Title
骨組構造物の最適設計法に関する基礎的研究( 本文
(FULLTEXT) )
Author(s)
髙木, 録郎
Report No.(Doctoral
Degree)
博士(工学) 甲第007号
Issue Date
1995-03-24
Type
博士論文
Version
publisher
URL
http://hdl.handle.net/20.500.12099/1728
※この資料の著作権は、各資料の著者・学協会・出版社等に帰属します。
骨組構造物の最適設計法に関する基礎的研究
TAewetI'caJ
stL[dy
on aD OPtlhL[mdesli77
teCAD)'que fw
dame
stmctLTTleS平成7年1月
学位論文:博士(工学)/9雅一J
Theorett'cal
study
on an
optimum
desL'gn
technL'que
forframe
structures
by Rokuro Takagi Abstract
This paper describes a theoretical study on an optimum design technique
of frame structures under one restriction. Some effective methods are proposed and
evaluated through the application of numerical examples.
The folloyings are the theoretical characteristics of this technique.
(1)
The stiffness matrix s, can be expressed in the form of a triple squarematrix product S=CTDC ol both statically determinate and indeterminate
structure.
(2)
A variational problem is adopted yith regard to producing optimuJn Sections,which are mathematically treated as an extreme vallle using the Lagrange's
undefined coefficient method.
(3)
Mathematical technique used yith trace(matrix H)
is applied for the sum ofthe squares of stres?es
,and also applied directly to achieved the inverse
sum of the eigenvalues by the flexibility matrix SJl.
The present paper introduces three- optimum design techniques applying those characteristics. They are for the vibration problem, the buckling one and the
averaged stresses caused by the applied loads under the restriction, that the total weight of structural material should be kept constant.
Besides, the extended design method are proposed. One is the definition o† the
effective buckling length by using the inverse sum of eigenvalues. This Till improve the former length by lst order eigenvalⅦe. because of the eigenvalⅦes of low orders approximated to each other.
Another is to design the optimllm pre-Stressed loads of the cable-stayed bridge
or Nhylsen arch bridge. This applies the 皿etbod of the sum of the sqⅦares of
stresses.
It is demonstrated through numerical examples that the techniques presented are
論文趣旨
本研究は特定の拘束条件のもとに最適条件に沿った骨組構造物の部材断面を設計する手 法を確立するための基礎的研究である。その設計プロセスにおいていくつかの理論的な提 案を行うことと、その理論を用いた最適設計法を提案すること、さらに実務の設計にどの ような応用が可能であるかを模索研究することが中心となっている。 本研究の目的は提案する設計手法が実務設計で十分に適用可能であること、提案するい くつかの行列演算の数学的な手法が超大型計算機でなく小型計算機(EWS程度)程度の 処理能力によっても解の収束性に寄与することを明らかにすることであるc 本論文の内容は橋梁や建築物で適用される平面骨組構造物を対象として、振動、座屈、 および応力度に対して構造物が最大荷重に抵抗できることを目指した最適設計法の基礎理 論とそれを実務設計に応用したその評価が中心である。ここで展開、・提案される最適設計 法の理論はつぎの3つの個性的な特徴をもっている。 1)有限要素法のなかの狭義の変位法に根拠をおいて、骨組構造物の剛性行列が部材剛性を 表わす行列Dと部材の結合状態を表わす幾何学的形状行列Cとの3つの行列の積CTD Cに分解して表わされていること。さらに、幾何学的形状行列Cを静定、不静定いずれ の構造物に対しても正方行列化させること。 2)因数分解された正方行列の対角要素和から固有値解析を行わず固有値和、逆数和を求め る数学的手法を採用していること。 3)最適値を求めるためのアルゴリズムは数学的にはラグランジェの未定係数法による変分 極値問題として扱われていること。 これら理論が最適設計の主題である最適値への収束性の向上に役立つことを振動問題、 座屈問題および構造物の静的応力問題について取り上げる。そして、最適設計法として、 主構造の体積(重量)を一定とする拘束条件下における最適な部材断面を設計する手法を 紹介する。 振動問題では1次固有周期が卓越することに着目して、すべての固有周期の自乗和 (ETi2m,・n)を最小とすることで剛な構造物を設計することを目指している。座屈問題では低次の座屈固有値が近接することに着目して、すべて・の座屈固有値逆数和
(I(1/Ei)min)を最小とすることで座屈荷重最大になる構造物を設計することを目指し
ている。 さらに、静的応力問題では各部材に作用する応力度に着目して、応力度自乗和(EE(6ij2)min)を最小とすることで応力度が平均化する断面設計を目指している。
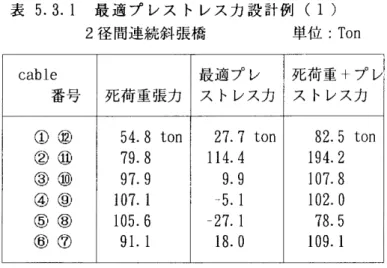
これら設計法の主流は道路橋示方書を適用して設計された設計断面に対して、これらの 最適条件によってどのような最適断面に修正可能かを模索するものである。 さらに、特徴となっている基本的な理論の応用として、 2例の独創的な応用例を示す。 第1例は固有倍達数和を求める手法の応用例である。これは座屈設計パラメータである有効座屈長を従来の1次固有値から求めることに対し、すべての固有値を考慮したその逆数 和から求めるものである。低次の座屈固有値が近接することに着目したものであり、いく つかの施工例からその安当性を評価している。第2例は紹介する設計法の拡張として静的 応力度の平均化設計法の実務的な応用である。これは斜張橋やニールセン橋のケーブル付 加張力(プレストレスカ)の設計に適用する。拘束条件に応力度を発生させる張力分布の 平均、分散が一定というあたかも統計的な考えを採用し、最適値を求める手法を紹介する。 斜張橋の断面力改善のための最適プレストレスカ設計やニールセン橋の施工時張力調整管 理に応用し、計算例の結果から基本的理論が実務設計にいかに有効かを評価する。
記号説明 P :外力行列 5 :変形法における剛性行列(SEは拡張された剛性行列) u :変位ベクトル C :剛性行列を積に因数分解した場合の部材結合状況を表す幾何学的形状行列 (CEは拡張された行列) CT :行列Cの転置行列 β :剛性行列を構に因数分解した場合の部材断面特性を表す行列(部材剛性行列) Ⅳ :材端カベクトル E :単位行列 Ⅳ
:質量行列
V :直交行列 H :座屈固有値を求めるための外力荷重による幾何剛性行列に相当する行列 △C :座屈による変形増分を考慮した幾何学的形状行列のCの増分行列 L :材端力表示のための係数行列(応力自乗和最小化のための応力行列用) A :小行列分解された幾何学的形状行列のうち、静定基本系部分の要素行列 B :同上のうち、不静足部材部分の要素行列 D。U :因数分解された剛性行列の静定基本系部分に対する要素行列 L D 同上のうち、不静定部材部分の要素行列 Q :幾何学的形状行列を正方化するための付加要素行列 R :同上 スi :振動固有値 1/Åi :振動固有値逆数、 ∑(1/スi) は同逆数和 E L :座屈固有値 1/Ei:座屈固有倍達数、 ∑(1/Ei)は同逆数和 ∑∑αii2:応力度自乗和 r :最適条件(目的関数) J :ラグランジェ関数 E :ラグランジェ関数におけるラグランジェ未定係数 Trace(良):正方行列βの対角要素和
骨組構造物の最適設計法に関する基礎的研究
Theoretical study on an optimum design technique
for frame structures
第1編 序論 第1章 まえがき 第2章 最適設計の研究の現状と本研究の概要 第3草 本論文の内容と構成 参考文献 第2編 基礎理論 第1章 基礎理論の概要 第2章 部材の釣り合いと剛性行列の因数表示 2.1一般的な部材の釣り合い 2.2 境界条件(一端ヒンジ、他端剛結の場合) 2.3 境界条件(両端ヒンジの場合) 第3章 要素行列の正方化と剛性行列の一般化 3.1 剛性行列の因数分解 3.2 剛性行列の一般化 3.3 不静定構造物に対する幾何学形状行列Cの小行列分解 3.4 剛性行列の因数分解の意義 3.5 仮想要素R、 Qの力学的意味 第4章 行列の対角和 4.1 固有値の逆数和と因数分解CTβCの意義 第5章 ラグランジェの未定係数法 5.1 ラグランジェの未定係数法による極値問題
参考文献
Page l 1 2 3 6 8 8 8 8 ll 12 12 12 13 14 15 15 17 17 19 19 20第3編 骨組構造物の最適断面設計への提案 第1章 骨組構造物の最適設計法の提案 第2章 固有周期自乗和最小とする最適設計法 2.1固有周期自乗和最小の意義 2.2 固有周期自乗和 2.3 ラグランジェの未定係数法による最適解 2.4 設計例 2.5 考察 第3章 応力度自乗和を最小とする最適設計法 3.1応力度自乗和の意義 3.2 応力度自乗和 3.3 ラグランジェの未定係数法による最適解 3.4 設計例 3.5 考察 第4章 座屈荷重逆数和を最小とする最適設計法
4.1座屈荷重逆数和の意義
4.2 座屈基本式の理論的展開 4.3 逆数和の工学的意義 4.4 有効接線弾性係数法 4.5 ラグランジェの未定係数法による最適解 4.6 設計例 4.7 考察 第5章 設計法比較 5.1 3つの手法による結果比較 5.2 考察 参考文献 第4編 最適設計手法の応用(1) 第1章 有効座屈長評価における固有倍達数和 1.1有効座屈長の評価の意義 1.2 固有値逆数和とその逆数との比較 第2章 逆数和を用いた有効座屈長 2.1座屈固有値とその逆数和を応用した有効座屈長 2.2 有効座屈長の比較 第3章 逆数和を用いた有効座屈長への評価参考文献
21 21 21 21 22 24 26 29 30 30 30 33 35 36 40 40 40 44 45 45 47 52 53 53 54 57 58 58 58 58 61 61 63 69 70第5編 最適設計手法の応用(2) 第1章 応力度自乗和最小化の意義 第2章 最適ケーブルプレストレスカの設計 2.1 はじめに 2.2 プレストレスカを外力とした部材応力度 2.3 最適プレストレスカの設計 第3章 斜張橋における最適ケーブルプレストレスカ設計への適用 3.1斜張橋種ケーブルの最適プレスとレスカ設計例(1) 3.2 斜張橋種ケーブルの最適プレスとレスカ設計例(2) 第4章
ニ-ルセン橋のケ-ブル張力の調整管理-の応用
第5章 実務設計への評価 参考文献 第6編 総論 第1草 本研究のまとめ 1.1 総論 1.2 本研究のまとめ 第2葦 今後の課題 2.1最適設計の研究の位置付け 2.2 今後の課題 図表一覧 本研究に関連する発表論文・口頭発表 謝 辞 72 72 72 72 73 75 78 78 79 83 89 90 91 91 91 91 92 92 93 94 96第順序論
第1章
まえがき 本論文をまとめるにあたり、個人的なことから始めることば気になるところであるが、 著者が最初に最適設計というものに係わったのはつぎのようなことである。 実務設計を長く経験したなかで、 8年ほど前に本格的なこ-ルセン橋の施工に関与して ケーブルの張力調整の管理プログラムを作成することになった。システムは現場測定を含 めた大掛かりなものであった。最適な調整張力を設計するプログラムはよく知られた線形 計画法に基づくものであったが、いろいろな誤差、施工上の制約、変数の多さなどから拘 束条件が多く計算収束に苦労した。これが最適設計法との本格的な出会いである。その後、 多くの手法が公表されるなかで独自の最適設計手法を模索して現在に至っている。 最適設計とは、構造上、施工上あるいは経済的な拘束条件という制約の範囲内で、与え られた最適条件に合致した最適な部材断面、荷重分布、部材配置などを設計するものであ る。その手法は構造解析と数学的手法(一般には数理計画法)の併用であり、最適な極値 を求めるにはコンピュータによる演算処能力の助けを借りることが主流を占める。最適設 計とは本論文で記述するような最適断面を求めるだけでない。実務設計では斜張橋のケー ブルプレストレスカの最適化、あるいはケーブル本数や配置の合理化、橋梁形式選定にお ける経済的な支間構成や部材形状の設計などの構造最適化が挙げられる。さちに工場製作 での最適な鋼板の板取寸法計画や生産計画も最適設計の一例である。こうした研究や設計 実例は理論とともに応用例が多く報告されている。 本研究は特定の拘束条件のもとに最適条件に沿った骨組構造物の部材断面を設計する手 法を主眼においた基礎的研究である。その設計プロセスにおいていくつかの理論的な提案 を行うことと、その理論を用いた最適設計法を提案するとともに実務の設計にどのような 応用が可能であるかを模索研究することが中心となっている。 本研究で提案する最適設計法にはいくつかの行列演算の数学的な手法が適用され、本研 究の特徴となっている。本設計法の基本的な思想は既に根拠ある道路橋示方書などを準用 して設計された主構造の体積(重量)を変えないで、設計荷重以上の荷重に耐え得る構造物-改善するための最適断面を設計することである。この観点からは最大荷重設計法と見
なされよう。そして、設計手法の提案とその適用に対しての安当性を記述する。さらに、
拡張応用例として、著者が冒頭で述べたように実務設計で苦労したニ-ルセン橋のケーブ ル調整管理手法に対して最適設計法を提案する。この手法には本研究の理論が応用されて いる。 本研究の目的は提案する設計手法が実務設計で十分に適用可能であること、さらに超 大型計算機でなく小型計算機(EWS程度)程度の処理能力によっても解の収束性は良好であることを明らかにする。
第2章
最適設計の研究の現状と本研究の概要
実務の土木設計に携わっていると、設計の最終的な成果の良否を永年の経験に判断させ ることが多い。結果が最適なものか、あるいはそれに近づいているものかを判断すること を経験という暖味な要素に頼り、科学的な根拠を欠いている部分がある。設計そのものは 経験を軽視することができないものであり、直感を重要視することが必要な場合がある。 一方で、科学的に判断する根拠を求める必要に迫られる場合も少なくないことも事実であ る。さらに構造物の大型化や複雑なものの出現により設計作業が経験で判断でき難くなっ てきたことと、処理能力の向上によって迅速かつ正確な設計が行われる風潮が一般化して きた。このため設計全体が科学的、総合的に行われる方向に向かってきているのは当然の 成り行きである。このような状況から最適設計法の概念が生まれ、設計工学の分野に科学 的判定が持ち込まれてきたのである。 最適設計の概念を最初に発表したのが1960年Schmit L.A.の論文(1)である。当時は電 子計算機による数値解析能力の急激な進歩という環境があって、有限要素法の概念が発表された時期と相まって、設計に従事する技術者や研究者には衝撃的な出来事であったと聞
く。その後、電子計算機の一層の発達、構造解析や解析法の発展によって最適設計法の研 究も机上の論議だけでなく実際の設計の分野まで大きく進展し、貢献している。 構造物の設計は多くの安全性の照査が必要であり、多くの独立の設計変数が仮定される。 最適設計は構造解析の繰り返しを含むので、設計変数が多いことは最適設計での目的関数、 拘束条件を複雑化している。この設計変数の増大は最適解への収束を低下させる。線形計 画法が適用できる場合は問題ないが、非線形計画法を適用する場合は解の収束性とその精 度は重要な問題である。このため、最適化手法としては数理計画設計法の占める割合は大 きい。 最適設計法の研究の変遷を記述すると、つぎのように分けられる。 この概念が発表された1960年代はいろいろな荷重条件下で応力、変形、座屈安定、振動 などに対する最適な構造設計をするための手段としていろいろな非線形数理計画法と構造 解析との併用という手法が用いられていた。しかし、大型電子計算機の発展途上でもあり、 電子計算機能力や実際の設計とのギャップがあり、実務設計には応用されず、机上の研究 域であった。 1970年代に入って、計算能力の向上から大型構造物への応用や設計変数の増大が問題に なり、最適値への収束性や計算時間が問題視されてきた。このため、最適値を求める手法 として非線形計画法に限界が明らかにされた。このため、構造物を間接的に保証する規準 (例えば、ひずみエネル-最小、全応力設計)が設けられ効率的な設計をすることを目指 した。設計変数の増大についても構造物を幾つかに分割して最適値を求める構造分割法と か多段階決定法が提案されたのもこの年代である。わが国での最適設計法の研究成果が初 めて発表されたのが70年代初頭(4)であり、その後、この70年代後半から、骨組構造物を 対象に多くの発表が見られる。例えば、文献3)が挙げられる。1980年代からは実務設計への応用の時代である。有限要素法と数理計画法の併用による
汎用プログラムの開発応用が行われ、信頼性の高い設計が造船、機嘩、自動車産業でなさ
れるようになってきた。 土木設計の分野に注目すると、最適設計法は初期段階では構造物の最小重量設計あるい は最大荷重設計という経済的かつ安全な設計を目指してきた(6)。 1980年代の応用の時代 には斜張橋のような高次不静定構造物の設計(7 10)や製作(11、12)、現場での管理システ ム(13\14)に最適設計法が適用されることが多くなってきた。特に斜張橋の構造選定、断 面設計に最適設計の研究課題として選ばれた時期があった。 最近の傾向は最適値を得る手法の変化である。一般的な数理計画法、離散型変数のため の数理計画法、さらに変数、関数が定量化されず、唆昧な形で表現される問題のためのファ ジー数理計画法が応用されている(14、15)。 本研究での最適設計法は最適に設計された部材断面が最大の荷重に耐えるようにする最 大荷重設計法であり、最適化手法はラグランジェの未定係数法による変分法である。手法 自身は古典的な手法で目新しいものでない。構造解析の手法に剛性行列の因数分解や拡張 した剛性行列の提案をしている。さらに、行列の対角要素和から固有値和を求める数学的 手法が提案され、両者が本研究の特徴として最適設計法の主題である最適値への収束性の 向上に役立つことを記述している。ここで記述する最適設計手法の基礎的な理論の特徴は 著者等の永年の研究成果である。さらに応用編として研究された内容(座屈逆数和を用い た有効座屈長、斜張橋最適ケーブルプレストレスカ)は本研究の理論を実務設計に応用し て正当性を論じる。そして、多くの最適設計の研究の中に一翼を期待したい内容としてい る。第3章
本論文の内容と構成
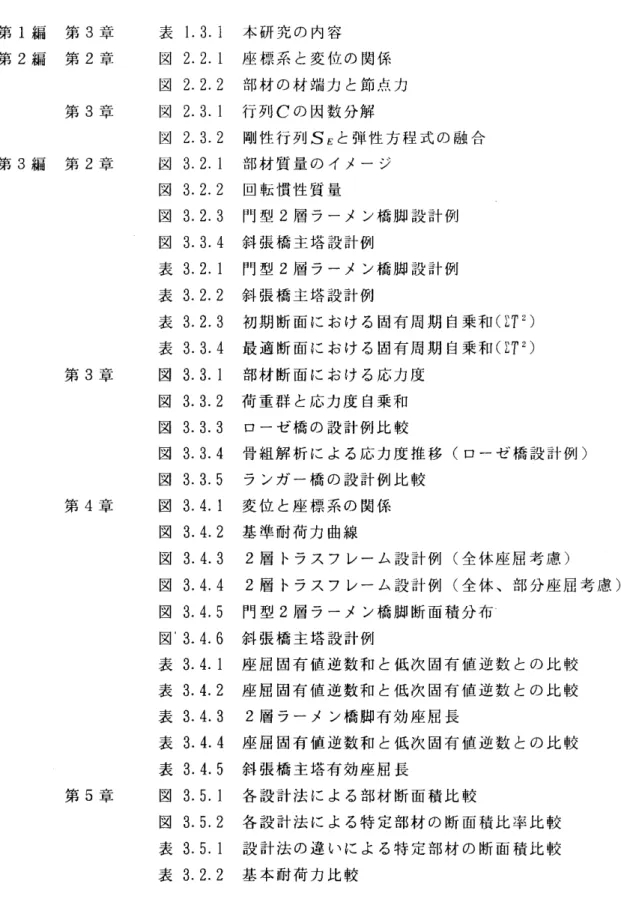
本論文の内容は橋梁や建築物で適用される平面骨組構造物を対象として、一定拘束条件 のもとで振動、座屈、応力度に対して最適な部材断面を求める設計手法についての基礎的 研究とその応用である(表1.3.1参照) 。すなわち、主たる内容は主構造の体積を一定 とした構造物が最大荷重に抵抗できることを目指した最適設計法の基礎理論とそれを実務 設計に応用したその評価が中心である。ここで展開される最適設計法の理論はつぎの3つ の個性的な特徴をもっている。 1)有限要素法のなかの狭義の変位法に根拠をおいて、骨組構造物の剛性行列が部材剛性を 表わす行列Dと部材の結合状態を表わす幾何学的形状行列Cとの3つの行列の積CTD Cに分解して表わしていること。さらに、幾何学的形状行列Cを静定、不静定いずれの 構造物に対しても正方行列化させること。 2)直交化された正方行列の対角要素和から固有値解析を行わず固有値和、逆数和を求める 数学的手法を採用していること。 3)最適値を求めるためのアルゴリズムはラグランジェの未定係数法による変分極値問題と して扱われていること。 そして、振動問題、座屈問題および構造物の静的応力問題を最適条件に取り上げ、拘束表1.3.1本研究の内容 設計法の主題(目的関数) 拘束条件 設計変数 編章 固有周期自乗和を最小化 ∑(Tie)min 構造物の総体積(重量) 一定 ∑(AiLi)-Wo 部材断面積Ai
i
第2編 第2章 応力度自乗和を最小化 ∑∑(oiik2)min 構造物の総体横(重量) 一定 ∑(AiLi)-Wo 部材断面積Ai 第2編 第3章 初期値と最適値との 最適 第5編残差自乗和一定
∑u(ATi-Tot)2-Ⅴ プレストレス力a)
座屈荷重逆数和最小化 ∑(1/PcRi)min 構造物の総体積(重量) 一定 ∑(AiLi)-Wo 部材断面積Ai 第2編 第4章 有効座屈長 第4編条件下での最適な部材断面を設計する手法を紹介する。 振動問題では1次固有周期が卓越することに着目し、すべての固有周期の自乗和
(∑Ti2min)を最小とすることで剛な構造物を設計することを目指している。座屈問題
では低次の座屈固有傾が近接することに着目して、すべての座屈固有値逆数和 (∑(1/EL)min)を最小とすることで座屈荷重最大になる構造物を設計することを目指し ている。さらに、静的応力問題では各部材に作用する最大応力度に着目して、応力度自乗 和(∑∑oii2)min)を最小とすることで応力度の平均化を促進する断面設計を目指して いる。 これら設計法の主流は道路橋示方書(以下、道示と呼称)に準じて設計された設計断面 に対して目的とする最適条件によってどのような最適断面に修正可能かを模索するもので ある。 さらに、特徴とする基本的な理論の応用として、 2例の独創的な応用例を示す。第1例 は固有値逆数和を求める方法の応用例である。第2例は紹介する設計法の拡張として静的 応力度の平均化設計法の実務的な応用である。そして、応用された結果から基本的理論が 実務設計に如何に有効かを評価する。 論文の構成は序論(第1編)を除いて5つの編で構成されている。その各編について記 述する。 第2編は本研究の主題であり、特徴である基本的理論の詳細な紹介である。変位法で用 いる剛性行列を導くために部材の釣り合い式の誘導(第2章)から始まり、行列の因数分 解と分解された要素が矩形行列の場合の正方行列化する手法(第3章)が記述される。最 適設計条件による解を求めるために用いられる正方行列の対角要素和の工学的意義とその 応用方法(第4章)が、さらに最適値を得るためにラグランジェの未定係数法の手法(第 5章)が記述される。この編で記述されることは最適設計法の基本となる構造解析手法と 数理計画手法が中心であり、本論文の特徴となる3つの主眼点の理論内容が盛り込まれて いる。 第3編は構造物の主構部材体積(重量)を一定とする拘束条件下における骨組構造物の最適断面を求める設計法の提案であり、第2編の理論を適用して3種類の最適化条件によ
る手法を提案紹介する。
最適化条件の1例日は構造物の振動問題として固有周期自乗和を最小化することとする。 これは近似的に1次固有周期を最小とする断面設計法(第2章)である。 2例日は静的応 力度問題としていろいろな荷重によって部材に生じる応力度の自乗和を最小化することで ある。この応力度自乗和を最小化することにより構造部材に平均化された応力度が生じる ような断面設計法(第3章)を記述する。これは応力度が大きく変わることなく構造物を 通して平均化出来ることに着目している。3例目は座屈問題を取り上げ、座屈荷重の逆数
和を最小化することとする。これにより座屈耐荷力を最大とする断面設計法(第4章)杏 記述する。これらの設計法の関連は論じないが結果の相違を設計例で記述して、最適条件 の違いによる設計結果から設計法の安当性を論じる(第5章) 。 本研究の理論の応用例として、第4編は固有値逆数和の応用例が記述される。実際の設計で使われる有効座屈長の算出に適用される弾性固有値解析による1次固有値に代わって 逆数和が応用された結果を比較評価する。座屈問題では低次固有値の特性に着目して1次
固有値による有効座屈長とすべての座屈を考慮した座屈逆数和によるものとが実際の構造
物で比較される。 第5厨では第3蔚で記述した最適設計法の拡張応用例を記述する。応力度自乗和最小化 設計法の応用として斜張橋やニールセン橋の最適なケーブル付加張力の導入値の設計手法を提案する。最適な付加張力を総和が与えられて変動が規定した範囲内に収るような荷重
群と考える。付加張力の初期値と最適値との残差を一定とすることが平均や分散が一定と いう統計的扱いに相当した拘束条件となり、統計的な手法が適用可能になる。このことに よりラグランジェ関数による最適極値問題が固有値の特性方程式を生み、特徴ある数学的 な解法を構成する。この応用例として斜張橋の最適ケーブルプレストレスカの設計例とニー ルセン橋のケーブル張力調整管理例を示して、手法の有用性を評価する。 第6編は本研究のまとめとして、設計手法の理論とその応用結果に・ついての考察と今後 の課題を記述する。 参考文献1) Schmit.L.A.:Structural I)esign by Systematic Synthesis,Proc. of the 2nd Conference on Electronic Computation,ASCE,New York,pp. 1051122, 1960.
2)山田善一:最適設計法の概念と今後の問題点、構造物設計法の最近の進歩と問題点、 土木学会関西支部, pp.90-103,1971. 3)大久保禎二:骨組構造物の最適設計、構造物設計法の最近の進歩と問題点、土木学 会関西支部、 pp.105-120, 1971. 4)大久保禎二:トラス構造物の最適設計法に関する研究、土木学会論文報告集、第177 号、 1970. 5)杉本博之:トラス構造物の実用的最適設計に関する研究、土木学会論文報告集、 第208号、 1972. 6)長谷川彰夫、坂下克之、西野文雄:最大荷重設計と最小重量設計の等価性と効率性、 第38回土木学会年次学術講演会概要集、昭和58年9月、 pp.427-428. 7)長井正嗣、赤尾宏、佐野洋一郎、井沢衛: 3径聞達続マルチケーブル斜張橋の基本 形状に関する一考察、土木学会論文報告集、 No.362/I-4、 1985年10月. 8)長井正嗣、赤尾宏、佐野洋一郎、井沢衛: 3径聞達続マルチケーブル斜張橋の部材 断面力算定法の提案、土木学会論文報告集、 No.362/ト4、 1985年10月.
9)山田善一、大宮司尚:斜張橋の最適基準設計に関する研究、土木学会論文報告集、
No.253、昭和51年.10)山田善一、古川浩平、江草拓、井上幸一:斜張橋ケ-ブルの最適プレストレス量決 定に関する研究、土木学会論文報告集No.366/ト4、 1985年4月. ll)丹羽公孝、矢形善秋、上岡直:総合的板取りシステムについて、横河技術技報、 No.4,1984. 12)高久達将、渡辺利夫、吉海達者:橋梁の生産情報に関する自動化システム。日本鋼 管技報、 No.199,1985. 13)坂井藤一、磯江暁、梅田聡他:斜張橋架設精度管理システムの開発、川崎重工技報、 No. 112,pp.65-74, 1992. 1.
14) Tanaka.H,Kamei.M, and Kaneyashi.M: New Cable Tension Adjustment Method for Suspended-Span Bridge, International Conference on Cable-Stayed Bridge,
Bangkok, 1987. 15)古田均、白石成人:ファジィ数理計画法の構造設計への応用に関する基礎的考察、 第38回土木学会年次学術講演会概要集、 Ⅰ-165, 1985. 16)高木録郎、尾関一成、広村修:ニールセン橋のケーブル施工管理、技報たきがみ、 VOL.6、 pp.53-58、 1987.7. 17)高木録郎、尾関一成、武藤英司:ニ-ルセン橋ケーブル張力管理における各種誤差、 技報たきがみ、 VOL.7、 pp.42-47、 1988.ll.
削編基礎理
第1章
基礎理論の概要
数値解析手段と解析方法の発達によって構造物の形状と荷重の状態が確定している系に
対して変形や断面力を算定することば容易になってきている。最適設計法は既知の荷重に
対して変形や作用応力度が拘束条件内に収まるように構造物を設計する手法である。これ は仮定断面に基づいて繰り返し計算を行うことを基本としている。このため、この種の計 算も含めて電子計算機を利用した数値解析は有効に応用されている。 本研究で紹介する最適設計手法はそうした電子計算機での演算処理が中心的な役割を果 たしている。しかし、理論的には狭義の変形法が採用されており、剛性行列を要素行列の 積に分解することに着目している。これは静定構造物の場合には正方行列となるが、不静 定構造物においては矩形行列となるので、仮想行列を想定して正方行列化する手法を工夫 している。この関係より剛性行列の逆行列を要素行列の積として表わしている。さらに、 正方行列の構によって表わすことで最適設計法における目的となる関数をその対角要素和 から導き得ることを示している。また、最適断面を求める数理計画手法はよく知られたラ グランジェの未定係数法が採用され、変分極値問題としている。 本編ではそれら特徴となっている基本的な理論を紹介する。第2章
苦附の釣り合いと剛性行列の因数表示
2.1一般的な部材の釣り合い 本研究の構造解析法は2次元平面骨組構造物を対象にした変形法に基づいている。よく知られた変形法による静的釣り合い条件式を導くとつぎのようになる。
Su-P (2.2.1) ここで u:節点における未知変位量ベクトル P :節点に作用する荷重ベクトル S :部材の剛性行列 である。剛性行列Sは部材の断面特性を表わす部材行列Dと骨組構造の幾何学的結合形状 を表わす行列CAあるいはC8の積として表現されることば周知のことである。 (1) すなわち、 S-CBDCA (2.2.2) となる。しかし、従来の一般的な表現では、行列CAと行列CBは転置行列の関係ではない ことに注意しなくてはならない。 直交座標系を用いて平面構造物の任意部材i j (両端剛結合)を対象として部材の剛性 を行列によって表現するとつぎのようになる。図2.2.1座標系と変位の関係
AMi
QiJ
′ヽQji
南MJ4
Xj
i/rJ・
図2.2.2 部材の材端力と節点力節点i jを結ぶ部材の長さ、断面諸量:Li〕, Aii, 1i〕
材端iからjに向かうベクトルとⅩ軸との方向余弦: 材端iからjに向かうベクトルとy軸との方向余弦: 材端jからiに向かうベクトルとⅩ軸との方向余弦: 材端jからiに向かうベクトルとy軸との方向余弦: スijx-COS βijx-(x〕-Xi)/Li〕 スij,-Sin βi),-(yi-yi)/Li〕 ス〕ix-COS β」ix-(xi-X〕)/Lil Åjiy-Sinβ〕iy-(yi-y〕)/LIづ
と定義する(図2.2.1、 2.2.2参照) 。 部材i jに対して、部材伸びをALIJ,部材回転角RIJ、節点変位をu、 Ⅴ、 ∂と表わす と、
[RAT∴ij
]-Lr_;;≡
8B;;yx
;三:
BBli:xy][vu,,二vu
:]
(2.2.3) という関係がある。両節点i、 jに節点力が作用すると、材端力と対応した変位が生じ、材端iでの材端力をNi)、 Qi〕、 Mi),材端jでの材端力をNJi, Q〕i, M)iとすると、
Nij- N〕i-Li〕 ♂ ♂ 1 Qij=Qji=
Tij(Mij+Mii)=
[11]R
三[S;]・1
2EIlLi〕2JiL
(2.2.4)
;]R
(2.2.6) となる。 (2.2.3)-(2.2.6)式をまとめて行列表示すると材端力はつぎのようになる。 EAi1/Li〕 0 0 0 O 6EIiJ/Lii3 0 0 0 0 6EIi〕/Li)3 0 0 0 0 6EIi〕/Lij3 + -cos8ijx ISin8i)y 02sinβi)y -2cosβi」x -LIJ
-sin βijy COS βi)x
-sin βijy COS βLJX
-cosβjix -Sinβ〕iy 0
2sinβ〕iy -2cosβjix ILi〕
-sinβjiy COSβ〕ix Lii/3
-sinβ〕iy COSβ〕ix 2Li〕/3
2L I.
,,≡
1「≡
作用荷重を節点荷重のみとしているので、上式はつぎのように書き表すことができる。 ただし、材端カベクトルの要素をQi‥ー(Mi〕-M〕i) /L【〕とするのは(2.2.i)式の行列要素 を互いに転置行列CT、 Cで表わすための処置である。従来の理論にしたがって材端カベクトルをMi3、 Mji、 Qiiで表わすと、 S-CBDCA、 CB≠CATとなり不都合である。
+ \ .、 (Mi〕+M〕i)/Li) (Mi〕-MJl) /Ll〕 Nl〕 Qi, (Mi〕lM,i) /Li〕
「EAij/LiJ
0 0 0 12EIi,/Li)3 0 0 0 4EIi」/Li〕 cos βijx Sinβi〕ァ 0-sinβi〕y COSβiix Li)/2
cosβiix SinβJi, 0 -sinβ〕iy COS βJLX LiJ/2
0 0 LiJ・Sign/2 --
[Di」][Ci」,
ニーDijCijuij-Nij ここで、 D;j- C;」- Cj;-L EAi)/Li, 0 0 0 12EIii/Lii3 0 0 0 4EIi,/Lii3 cosβijx Sinβii, 0-sinβi5y COSβi,x Li〕/2
0 0 Li〕・Sign/2
cosβj【x Sinβii, 0
sin βjiy COSβiix Li〕/2
0 0 Li〕・Sign/2 u j V j ∂j」 (2.2.8) . (2.2.9) と表される。 CiJ・、 Cjiは方向余弦の表示がi端側か、 j端側かの違いで区別される。ま
た、 sign/2は剛性行列を3つの積表示する場合、 Ci]、 C」iにより異符号になることを
示し、 sign/2 -sign(i-j)/2 と表わし、 (i<j)では+1を、 (i>j)では--1を意味
する。荷重P,・jの各方向分力AX, AY, AMと節点i, jの変位との関係は
Pi〕-AXi AYi AMi AX〕 △Y〕 AMj
[≡ミ:][Dij][cij,
Cji]
[uuミ]
- C,・jTDijC,・jui (2.2. 10) となるo上式をすべての部材と節点に適用してまとめると構造物全体の剛性行列Sは部材 行列Dと幾何学形状行列Cとの積CTDCの形で表現される(5-8)。 2.2 境界条件(一端ヒンジ、他端剛結の場合) 一端がヒンジの部材に関するC;」とDi」の基礎式はつぎのようになる。 例えば、部材i jのj端がヒンジ、 i端が剛結の場合は前項の釣り合いからMji-0よ りOj-0を消去することになる。したがって、部材行列D;」と骨組構造の幾何学的形状 を表す行列Ci」, C]iはつぎのように表される。 D;)-EAii/Li」 O 0 O 3EIi,/Lii3 0 0 0 3Elii/Li,3
C;j-
Cj;-cos βiix Sinβily
-sinβi〕y COSβijx O 0 cos βjix Sinβ〕i, -sinβji, COSβiix O 0 0 I.. 0 0 0 0 (2.2.ll) 部材端力と変位との関係式、あるいは荷重と変位との関係式は両端剛結合の場合と基本 的には同等であり、構造物全体の剛性行列を表現する形式には変化しない。 2.3 境界条件(両端ヒンジの場合) 両端がヒンジの部材に関するC;jとDh・の基礎式は上述2.2と同様、 Mjl-0よりOj =0 、 Mij-0よりOi-0を消去することになる。したがって、部材行列D;)と骨組構 造の幾何学的形状を表す行列C;」, C」;はつぎのように簡略化される。 D;,I- Ci」- C」i-EAi〕/Liュ 0 冨 3] 3: 0 0 0 0 0 0 cosβijx Sinβiiy 0 0 0 0 cosβ〕ix Sinβii, 0 0 0 0 0 0 0 0 0 0 (2.2. 12)
第3章
要素行列の正法形化と剛性行列の一般化
3.1剛性行列の因数分解 剛性行列Sは S-CTβc (2.3. 1) と表わされることば前述したとおりである。ここでβは対角要素に部材剛性(EA/L, 12EI/ L3・ ・ )の項を持つ対角行列である。静定構造物の場合、 Cは部材の長さと傾きをもっ て形成される正方行列であり幾何学的形状のみに関連する行列である。従来の理論による とS-CBDCA、 CB≠CATという形に展開されているが、行列の特性より対象行列でも 2つの異なる要素に分解されるのである。本研究ではCTβCの展開方法を採用する。こ れより剛性行列の逆行列は容易につぎのように表わされる。 S-1-C 1D-ICT 1 (2.3.2) すなわち、剛性行列Sは部材i jの剛性を表わす小行列D,・jを対角元とする大行列Dと骨組部材i
jの幾何学的な結合状態を表わす小行列Cりを要素とする大行列Cの積として表
現されている。本研究ではこれを因数分解と呼ぶことにする。 3.2 剛性行列の一般化 3つの積に分解された剛性行列について、静定積造物と不静定構造物に分けて説明する。 (1)静定構造物に対する剛性行列 静定構造物の剛性行列Sにおいて、 3つの積の要素行列のうち、 Dは対角要素のみをも つ正方行列であり、部材剛性行列と呼ぶ。 Cは幾何学的形状行列と呼び、同じく正方行列 である。したがって、剛性行列Sの逆行列は行列演算の逆順の法則からつぎのように表わ される。 Sー1- (CTDC)ーl-C lD 1Cト1 (2.3.3) (2)不静定構造物に対する剛性行列 不静定構造物においても剛性行列βは同じように表現されるが、幾何学的形状行列Cは 不静定次数rだけ列数が少ない矩形行列となり、単独の逆行列の演算は不可能となる。行 列Cの正方形行列要素部分をA、残りの行要素部分をBと表わすとつぎのようになる。 S-CTDC =[
ATbT][-9d-p;BO-:
][喜一]
(2.3.4) (3)剛性行列の正方形化 不静定構造物の場合でも要素行列ごとの逆行列が得られるように、剛性行列を拡張する。 幾何学的形状行列Cを小行列に分解し、さらに要素を付加し、正方化して表現する。 sE= CETDCE =[-:-:i;-Z-:]
P61Ti160--L]
[i-i-一芸]
ATDuA+BTDLB ≒ATDuR+BTDLQ
RTD。A+QTDLB ;RTD。R+QTDLQ
Sl≡G
GTiS2 (2.3.5)
ここで小行列Q, Rは幾何学的形状行列Cを正方行列とするための付加行列( Dummy
Clement Matrix)であり、 Du、 DLは要素剛性行列Dを小行列表示したものである。この
ようにして定義される剛性行列SEを本研究では一般化した剛性行列と呼ぶことにする。 この正方行列CEの要素R、 Qがつぎの条件式を満足するならば、剛性行列SEの非対角 小行列は0となって対角小行列要素のみの行列となる。ここでSlは本来のSであり、 S2 はSlより導かれたものであるが逆行列SE+1を得る場合にはSI-lを乱さない独立な仮想 小行列である。 [G] - [ATD。R+ BTDLQ] -0 すなわち、 [R] - [-D。 1AT-1BTDLQ] (2.3.6)
したがって、剛性行列SEは次のように一般化して表わすことができる。 sE=
[solご2
]
(2.3.7) ここでQはr次の正方行列であり任意なものでよいから単位行列Eと仮定することが簡 単である。しかし、 S2を静定基本系の弾性方程式に対応させるためには、 [Q] - [DL 1] (2.3.8) とすることが望ましい。したっがて、 [S2] - [RTD。R+QTDLQ] (2.3.9) と表わされる。 以上の関係から不静定積造物の場合も静定構造物と同様に各々の逆行列を求めることが 一応、可能になり、 FE-SE-i cell --CE11DJICEト1 (2.3.10)]-1
(2.3.ll, Du-1ATJIBTDLDL 1Z-1 DL 1 となる。ここで注意しなくてならないのはCEは部材剛性を表わす対角行列Dに従属することで
ある。 3. 3 不静定構造物に対する幾何学形状行列Cの小行列分解 不静定構造物の幾何学的形状行列Cが不 静定次数r分だけ列数が少ない長方形行列 であることば前項で述べた。実際の解析に おいてCの小行列A, Bの構成方法には留 意が必要である。 Aが正則行列でA-1の演 算が可能でなければならない。この必要性 より、最初に任意に構成された行列Cの行 を交換しつつ上部をn- r-m行の正則行 列Aとなるよう、下部は残るr行の行列B に改める必要がある。この交換作業に合わ せて、部材剛性行列βの対角元も行の変換 に応じて入れ換えられる。 すなわち、つぎのようになる。 DC-[一-7,-u-よ][一三]
(2.3. 12) 小行列分解は不静定構造物より静定基本 系を導き、正方行列A部分は静定基本系部 -静足部材触 (m x 孤 ) -余醐材部分 (r x m ) 図2.3.1行列Cの因数分解分を、 B部分には余剰部材部分を対応させることと同意義である。 (図-2・3・1参照) 3.4剛性行列の因数分解の意義 剛性行列Sを3個の正方行列の積に分解して表現する意義について説明する。 静定構造物では剛性行列は3個の正方行列の積で表わされるので、それぞれの逆行列を 独立に導くことが可能である。これは部材力は部材剛性に関係なく求めることができて、 変位を得るには部材剛性が必要であるという静定構造物の特性に基づくものである。 不静定構造物では部材の結合状況と部材の剛性は静定構造物同様にC、 Dと表現し得る。 しかし、Cの逆行列を単独で求めることが出来ず、材端力は部材の剛性と部材の結合状況 に関連づけて表現されることになる。これは「不静定力を求めるには断面剛性を基にして
仮想仕事計算を行なわなければならない」ことと関連している。無理に幾何学的形状行列
c。を定義するには3.2項に記述したようにR, Qという部材剛性に従属した要素小行列 を定義する必要があるが、この係数は弾性方程式の係数に相当している。しかし、剛性行 列の一般化として行列を分解して表わす手法は、繰り返し計算において毎回構造部材の断 面を仮定し部材力計算の結果で逐次断面を変更して最適断面を設計するような場合には有 効な方法である。なぜなら、行列C。の中でR、 Qの影響は小さいので前段階での剛性Dに よってC。を近似的に仮定し得ること、および材端カベクトルⅣは荷重ベクトルPの最後 の項にr個の0要素を加えることで変形量を経由せず求めることが出来からである。 この拡張された剛性行列を用いると、荷重ベクトルと変位ベクトルとの関係はつぎのよ うに表わされる。[po]-[solsO2]
[uE]
= SE[uo]
(2.3.13) ここで、 (E)-(El,E2, -,Er)Tは仮想要素行列であり、 S2E-0 よりE-0 となり、
拡張部分は 0 である。上式を書きかえると、
u二[uE
]=[solsO2]
[po]
-CE 1D-ICET-1P1
(2.3.14)となる。この式の力学的意味は後述されているので、ここでは割愛する。
構造物全体の材端力と変位との関係は(2.2.8)、 (2.3. 14)式から
NニーDCEu--DCECENID 1CETIIP--CETHIP (2.3.15)
となるが、これは形式的であり, Cを不静定構造物の解析のために拡張された行列CEに
よって置き換えると、次式となる。
NニーDCEu--DCE
(CETDCE)
【1PニーCET 1P (2.3.16)3.5 仮想要素R, Qの力学的意味
行列C。に付加されている仮想要素R、 Qの力学的意味を簡単に説明するために不静定
構造物モデル ① ③ ⑤ 不静定構造物 ① ③ ⑤ 静定基本系 6Ti〕-∑(NiNiLi〕/EAi 6〕。-∑(N【N。Lii/EAi n次不静定構造物の弾性方程式は ∂iiXi+∂iiXi+∂iO-0 上図のトラスは1次不静定構造物 -D7部材を余剰部材・ ・静定基本系のC行列は(7州)行列 β行列は(7Ⅹ7)行列 (2.3.13)式に対応して、上図トラスでは次式となる。 0 =
[s.1sO2][;,]
-[os(16,
7:67,][;7]
C行列
図2.3.2 剛性行列5Eと弾性方程式の融合 VI V2 u2 V4 u4 V5 Ⅹ7 軸方向の伸びと部材両端の節点変位の方向余弦を示している。部材jを仮に切断して、切 断部分に作用反作用力± 1の不静走力を作用させてⅩ〕- 1としたものとする。この場合のCEのj行が意味するその方向余弦は両節点に部材jから及ぼされる節点の仮想荷重成
分と解釈される。 つぎに、 (2.3.6)式におけるRへQ-DLを代入して[R] - [-Du 1AT 1BTDLQ] - [-Du-IAT 1BT] (2.3.17)
と表現する。最初に各余剰部材の切断部分に不静定力± 1の力を加えて部材力をⅩi- 1
とする。この場合に行列BTは両端節点へ作用させたことになる節点力に相当するものを
列要素にまとめた荷重行列であると解釈されよう。したがってBTの各列は不静走力Ⅹ〕-1による節点力となる。一方、 Aは静定基本系の材端力を節点のⅩ、 y方向へ変換す行列
る。また、 AT 1BTの各列は不静定力それぞれをⅩi- 1とする場合の静定基本系の部材 力を意味する。 不静走力Ⅹj-1とした場合の静定基本系の材端力群を[N]と表わすな.らば、 [DuR] - [AT 1BT] - [N]である。トラスではβの対角元はEA〕/L〕であって、部材の剛性 そのものを意味する。 したがって、 [RTDuR] - [N]T[D。] [N]-∑ ( NiNiLii E∧.〕 ) -∂'ii (2.3.18) となることが容易に推察されよう。ただし、この中には余剰部材自身に関する6iiの成分 が除外されているが、その軸力は不静走力±1であるとしているので、 l.., [QTDLQ]-[DL 1] - ∑ ( ) -∂〕i EAii となる。 (2,3.19) 以上の関係から、釣り合い式SEu=PEにおける拡張部分[S2] (u〉 - [P]は (u) - (Ⅹ) (不静走力) [P] - =〕) (外力項∂i。-0) と見なすと、次式に書き換えられる。 [S2] (Ⅹ〉- [RTDuR+QTDLQ] (Ⅹ) - ( ∂'ii+∂ii ) (Ⅹ) -0 (2.3.20)I これは弾性方程式そのものである。すなわち、 r次不静定系では従来の剛性行列Sはr 次だけ縮少された形となるが本研究の一般化された剛性行列(要素行列を正方形化された もの)では少なくなったr次分は弾性方程式で補って元のサイズへ戻した形となっている のである。
第4章
行列の対角和
4.1固有値の逆数和と因数分解CTDCの意義 (1)固有値の逆数和行列Vは重み行列Ⅳをもって直交するものとする。この行列による実対称行列Sの固有
値行列[スi]をつぎのように表現する. VT5V- [スi] 、 VTⅣV-E ここにEは単位行列である。 両辺の逆行列をとると (VTSV) l-V lS-IVト1- [Åi11] , VTWS 1WV- [スitl] (2.4. 1) (2.4.2) となって固有値の逆数が得られる。 行列Bの対角要素biiの和を行列のトレースTrace (B)と呼ぶが、任意の'jf別行列Cに 対してつぎのような関係が成立する。この関係を行列Sの固有値入iに適用すると
∑(スi)-Trace (スi) -Trace (VTSV)
-Trace ( (VT) (SⅣ 1) (ⅣV) )
-Trace (SW-I) (2.4.4)
∑ (1/スi) -Trace (Åi-1)
-Trace (VTⅣS 1ⅣV) -Trace (S lⅣ) -Trace (FⅣ) (2.4.5) となる。上述のことから「行列Sの固有値を個別に求めるには複雑な計算を行わねばなら ないが、固有値の逆数和は逆行列S 1より簡単に得られる。もし、 Sが一般化された剛性 行列であっても拡張部分に対する重み行列Ⅳの要素を0とすれば良い。 」と結論つけられ る。 本研究で取り上げる振動問題や座屈問題では、上述の関係を活用して固有値解析せずに 固有値の逆数和を直接求める設計法に応用する。すなわち、上述の重み行列は振動問題で は質量行列であり、座屈問題では設計荷重による幾何学的剛性行列である。 (2)その他の和 固有倍の逆数は振動問題では固有振動周期の自乗に相当して、座屈問題では座屈荷重の 逆数(あるいは当該座屈モードに限定する場合の危険率の指標)に相当する。したがって、 構造の安全性の解析という観点からは各固有値の逆数に任意の重みを付けて総和する平均 値を制御することが望ましい。 しかし、行列の固有値理論に基づけば特定の重み平均以外
は導き得ない。導き得るものは固有値あるいはその逆数のべき乗和、すなわち∑スKn、
∑ スK n, ( n=1,2,3.. )である。このなかで上述の固有値の逆数和以外に活用することが できる有望なものは、たとえば固有値の逆数を重みとする固有値の逆数の和(逆数の自乗 和)であろう。これは(2.4.5)式,よりr2- ∑1/A i2- Trace(5 1ⅣS 1Ⅳ) (2.4.6)
と直接の固有値計算を行なわずに導かれる。これは高次成分に固有値の逆数という小さい 重みを付けることになるので、このr2を目的関数にすると低次成分を強調する結果を得 る事になる。しかし、これについてはより煩雑な演算を必要とするので、ここでは割愛す る。 (3)因数分解の意義 固有値の逆数和を求めるだけであれば一般に活用されている剛性行列Sをそのまま逆行 列にして(2.4.4)式あるいは(2.4.5)式へ代人すれば良い。しかし最適断面問題では断面積 AJあるいは断面2次モーメントI Jが未知量であるからS 1が断面剛性を因数として陽の 形で含むことが望ましい。すなわち、 S 1-CE-1D 1CET 1と因数分解されているなら ばβ 1は未知剛性の逆数を対角元にした対角行列である。 CEは一応確定値を要素とする 正方行列であるから、 CE-1より得られる係数ak、 βkを基にして Trace(S 1) = ∑(αk/Ak+βk/Ik) (2.4.7)
と表現されることになる。静定構造物であればCE-Cであって断面剛性に独立であるか ら係数αk、 βkは確定値であって最適化は速やかに完了する。しかし不静定構造物では前 述のようにCEは剛性Dに従属して(2.3.5)式、 (2.3.7)式より決定される。このため、 αk、 βkは独立ではないが、収束計算の前段の断面をもってCEを毎回計算して確定値として扱
うのである。本研究のような行列対角和を求めることを対象とする場合には、この表現法
は非常に効果的であり、最適断面への収束が速いことが計算例で実証されている。第5章
ラグランジェの未定イ撤去
5.1ラグランジェの未定係数法による極値問題 構造物の機能性に関するひとつの目的のために、最適な部材断面を求めようとするのが最適設計法である。目的関数f(Ⅹj)、およびいくつかの拘束条件gj(Ⅹj)が設計変数(未知
量) Ⅹj- (Ⅹ1,Ⅹ2,Ⅹ3,・ ・ )の関数として表わされるとすれば、最適化問題はつぎのよう に表示される。 目的関数 Il-f(xj) - mln 拘束条件 gj(xj) ≦ 0 (j-1,2, ・ ・,m) (2.5.1) 最適設計問題では最適値を得る方法の一つとしてラグランジェ関数Jがつぎのように定義 されて、極値問題となる。ここで、 Eはラグランジェ乗数ベクトルあるいは未定係数パラ メータと呼ばれる。 J (xj, E) -f(xj)-E∑ gj(xj) (2.5.2) 最適極値xj とパラメータEを求めるには、つぎのような偏微分を行なって0とすれば よい。」⊥=o
→些)_E∑gjij)=o
axj 3xi 3xi
-㌘'-'-o
-gj(xj)-0 (2.5.3) 上式は数学的には変数とそれを構成する関数が閉集合を構成するならば最適点が必ず存 在し、独立な変数の値が求まることを意味している。拘束条件式が等号であり目的関数、 拘束条件式が微分可能であるならば、最適値を求める問題は上述のようにラグランジェの 未定係数法を用いて変分間題として数学的に解くことができる。多くの最適問題では拘束 条件式が不等号で表わさられるので汎用的な解法がなく、いくつかの数学的解法が論議さ れている。しかし、ここでは言及しない。本研究では等号拘束条件式を主としており、目 的関数ともに線形関係で表わさられるものとして(2.5.3)式を応用する。骨組構造物を対象として最適値を求めるためには変形法の剛性行列が用いられる。本研
究では拘束条件下で構造物の最適断面を決定するので各部材の断面寸法を表わす量を設計 変数とする。この設計変数を含む断面特性を対角要素に含む行列のTraceが最適条件の ための目的関数となる。一般の構造解析では剛性行列を導く場合は支点では変形が生じないので未知変位量を設定しない。このため、力の釣り合い式も抹殺するが、最適値問題で はモーメント反力のある固定端でも断面寸法を表わす変数を設定しなくてはならないo し たがって、変形法での未知変数と最適値問題の変数との数は一致しない。また、各部材や 各支点における断面積あるいは断面二次モーメントは変数の関数である。剛性に無関係な 付加重量(二次部材や床組部材)は変数では表現されない。 このようにして設計変数は拘束条件で制御されつつ、効果的に最適条件を満足させるも のとして求められる。 参考文献 1)例えば、臥C.マーチン著/吉識雅夫監訳:マトリックス法による構造力学の解法 倍風館、 1967.
2)中川建治:はりの固有値の逆数和に関する二三の考察
土木学会論文集、 NO. 150, pp. 1-8, 1968. 3)中川建治:塔状構造物の固有周期の自乗和を最小ならしめる断面変化に関する二三 の考察,土木学会論文報告集、 NO. 169-3. pp. 15-20, 1969.4) S.Panayiotou and K.Nakagawa: A Method of Minimaization of Square Sum of the
Natural Periods of Vibration of a Frame , Computers & Structures.Vol.32,
No. 6,pp. 1331-1337, 1989.
5) K.Nakagawa, K.Andoh and S. I)uan: A I)esign Method of Structures to Minimize
the Square Sum of Natural Periods of Vibration,Computers and Structures,
Vol. 45, No. 3,pp. 587-591, 1992. 6)高木録郎、清水保孝、安藤浩吉:動的あるいは静的に有効なアーチ橋とトラス橋の設 計法に関する研究、技報たきがみ、 γol.10、 pp. 6ト67、1992. 4. 7)高木録郎、前田昌克、中川建治:骨組構造物の最適設計法に対する設計手法の-提案, 構造工学における数値解析シンポジウム論文集第17巻、 pp. 445-460, 1993, 7. 8)高木録郎、前田昌克、中川建治:ラグランジェの未定係数法による最適設計の一手法 第43回応用力学連合講演会講演予稿集、 pp. 54ト544,平成5年12月.
9)福本口秀士:新体系土木工学
9構造物の座屈、安定解析、 (社)土木学会、技報堂出 版、 1982.9. 10)星谷勝、高岡宣善、尾坂芳夫共著:新体系土木工学12土木構造設計法、 (杜)土木 学会編、技報堂出版、 1981.6. ll)構造工学シリーズ1:構造システムの最適化一理論と応用-, (杜)土木学会、昭和63 年9月.第3編骨組構造物の最適設計への応用
第1章
骨組構造物の最適設計法の提案
与えられた外荷重に対して変形や作用応力度が拘束条件内に収まるような骨組構造物の 最適設計手法には多くの研究がある。与えられた荷重に耐え得る最適な構造物を設計する という思想は安全性と経済性という相反する要求にいかなる比率で応えるるかという難問 を含んでいる。しかし、経済性に言及せず、最適設計というものを力学的設計理念に着目 して整理すれば、おおよそつぎのようになろう。 最適化されたと判定する目的関数を類別すれば、 1)部材の応力度の最大値(座屈耐荷力)に着目するもの 2)地震動との共振を避けるために固有周期を変化させるもの 3)極限設計での部材の安全率を均等化させるもの 4)変位の最大値を抑制するもの 等がある。一方、目的関数に応える設計変数や手段には a)構造物全体の力の配分を可能な限り効率的にするために節点の座標を変化させるもの b)部材力の大きさと部材の重要性を配慮して部材ごとに使用材質を適宜変化させるもの c)材質は一定として部材断面を変化させるもの 等が挙げられる。実用的な設計法としてはそれぞれ単一でなく、いくつかを組み合わせた ものであることが一般的であろう。計算手段に電子計算機が登場して以来、多くの最適設 計法が報告されているが、本研究ではいままでの研究とは趣の異なる設計法を提案する。 すなわち、対象は平面骨組構造物であり、 「構造物の主構造部材重量を一定に保つ」とい う拘束条件の下で、 「目的とする条件(例えば、上述1)- 3))に対する最適断面を設計 する方法」である。設計変数は部材断面であり、上述c)の設計法に関するものである。 「一定の主構造重量の下でいろいろな条件に抵抗できるような最適断面設計手法」である から最大荷重設計として経済性を配慮しているとも言えよう。第2章
固有周期自乗和を最小とする最適設計法
2.1 固有周期自乗和最小の意義 本章で紹介する設計法は一定拘束条件のもとで平面骨組構造物の固有周期Ti ( i - 1, 2,-・)の自乗和Il-∑ Ti2を最小にするような最適断面を設計するものである。一般の 構造物では固有周期自乗和rの中に基本周期 Tlの占める比率が大き・い。このため、 rを 小さくすることば、近似的に Tlを小さくすることになる。したがって、本設計法は地盤 卓越周期より小さい基本周期 Tlをもつ構造物を対象にする場合に意義がある。何らかの 必要性から基本周期を小さくして剛な構造物断面を設計しようとするときには有効な手法であろう。 構造物を地震動の被害を受けないようにするには、地盤卓越周期と構造物の固有周期が 一致しないようにすればよい。必ずしも、構造物の固有周期の自乗和を最小化すればよい と言うものではない。しかし、基本周期を長くすることば全体を柔軟な構造にすればよい ので、主構の総体積を少なく自重を軽くすれば目的にかなうことになる。一方、総体積を 増加させて、自重を大きくすると固有周期自乗和最小の構造物をさらに剛にすることにな る。すなわち、主棒材料を有効に活用してrを最小化して剛な構造物を設計することと、 材料の総体構を増減して自重の変化により近似的に固有周期 Tlを変化させることとは分 離して検討し得ることである。 本章では固有周期自乗和最小における理論を紹介し、既に施工されたいくつかの骨組構 造物に対して応用して設計法の安当性を検討する。 2.2 固有周期自乗和 (1)固有周期
一般の自由振動方程式は円振動数をw、振動モードをuとすると、剛性行列Sと質量行
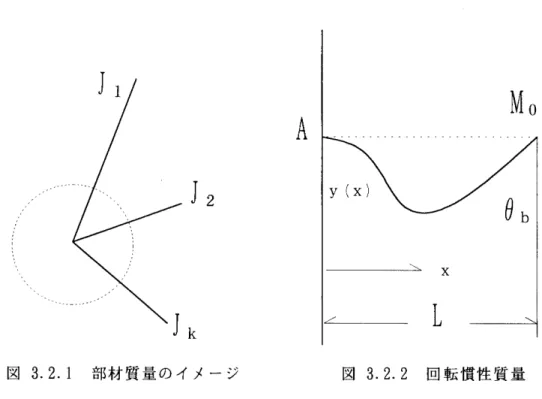
列Ⅳの関係によって Su -u2Wu - 0 (3.2.1) と変換される。本研究の主題の一つである固有値(1i-Wi2)の逆数和r.は、第2編第4 章に述べたように固有値解析を介せずに行列の Trace として、つぎのように求められるo r-∑ (1 /スi) - Trace (S 1W) - Trace (C-ID∼1CTIW) (3.2.2) 固有値の逆数和は固有周期の自乗和に相当するので、 Il -∑(1/1i) - (1/47T2)∑ Ti2 (3.2.3) であり、固有値の逆数和を最小にすることば近似的に 固有周期を最小にすることになる。 (2)質量行列 振動方程式における質量行列について検討をする。 (a)水平・鉛直変位に関与する質量 それぞれの部材質量は点質量(集中質量)として各節点ごとに集中していると仮定し、 各部材の質量は両節点へ半分づつ振り分けられる。任意の節点に集中している全質量はそ の節点に接続しているすべての部材から振り分けられる質量の総和であるから、任意節点 iの水平、垂直の変位に関与する慣性質量はつぎのようになる。wiU-WiV-ち子LijkAijk+
WiO (3・2・4) ここで、右辺の第1項はi点に集まる部材の質量を、第2項は各部材の断面積が変化して も不変なi点の付加質量を表わす。また、 βは単位体積質量である。図 3.2.1 部材質量のイメージ 図 3.2.2 回転慣性質量 (b) 回転変位に関与する質量 (3.2.4)式だけでは回転変位に関与する質量、すなわち回転慣性モーメントを考慮して いない。そこで図 3.2.1のような片側のみに回転変位が生じる系をモデル(a端:固定支 点)にして回転慣性 2次モーメントを導く。 これは材端の回転角のみを与えた場合の梁の静的たわみ曲線を活用することに相当し、 節点の回転振動エネルギーに置換えることを意味している。まず、 b端に回転変位 Obを 生じたときのたわみ曲線を求める。 この場合、 b端に生じる曲げモーメントをM。とすると、曲げモーンメト分布は、
・(x)ニー1Mo+iMo‡
2 2 d2y M (X) M. dx2 EI 2LEI (L-3Ⅹ) (3.2.5) (3.2.6) となる。ここでEIは曲げ剛性、 Lは部材長である。したがって、たわみ曲線はつぎの ように求められる。 βb (L x2-Ⅹ3) eipt (3.2.7) つぎに、 J。を回転慣性モ-メント、 Aを部材断面積とする。連動エネルギーの釣り合いよ り、 1すJoO2=
ニ†:pA妄2dx
(3.2.8)が成り立つ。ここで、 β - βbelpt y(x・t,
-%(Lx2-x3,eipt
1
の関係式を用いて、 (3.2.8)式を書き換えるとつぎのようになる。 1 -J。βb2 (i p eipt) 2 2三†pA二
(3.2.9) (Lx2-Ⅹ3) 2dxβ。2 (i p eipt) 2 (3.2.10) したがって、回転慣性モーメントはつぎのように定義されることになる。Jo-J。:A÷
β A L3 105 (Lx2- Ⅹ3) 2dx (3.2.ll) 最終的には節点iの回転変位に関与する回転慣性質量はつぎのように表わされる。 Wi8-A
p A上iK LijK3 105 (3.2.12)(c)質量行列
節点iの慣性質量行列として、 WiU /g, WiV/g, Wi8/gを対角要素とするつぎのよ
うな小行列ができる。 (3.2.13)
この各節点毎の小行列を集約すると大行列すなわち質量行列Ⅳが構成される。ただし支
点により拘束されている変位は0となるので、その変位に関与する行と列を削除すること になる。 2.3 ラグランジェの未定係数法による最適解 本研究の「構造物の主構部材の総重量を一定に保つ」という構造物の重量に関する拘束条件のもとに構造物の固有値逆数和(固有周期自乗和) ∑(1/Åk)を最小とする最適断 面を決定することを目的関数とする。設計変数は各部材の断面寸法を表わすもの(例えば、 断面積、断面二次モーメント)をh〕とする。したがって、本章の目的は変分間題の極値 解を解くことに帰着する。 単一部材ごとの重量をqj(hi)と表わすと主構造部材重量の総和は W。=:qi(hi) となる。拘束条件(Wo一淀)のもとに目的関数である固有値逆数和 Il -∑ (I/スi)
-Trace(Cl11DJICIT
1W)
(3.2.14) を最小化することになる。 rが極値を持つためにはラグランジェの未定係数を E として ラグランジェ関数 J-r+E (∑qi(hi)-W.) (3.2.15) がh〕と E に関して極値となるようにすればよい。 極値問題の理論的なアルゴリズムと工学的意義は第2編第5葦に記述されており、本編 では割愛する。この理論を用いることが本研究の特徴の一つである。. ここで、 h〕は部材断面積Åm を選び、 h〕-Am として断面二次モーメントIm は既設 構造部材の実状に基づいて断面積から換算(Im- γAm2)するものとしている。部材長を Lmとして、いろいろな境界条件についての最適解を以下に記述する。 (1) 両端剛結部材の場合 幾何学的形状行列Cと重み行列Ⅳは厳密には設計変数 Am の関数である。しかし、収束 の繰り返し計算では定数とみなして剛性行列Dのみが変数を含むものとしてラグランジェ 関数を用いる。 (3.2.15)式における行列の対角要素和を実際に取って表わすと、∫-∑‡
EAm am2Lm3 am3Lm3 + + +12EIⅢ 4EI皿
i・E
(∑ (AmLm) -W。) (3.2.16) となる。ここで、 αml、 αm2、 am3は行列C, Wの要素から定まる係数である。 解析では断面 2 次モーメントを断面積の関数として近似的に表現して、 Im -γmAm2 (3.2.17) と仮定する。さて、 (3.2.16)式に対して、 ∂J/∂Am - 0 を適用すると断面積Am はつぎ のように与えられる。 Am + (αm2+Sα加S) Lm2 E 6EγmAⅢ 1/2 1J77=G-
(3・2・18) 上式は 皿 番部材の最適断面積であり、骨組を構成する全部材について得られるものを 拘束条件に代入すると、 1 wo- ∑A-L--v{7F
∑ G-L- (3.2.19) となる。 (3.2.18),(3.2.19)式よりパラメータEを決定して 断面積Am はWo Gm Am -∑ GmLm (3.2.20) と決定される。 (3.2.20)式の計算においてはG皿の中にもAⅢが含まれているので右辺の Am には前 段階の値を代入して繰り返し計算することによって最適値を得ることになる。 (2)片側ピン結合部材の場合 片側ピン結合部材の場合でも(3.2.15)式より行列の対角要素和をとって表示すると ∫ -∑ α mlLm am2Lm3 am3Lm3 +-+
EAm 3EIm 3EIm
+E (∑ (AmLm) -W.) (3.2.21) となる。最適断面を決定する解析方法は両端剛結部材と同様なので省略するが、 (3・2・20) 式の GⅢ はつぎのようになる。 2 (am2+am3) Lm2 3EγmAm 1/2 (3.2.22) (3)両端ピン結合の場合 両端ピン結合部材の場合では軸方向しか作用していないので、断面2次モ-メントは
考慮しなくてよい。よって(3.2.15)式より行列の対角要素和をとって表示すると
∫-∑(
αmlLmEAmi・E
(∑ (AmLm) - W.)となる。この場合の GⅢ はつぎのようになる。 Gm -(3.2.23)