1/30
長期観測運転データを用いた運転行動階層
モデルに基づく高齢運転者の危険運転行動
発生メカニズムの分析
―2020年度タカタ財団助成研究論文―
ISSN 2185-8950
研究代表者
山本 俊行
2/30
研究実施メンバー
研究代表者 名古屋大学 未来材料・システム研究所
教授 山本 俊行
共同研究者 名古屋大学 未来社会創造機構
特任講師 姜 美蘭
名古屋大学 未来社会創造機構
特任准教授 島崎 敢
3/30
報告書概要
本研究は,名古屋大学 COI プロジェクトで収集された高齢者データベースにおける人間特 性データと長期観測運転データを用いて,ケスキネンの運転行動階層モデルに基づき,高齢 運転者の危険運転発生メカニズムを明らかにすることを目的とする. 高齢運転者の運転行動データは被験者の車両に装着されたドライブレコーダーから常時記 録されたものであり,データ量が膨大である上,多様な情報が収録されているため,分析に 応じたデータの加工処理が必要である.本研究ではこのような大規模な GPS データを効率的 に処理できる新しいマップマッチングアルゴリズムを開発し,処理時間を大幅に短縮するだ けではなく高い処理精度を達成した. 安全態度の指標としては,危険運転などの危険な行動を確認する上で重要な役割を果たし ている ImpSS 尺度が用いられた.高齢運転者を対象にアンケート調査を実施した結果,中高 年層と、前期高齢者、後期高齢者は安全態度において異なる傾向を持っていることが分かっ た.高齢運転者は中高年層より計画的ではなく衝動的に行動する傾向が見られ,危険運転を 避けるよう適切な運転計画を提案することに意味があると考えられる. 安全態度における ImpSS 尺度と走行距離の関係性について生存モデルを用いて分析した結 果,前期高齢運転者は,感覚追求(SS)傾向が高いほど長距離を運転しやすく,充分な注意 喚起が必要であることが分かった.後期高齢運転者においては,感覚追求性と衝動性(Imp) 両方とも有意にポジティブな影響が確認され,後期高齢運転者の運転行動は心理的要因の影 響が大きいことが分かった. 安全態度とその他の運転計画指標との関係性について共分散構造分析を行った結果,感覚 追及性が高く衝動的であるほど右左折率が高い経路、または細街路など事故リスクが高い経 路を選択する傾向があることが確認された.本研究の成果は,今後高齢運転者の運転教育に おいて,個人の安全態度と健康特性に対応した運転計画指導や危険運転発生確率の予測など による安全運転支援策への活用が考えられる.4/30
目 次
長期観測運転データを用いた運転行動階層モデルに基づく 高齢運転者の危険運転行動発生メカニズムの分析 第 1 章 はじめに 1.1 研究背景 1.2 目的 第 2 章 分析に用いたデータの概要 2.1 名古屋大学高齢者データベースの人間特性データ 2.2 ドライブレコーダーによる運転行動データ 2.3 安全態度に関するアンケート調査データ 第 3 章 長期観測運転データの加工処理 3.1 ドライブレコーダーによる観測データの特徴 3.2 運転特性分析のためのマップマッチング処理 第 4 章 運転行動階層モデルに基づく安全態度と運転計画の関係性分析 4.1 安全態度と走行距離の関係性分析 4.2 安全態度と運転計画の関係性分析 4.3 分析結果 第 5 章 まとめと今後の課題 参考文献 付録5/30
第 1 章
はじめに
1.1 研究背景 社会の高齢化とそれに応じた交通社会の高齢化により,高齢運転者の免許保有者数は急増 し,事故の分担率も急増し,交通事故減少の働きにブレーキをかけている.加齢に伴い走行 距離は減るが,走行距離当たりの事故件数の増加は大きく,後期高齢になると急増する.75 歳以上の後期高齢運転者は,人身事故、特に死亡事故を起こす危険性が高いと言われる. 交通事故死者数の更なる減少と高齢者の安全運転を支援するため,衝突被害軽減ブレーキ やペダル踏み間違い時加速抑制装置等を搭載した安全運転サポート車両の導入も進んでいる. しかしながら,運転者は車両が安全になった分だけ自己の利益を求めて危険性の高い運転を する結果,事故が発生する確率は一定に保たれるとするリスク・ホメオスタシス理論に従え ば,車両の安全性を高めるだけでは交通事故削減につながらない.その上,高齢者は加齢に よる身体機能の変化により,認知・判断・操作の運転能力が低下する特性が見られるが,高 齢者自身は自らの身体能力の変化を十分に把握していないケースが多く,過信行動を取る危 険が潜在している. このようなジレンマを表現したのがケスキネンの運転行動階層モデルである.運転には運 転操作能力以外にも様々な能力が必要である.これらの運転に必要な能力を運転行動階層モ デルでは四つの階層に分類し,それぞれの関係性を生かした運転教育を行うことで事故リス クを減らすことが期待される.このモデルによれば,最上階の安全態度が一つ下の階の運転 計画に必要な能力を決めており,更に下の階層の適切な状況認識・操作技術を求める危険状 況に出会う確率を左右する.そのため,高齢運転者の交通事故削減のためには,危険に身を さらさないよう,高齢運転者の安全に対する態度と運転計画の関連性を把握し,それらが交 通事故リスクに及ぼす影響を明らかにする必要がある.本研究では,ケスキネンの運転行動 階層モデルに基づき,高齢運転者の安全態度と運転計画の二階層間の関係を分析することで, 高齢運転者の危険運転行動の発生メカニズムを明らかにすることを目的とする.それにより, 高齢運転者の交通事故削減に資する知見を得ることを目指す. 1.2 目的 本研究では,100名弱の高齢運転者を対象とした視覚機能・認知機能などの人間特性デ ータと運転行動の長期観測データを用いて分析を行う.運転行動データは,名古屋大学 COI 拠点活動の一環として,GPS および加速度センサーが内蔵されたドライブレコーダーによる 走行データを 1 年以上の長期間にわたって継続的に収集したデータである. 前掲の運転行動の階層モデルに基づき,安全態度に関する質問紙を設計し,安全態度に関 するデータを収集し,因子分析によりその構造を把握する.運転計画については,高齢運転 者の運転行動の長期観測データを用いた分析により,各高齢運転者の走行時間や走行距離の 特性、走行経路特性などの運転計画特性を把握する.上記の安全態度の構造分析と運転計画6/30 特性分析結果を統合し,安全態度が運転計画に及ぼす影響を明らかにする. 本研究では,運転行動の階層モデルに基づき,安全態度から危険運転行動までの関連性に ついて段階的に分析し,安全態度と運転計画の関係を定量的分析モデルリングにより明らか にすること,およびそれが危険運転行動に与える影響を把握することで,交通事故対策に対 する新たなアプローチとして新規性があり独創的である.但し,蓋然性の高い一般的な知見 を得るためには十分なサンプル数が必要である.本研究では,100 名弱の高齢運転者の運転行 動の長期観測データを用いることで高度な分析モデルの構築に十分なサンプル数を確保して いる.また,本研究で用いる長期観測運転データは,50 代から 80 代の運転者に対して継続的 に収集された走行データであり,中高年、前期高齢者、後期高齢者のデータが揃っているた め,加齢に伴う心身の機能の段階的な変化の分析が可能である. 但し,ドライブレコーダーの走行履歴データ量は膨大となるため,効率的な分析手法が必 要とされる.本研究ではこのようなデータから高齢運転者の運転計画や運転行動の効率的な 抽出方法が確立することで,今後の研究の効率的な推進に寄与することを目指す.
7/30
第 2 章
分析に用いたデータの概要
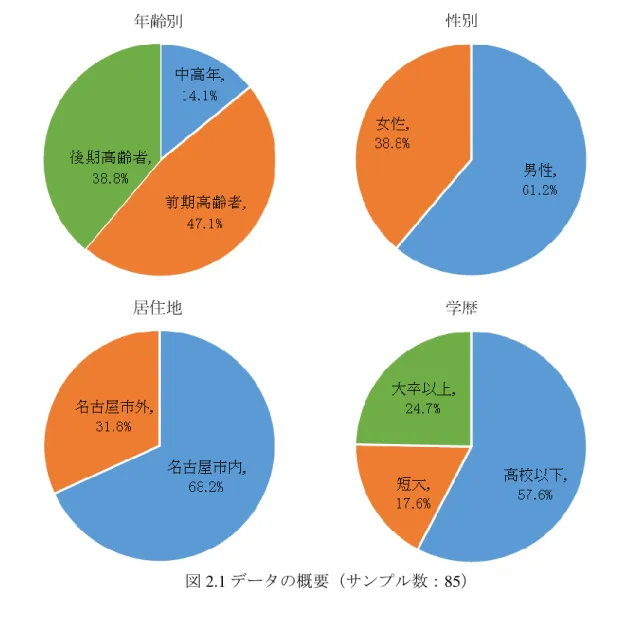
2.1 名古屋大学高齢運転者データベースの人間特性データ 本研究で使用されたデータは,名古屋大学「革新的イノベーション創出プログラム(COI STREAM)」プロジェクトの高齢運転者データベースから取得されたものである.このプロジ ェクトは、文部科学省及び(独)科学技術振興機構(JST)の推進するセンター・オブ・イノベ ーション(COI)プログラムの元,「高齢者が元気になるモビリティ社会」の実現を目指して いる.分析に用いた人間特性データは,名古屋市内・市外在住の 50〜85 歳の 85 名の一般ドラ イバーを対象に収集された年齢、性別などの社会属性と病歴、認知機能、視覚機能などの健 康属性データである.年齢によって,中高年(65 歳未満)、前期高齢者(65-74 歳)、後期高齢 者(75 歳以上)の三つのクループに分けられた.社会属性データの概要を以下の表 2.1 で示す. 表 2.1 社会属性データの概要 中高年層 前期高齢者 後期高齢者 サンプル数 12 40 33 平均年齢 58.3 70.8 79.0 免許取得平均年齢 38.3 51.3 53.1 性別 男性 6 26 20 女性 6 14 13 居住地 名古屋市内 10 27 21 名古屋市外 2 13 12 交通事故歴 あり 10 37 25 なし 2 3 8 以下,図 2.1 で全サンプルにおいての年齢別、性別、居住地別、学歴別の割合を示す.図 2.2 において,年齢層ごとの運転年数の分布を示す.前期高齢者と後期高齢者はほとんどの人が 50 年以上運転していることが分かる.8/30
図 2.1 データの概要(サンプル数:85)
図 2.2 年齢層ごとの運転年数の分布
健康属性データにおいては,眼疾患とその他の病歴に関するデータが収集された.図 2.3 に 示すように、中高年の方では 20%未満が眼疾患を抱えているが,前期高齢者と後期高齢者に
9/30 おいては 50%以上が眼疾患の問題を抱えている.その他の病気については,加齢と伴い病歴 ありの割合が明らかに増えている.中高年では 18.8%であったが,前期高齢者では 53.2%に, 後期高齢者においてはさらに増加して 61.1%に達した. 図 2.3 年齢層ごとの病歴保有者数の割合 2.2 ドライブレコーダーによる運転行動データ 上記の 85 名の研究参加者からは,インフォームドコンセントにより、研究参加の同意が得 られ,2015 年 3 月から自家用車にドライブレコーダー(DR)が設置され,日々の運転行動デー タが収集された.DR には GPS センサーが内蔵されており,タイムスタンプ、速度、加速度、 車両の GPS 位置、及びイベント記録が常時記録される. 本研究では 2015 年 3 月から 2019 年 3 月までに収集された DR 記録データを活用している. 対象期間中総計 226,597 回のトリップが確認され、総走行距離は 11,135,945km であった.図 2.4 で 1 トリップ当たりの走行距離の分布を示す.この図から年齢が増えるほど,短距離のト リップが多いことが分かる.図 2.5 は年齢層別の運転出発時刻の分布を示す.中高年は夕方か ら夜間のトリップが多いが,前期高齢者は夕方より朝ピーク時のトリップが目立つ. 一方, 後期高齢者は主に朝のピークと夕方のピークの間の日中に多く運転する傾向がみられる.
10/30 図 2.4 年齢層別の走行距離の累積度数分布 図 2.5 年齢層別の走行出発時刻の分布 DR データのイベント記録は,DR の仕様に基づいて,加速度センサーなどの情報から衝突, 急発進・急ブレーキ,急ハンドルなどのイベントを検知し,1 秒単位で記録している.複数の イベントが同時発生の場合は,発生したすべてのイベントが記録される.衝突は車両のドアを
11/30 開閉するときの衝突も記録しており,他のイベントに比べ発生回数が多い.図 2.6 で示す通 り,年齢が増えるほど急発進・急ブレーキ発生回数が多いことが分かる.後期高齢者の急発 進・急ブレーキ発生回数は,前期高齢者の 1.5 倍,中高年の 3.5 倍であった. 図 2.6 年齢層ごとのイベント記録数の平均値(回/1000km) 2.3 安全態度に関するアンケート調査データ
本研究では,安全態度の指標として,衝動性-感覚追及(Impulsive-Sensation Seeking, ImpSS と略)指標を活用した.この尺度での高得点者は,物事を行うに当たり,計画性がなく,深く 考えずに行動する傾向が強い.ImpSS 尺度は,危険運転などの危険な行動を確認する上で重 要な役割を果たしている(Zuckerman and Aluja, 2015).ImpSS は全 19 項目の質問で構成され, 「衝動性」(IMP)(計画的ではなく衝動的に行動しやすい)と「感覚追及」(SS)(危険なこと をしたがる)の 2 つの下位尺度に分けられる. 本研究では,名古屋大学高齢者データベースの参加者を対象に,2020 年 6 月に安全態度に関 するアンケート調査を実施した.質問項目の日本語訳は塩見ら(1996)を参考にして高齢者 に伝わりやすい文言で作成した.応答形式は 1-4 の Likert 尺度(1=まったくそう思わない、4 =非常にそう思う)を適用した.DR 実験参加者の 85 名のうち,74 名から回答があった. 主成分分析の結果,各年齢層の IMP と SS の平均スコアを表 2.2 に示す.各年齢層の平均ス コアより,中高年は感覚追及の傾向が最も高い反面高齢者に比べ衝動的ではないことが分か る.一方,前期高齢者は感覚追及の傾向は低いが,計画的ではなく衝動的に行動する傾向が最 も高い.後期高齢者は前期高齢者に比べ,感覚追及性はほぼ変わらないが,衝動的ではない. 50-64 65-74 75-
12/30 表 2.2 年齢層別の SS と IMP 尺度の平均スコア 中高年 前期高齢者 後期高齢者 SS 18.44 17.92 18.08 IMP -0.30 0.37 -0.05 もう一つの社会心理学的評価指標として,心理的運転目的尺度(Psychosocial Purpose of Driving Scale, PSPD と略)が用いられた.PSPD 尺度は若者の危険運転行動の研究のために良 く使われる尺度である(Tseng,2013; Scott-Parker et al.,2015).PSPD 尺度は 7 項目の質問で構成 されている.本研究では,高齢者の危険運転においても心理的要因が多く関係すると考え, 同様の調査項目を適用した.ImpSS 尺度と同じく 1 から 4 までの Likert 尺度(1 =まったくそ う思わない,4 =非常にそう思う)が用いられた.各項目の年齢層ごとの平均スコアを表 2.3 に示す.すべての年齢層の最大の運転目的は同じで,家族・友人・知人と簡単に会えること だった.しかし,第1から第 3、第 5 の項目において,高齢者は中高年より高得点を示し,自 立や若く健康的であることを感じるための心理的運転目的が強い傾向を示している. 表 2.3 年齢層ごとの PSPD 各項目の平均スコア あなたが運転する理由は 中高年 前期高齢者 後期高齢者 1.自由であると感じるから 2.28 2.64 2.57 2.自立していると感じるから 2.14 2.38 2.64 3.まだまだ若いと感じるから 2.00 2.31 2.29 4.リラックスできるから 2.50 2.64 2.50 5.元気であると感じるから 2.36 2.76 2.93 6.ステータスを感じるから 2.14 2.11 2.14 7.簡単に家族・友人・知人を訪問すること ができるから 3.21 3.08 3.21
13/30
第 3 章
長期観測運転データの加工処理
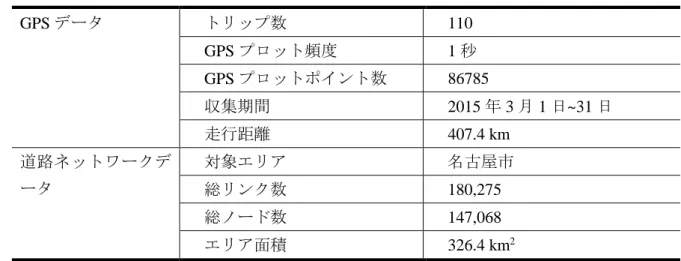
3.1 ドライブレコーダーによる観測データの特徴 本研究で用いられた DR による運転行動観測データは,GPS センサーによりタイムスタン プ、速度、加速度、車両の GPS 位置、イベントが 1 秒の頻度で記録されている.走行経路特 性などを分析するため,走行中の車両位置を示す GPS データをデジタル道路マップ(Digital Road Map, DRM と略)上にマップマッチングする必要がある.表 3.1 で示した通り,DR 運転 行動データは 85 名の運転者に対して長期間観測され,名古屋市を中心とした広範囲に渡る膨 大なデータ量である.このデータをマップマッチング処理するには,高精度かつ高速のマッ プマッチングアルゴリズムが必要とされる. 表 3.1 DR 運転行動データの概要 データ量 被験者数 85 名 収集期間 2015 年 3 月~2019 年 3 月 総トリップ数 226,597 総走行距離 11,135,945km ファイルサイズ 22.4GB 3.2 運転特性分析のためのマップマッチング処理 一般的に,マップマッチングアルゴリズムは,一度に処理する GPS プロットポイント範囲 に基づいて,グローバルアルゴリズムとローカルアルゴリズムのふたつに分類できる.ロー カルアルゴリズムは、GPS ポイントごとに道路ネットワーク上で最適なリンクを識別する. 最も処理速度が速いアルゴリズムは,各 GPS プロットを単純に投影距離が一番短いリンクへ マッチングする Snap-to-nearest であるが,間違ったリンクへマッチングされたり,リンクが途 切れて走行経路を構成できなかったりなどマッチング精度が低い問題がある.マッチング精 度を改善するために開発されたのが,Brakatsoulas et al. (2005)が提案した Incremental map-matching (IMM)アルゴリズムである.このアルゴリズムは,距離だけではなく方向性なども考 慮したスコア関数を用いて,各 GPS プロットの最適リンクを決定するため,Snap-to-nearest よ り精度は高いが処理時間はその分長くかかる. GPS プロットポイントを一個ずつ順番に処理 するローカルアルゴリズムに比べ,グローバルアルゴリズムは 1 回の計算処理で GPS 軌道全 体の最適な経路パスを識別する.最も良く使われているのが Hidden Markov Map-Matching (HMM)アルゴリズムである.HMM アルゴリズムは Newson and Krumm (2009)が GPS エラー によるノイズや sparseness を解決するため提案後,改良を重ね実用性が高められてきた.只, 複雑な計算過程を伴うため処理時間が長く,高頻度広範囲の GPS データの処理には適してい ない.計算時間を短縮するために Zhu et al.(2017)は longest common subsequence (LCS)法を適 用して,GPS 軌跡と対応する最短経路間の類似性を評価する trajectory segmentation (TS)アル14/30 ゴリズムを提案した.この手法は通常の HMM よりは処理時間が短縮されるが,実際の走行 経路が最短経路から離れるほど処理時間が長くなるデメリットがある.このように,グロー バルアルゴリズムは精度が高いが計算処理時間が長い,ローカルアルゴリズムは計算処理時 間が速いが精度が低いとジレンマが存在する.本研究のような膨大なデータを高速かつ高精 度に処理したい場合には両方のアルゴリズムとも限界があった. 従って,本研究では大規模な GPS データを高精度かつ効率的に処理することを目的とし, ローカルとグローバルアルゴリズムを融合した新しいマップマッチングアルゴリズム,グロ ーカルアルゴリズム(Glocal Map-Matching)を開発した.本アルゴリズムは,ローカルアルゴ リズムの処理速度を保ちながら,グローバルアルゴリズムを超える精度を達成できる. 図 3.1 で新しく開発したグローカルアルゴリズムのフレームワークを示す. 図 3.1 グローカルマップマッチングアルゴリズムのフレームワーク 本アルゴリズムの有効性を検証するため,本研究では表 3.2 で示したように 1 ユーザーの 一か月間の GPS データを用いて,従来のマップマッチングアルゴリズムと比較した.
1) Process local map-matching algorithm
2) Identify mis-matching error links by connectivity rules
3) Remove segments containing mismatching links
4) Replace removed segments with new paths by LCS similarity score
Calculate LCS similarity score between the shortest path and GPS trajectory Identify the shortest path between two consecutive segments
Similarity score > Threshold
Restore one of the removed links
Replace removed segments with the identified shortest paths
No
15/30 表 3.2 検証に用いた GPS データと道路ネットワーク概要 GPS データ トリップ数 110 GPS プロット頻度 1 秒 GPS プロットポイント数 86785 収集期間 2015 年 3 月 1 日~31 日 走行距離 407.4 km 道路ネットワークデ ータ 対象エリア 名古屋市 総リンク数 180,275 総ノード数 147,068 エリア面積 326.4 km2
検証結果を以下の表 3.3 で示す.このケーススタディは、Intel Quadcore i7-7700T CPU 2.90GHz 及び 16GB RAM を搭載したシングルプロセッサーの Windows10 環境で実行された ものである.
表 3.3 マップマッチングアルゴリズムの比較検証 Type
Algorithm Error rate per trip
Error rate per meter Running time (sec/point) Global HMM 8.06% 6.42% 0.507 TS 8.64% 7.92% 0.158 Local Snap-to-nearest 43.50% 44.62% 0.077 IMM 8.31% 7.38% 0.090
Glocal Proposed algorithm based on
snap-to-nearest 5.64% 4.17% 0.078 Proposed algorithm based on
IMM 4.11% 2.01% 0.091 表 3.3 に示したように,従来の HMM アルゴリズムは高い精度を持っているが,計算時間 が最も長く,高頻度広範囲の膨大なデータ量を持つ GPS データには適していない.TS アル ゴリズムは,計算処理時間を短縮できるように改善されたグローバルアルゴリズムであり, HMM よりは処理速度が速いが精度はローカルアルゴリズムである IMM よりも低い場合があ る.一方,本研究で開発したグローカルアルゴリズムは,ローカルマップマッチングプロセ スにおいて,ミスマッチングの問題を改善するのに非常に効率的で,計算処理時間を HMM と TS より大幅に短縮した同時に,精度も上記のすべてのアルゴリズムより高い.更に,Snap-to-nearest と IMM に比べても,計算処理時間はごくわずか増える程度である.最も単純なア ルゴリズムである Snap-to-nearest に適用した場合でも,高い精度に達することができる.従っ て,グローカルアルゴリズムは高頻度広範囲の大規模な GPS データの処理に最も適すること が検証された.
16/30
第 4 章
運転行動階層モデルに基づく安全態度と運転計画の関係性
分析
4.1 運転行動階層モデルの概要 運転行動階層モデルはフィンランドの倫理学者ケスキネンにより提案され,欧州における 運転者教育に用いられたモデルであり,近年関心が寄せられている.以下の図 4.1 でその構造 を示す.どのような運転でも,まずはこのモデルの最も下の階層にある「L1 運転操作」から 始まる.例えば,車両の速度や方向のコントロール、狭い路地や緊急時の対応など車両を上 手に操作できるスキルがなければならない.次は「L2 交通状況認識」レベルであり,信号状 況、他車や歩行者など周囲の交通状況を如何に正しく認識し,数秒先の状況を予測しつつ適 切な判断ができる能力である.この二階層は従来の運転支援に関する研究における「認知・ 判断・操作」の過程と一致し,本研究では,危険運転行動として一つの階層にまとめて考え る.この二つの階層は車両挙動に直接関係があるが,次の三つ目の階層は「運転計画」であ り,車両を運転する前の段階の能力が問われる.通常人々がいろいろな交通状況に遭遇する のは,ある時間にある場所へある目的を持って移動するからである.そのため,いつ運転す るか、どのルートを通っていくか、急いでいるか余裕を持っているか、天候や交通渋滞にど う対処するべきかなどを計画するのがこの段階の能力である.これにより,どのような状況 を選択するかが決まり,安全運転するか速度を上げるかなど下の二階層へ結びつく車両の使 用行動が決まる.但し,この階層が一番上位の意思決定階層ではない.最上位の意思決定能 力は,「L4 人生の目標と生活スキル」であり,リスキーな行動に対する意思決定に直接関係付 けられることから,本研究では「安全態度」と呼ぶ.安全と効率(もしくはリスク)のどちら に重きを置くか,個人の価値と人生の目標をどこに置くか、運転の意味とその行動をどう考 えるかなど運転そのものだけではなく,人生全般に対する態度が下の階層の「運転計画」能 力を影響する.何よりも安全を重視する態度の持ち主であれば,通常安全走行が可能なルー トと時間帯で走行する計画を立てるが,冒険好きな人であれば,無理なスケジュールで知ら ない道を通るかもしれない.ケスキネンの運転階層モデルは運転者教育のために用いられ, 運転に関する「知識とスキル」だけではなく,「運転計画」と「安全態度」という上位の階層 まで意識し,自身の「リスク増大要因」を把握することでリスキーな運転を避けることを図 っており、現在では世界中の運転者教育に影響を与えている.但し,これらの四階層の上位 階層から下位階層までの関係性を定量的に測った研究は今までない.特に,最上位の安全態 度と最下位の危険運転の関係については,交通心理学的アプローチで分析した研究事例はあ るが,中間段階の運転計画との関係性に関する研究は筆者らが知る限りない.17/30 図 4.1 運転行動階層モデルの概要 本研究では,以下図 4.2 のようなフレームワークで「安全態度」、「運転計画」と「危険運 転」の関係性を定量的に測ることを目的とする.特に,高齢運転者は,加齢に伴い視力や精 神運動機能は低下していくが,年齢と一律比例するよりは,個人間の差異が大きい.そのた め,個人の安全態度、加齢に伴う身体機能の低下などに応じて,本人に自覚して頂き,個々 の特性に応じた安全運転計画を個別・具体的に指導することが有意義である.本研究では社 会心理測定質問紙によるアンケート調査より安全態度を測り,人間特性データベースより個 人属性と身体機能に関するデータを整備し,ドライブレコーダーによる運転記録データから 一人一人の運転計画性と危険運転行動を測る.今年度は本研究の初期段階として,上位二階 層である「安全態度」と「運転計画」との関係性を重点的に分析した.以下で分析結果を示 す. 図 4.2 本研究のモデリングフレームワーク 安全態度 Risk attitude 危険運転 Risky driving 運転計画 Driving Plan DR データ 人間特性データ 社会心理データ 今年度の分析対象
18/30 4.2 安全態度と走行距離の関係性分析 運転計画の一つの代表的な指標として,日々の走行距離がある.高齢運転者は中高年の人 により走行距離が短くなるが,走行距離当たりの事故件数は加齢に伴い増加傾向であり,後 期高齢になると急増するというデータが観測されている.そのため,走行距離が長い高齢運 転者ほど、交通事故に出会う可能性が高くなる.従って,本研究では,分析の第一歩として, 年齢などの個人属性、健康状態と安全態度が1日当たりの走行距離に及ぼす影響を生存モデル により分析した.走行距離の時間的変動が考慮できるようパネル分析を行うため,2年以上DR 実験に参加された方を対象とし,直近2年間のデータを分析に用いた.その結果,総観測日数 は21839日、参加者数は73名であった。表4.1で分析に用いたデータの基礎集計を示す. 表 4.1 生存モデル分析に用いたデータの基礎集計
Variable Mean (or %) Minimum Maximum Young-old group (1 for aged from 65 to 74, 0
otherwise) 50.7% 0 1
Old-old group (1 for aged from 75, 0 otherwise) 30.1% 0 1 Gender (1 for male, 0 otherwise) 62% 0 1 Driving experience (years) 48.5 24 62 Education experience (years) 13.5 8 18 Minimum temperature (°C) 13.0 -4.8 29 Precipitation (mm) 4.4 0 170 Trail Making Test Score (TMT-B/A) 2.8 1.2 5.5 Mini-Mental State Examination (MMSE) 28.6 22 30 Visual acuity during daytime 0.8 0.1 1.6 Sensation seeking group score 17.9 9.3 25.4 Impulsive group score 0.1 -2.7 3.7 Psychosocial purpose of driving scale 11.8 5.2 17.7
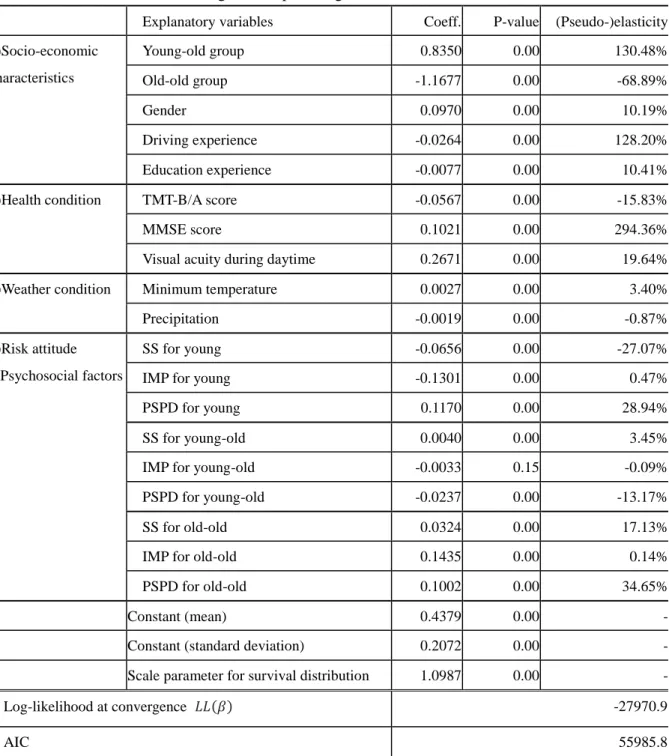
生存モデルとしては,log-logistic duration, log-normal duration, Weibull durationモデルが検討 され,その結果log-normal durationモデルが最も高い適合度を示した.その推定結果を表4.2 で示す.
19/30
表 4.2 log-normal panel regression モデルの推定結果
Explanatory variables Coeff. P-value (Pseudo-)elasticity 1)Socio-economic characteristics Young-old group 0.8350 0.00 130.48% Old-old group -1.1677 0.00 -68.89% Gender 0.0970 0.00 10.19% Driving experience -0.0264 0.00 128.20% Education experience -0.0077 0.00 10.41% 2)Health condition TMT-B/A score -0.0567 0.00 -15.83%
MMSE score 0.1021 0.00 294.36%
Visual acuity during daytime 0.2671 0.00 19.64% 3)Weather condition Minimum temperature 0.0027 0.00 3.40%
Precipitation -0.0019 0.00 -0.87%
4)Risk attitude &Psychosocial factors
SS for young -0.0656 0.00 -27.07%
IMP for young -0.1301 0.00 0.47%
PSPD for young 0.1170 0.00 28.94%
SS for young-old 0.0040 0.00 3.45%
IMP for young-old -0.0033 0.15 -0.09%
PSPD for young-old -0.0237 0.00 -13.17%
SS for old-old 0.0324 0.00 17.13%
IMP for old-old 0.1435 0.00 0.14%
PSPD for old-old 0.1002 0.00 34.65%
Constant (mean) 0.4379 0.00 -
Constant (standard deviation) 0.2072 0.00 - Scale parameter for survival distribution
(𝜎) 1.0987 0.00 - Log-likelihood at convergence 𝐿𝐿(𝛽) -27970.9 AIC 55985.8 推定結果より以下のようなことが分かる. 1) 個人属性の影響 個人属性において,年齢,性別,運転経験と教育年数が走行距離に大きい影響を及ぼすこ とが確認された.ほかの変数に比べて,性別と教育年数は低い弾力性を見せており,影響 が比較的小さいことが分かる.性別においては,男性運転者が女性運転者より長い距離 を運転する傾向を示す.年齢層の違いにおいては,前期高齢者は中高年の人より走行距 離が長く,後期高齢になると走行距離が著しく短くなることが確認された.前期高齢と 後期高齢に分けることで,高齢運転者は一貫して走行距離が短くなることではないこと が分かった.走行距離が短くなるのは後期高齢に入ってからであり,前期高齢の場合は
20/30 逆に長距離運転を好む傾向が見られる.これは退職などにより自由時間が増えたことが 関係すると思われる.加齢に伴う身体能力の低下は運転能力に影響を及ぼす可能性があ るため,今までより運転距離が長くなりがちの前期高齢者に対する充分な注意喚起も必 要だろう. 2) 健康状態の影響 健康状態については,昼間視力、TMT-B/A スコアと MMSE スコアが用いられた.昼間視 力は走行距離に有意にポジティブな影響を与えることが確認された.視力の変化は運転 能力だけでなく,その他の生活活動にも影響を与えるため,視力に自信があるとよりア クティブに活動でき,運転機会と意欲も高まる可能性がある.これは,高齢者が運転免許 を取得または更新する際,視力検査は重要であることを示唆している.TMT は精神運動 速度を測る指標であり,TMT-B/A スコアが低いほど,視覚探索、スキャン、柔軟性、実 行機能のパフォーマンスが高く,処理速度が速いことを示す.従って,TMT-B/A スコア の係数が負の値で有意なのは,加齢とともに精神運動速度能力が衰退することが長時間 の運転を妨げる可能性があることを示唆している.一方,MMSE スコアは高いほど認知 精神状態が良好であることを示す.MMSE スコアの係数はすべての連続変数の中で最大 の弾力性を示した.視力と認知機能の低下は年齢と大きく関係しているとされる.モデ ルの推定結果は,視力と認知機能が低いほど走行距離が短いことを示しており,加齢と 伴い高齢運転者は運転能力の低下を意識し,危険運転を避けるための代償的な戦略とし て走行距離を減らす行動を取っている可能性がある. 3) 気象状況の影響 気象状況においては,最低気温と降水量両方とも有意に推定され,それぞれの Pseudo-elasticity 値はほかの変数に比べては大きくないが,最低気温が高いほど走行距離が長く なり,雨量が多いほど走行距離が短くなることが確認された. 4) 安全態度を含む社会心理的要因の影響 安全態度と社会心理的運転目的においては,前期高齢者の IMP スコアは有意ではなかっ たが,その他の変数はすべて有意な結果を示した.SS、IMP、及び PSPD スコアは、各年 齢層に異なる影響を与える.SS 尺度は変化や未知性を好む感覚追求性を評価する指標で, IMP 尺度は考えたり計画したりせずに行動する衝動性を評価する指標である.中高年運 転者において,SS と IMP 両方ともマイナスの影響が確認され,感覚追求と衝動的な傾向 が走行距離の増加にはつながらないことが分かる.しかし,後期高齢運転者においては, 両方ともポジティブな影響が確認され,後期高齢運転者の運転行動は心理的要因の影響 が大きいことが分かる.既存研究は ImpSS 尺度が高いほど危険運転を招きやすい結果を 示しており,衝動的で計画性が欠けるほど長距離を運転しやすい後期高齢運転者に対し ては,適切な運転計画を立てるよう指導することが重要であるだろう.前期高齢運転者 に対しては,SS 尺度がポジティブな影響を与えており,感覚追求傾向が高いほど長距離 を運転しやすく,充分な注意喚起が必要であろう.社会心理的運転目的を測る PSPD は スコアが高いほど危険運転行動を招きやすい研究結果がある(Scott-Parker et al., 2015). 本研究で,PSPD はすべての年齢層において有意であるが,前期高齢運転者に対しては影 響が小さく,負の影響を与えていた.中高年運転者と後期高齢運転者に対しては,有意で
21/30 ポジティブな値であり,彼らは社会心理的目的により運転を好む傾向があることを示し ている.表 2.3 に示すように、後期高齢者は,「自立していると感じられる」と「元気で あると感じられる」がほかの年齢層に比べ高いスコアを持っており,彼らの自立性を証 明するための心理的目的が運転を促すような影響を及ぼすことが考えられる. 4.3 安全態度と運転計画の関係性分析 以上の分析により,安全態度と社会心理的運転目的などが高齢運転者の走行距離に大きい 影響を与えることが分かる.運転計画には,走行距離のほか,走行時間帯、走行経路など多 様な要素が考えられる.本研究では,高齢運転者が危険に巻き込まれやすい状況をあらわせ る運転計画に着目して分析を行う. 高齢運転者が起こしやすい事故としては,注意や情報処理能力の低下により,交差点での 出会い頭や右折時の事故が最も多い.特に信号制御がない細街路の交差点において,一時不 停止や安全未確認、夜間消灯などの原因による事故が多発し,出会い頭事故の 65%を示す(松 浦常夫(著)高齢運転者の安全心理学,2017).表 4.3 にて高齢運転者が起こしやすい事故類 型、事故多発場所とその原因をまとめる.これらの事故多発場所と人為的原因から,走行時 間帯、走行経路、通過道路の道幅、走行時の天候などが危険運転につながることが分かる. 高齢運転者の日々の運転行動において,このような危険状況を避けるような運転計画を立て ることによって事故の発生を事前防止できると考えられる.本研究では,この点に着目し, 運転行動観測データからそれぞれの高齢運転者の走行時間帯、走行経路、通過道路の特徴な どの運転計画特性データを抽出して,安全態度と運転計画との関係性を分析した. 表 4.3 高齢運転者が起こしやすい事故と原因 多発事故類型 多発場所 人為的原因 交 差 点 で の 出 会 い 頭 事故や右折時の事故 出会い頭事故が 3 割で一番多 く,信号機のない交差点での 事故が 65% 注意や情報処理能力の低下による 一時不停止、安全不確認、夜間消 灯など 歩行者・自転車との事 故 道路幅員 9.0m 未満の道路で の歩行者との事故が多い 夜間の事故が多い 視覚機能の低下 その他 細街路での事故 自宅周辺の狭い範囲の走行が多い 夜間、雨、雪などの悪天候 危険状況での対応が困難 運転計画性をあらわす変数として,走行経路特性、走行時間帯特性と走行距離特性の三つ の指標が用いられた.DR データの対象者 85 名のうち,74 名から安全態度に関するアンケー ト調査結果が得られた.ここでは,これらの 74 名のデータを持って安全態度と運転計画との 関係性を分析する.以下の表 4.4 にて得られた変数の概要を示す.ここで,細街路は道路幅が 3.0m~5.5m の道路を対象とする.朝ピークは 7:00~10:00、夕ピークは 16:00~20:00、夜間は 20:00~5:00 の時間帯として定義する.走行距離の分布図より,中距離トリップは 5 ㎞以上 10 ㎞未満、長距離トリップは 10 ㎞以上と定義した.
22/30 表 4.4 運転計画性をあらわす変数の概要 変数 意味 最小値 最大値 標準偏差 走行経路特 性 Route choice characteristics 左折頻度
Left turn frequency
交差点での左折頻度 (回/走行キロ)
0.28 3.29 0.36
右折頻度
Right turn frequency
交差点での右折頻度 (回/走行キロ) 0.22 3.34 0.35 細街路走行率 Minor road frequency 総走行距離における 細街路走行距離の割 合 2.5% 60.9% 7.4% 走行時間帯 特性 driving time characteristics 朝ピーク時走行率 Ratio of morning peak driving time
総走行時間における 朝ピーク時走行時間 の割合 3.6% 47.1% 9.2% 夕ピーク時走行率 Ratio of evening peak hour driving time 総走行時間における 夕ピーク時走行時間 の割合 0.8% 40.3% 9.0% 夜間走行率
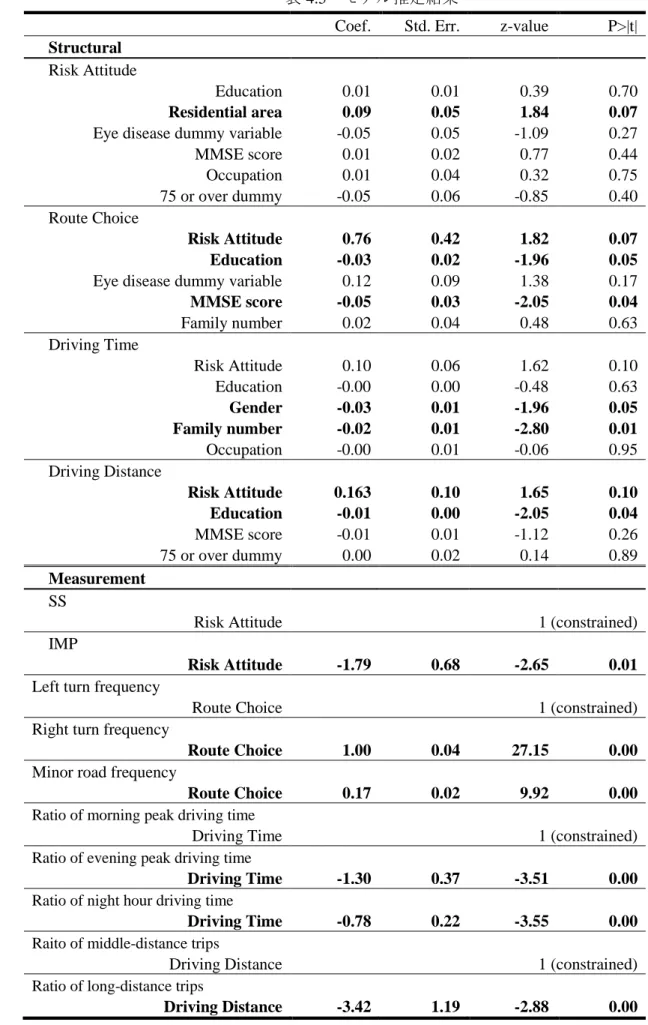
Ratio of night hour driving time 総走行時間における 夜間走行時間の割合 0.0% 23.1% 5.1% 走 行 距 離 特 性 driving distance characteristics 中距離トリップ率 Raito of middle-distance trips 総トリップ数におけ る中距離トリップの 割合 4.9% 52.1% 10.5% 長距離トリップ率 Ratio of long-distance trips 総トリップ数におけ る長距離トリップの 割合 3.2% 84.5% 23.9% 本研究では,以下の図 4.3 に示したような共分散構造分析モデリングを用いて,個人属性、 安全態度と運転計画の関係性を分析する.安全態度は、SS と IMP 二つの尺度でモデルの推定 結果を表 4.5 に示す.推定結果より以下のことが分かる. 1) 走行経路特性と安全態度、個人属性の関係 安全態度は経路選択行動にポジティブな影響が確認され,感覚追及や衝動的ほど右左 折率が高い経路または細街路など事故リスクが高い経路を選択する傾向を示す.個人 属性においては,学歴と MMSE スコアが有意に負の影響を与えることつまり,学歴が 高いほど危険な経路を選択しにくい傾向,認知機能が高いほど危険経路を選択しない 傾向が見られる. 2) 走行時間帯特性と安全態度、個人属性の関係 安全態度と走行時間帯特性とは有意な関係性が見つからなかった.個人属性において は,性別と家族人数が有意に負の影響を与えている.男性は女性より朝ピーク時の走
23/30 行は少ないが夕ピーク時や夜間の走行が多い傾向,家族がいるほど夕ピーク時や夜間 の走行が多い傾向が分かる. 3) 走行距離特性と安全態度、個人属性の関係 安全態度は走行距離特性にポジティブな影響を示しているが,10%の有意水準に留ま ってあり,更なる分析が必要である.個人属性においては,学歴が高いほど走行距離特 性に負の影響を与えており,中距離のトリップは少ないが長距離トリップは多い傾向 を示す. 図 4.3 安全態度と運転計画に関する共分散構造分析モデルフレームワーク X: Exogenous Formative Variables; Y: Endogenous Reflective Variables; 𝛈: Latent Variables
24/30
表 4.5 モデル推定結果
Coef. Std. Err. z-value P>|t|
Structural
Risk Attitude
Education 0.01 0.01 0.39 0.70
Residential area 0.09 0.05 1.84 0.07
Eye disease dummy variable -0.05 0.05 -1.09 0.27 MMSE score 0.01 0.02 0.77 0.44 Occupation 0.01 0.04 0.32 0.75 75 or over dummy -0.05 0.06 -0.85 0.40 Route Choice Risk Attitude 0.76 0.42 1.82 0.07 Education -0.03 0.02 -1.96 0.05
Eye disease dummy variable 0.12 0.09 1.38 0.17
MMSE score -0.05 0.03 -2.05 0.04 Family number 0.02 0.04 0.48 0.63 Driving Time Risk Attitude 0.10 0.06 1.62 0.10 Education -0.00 0.00 -0.48 0.63 Gender -0.03 0.01 -1.96 0.05 Family number -0.02 0.01 -2.80 0.01 Occupation -0.00 0.01 -0.06 0.95 Driving Distance Risk Attitude 0.163 0.10 1.65 0.10 Education -0.01 0.00 -2.05 0.04 MMSE score -0.01 0.01 -1.12 0.26 75 or over dummy 0.00 0.02 0.14 0.89 Measurement SS
Risk Attitude 1 (constrained)
IMP
Risk Attitude -1.79 0.68 -2.65 0.01
Left turn frequency
Route Choice 1 (constrained) Right turn frequency
Route Choice 1.00 0.04 27.15 0.00
Minor road frequency
Route Choice 0.17 0.02 9.92 0.00
Ratio of morning peak driving time
Driving Time 1 (constrained) Ratio of evening peak driving time
Driving Time -1.30 0.37 -3.51 0.00
Ratio of night hour driving time
Driving Time -0.78 0.22 -3.55 0.00
Raito of middle-distance trips
Driving Distance 1 (constrained) Ratio of long-distance trips
25/30 4.4 分析結果 本章では,ケスキネンの運転行動階層モデルに基づき,上位の二階層である安全態度と運 転計画の関係性を分析した.運転計画特性は多様な特性を持っているため,先ずは走行距離 特性に着目して,生存モデルによる回帰分析を行った.その結果,個人属性、健康状態、天候 などの物理的環境、安全態度と社会心理学運転目的などが走行距離に大きな影響を与えてい ることが確認された.そして,それぞれが走行距離に対する影響を定量的に測ることで,ど のような人がどのような状況下でどれぐらい走行距離が長くなるかを把握できる.高齢者に おいては,走行距離当たりの事故率が加齢に伴い増加する傾向があるため,走行距離が長く なりがちな人に対しては,走行距離を短縮できるような運転計画を提案することで,交通事 故リスクを減らせると考えられる. 次に,走行距離以外の運転計画特性も含めて,安全態度との関係性を分析した.高齢者の 事故が発生しやすい場所や原因などを踏まえ,右左折率と細街路走行率などの走行経路特性, ピーク時や夜間走行などの走行時間帯特性、走行距離特性などが運転計画特性として用いら れた.これらの運転計画特性と安全態度の関係性からリスクや冒険を好むほど右左折率が高 いまたは細街路などを走行しやすい傾向が見られた.高齢運転者の交通事故の多くが右折時 や細街路の交差点で発生するため,上記のような方には安全に運転できる走行経路の案内が 欠かせないと考えられる.特に,前期高齢者は他の年齢層に比べ,計画立てて運転するより は衝動的に行動しやすいため,特に注意が必要だと思われる.
26/30
第 5 章
まとめと今後の課題
本研究では,名古屋大学 COI プロジェクトで収集された高齢者データベースにおける人間 特性データと長期観測運転データを用いて,高齢運転者の危険運転発生メカニズムに関する 分析を行った. 運転行動データの取得には,主に,質問紙による自己報告、ドライビングシミュレータ、 ドライブレコーダーがある.自己報告は主観的であるため信頼性が問われる.ドライビング シミュレータは限られた状況設定下での観測である上,被験者が実験的状況に応じた運転行 動を取る可能性があるため,普段の運転行動を反映しない可能性がある.ドライブレコーダ ーは日常の運転行動を常時測定することができるため,最も有効なデータ収集手法であると 言える.但し,ドライブレコーダーのデータは 1 秒単位で常時記録されたものであり,デー タ量が膨大である上,多様な情報が収録されており,分析に応じたデータの加工処理が必要 である.本研究で用いたドライブレコーダーデータは大規模なデータ量であったため,効率 的に処理できるよう新しいマップマッチングアルゴリズムを開発した.本アルゴリズムは既 存のアルゴリズムに比べ,処理時間を大幅に短縮できる上高い精度を達成できた.そのため, 本研究の分析だけではなく,大規模の GPS データ処理を必要とされる他の研究にも活用でき る. 本研究では,ケスキネンの運転行動階層モデルによる危険運転発生には安全態度と運転計 画という上位階層が関係しているという考え方の元で,安全態度と運転計画の関係性を分析 した.安全態度の指標としては,危険運転などの危険な行動を確認する上で重要な役割を果 たしている ImpSS 尺度が用いられた.ImpSS 尺度は海外での研究で若者のリスクテイキング 行動分析によく用いられたが,高齢運転者の危険運転行動分析に用いられたのは筆者らが知 る限り初めてである.高齢者を対象としたアンケート調査を実施した結果,前期高齢者と後 期高齢者は安全態度において異なる傾向を示した.前期高齢者は一般的に感覚追及の傾向は 低いが,計画的ではなく衝動的に行動する傾向が最も高い.一方,後期高齢者は前期高齢者 に比べ,感覚追及性はほぼ変わらないが衝動的ではない.但し,後期高齢者は中高年よりは 衝動的に行動しやすいことが分かった.そのため,高齢運転者は中高年より計画性が欠けて いる可能性があり,危険運転を避けるよう適切な運転計画を提案することに意味があると考 えられる. ケスキネンの運転行動階層モデルにおける運転計画特性は,運転者の教育プログラムのた めに用いられたコンセプトであり,定量的に測れる指標は今までなかった.本研究は初めて 運転計画概念を定量的に測ることを試みた研究である.ドライブレコーダーによる日々の運 転行動の記録データは運転計画特性を測るために有効なデータであると言える.本研究では, 高齢者の交通事故多発場所と原因を分析し,交通事故リスクが高い運転計画特性として,走 行経路特性、走行時間帯特性と走行距離特性を指標化した.生存モデル分析と共分散構造分 析により,安全態度とこれらの運転計画特性との関係性が確認された. 今後の課題としては,運転計画特性を現わす指標について,更なる追及が必要である.例27/30 えば,雨や雪などの悪天候下での走行距離や走行時間、高齢者が点灯を忘れがちの夕暮れや 夜明け時の走行など多様な状況が考えられる.これらの状況を洗い出し,最も有効な運転計 画指標を見つけ出すことが今後の課題としてあげられる.その上,本研究では運転行動階層 モデルの上位の二階層の関係性に留まったが,次の階層の危険運転行動まで結び付け,全階 層モデルを確立することが必要である.これにより,高齢運転者の安全に対する態度と運転 計画との関係およびそれらが交通事故に及ぼす影響について包括的な知見が得られることが 期待される.従って,運転行動の最上階である安全に対する意識の向上と,個人個人の運転 能力に適した安全な運転計画の案内などにより,高齢者の事故リスクを削減することに貢献 できる.更に,今後の展望としては,本研究の分析手法や知見を活用した社会的実装などの 検討が考えられる.例えば,現在最新の市販車両の一部では,車両の挙動等を通信機能によ って情報センターに収集する仕組みが標準装備となっており,今後はこのような仕組みを備 えた車種が増大するものと考えられる.その際に,本研究で構築する分析方法を用いること によって,走行中の自動車それぞれの危険運転行動の発生確率を把握し,交通事故を未然に 防ぐ対策を講じることが可能となる.
28/30 参考文献
[1] Zuckerman, M., Aluja, A. Measures of sensation seeking. In G. J. Boyle, D. H.470 Saklofske, G. Matthews (Eds.), Measures of personality and social psychological constructs, 352-380, Elsevier Academic Press, 2015.
[2] 塩見邦雄, David Michael Kuhlman, Marivin Zukerman, Jeffery A. Joireman, 佐藤睦子, 矢田真 士.「ZUCKERMAN-KUHLMAN PERSONALITY QUEST10NNAIRE」(ZKPQ)の日本版(J-ZKPQ)の妥当性と信頼性の検討, 兵庫教育大学研究紀要,Vol.16,1996.
[3] Scott-Parker, B., King, M.J., Watson, B. The psychosocial purpose of driving and its relationship with the risky driving behaviour of young novice drivers. Transp. Res. Part F Traffic Psychol. Behav. 33, 16–26, 2015.
[4] 松浦常夫(著), 高齢運転者の安全心理学,東京大学出版会,2017.
[5] Brakatsoulas, S., Pfoser, D., Salas, R., Wenk, C. On map-matching vehicle tracking data. In: Proceedings of the 31st International Conference on Very Large Data Bases, 30 August–2 September 2005, Trondheim, Norway, 853–864, 2005.
[6] Newson, P., Krumm, J. Hidden Markov Map Matching through Noise and Sparseness. In: Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, November 4–6 2009, Seattle, WA, 336–343, 2009.
[7] Zhu, L., Holden, J. R., Gonder, J. D. Trajectory Segmentation Map-Matching Approach for Large-Scale, High-Resolution GPS Data. Transportation Research Record, 2645(1), 67–75, 2017. [8] Hatakka, M., Keskinen, E., Gregersen, N.P., Glad, A., Hernetkoski, K. From control of the vehicle
to personal self-control; broadening the perspectives to driver education. Transp. Res. Part F Traffic Psychol. Behav. 5, 201–215, 2002.
[9] エスコ・ケスキネン.欧州における運転者教育の最近の傾向‐理論から実践へ,第 13 回 IATTS セミナー,2007.
29/30 付録
表1 安全態度に関するアンケート調査結果
項 目 SS/IMP 平均スコア 標準偏差 1 私はどのように新しい仕事を進めるか見通しを立 てずに始めるほうだ IMP 1.96 0.65 2 私はたいてい考えてから行動する IMP 2.89 0.71 3 私はよく衝動的に行動する IMP 2.27 0.62 4 先のことについて細かい計画を立てるのに時間を 費やすことはまれだ IMP 2.50 0.64 5 少し不安でも,新鮮な感覚や体験を求めるほうだ SS 2.55 0.70 6 やっかいな仕事を始める前に,念入りな計画を立 てるほうだ IMP 2.69 0.78 7 時間やルートを決めずに旅に出たいと思うことが ある SS 2.12 0.54 8 先の見えないような状況を楽しむほうだ SS 1.85 0.65 9 私はスリルを味わうために何かをするのが好きだ SS 1.99 0.72 10 私は頻繁に興味の対象を変えるほうだ SS 1.97 0.64 11 私は怖いもの見たさが強い方だ SS 1.88 0.74 12 何でも一度はやってみるほうだ SS 2.50 0.77 13 あっちこっちを旅する,変化や刺激に富んだ人生 を選びたい SS 2.35 0.69 14 私はたまに楽しみのためだけに奇想天外なことを する SS 1.78 0.79 15 道に迷うことが分かっていても,知らない街や町 はずれを一人で探索することが好きだ SS 2.01 0.69 16 私はびっくりさせてくれる友達が好きだ SS 1.91 0.65 17 新しいことによく夢中になって、あとで問題にな るかどうかをあまり考えない SS 2.11 0.64 18 私は衝動的な性格だ SS 2.09 0.74 19 はめをはずしたパーティーが好きだ SS 1.74 0.6530/30 表2 社会心理的運転目的 PSPD に関する調査結果 あなたが運転する理由は 平均スコア 標準偏差 1.自由であると感じるから 2.54 0.83 2.自立していると感じるから 2.36 0.77 3.まだまだ若いと感じるから 2.22 0.73 4.リラックスできるから 2.55 0.80 5.元気であると感じるから 2.66 0.75 6.ステータスを感じるから 2.09 0.72 7.簡単に家族・友人・知人を訪問することができるから 3.09 0.76