numerical Controlled Oscillator)で生成したクロック出力です。GNSS 測 位結果を利用することで、正確な周波数を出力しますが、ジッタが存在します。PPS 出力とはコヒー レントではありません。出力周波数を変更できます。 - 第 4 フィールド以降は省略可能です。 - 現在の設定を確認する場合は、下記コマンドを発行してください。結果は入力コマンドと同じフォーマットで出力さ れます。 $PERDAPI,GCLK,QUERY*12 ▲0 ▲0
6.1.8 GNSS – 衛星システムの設定
Format:
$PERDAPI , GNSS , talkerID , gps , glonass , galileo , qzss , sbas *hh <CR> <LF>
1 2 3 4 5 6 7
Field Data type Range Default Description
1 GNSS - - コマンド名 2 talkerID AUTO GN LEGACYGP AUTO AUTO:GLONASS の測位衛星がない場合に、GLGSV を 省略します。GPS, SBAS, QZSS の測位衛星がない場合 に、GPGSV を省略します。 GN:GLONASS の測位衛星がない場合でも、GLGSV を 省略しません。GPS, SBAS, QZSS の測位衛星がない場 合でも、GPGSV を省略しません。 LEGACYGP:GL および GN の talkerID のセンテンスを省 略し、talkerID を GP に統一します。 3 gps 0,2 2 GPS の設定 4 glonass 0,2 2 GLONASS の設定 5 galileo 0 0 Galileo の設定(未実装) 6 qzss 0,2 2 QZSS の設定 7 sbas 0,1,2 1 SBAS の設定 例: $PERDAPI,GNSS,AUTO,2,2,0,2,2*41
測位に使用:GPS, GLONASS, QZSS, SBAS 測位に使用しない:Galileo
Notes: - このコマンドは使用する衛星システムを設定します。Field 3 から 7 の設定内容は次の通りです。 0:測位に使用しない。 1:追尾と航法メッセージのデコードのみを行う。(測位に使用しない) 2:測位に使用する。 - 現在の衛星システムの設定を確認する場合は、下記コマンドを発行してください。結果は入力コマンドと同じフォ ーマットで出力されます。 $PERDAPI,GNSS,QUERY*18 - GF-870x では、SBAS のデフォルト設定は 1 になっており、測位に使用しません。これは SBAS を測位に使用す ると、PPS の精度が劣化する傾向にあるためです。このため、デフォルト設定では、ディファレンシャル測位は行 いますが、SBAS 衛星は GSA センテンスに表示されません。 - "SBAS のみ使用"設定と、"全衛星を測位に使用しない"設定は受け付けません。 $PERDAPI,GNSS,AUTO,0,0,0,0,2*43 $PERDAPI,GNSS,AUTO,0,0,0,0,1*40 $PERDAPI,GNSS,AUTO,0,0,0,0,0*41 - 本コマンド入力時、GLONASS 単独測位設定に変更した場合、または、GLONASS 単独測位設定から別の設定 に変更する場合に、COLD リスタート(時刻もリセット)が行われます。それ以外の設定の場合は HOT リスタート
- GPS+GLONASS の組み合わせを選択した場合、まず GPS で時刻が確定してから GLONASS の測位に移行し ます。したがって、GPS 衛星が測位に必要な数だけ追尾できない場合、GLONASS 衛星の追尾に移行できない 場合があります。 - GLONASS+QZSS の場合は、まず QZSS 単独で時刻が確定してから GLONASS で測位します。また、QZSS 単独で時刻を確定させるためには、位置固定モードである必要があります。したがって、位置固定モードでない 場合、あるいは、QZSS が測位できない環境では、GLONASS+QZSS の設定を行うと、GLONASS が測位でき なくなる場合があります。 6.1.9 HOSET – Holdover に関する設定 Format:
$PERDAPI , HOSET , ho set flag [, learning time set0 , available time set0 [,
1 2 3 4
learning time set1 , available time set1 [, learning time set2 , available time set2]]] *hh <CR> <LF>
5 6 7 8
Field Data type Range Default Description
1 HOSET - - コマンド名
2 ho set flag 0,1 0
設定フラグ 0:デフォルト 1:手動設定 3 learning time set0 0 to 9999999 259200 [秒]
(259200 [秒] = 72 [時間]) 4 available time set0 0 to 999999 86400 [秒]
(86400 [秒] = 24 [時間]) 5 learning time set1 0 to learning time set0 0 [秒]
6 available time set1 0 to available time set0 0 [秒] 7 learning time set2 0 to learning time set1 0 [秒] 8 available time set2 0 to available time set1 0 [秒] 例: $PERDAPI,HOSET,0*2E $PERDAPI,HOSET,1,259200,86400,0,0,0,0*19 $PERDAPI,HOSET,1,259200,86400,172800,57600*21 $PERDAPI,HOSET,1,259200,86400,172800,57600,86400,28800*29 Notes: - 第 3 フィールド以降、または第 5 フィールド以降、または第 7 フィールド以降は省略可能です。 - 省略したフィールドには 0 が設定されます。 - ho set flag に 0 を設定すると、第 3 フィールド以降はデフォルト値が設定されます。(第 3 フィールド以降を設定し ても無視します。)
6.1.10 MODESET – 状態遷移条件設定
Format:
$PERDAPI , MODESET , Lock port set [, Coarse lock PPS timing ,
1 2 3
phase skip PPS timing [, reserve ]] *hh <CR> <LF>
4 5
Field Data type Range Default Description
1 MODESET - - コマンド名
2 Lock port set 0 to 5 1
LOCK 端子を「Lock(Logic H)」にする条件 0:frequency mode が 2, 3, 4 のとき 1:frequency mode が 2, 3 のとき 2:frequency mode が 3 のとき 3:frequency mode が 3, 4 のとき 4:常に Logic L にする 5:常に Logic H にする 3 Coarse lock PPS timing 0 to 999999 GF-8701: 50000 GF-8702: 50000 GF-8703: 10000 GF-8704: 5000 GF-8705: 1500
frequency mode が Pull-In から Coarse Lock へ遷移するための PPS タイミング確度の条件 [nsec] GF-8701: <± 50 usec GF-8702: <± 50 usec GF-8703: <± 10 usec GF-8704: <± 5 usec GF-8705: <± 1.5 usec 4 phase skip PPS timing 0 to 999999 0 位相飛ばし実施フラグが自動判定のときの PPS timing error の判定閾値 [nsec]
0:frequency mode が Pull-In で必ず位相飛ばし を実施 999999:位相飛ばしを実施しない 5 reserve 50 50 50 以外は設定しないこと Notes: - 第 3 フィールド以降は省略可能です。 - 現在の設定状態を確認する場合は、以下のコマンドを発行してください。 $PERDAPI,MODESET,QUERY*50. - frequency mode や「位相飛ばし」については、CRZ(TPS4)センテンスを参照ください。 - 本コマンドの詳細は GF-870x シリーズユーザーガイド(SE17-900-004)を参照ください。
6.1.11 PHASESKIP – 位相飛ばし実施設定
Format:
$PERDAPI , PHASESKIP , phase skip flag *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 PHASESKIP - - コマンド設定
2 phase skip flag 1
(1 byte) 1
位相飛ばし実施フラグ 1:実施
Notes:
- Default は「1(実施)」です。frequency mode が Pull-In に遷移した際に位相飛ばしを実施し、「0(自動判定)」に 自動遷移します。
- frequency mode や「位相飛ばし」については、CRZ(TPS4)センテンスを参照ください。 - 本コマンドの詳細は GF-870x シリーズユーザーガイド(SE17-900-004)を参照ください。
6.1.12 PPS – PPS(Pulse per Second)出力方法の設定
Format:
$PERDAPI , PPS , type , mode , period , pulse width , cable delay ,
1 2 3 4 5 6
polarity *hh <CR> <LF> 7
Field Data type Range Default Description
1 PPS - - コマンド名 2 type VCLK VCLK VCLK 固定 3 mode 0 to 3 1 PPS 出力モード 0:常時停止 1:常時出力 2:1 衛星以上測位中のみ出力 3:TRAIM 正常時に出力 4 period 0 0 PPS 出力間隔 0:1PPS(1 秒毎にパルスが出力) 5 pulse width 1 to 500 500 パルス幅 [msec]
6 cable delay -100000 to 100000 0 ケーブルディレイ [nsec] 7 polarity 0 to 1 0
PPS の同期エッジ 0:立ち上がり 1:立ち下がり
Notes: - PPS 出力モードの詳細は、以下の表を参照ください。 PPS 出力モード Description Mode 0 (常時停止) PPS 出力を停止します。 Mode 1 (常時出力) PPS を常時出力します。 未測位時は RTC に同期した PPS を出力し、測位時は衛星から得られる時刻情 報をもとに GPS、UTC (USNO)、UTC (SU)等に適切に同期した PPS が出力さ れます。(*1) タイミング用 GNSS 受信機から出力されるシリアルデータの情報をもとに、利用 者側で PPS の信頼性と使用の可否を判断される場合に、本モードが適していま す。 Mode 2 (1 衛星以上測位中のみ出力) 1 衛星以上を追尾している場合に PPS を出力します。(*2) 信頼性の高い PPS を取得したい場合に適しています。 Mode 3 (TRAIM 正常時に出力) TRAIM 正常時の場合のみ PPS を出力します。(*3) PPS 出力判定基準が厳しいため、Mode2 より信頼性の高い PPS を取得したい 場合に適しています。 (*1) どの時刻情報に対して同期するかをTIMEALIGNコマンドで選択可能です。
(*2) 位置モード TO mode で、SBAS を除いた 1 つ以上の衛星を追尾している場合です。位置モード NAV mode の 場合は、SBAS を除いた 4 つ以上の衛星を追尾している場合です。
(*3) TRAIM の判定結果は、TPS3センテンスの”TRAIM solution”フィールドに出力しています。TRAIM については、 9 章を参照ください。
- ケーブルディレイは、アンテナエレメントと GF-870x のアンテナ入力端子間のケーブル長(アンテナケーブル長) による時間遅延のことです。適切なケーブルディレイ値を設定することで、GF-870x が出力する PPS の確度をよ り正確にすることができます。
- PPS 出力同期モードは、TIMEALIGNコマンドで変更できます(GPS, UTC(USNO), UTC(SU))。同期モードの デフォルトは UTC(USNO)です。詳細はTIMEALIGNコマンドを参照ください。 - PPS 出力同期状態は、PPS mode、alignment、および測位状態によって、以下の通り変化します。 [1] GPS 同期 PPS mode 測位前 測位後 0 出力停止 出力停止 1 RTC 同期 GPS 同期 2 to 3 出力停止 GPS 同期 [2] UTC(USNO)同期(デフォルト) PPS mode 測位前 測位後 GPS 衛星から UTC(USNO) パラメータ取得後 0 出力停止 出力停止 出力停止 1 RTC 同期 GPS 同期 UTC(USNO)同期 2 to 3 出力停止 GPS 同期 UTC(USNO)同期 [3] UTC(SU)同期 PPS mode 測位前 測位後 GPS 衛星から UTC(SU) パラメータ取得後
6.1.13 RESTART – リスタート
Format:
$PERDAPI , RESTART , restart mode *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 RESTART - - コマンド名 2 restart mode HOT WARM COLD FACTORY - リスタートモード 例: $PERDAPI,RESTART,COLD*08 COLD リスタートします Notes: - バックアップ項目については、”8 受信機が BBRAM にバックアップする項目”の章を参照ください。
6.1.14 SURVEY – 位置モードの設定
Format:
$PERDAPI , SURVEY , position mode [, sigma threshold , time threshold
1 2 3 4
, latitude , longitude , altitude ] *hh <CR> <LF>
5 6 7
Field Data type Range Default Description
1 SURVEY - - コマンド名 2 position mode 0 to 3 1 位置モード 0:移動体測位 NAV (navigation) モード 1:固定位置推定 SS (self survey) モード 2:固定位置推定
CSS (continual self survey) モード 3:位置固定 TO (time only) モード 3 sigma threshold 0 to 255 0 TO モードに自動で遷移するための推定位置σ の閾値 [m] (0 に設定した場合は、使用しません) 4 time threshold 0 to 10080 0 TO モードに自動で遷移するための位置推定更新時間の閾 値 [分] (0 に設定した場合は、使用しません) 5 latitude -90 to 90 0 TO モードでの固定位置の緯度 [度] 正数は北緯、負数は南緯を表します。 この欄の設定は TO モードの場合のみ有効です。 6 longitude -180 to 180 0 TO モードでの固定位置の経度 [度] 正数は東経、負数は西経を表します。 この欄の設定は TO モードの場合のみ有効です。 7 altitude -1000 to 18000 0 TO モードでの固定位置の海抜高度 [m] この欄の設定は TO モードの場合のみ有効です。 例: $PERDAPI,SURVEY,1,10,1440*74 位置モード:SS モード 推定位置σ 閾値:10 m 位置推定更新時間閾値:1440 分 $PERDAPI,SURVEY,3,0,0,37.78700,-122.45100,31.5*53 位置モード:TO モード 推定位置σ 閾値:0 m 位置推定更新時間閾値:0 分 固定位置:北緯 37.78700 度 西経 122.45100 度 高度:31.5 m Notes: - 第 3 フィールド以降は省略可能です。
- 各位置モードについての詳細は、以下の表を参照ください。 位置モード(*1) Description 移動体測位 NAV モード GNSS 衛星の信号追尾により、位置(緯度・経度・高さ)、速度(速さ・方位)、時間(時刻・日付・ PPS)を毎秒計算します。 位置、速度、時間の計算には、SBAS を除く 4 つ以上の GNSS 衛星を追尾している必要があり ます。 位置と速度を毎秒更新するため、移動体で用いる場合に適しています。 固定位置推定 SS モード(*2)(*3) GNSS 衛星の信号追尾により、位置(緯度・経度・高さ)、時間(時刻・日付・PPS タイミング)を 毎秒計算します。位置は、固定位置であることを前提に計算し、時間の経過とともに固定位置 の推定精度が上がります。 固定位置の計算には、SBAS を除く 4 つ以上の GNSS 衛星の追尾が必要です。4 衛星未満と なった場合も、SBAS を除く 1 衛星以上の追尾ができていれば、その時点までに推定した固定 位置を利用して、時間計算を行うことが可能です。 固定位置であることを前提に位置を推定することで、時間計算が安定的になりますので、固定 位置で使用する場合に適しています。 固定位置推定 CSS モード(*2)(*3) SS モードと動作内容は同じですが、固定位置を BBRAM(*4)にバックアップします。電源を OFF/ON した後も、前回 ON 時に推定した固定位置を用いて固定位置を推定しますので、ON 後の固定位置の推定精度が劣化しません。 電源 OFF の前後でアンテナ位置が変わらない場合に適しています。変わる場合は、SS モード をご利用ください。 位置固定 TO モード GNSS 衛星の信号追尾により、時間(時刻・日付・PPS タイミング)のみを毎秒計算します。位 置は、固定位置であることを前提にしており、本コマンドで設定(*5)する必要があります。 SBAS を除く 1 衛星以上の追尾ができていれば、設定した固定位置を利用して、時間計算を行 うことが可能です。 GNSS 測位よりも確かな固定位置が既知の場合や、GNSS 追尾衛星数が極端に少ない環境 下などでの使用に適しています。 (*1) NAV モード以外の位置モードで、アンテナの設置位置を変更した場合、必ずRESTARTコマンドでリセットしてく ださい。リセットを行わずに使用した場合、条件によっては測位できなくなる恐れがあります。 (*2) TO モードに自動遷移後は、固定位置と位置モードは BBRAM にバックアップされ、電源 OFF/ON 後も TO モー ドとして起動します。 (*3) SS または CSS モードの場合でも、オープンスカイ(信号レベルが 40dB-Hz 以上の衛星が測位使用衛星の 50% 以上の環境)では 1 時間程度、弱信号環境下では 8 時間程度の固定位置推定を行うことで、以降は TO モード と同等の 1PPS 精度を得ることができます。 (*4) “8 受信機が BBRAM にバックアップする項目”の章を参照ください。 (*5) 本コマンドを使用して設定する他に、SS または CSS モードから自動遷移させると自動的に設定できます。また、 第 3 フィールド以降を省略することで、現在の固定位置推定値を設定できます(SS または CSS モードで固定位 置推定ができている状態に限る)。表示位置は変換誤差のために設定位置とわずかに異なる場合があります。
B TO NAV SS CSS G H D G,J H F I F I H G,J F I E A,C Figure 6.1 位置モードの遷移チャート 位置モード遷移条件 固定位置推定値と 位置推定の更新時間 A 初回起動時または FACTORY リスタート(デフォルト) 破棄します B 前回の位置モードが”0”(NAV モード)の状態で起動 破棄します C 前回の位置モードが”1”(SS モード)の状態で起動 破棄します D 前回の位置モードが”2”(CSS モード)の状態で起動 保持します E 前回の位置モードが”3”(TO モード)の状態で起動 保持します F 位置モードを”0”(NAV モード)に設定 破棄します G 固定位置推定後、”3”(TO モード)に設定 ユーザー固定位置を設定後、”3”(TO モード)に設定 保持します H 位置モードを”1”(SS モード)に設定 破棄します I 位置モードを”2”(CSS モード)に設定 破棄します J 位置固定への遷移条件を満たした Note: 遷移条件を満たして TO モードになった後に電源を OFF した場合は、位置モードは TO モードで再開します。 保持します - 本コマンドにて NAV モードにシフトする場合、HOT リスタートがかかります。 - 位置固定に自動遷移するためには、SS または CSS モードに設定しておく必要があります。
- sigma threshold と time threshold を両方設定した場合、どちらかを満たした時点で TO モードとなります。閾値 を 0 に設定した場合、その閾値は使用されません。(TO モードへの遷移条件となりません。)
6.1.15 TIME – 初期時刻の設定
初期時刻を設定します。本設定は、他の要因により時刻が確定していない場合に限り有効です。 時刻のロールオーバー設定については時刻確定後も設定可能です。
Format:
$PERDAPI , TIME , time of date , day , month , year *hh <CR> <LF>
1 2 3 4 5
Field Data type Range Default Description
1 TIME - - コマンド名 2 time of date 00 to 23 00 to 59 00 to 59 0 UTC(時間) UTC(分) UTC(秒) 3 day 1 to 31 22 UTC(日) 4 month 1 to 12 8 UTC(月) 5 year 2013 to 2099 1999 UTC(年) 例: $PERDAPI,TIME,021322,24,11,2020*64 2020 年 11 月 24 日 02:13:22 に設定 Notes: - このコマンドによる設定は、実際の時刻に対し、±1 年以内の範囲で設定してください。 - GPS ロールオーバーおよび GF-870x 時刻ロールオーバーに関しては、以下を参照ください。 イベント 日付 GPS 週番号 GPS 週番号ロールオーバー(1 回目) 初期時刻 1999/08/22 1024 GPS 週番号ロールオーバー(2 回目) 2019/04/07 2048 GF-870x ロールオーバー時刻 (再通電後+GLONASS 未測位時) 2032/08/15 2745 GPS 週番号ロールオーバー(3 回目) 2038/11/21 3072 … 動作可能上限時刻 2099/12/31 6260 [GLONASS を測位していない場合] - 通電中、もしくは、電源が OFF/ON されても、バックアップ電流の供給が継続していれば、2099/12/31 まで時刻 は適切に更新されます。 - バックアップ電流の供給が停止している状態で電源を OFF/ON またはリスタートした場合、2032/8/15 までは時 刻は適切に更新されます。ただし、それ以降は 2012/12/30 に戻ります。その場合、本コマンドで適切な日付を設 定することで、適切な日付に修正されます。 [GLONASS を測位している場合]
- GLONASS の航法メッセージ情報を用いて、自動的に GPS ロールオーバー回数を取得し、GLONASS を first fix したタイミングで適切な時刻に更新されます。したがって、バックアップ電流の供給が停止している状態で電源
6.1.16 TIMEALIGN – 時刻&PPS 同期モードの設定
Format:
$PERDAPI , TIMEALIGN , mode *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 TIMEALIGN - - コマンド名 2 mode 1 to 3 2 1:GPS 同期 2:UTC(USNO)同期 3:UTC(SU)同期 例: $PERDAPI,TIMEALIGN,2*31 UTC(USNO)同期 Notes: - 0 は無効値なので、入力時はご注意ください。 - 各同期モードの詳細は以下の通りです。 [1: GPS 同期] 閏秒が適用されなくなり、GPS 時刻として各センテンスが出力されます。 各センテンス…GGA, GLL, GNS, RMC, ZDA, TPS1 の時刻フィールド PPS が GPS 同期となります。 GLONASS 単独測位時は、正しい時刻を出力させるためには、適切なデフォルト閏秒を設定する必要があります。 [2: UTC(USNO)同期] 閏秒が適用されます。 PPS が UTC(USNO)同期となります。(GPS より UTC(USNO)パラメータ受信後)
GLONASS 単独測位時は、UTC(USNO)パラメータを GLONASS からは取得できないため、PPS は GPS 同期状 態を維持する形となります。 [3: UTC(SU)同期] 閏秒が適用されます。さらに GMT オフセットが+3:00 になります。 PPS が UTC(SU)同期となります。(GLONASS より UTC(SU)パラメータ受信後) GPS 単独測位時は、UTC(SU)パラメータを GPS からは取得できないため、PPS は GPS 同期状態を維持する形 となります。 - 上記において、QZSS は GPS として扱われます。
6.1.17 TIMEZONE – ローカルゾーンタイムの設定
このコマンドによる設定は ZDA センテンスに反映されます。(ローカルゾーンのフィールドだけでなく、ZDA の UTC 時刻のフィールドにも反映されます。)
Format:
$PERDAPI , TIMEZONE , sign , hour , minute *hh <CR> <LF>
1 2 3 4
Field Data type Range Default Description
1 TIMEZONE - - コマンド名 2 sign 0 to 1 0 GMT 符号 0:+(プラス) 1:-(マイナス) 3 hour 0 to 23 0 GMT(時間) 4 minute 0 to 59 0 GMT(分) 例: $PERDAPI,TIMEZONE,0,9,0*69 GMT のオフセットを+9 時間 00 分で設定 Notes: - UTC(SU)時刻同期に設定した場合、自動的に GMT offset が+3:00 になります。
6.2
CFG – Setting of Application Software
6.2.1 NMEAOUT – 標準 NMEA 出力設定
Format:
$PERDCFG , NMEAOUT , type , interval *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 NMEAOUT - - コマンド名
2 type (*1) -
出力する標準 NMEA センテンス
(*1) GGA, GLL, GNS, GSA, GSV, RMC, VTG, ZDA, ALL 「ALL」は全ての標準 NMEA センテンスを意味します。 3 interval 0 to 255 - 出力更新周期 [秒] "0"に設定した場合は、出力を停止します。 例: $PERDCFG,NMEAOUT,GGA,2*57 GGA センテンスを 2 秒毎に出力する $PERDCFG,NMEAOUT,GSV,0*56 GSV センテンスを停止する 6.2.2 UART1 – シリアルポートの設定 Format:
$PERDCFG , UART1 , baud *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 UART1 - - コマンド名 2 baud 4800, 9600, 19200, 38400, 57600, 115200 38400 ボーレート [bps] 例: $PERDCFG,UART1,115200*65 ボーレート:115200 bps Notes: - このコマンドでシリアルポートの設定を変更した場合、ACK はそれまでのボーレートで出力されます。 - 低いボーレートに設定している場合、全てのセンテンスを出力するために、NMEAOUTコマンドとCROUTコマン ドを使って出力するセンテンスのサイズを調節してください。
6.3
SYS – PVT System
6.3.1 ANTSEL – アンテナ入力端子の設定
Format:
$PERDSYS , ANTSEL , input *hh <CR> <LF>
1 2
Field Data type Range Default Description
1 ANTSEL - - コマンド名 2 input FORCE1L FORSE2 FORCE2 GNSS アンテナ入力端子使用設定 FORCE1L:#6(RF PIN)端子を使用 FORCE2:#RF(RF_COAX)端子を使用 例: $PERDSYS,ANTSEL,FORCE1L*7B $PERDSYS,ANTSEL,FORCE2*34 Notes: - GNSS アンテナ入力端子(#6(RF PIN), #RF(RF_COAX))を設定します。この設定は, GF-8701, GF-8702, GF-8703 で有効です。GF-8704, GF-8705 では使用しないでください。 - 現在の設定状態を確認する場合は、以下のコマンドを発行してください。 $PERDAPI,ANTSEL,QUERY*11. 6.3.2 VERSION – ソフトウェアバージョンの出力要求 Format: $PERDSYS , VERSION *hh <CR> <LF> 1
Field Data type Range Default Description
1 VERSION - - コマンド名
例:
7
専用 NMEA 出力
本受信機専用の出力コマンドです。コマンドは専用のセンテンスであることを示す”$PERD”で始まります。
7.1 ACK – コマンド受信確認出力
Format:
$PERDACK , command , sequence , subcommand *hh <CR> <LF>
1 2 3
Field Data type Range Default Description
1 command - - 受信したコマンドの最初のフィールド 2 sequence -1 to 255 0 受信に成功したコマンド回数 コマンド受信に成功するたびに 1 加えられ、0 から 255 を繰り 返します。 コマンド受信に失敗した場合は-1 を返します。 3 subcommand - - 受信したコマンドの 2 番目のフィールド 例: $PERDACK,PERDAPI,-1,PPS*72 PERDAPI,PPS コマンドを入力できなかった Notes: - コマンドは確認応答が送られる前にチェックサムが有効でなければなりません。
7.2
API – eRide GNSS Core Library Interface
7.2.1 EXTSYNC – 外部同期出力
Format:
$PERDAPI , EXTSYNC , mode , delay set , delay calculate *hh <CR> <LF>
1 2 3 4
Field Data type Range Default Description
1 EXTSYNC - - コマンド名 2 mode 0 to 4 0 外部同期モード 0:OFF モード 1:ON モード① 2:ON モード② 3:自動切り替えモード① 4:自動切り替えモード② 3 delay set -999999 to +999999 0 EPPS タイミング遅延時間の設定値 [nsec] 4 delay calculate -999999 to +999999 0 GNSS 測位から生成する PPS から自動的に計算した EPPS タイミング遅延時間 [nsec] この値が設定されるのは mode が ON モード②と自動切 り替えモード②の場合のみで、その他の場合は 0 になり ます。 例: $PERDAPI,EXTSYNC,2,0,20*15 外部同期モード:ON モード② 外部同期切り替え時の位相差:20 nsec Notes: - EXTSYNC 機能の詳細はEXTSYNCコマンドを参照ください。
7.3
CR – eRide GNSS Core Library Interface
7.3.1 CRW (TPS1) – 時刻情報(現在年月日、時刻と閏秒)
Format:
$PERDCRW , TPS1 , Date & Time , time status , update date , present LS ,
1 2 3 4 5
future LS , pps status , reserve , reserve *hh <CR> <LF>
6 7 8 9
Field Data type Range Default Description
1 TPS1 - - コマンド名
2 Date & Time 14-byte
fixed length 19990822000000 現在時刻 上位桁より年、月、日、時、分、秒の順に表されます。 3 time status 0 to 2 (1 byte) 0 現在の時刻ステータス(出力センテンス) 0:RTC 1:GPS(衛星から得られた閏秒がない、または、適応 していない状態) 2:UTC(衛星から得られた閏秒があり、かつ、適応し ている状態)
4 update date 14-byte
fixed length 00000000000000 閏秒調整予定時刻 上位桁より年、月、日、時、分、秒の順に表されます。 5 present LS -31 to +32 (3 byte) +17 現在の閏秒 6 future LS -31 to +32 (3 byte) +00 調整後の閏秒 7 pps status 0 to 3 (1 byte) 0 現在の PPS の同期ステータス 0:RTC 1:GPS 2:UTC(USNO) 3:UTC(SU) 8 reserve (10 byte) - Reserve field 9 reserve (5 byte) - Reserve field 例: $PERDCRW,TPS1,20120303062722,2,20120701000000,+15,+16,2,+00000.000,+0000*27 現在時刻:2012/03/03 06:27:22 現在時刻ステータス:UTC 閏秒調整予定時刻:2012/7/1 00:00:00 現在の閏秒:+15 調整後の閏秒:+16 PPS ステータス:UTC(USNO)に同期して PPS を出力 Notes: - このセンテンスは毎秒出力します。 - 「$PERDAPI,CROUT,W,0*4F」を入力するとこのセンテンスは出力停止します。 - 閏秒調整予定時刻は、予定がない場合は 0 として表示されます。
制限事項:
time status について
alignment 測位前 測位後 衛星情報より閏秒取得後
GPS RTC GPS GPS
UTC (USNO) RTC GPS UTC
UTC (SU) RTC GPS UTC
出力時刻を調整するために使用される閏秒について alignment 測位前 測位後 衛星情報より閏秒取得後 GPS 0 0 0 UTC (USNO) デフォルト閏秒 デフォルト閏秒 衛星情報より得た閏秒 UTC (SU) デフォルト閏秒 デフォルト閏秒 衛星情報より得た閏秒 GF-870x は以下のいずれかを満たすと、衛星情報より閏秒を取得します。 ① GPS から UTC パラメータを受信する。 ② GPS と GLONASS の両方を測位する。
7.3.2 CRX (TPS2) – PPS の状態出力
Format:
$PERDCRX , TPS2 , pps status , pps mode , pps period , pulse width , cable delay ,
1 2 3 4 5 6
polarity , reserve , reserve , reserve , reserve , reserve , reserve *hh <CR> <LF>
7 8 9 10 11 12 13
Field Data type Range Default Description
1 TPS2 - - コマンド名 2 pps status 0,1 (1 byte) 1 PPS 出力状態 0:PPS OFF 1:PPS ON 3 pps mode 0 to 3 (1 byte) 1 PPS 出力モード 0:常時出力停止 1:常時出力 2:1 衛星以上測位中のみ出力 3:TRAIM 正常時のみ出力 4 pps period 0 (1 byte) 0 PPS 出力周期 0:1PPS(1 秒毎にパルスが出力) 5 pulse width 001 to 500 (3 byte) 500 PPS パルス幅 [msec] 6 cable delay -100000 to +100000 (7 byte) +000000 PPS ケーブルディレイ [nsec] 7 polarity 0,1 (1 byte) 0 PPS の同期エッジ 0:立ち上がり 1:立ち下がり 8 reserve (1 byte) - Reserve field 9 reserve (4 byte) - Reserve field 10 reserve (6 byte) - Reserve field 11 reserve (4 byte) - Reserve field 12 reserve (8 byte) - Reserve field 13 reserve (7 byte) - Reserve field 例: $PERDCRX,TPS2,1,1,0,200,+000000,0,1,0005,-0.876,0000,00000000,+000000*0F PPS 出力状態:PPS ON PPS 出力モード:常時出力 PPS 出力周期:1PPS PPS パルス幅:200 msec PPS ケーブルディレイ:+000000 nsec PPS 同期エッジ:立ち上がり Notes: - このセンテンスは毎秒出力します。 - 「$PERDAPI,CROUT,X,0*40」を入力するとこのセンテンスは出力停止します。
7.3.3 CRY (TPS3) – 位置モード&TRAIM 出力
Format:
$PERDCRY , TPS3 , pos mode , sigma , sigma threshold , time , time threshold ,
1 2 3 4 5 6
TRAIM solution , TRAIM status , Removed SVs , Receiver status , reserve *hh <CR> <LF>
7 8 9 10 11
Field Data type Range Default Description
1 TPS3 - - コマンド名 2 pos mode 0 to 3 (1 byte) 1 位置モード 0:移動体測位 NAV (navigation) モード 1:固定位置推定 SS (self survey) モード 2:固定位置推定
CSS (continual self survey) モード 3:位置固定 TO (time only) モード 3 sigma 0000 to 1000 (4 byte) 1000 現在の推定位置の分散値 [m] 4 sigma threshold 000 to 255 (3 byte) 000 位置固定に自動で遷移するための推定位置σ の閾値 [m] 5 time 000000 to 999999 (6 byte) 000000 位置推定更新時間 [秒] 推定位置が未測位の場合は更新しません。 6 time threshold 000000 to 604800 (6 byte) 000000 位置固定に自動で遷移するための位置推定更 新時間の閾値 [秒] 7 TRAIM solution 0 to 2 (1 byte) 2 TRAIM solution 0:正常 1:アラーム出力中 2:TRAIM が機能するために必要な数の衛星を 追尾していない 8 TRAIM status 0 to 2 (1 byte) 2 TRAIM status 0:アラーム検出と異常衛星排除が可能 1:アラーム検出のみ可能 2:検出、排除とも不可能
9 Removed SVs (2 byte) 00 TRAIM により排除された衛星の個数 10 Receiver status (10 byte) - Reserve field
11 reserve (10 byte) - Reserve field 例: $PERDCRY,TPS3,2,0003,001,002205,086400,0,0,00,0x00000000,0x00000000*0C 位置モード:CSS 推定位置σ:3 [m] 位置固定モードに移行するための推定位置 σ の閾値:1 [m] 推定位置更新時間:2205 [秒] 位置固定モードに移行するために必要な推定位置更新時間:86400 [秒] ▲0 ▲0
7.3.4 CRZ (TPS4) – Output Time Transfer Info per Second (Frequency)
Format:
$PERDCRZ , TPS4 , frequency mode , phase skip flag , alarm , status , PPS timing error ,
1 2 3 4 5 6
frequency error , reserve , learning time , available time , reserve *hh <CR> <LF>
7 8 9 10 11
Field Data type Range Default Description
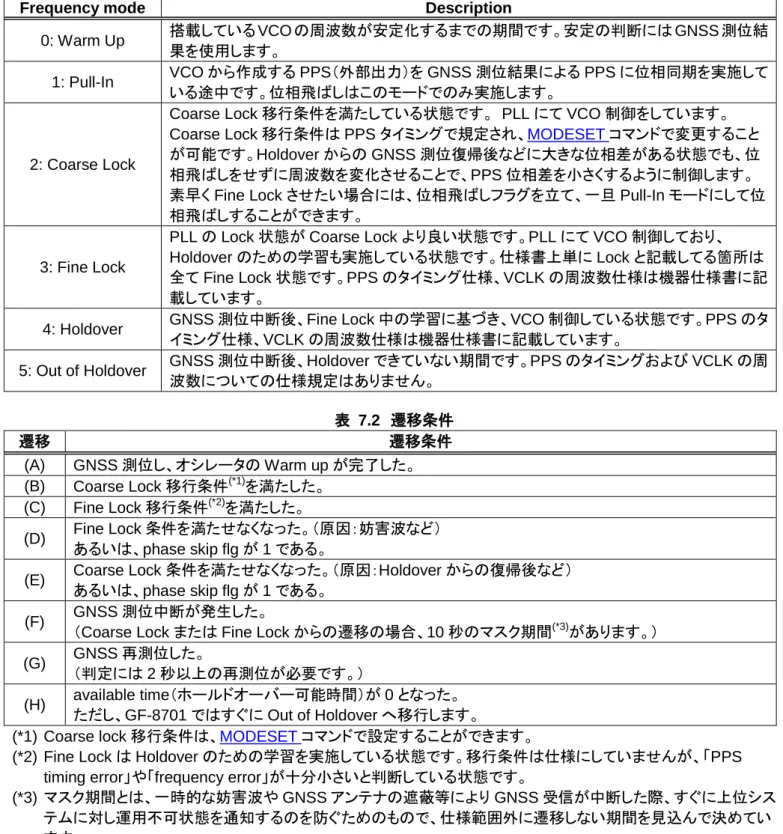
1 TPS4 - - コマンド名 2 frequency mode 0 to 5 (1 byte) 0 0: Warm Up 1: Pull-In 2: Coarse Lock 3: Fine Lock 4: Holdover 5: Out of Holdover 3 phase skip flag 0,1
(1 byte) 1 位相飛ばしフラグ 0:自動判定 1:実施 4 alarm 00 to FF (2 byte) 00 アラーム(16 進数) 00:正常 01:アンテナ電流異常(OPEN) 02:アンテナ電流異常(SHORT) 04:発振器異常 08:発振器制御範囲異常 複合アラームの場合、これらの論理和を出力します。 5 status 00 to FF (2 byte) 01 ステータス(16 進数) 0x00:下記ステータス以外 0x01:アンテナ端子へ給電する 0x02:EPPS 信号を使用している状態 0x04:予約 0x80:予約 複合ステータスの場合、これらの論理和を出力しま す。 6 PPS timing error -999999999 to +999999999 (10 byte)
- PPS timing error [nsec]
7 frequency error
-99999 to +99999 (6 byte)
- VCLK の出力周波数偏差 [ppb] 8 reserve (4 byte) - Reserve field
9 learning time 0000000 to 9999999 (7 byte) 0 Holdover のための学習を実施している時間 [sec] 10 available time 000000 to 999999 0 Holdover が可能な時間 [sec]
- frequency mode の状態遷移図と遷移条件は下記の通りです。 0: Warm Up 1: Pull-In 2: Coarse Lock 3: Fine Lock 4: Holdover 5: Out of Holdover A B C E H 電源ON RESTARTコマンド発行 F F G D F G 外部リセット (RST_N) :このイベントが発生すると、矢印先のステートに遷移します。 図 7.1 frequency modeの状態遷移図