自律的モデル構造変更 による メカトロニクス機構設計支援システム
岡 田 学 長 谷 川 光 彦 小 泉 創
I C A D s y s t e m f o r M e c h a t r o n i c s M e c h a n i s m u s i n g t h e T e c h n i q u e
of Autonomus Changing of Structural Model
Manabu OKADA Mitsuhiko HASEGAWA Hajime KOIZUMI
Designworkcanbehandledassearchingproblemsofexplication.Inthispaper, searchareaisdevidedinto"SearchAreaofSystem Structure"and"SearchAreaof StmctualElements".Andthenweproposedmodelingtechniqueandsearchingmethods foreacharea.ItisappliedtoIntelligentCADsystem withCESPprogramminglan・
guage,anduniaxialfeedtablesystem wasdesignedbythesystem.Sotheoputimum systemstructureissearchedandmodはed,anditisdecidedinflexiblyandreasonablly.
Andfurther,structualelementsareselectedinproperly.Andthesystem appliedto biaxialfeedtablesystem,soitisclarifiedthatthesystem isabletomakethecompli・ cated・combination・structuresofthesimplestuucture.Atlast,thesystem appliedto verticalliftersystem,soitismadesurethatthesystemiseffectivetospeciallycaselike it.
1. は じ め に
最近の機械 はメカ トロニクス化 されてきてお り,機構設計 とい う観点から,多 くの要素 の 中か ら最適 な組み合わせ構造 を選択す る必要性が生 じている. また メカ トロニクス化 に伴 い, 設計 自体 は単純化 されているが,位置決めの高精度化,移動速度の高速化, スペ ース,サイ
クルタイム, コス トな どの要求仕様 はます ます高度かつ多様 なものにな り,設計過程 は複雑 化 している.そ こで コンピュータによる支援に対 して社会的 な要求が高 まってきている.
設計作業を計算機上 で実現するためには,それ に必要 な知識を計算機上に表現 しなけれ ば ならない.それだけに,設計作業 の分析 と,それを計算機上 で実現するためのモデ リソグは 重要 な問題である.従来 の方法では,設計解の探索を単一の空間において行 っていたため, 機構 モデルが複雑 になると, その表現や管理が困難 になった.そ こで本研究 では,設計解 の 探索 において, システム構造探索空間 と構成要素探索空間を別々に扱 うとい う基本的手法及 び, オブジ ェク ト指向論理型言語 を用いて,自律的にモデル構造 の変更 を可能 とす る新 しい
'1993年6月14日 第11回設計シソポジウムにて発表 '*機械工学科 助手
日暮長岡技術科学大学工学部 助教授 日日 加藤スプリング(樵)
28 岡田 学 ・長谷川光彦 ・小泉 創
手法 を提案す る. そ して, システム構造探索空 間 と構成要素探索空間 の両者 を扱 うことので きるシステムの開発 を行 った. また,具体 的に メカ トロニクス機構 の設計例 について実行 し, 最適 なメカ トロ機構 のシステム構造が推論 によ り,探索 ・変更 され,その結果構造が柔軟 か つ合理的 に決定 され ることを示 した. これ によ り,複雑 な組み合わせ知識 として持た な くて も単純 な基本的構造知識 か ら複雑 な組 み合わせ構造 を持つ システムが構築 で きることを明 ら かに し,開発 した システムの有効性 を検証 した.
2.設計問題 における2つの探索空間 2. 1 2つの探索空間の分離性
設計作業 は一般 に設計解 の探 索問題 として扱 うこ とがで きる.設計解 の探 索空間 は,「シ ステ ム構造探索空間」 と 「構成 要素探索空間」 に分 けることがで き,工程設計, レイア ウ ト 設計 な どでは与 えられた構成要素 を用 いてシステム構造 を最適化す る問題,パ ラメ トリック 設計 な どではシステ ム構造 が与 えられ て構成要素を最適化す る問題,そ して一般 の設計問題 では システム構造 と構成要素の両者を最適化す る問題 として捉 える ことがで きる(I).これ ら の探 索空間の広 さを説明す る概念 図を図1に示す.本研究 では図2に示す よ うに, この2種 類 の探索部分 を分離 し, それぞれを体系化 して扱 う. これ によって探索表現 の様式化 を図 る
ことがで き,設計 モデルの取 り扱 いが容易 にな る.
システ ム構造探索部 は,設計対象の システ ム としての構造 を探索す るもので あ り,機能 に基 づ く段階 的詳細化 を基本 とす るので,part‑of 関係(2)に よる階層構造 として表 現す る.構 成要 素探 索部 は,設計対 象を構成す る個々 の要表 を 探索す るものであ り, ここでは特徴に基づ く段 階的詳細 化 に よって,is‑a関係(2)による階層構 造 として表現す る. それぞれの探索部 は, オブ ジ ェク ト指向 に よって表現す る.構成 要素探索 部 で は継承な どを伴 う静的 な階層構造 を用 いる ことがで きる. しか し, システ ム構造探索部で
システム構造探索空間広さ
構成 要素探索空間の広 さ
図1 設計分野 ごとの探索空間の広さ は構 造の組み替 えを伴 う動的 な階層構造 を必要
とす る.
2. 2 システム構造探索部
システム構造 の変更 を可能 とす る動 的な結合 を実現す るため に, ここでは図3に示す よ う なオ ブジ ェク ト管理 システ ムを用 いる. システ ム構築時 に必要 に応 じて,用意 された クラス オ ブジ ェク トか らイ ソスタソスオ ブジ ェク トを生成 し,黒板(5)を用 いて 1)ソク と リンク変更 を行 うことに よ り, システ ム構造 を構築 した り再構築 した りす ることを可能 にす る. また, 必要 な設計知識 は各 オ ブジ ェク ト内に与 えられてお り, システ ム構築案が設定 され る毎 に設 計 プ ロセスも自動的 に定 まる. これは部分指向政策(3)に よる全体 の部分‑ の分割 と, オ ブジ
ェク ト指 向表現 に よるカプセル化 を実現 した結果である.
2.3 構成要素探索部
∈≡
】 システ ム捕冶 探索空間 梢成 要素 探索空間システ ム捕迫 デー タベ ース 構成要素デ ー タベー ス 図2 提案するシステムの構成
機械設計では,標準化 された部品を カタ ログ的 き整理 しておいて,それ らを組み合 わせ て 設計 を進 め る標準化 された設計 も多 い.例 えば,軸受 けには滑 り軸受 けや転 が り軸受 けが あ り,転 が り軸受 けには玉軸受 けや ころ軸受 けがある, といった具合 である. これ らが オ ブジ ェク トとして体系的に表現 されていれ ば,適当なメ ッセ ージをや りとりしなが ら,条件 に合 う部品のクラスを選定 し,必要 な設計 を進 めてい くことがで きる(4).これ らを体 系化 管理 す るにはis‑a関係 に基 づ く木構造 を用 い るのが便利 で あ る. さらに,部品選定 に必要 な共 通 した手続 きな どは上位 の クラスにま とめておき,継承 に よって下位 のクラスか らそれ を利 用 すれ ば,下位 クラスの内容 は, それぞれ に固有 の ものだ けで良いので,知識 の メンテナ ンス 性 が良 くなる.
SObL03 SObL04
図3 インスタンスオブジェク トの生成による モデルのシステム構築
30 岡田 学 ・長谷川光彦 ・小泉 創
3.設計プロセス とモデル構造変更 3. 1 モデル構造 とその変更
システム構造 の構築 ・変更 に際 して,図3で示 した個々の機能要素 のイソスタソスオブジ ェク トを直接扱 うのは合理的ではない.そ こで, ここではインスタンスオブジェク トで構成 され る部分構造案をデータベ ース化 して蓄積 し,その部分構造 について取 り扱 うこととす る.
この部分構造案をモデル構造 と呼ぶ. したがって, システム構造案の作成 は, トップダ ウン 的 に仕様 の機能 を実現可能 なモデル構造 を選 び,階層的に結合 してゆ くことである.
構 成 要 薫
デ ー タIcl一SS̲Object
D プ ロ 苦 言 ̲ 一 一 一 一 一
一一 作 用一一一・一 参照 図4 提案するシステムの設計プロセス
各最末端のイソスタンスオ ブジ ェク トが全て構成要素データベースに存在す るもので表現 された時,システム構造案が作成 された と判断す る.次 には構成要素探索に移 り, システム 構造案 の最下層か らボ トムア ップ的に最適 な構成要素 を選定 してゆ く.評価 は一層上位 の ノ ー ドにおいて行 うよ うにす る.評価が使用を満足 出来 ない場合 は,その ノー ドか ら下層のモ デル構造 を別案 に変更 し,再度最適な構成要素を選定 してゆ く. システム構造 の トップに達 した時,設計が完了 した と判断す る.以上の設計 プロセスシステムの説明図を図4に示す.
3. 2 モデル構造変更の自動化 と設計プ ロセスの自動的設定
モデル構造 の変更 は,変更知識 によ り行 う.変更知識 は優先順位決定知識であ り,設計事 例 に基づ くヒュー リステ ィックな知識 となる. また,知的バ ック トラックの知識の働 きも持 たせ ることがで きる.将来的 には自己組織化を行 う手法を取 り入れ る必要があろ う.
モデル構造が変更 され ると,それに伴い設計 プロセスも変更 しなければならない. しか し 本 システムではモデル構造の設計方法 は,その上位の ノ‑ ドオ ブジ ェク トに与 えられている
ので, モデル構造が変更 されて も設計 プロセスを変更す る必要はない.下層 の設計 プ ロセス は,モデル構造変更 に伴い自動的pt変更 されることになる. したがって, モデル変更 と設計 プロセスの変更 は一体で成 され るので,設計 プロセスについて特別 な操作をす る必要 はない.
ただ し,各 オブジ ェク トに与 えられ る制約 は, ‑, ≧, ≦等の関係式 となることが多 いので, 定式化 されたパ ラメ トリック設計 のよ うには効率的ではない.
4.メカ トロニクス機構設計システムの構築
提案す る設計支援 システムに基づ くICAD (IntelligentComputerAidedDesign)システ ムを試作 し,検討 した. システムの試作 においては,CESP (CommonExtendedSelfcon・
tainedProlog)言語(6)(7)を用いた.
4.1 ‑軸送 りテーブルの設計例
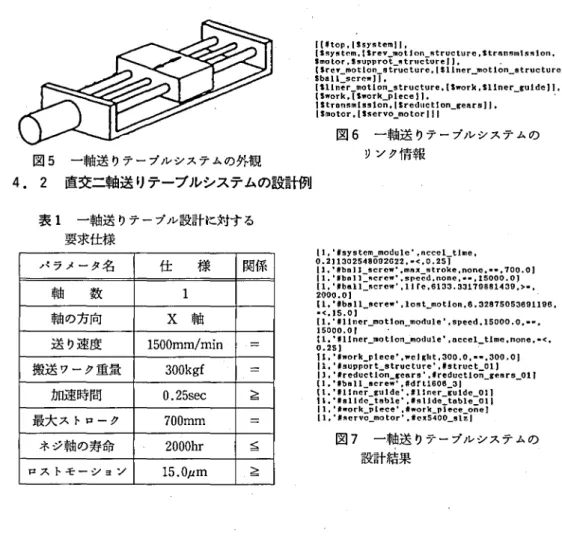
設計対象 として図5のよ うな‑軸送 りテーブルシステムを選 び,設計 を行わせた.表 1に 設計 に関す る要求仕様 を示す.その結果,生成 された リンク情報 を図6に, それ によるモデ ル構造を図8に示す. また,個々の構成要素に関す る選定結果を図7に示す.‑軸送 りシス テムの設計 は,搬送 システムの基本形 ともいえる構造である.それが要求仕様 に よって, 自 律的にモデル構造 を構築 し,構成要素の特性探索 まで行 い,最適解 を得た.
・ ∴
図5 ‑軸送 りテーブルシステムの外観 4. 2 直交=軸送 りテーブルシステムの設計例
表1 ‑軸送 りテーブル設計に対する 要求仕様
バラメ‑タ名 仕 様 関係
軸 数 1
軸の方向 Ⅹ 軸
送 り速度 1500mm/min 搬送 ワ‑ク重量 300kgf
加速時間 0.25sec ≧ 最大ス トローク 700mm
ネジ軸の寿命 2000hr ≦
ltop.LSsystenl)
lSSy事tCTTl.tSrey̲TnOtJon 令trUCtUrC,StrIlTISmt" Ion.
h otor.Ssupprot̲ltrtlCtureJ).
LSrey̲lYIOtlorLgtruCture.LS11nt・r̲TnOtlon̲8truCtUrC Shall SCrC▼日 .
lIllTl言r̲motlon̲strtJCturC.tSyrork.Sllner̲EUldel1.
LSyrork.LS▼ork‑pleceH.
tltm nsrIIIH lon.lSrcdtlCtlon̲Fear5日.
LSmotor.lSscrvo̲rnotor日 ]
図6 ‑軸送 りテーブルシステムの リンク情報
#SyStCm̲ITIOdule'.nccel tine.
1302548092622.一<.0.25)
kbz)H scrc▼●.m a x ̲Stroke.none.IT.700.0 1h ll=キCrC▼●,SPCCd,TIOne..‑ .15000.OI rbELll̲screy'.llre.613:I.33179881‑139.>■
2000.0】
ll.●lballJ Cre▼●.10万Lnotlon.6.32875053691198.
‑く.15.0】
[1..1111‑Cr̲TnOtlon̲TTIOdule'.spec°.15000.0.・‑.
15000.01
●2●●●■●●
●
●l●l1t一l1111l一〇一1‑.‑I‑1‑‑一1
111ncrTnOtloTlnOdulel.ACCCl̲tllne.none,・<.
25】
Jyrork̲plece'.Y・cJFllt.300.0.‑‑.300.0】
Xsupportー9trUCture..#struct̲Ol) lreductlonJ e8rS●.lreductlon̲ge8rS一〇17 1bBllJ ereY●.#drt1608̲3J
f1lncr̲gtl1dc'.IIIner̲Fulde̲011
*$11dc̲table',NSllde̲table̲011 lyorkJ'lece'.+★ork̲plece̲oTlel X東erYO̲mOtOr'.lcx5‑一oo̲Sll,J
図7 ‑軸送 りテーブルシステムの 設計結果
32 岡田 学 ・長谷川光彦 ・小泉 創
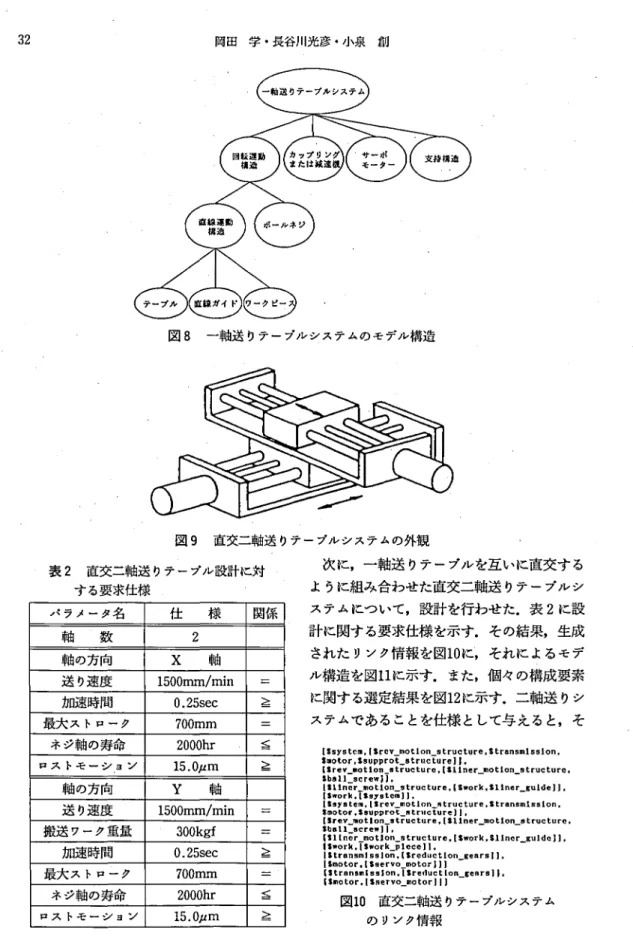
図8 ‑軸送 りテーブルシステムのモデル構造
図9 直交二軸送 りテーブルシステムの外観 表2 直交二軸送 りテーブル設計に対
する要求仕様
パラメータ名 仕 様 関係
軸 ■数 2
軸の方向 Ⅹ 軸
送 り速度 1500mm/min 加速時間 0.25sec ≧
最大ス トローク 700mm ネジ軸の寿命 2000hr ≦
t]ス トモーシ、コソ 15.OFLm ≧
軸の方向 Y 軸
送 り速度 1500mm/min 搬送 ワ‑ク重量 300kgf
加速時間 0.25sec ≧
最大ス トp‑ク 700mm ネジ軸の寿命 2000hr ≦
次 に,‑軸送 りテー ブルを互 いに直 交す る よ うに組み合わせた直交二軸送 りテ ーブル シ ステムにつ いて,設計 を行わせ た.表2に設 計 に関す る要求仕様 を示す. そ の結果,生成 された リンク情報 を図10に, それ に よるモデ ル構造 を図11に示す. また,個 々の構成 要素 に関す る選 定結果 を図12に示す.二軸送 りシ ステムであ ることを仕様 として与 え る と, そ
lSsystcm.lSrcyITnOtlon̲sFtruCtUre.Itr811SITllsSlon.
Inotor.19UPprOt̲8truCtureJJ.
t一rey̲rpotlon̲9truCturC.lillner̲TbOtlon̲9truCtt)rC.
lbAll̲screy日 ,
lI11ncr̲motlon̲Strt)CtLJre,lSyrork.Sllner̲fulde日 . (暮▼orlt.lS亨Y■tC・lTl日 .
ttJy9teTTI.L暮reyJnOtlon̲汚truCture.StrAnsrrLIzg与lon.
tpotor.暮9UT}prOt̲ntrt)CttJre日.
ttrey motlonJ truCture.Llllrter̲motion̲sttLtlCture.
暮bdll二8CreYH .
tllncrlmOtJon̲5tnJCttJre.LSyork.Sllncr̲FuldcJ) Syrork.LIyork̲plcceH .
ltr8TISmlsslon.lSredlJCtlonJ ears日 . 暮notor.lS9erYOIntOtOrIH
StranSTItlsslon.ISreductLon̲gear8H . Inotor,tSseryo̲notor日 )
図10 直交二軸送 りテーブルシステム の リソク情報
れに応 じたモデル構造 を構築 し,その構成要素の 特性 を探索,最適化を行 った. このよ うな設計 も 従来 な らは,多軸系のシステム設計のためのモデ ル構造を全 て用意 しておかなけれ ばな らなかった.
しか し,本 システムにおいては,‑軸系のシステ ムを設計す るの と同 じだけの知識 によって, よ り 複雑 なシステムの設計 を行 うためのモデル構築が 可能であることを実証 した. これによって,本 シ ステムが,実際の メカ トロニクス機構設計 で行わ れているよ うに,単純 な機構 の組み合わせ によっ て,複雑 な機構 を実現 してゆ く設計問題支援 に対 して,有効 であることを示 した.
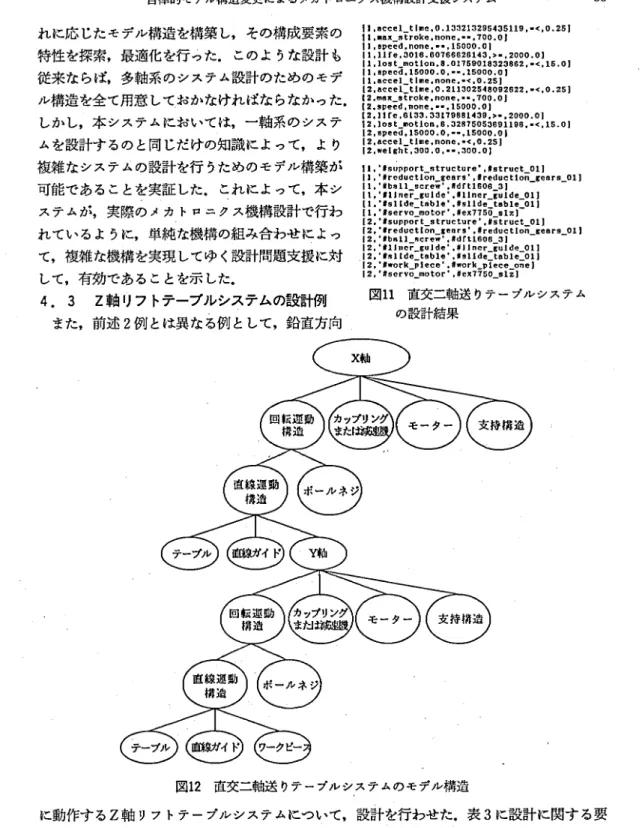
4. 3 Z軸 リフ トテ‑プルシステムの設計例 また,前述2例 とは異なる例 として,鉛直方向
l‑l11l1222'︼222211一l11l'●'l22'l'●2
acceL tlne.0.13:1213295435119,‑<.0.25I M X̲Stroke.tlOTle.‑ .丁oo.OJ
叩 Ced.norle.ll.15000.01
lire.3016.80766626143.>1.2000.0】
109tTTIOtlon.8.01759018323862.■<.lJ;.0】
叩 ee古.15000.0.日 .15000.0】
aCCel̲tllTle.none.1・<.0.25J
accel tlTne,0.211302548092622.T<.0.25】
M X̲9言roke.none.・1.700.OJ u eed.TIOTle.‑ .lSOOO.0)
llre.6133.33179881139.>‑.2000.01 108t̲MOtlon.a.328750536℡1196.■<.15.01 9Peed.15000.0.H .lSOOO.OI
accel̲tlTrle.none.・<.0.25I yeIがIt.300.0.I..300.0)
'JstJPPOrt̲,trlJCttJ
r
e'.如tT・tJCt̲01I'rreductlon̲gC8rg
.
.fredL)Ctlon̲gears̲01I.Nball̲SCr'eYr'.#drt1608̲3】
.llJner̲gulde'.lLlncr̲rulde̲01】
'lSllde̲table..Isllde̲table̲Oil
●Iseryo‑nlOt・OrI,#ex775oJIlZ)
●IsupporLgtrtJCture'.#strtJCLOl)
'lredtJCtlon̲書eLLrS',lreductlon̲rcAr8̲01I '1bqlLscreyl.ldlt1608̲3l
'llJner̲guJde'.I‖Jncr̲guldc̲OII
●hllde̲t8ble'.一911deJAble̲01J
'lrorklPlecel.lvrorlLplece̲oTle)
'#seryo̲motorI.Xcx7750̲SlZiJ
図11 直交二軸送 りテーブルシステム の設計結果
図12直交二軸送 りテーブルシ.ステムのモデル構造
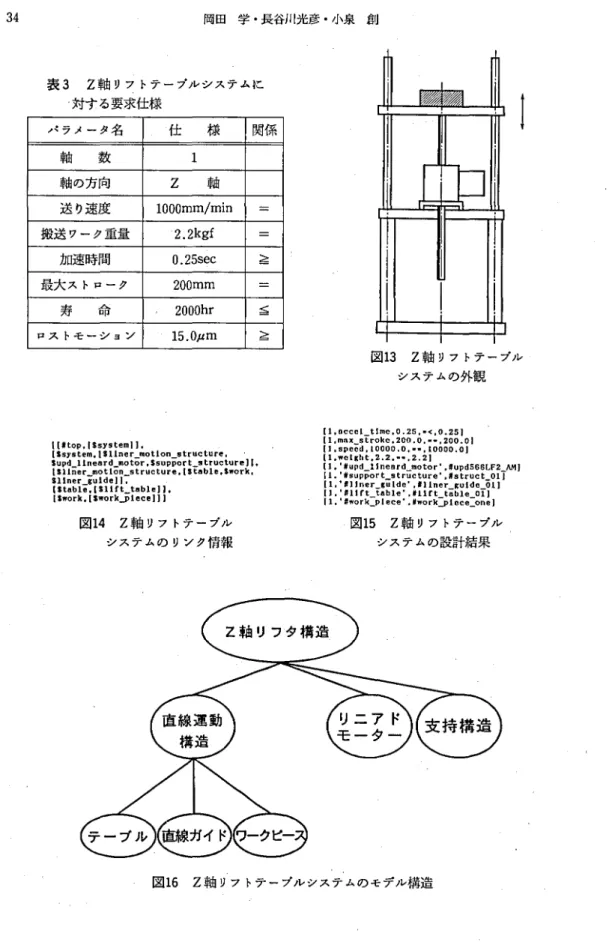
に動作す るZ軸 リフ トテーブルシステムについて,設計 を行あせた.表3に設計 に関す る要 求仕様 を示す.その結果,生成 された リンク情報 を図14に,それによるモデル構造 を図16に 示す. ここで選択 されている リニア ド ・モーターはモーター自体 にラック ・ピニオン機構 を 既に組み込 んであるもので,複合的な機能を持 った構成要素 として軽負荷時に適応 し, コソ
34 岡田 学 ・長谷川光彦 ・小泉 創
表 3 Z軸 1)フ トテ ー ブル システ ムに 対す る要求仕様
パ ラメータ名 仕 様 関係
軸 数 1
軸 の方向 Z 軸
送 り速度 1000mm/min
搬送 ワーク重量 ・2.2kgf
加速時間 0.25sec ≧
最大 ス トローク 200mm 寿 命 2000hr ≦
ロス トモ ーシ ョン ‑15.0〝m ≧
tL#top.rlsysltemll,
LIsystem.1‡1lnerlRtOtlon̲Structure.
StJPd̲llneardTれOtOr.IstJppOrt,̲SttltJCture)I tsllner̲rM'tl言n̲structure.tstAble.Iyrot・k.
Sllner̲gUlde日 , lttable.lSllrL tzLble日 . L暮yrork.LSyork̲plece)))
図14 Z軸 リフ トテ ー ブル システ ムの リンク情報
1l▲一I11111 図13Z軸リフトテーブル システムの外観
8ccCl̲tJne.0.25.■<,0.25) ITITLX̲StrOkc.20(I.0.‑t.200.0】
.speed,10000.0....10000.0) .▼clght:.2.2.t1.2.2】
Nupd̲lJncard̲mot・orl.#upd566LF2̲∧MI
#support̲9trUCture'.一struct̲0lJ
kIJnerJ ulde..lllIICr̲guldc̲Ol)
#lIrL tAble■.Illrt̲table̲011 Hyyork̲pieceI.uyyorkJ)lece̲onel
図15 Z軸 リフ トテ ー ブル システ ムの設計結果
図16 Z軸 1)フ トテ ーブル システ ムの モデル構造
パ ク トな設計を実現出来 る.また,個々の構成要素に関す る選定結果を図15に示す. これ に よって,本 システムが特殊 な構成要素 も柔軟に扱 うことが可能であることを示 した. モデル 構造のデータベースに複合的な機能を持たせてある構成要素を用 いる場合 のモデル構造 を一 つ追加 しておけば,必要 に応 じて自律的に選定 され る. さらに,単体 のテーブル等 も製品化 されているが,その場合 も,それを用 いたモデル構造 を追加すれ ばよい. この よ うに,構成 要素の使 い方のモデル構造 を入力す るだけで よいので, メンテナンスが容易である.
5. 結 冨
システム論の観点か ら,設計 をシステム構造探索 と構成要素探索 とを明確 に分離す ること が重要であることを明 らかにした. また,従来オ ブジ ェク ト指向では実現 が難 しか った シス テム構造探索空間探索のための自律的モデル構造変更 を可能 とす る新 しい手法 を提案 した.
それによ り, メカ トロニクス設計に対 して自律的なモデル構造変更 と設計 プロセスの 自動的 設定が成 される知的設計支援 システムの構築を実現 した. さらに,単純 なモデル構造 を知識 ベースに持 っているだけで,要求仕様 に応 じ,柔軟 に複雑 な構造 を得 ることがで きることを 示 した.
参 考 文 献
(1) 小林重信,寺野隆雄 :知識システム‑ソドブック,オーム社,45‑54,(1990) (2)上野暗樹 :知識工学入門,オーム社 (1989)
(3)押野教朗 :部分指向政策 とモデpソベース ドアブ7,‑チ,イソテ 1)ジェソ トCAD(上),共立 (4)木村文彦 :オブジェク ト指向によるCAD/CAMのためのモデ 1)ソクとデータベース,情報処
理,Vol.29,No.4,pp.368‑373(1988) (5)大須AE'節雄 :知識ベース入門,オ‑ム社 (1986)
(6)近山 隆ほか :ESPer‑の道,bit,Vol.22,No.1‑12(1990)
(7)中沢 修,実近憲昭 :論理型言語 とオブジェク ト指向言語の融合,INAP'89論文集,pp.11‑ 20(1989)