Tactile Information Processing by Distributed-Type Tri-axial Force Sensor for Robot Finger
Akihito I
TO*, Nobutaka T
SUJIUCHI**, Takayuki K
OIZUMI***and Hiroko O
SHIMA****(Received July 20, 2007)
To realize advanced manipulation, it is necessary to acquire forces and moments applied to the fingertips of the robot hand.
Moreover, it is vital to evaluate the slip between the contacted object and the sensor. Thus, the force applying to the fingertips of the robot hand needs to be measured as distribution information of forces in three directions. Until now, we have developed a distributed-type tri-axial force sensor with 12 sensor elements that can detect vertical force and shear force. The elements are arranged on a 15 mm u 20 mm area on the same plane. In the present paper, tactile information processing algorithms to measure applied force and moment and to evaluate slip, using this developed sensor, is developed. The experimental results demonstrated the effectiveness of these tactile information processing algorithms.
-G[YQTFU force sensor, tactile information processing, robot finger, strain gauges, distributed-type tactile sensor
ࠠࡢ࠼ജࡦࠨ㧘⸅ⷡᖱႎಣℂ㧘ࡠࡏ࠶࠻ᜰ㧘ᱡࠥࠫ㧘ಽᏓဳ⸅ⷡࡦࠨ
ࡠࡏ࠶࠻ᜰߩߚߩಽᏓဳਃゲജࡦࠨࠍ↪ߚ⸅ⷡᖱႎಣℂ
દ⮮ᓆੱ㧘ㄞౝિᅢ㧘ዊᴰቁਯ㧘ᄢፉሶ
㧚 ߪߓߦ
㧘ࡠࡏ࠶࠻ߦߪ㧘Ꮏᬺߩߺߥࠄߕ㧘㜞ᐲߥ
ᬺࠍⴕ߁⼔ᯏེߥߤߦᵴべߩ႐߇ᐢ߇ࠆߎ ߣ߇ᦼᓙߐࠇߡࠆ1, 2)㧚ߎࠇߦ㧘ࡠࡏ࠶࠻ࡂࡦ
࠼ߢ‛ࠍེ↪ߦᛠᜬߒߚࠅᠲߒߚࠅߔࠆ⎇ⓥߥ ߤ߇ⴕࠊࠇߡ߈ߚ 3)㧚ߒ߆ߒ㧘ੱ߇߃ࠆޟེ↪ߥ ᚻޠߦᲧߴࡠࡏ࠶࠻ࡂࡦ࠼ߩེ↪ߐߪୟ⊛ߦഠࠆ
ߣ⸒ࠊߑࠆࠍᓧߥ㧚ߎࠇߪ㧘ੱ߇߃ࠆޟེ↪ߥ ᚻޠߪఝࠇߚࠕࠢ࠴ࡘࠛ࠲ߢࠆߩߣหᤨߦ㧘
ⷡ㧘ജⷡ㧘᷷ⷡ㧘಄ⷡ㧘∩ⷡ㧘ᒢᕈ․ᕈ⼂㧘㕙 ᒻ⁁⼂ߥߤࠍ㜞ᗵᐲߢࡦࠪࡦࠣߔࠆߎߣ߇ߢ߈ ࠆఝࠇߚ⸅ⷡࡦࠪࡦࠣ⢻ജࠍᜬߞߡࠆߩߦኻߒ㧘 ࡠࡏ࠶࠻ࡂࡦ࠼ߦタߒߡࠆ⸅ⷡࡦࠨߩࡦࠪ
ࡦࠣ⢻ജ߇චಽߢߥߚߢࠆ4, 5)㧚ᣢሽߩ⸅ⷡ
* Department of Mechanical Engineering, Doshisha University, Kyoto, JSPS Research Fellow Telephone: +81-774-65-6974, Fax: +81-774-65-6488, E-mail: [email protected]
** Department of Mechanical Engineering, Doshisha University, Kyoto Telephone/Fax: +81-774-65-6493, E-mail: ntsujiuc @mail.doshisha.ac.jp
*** Department of Mechanical Engineering, Doshisha University, Kyoto Telephone/Fax: +81-774-65-6492, E-mail: tkoizumi @mail.doshisha.ac.jp
**** Department of Mechanical Engineering, Doshisha University, Kyoto Telephone/Fax: +81-774-65-6488, E-mail: kt070033 @mail.doshisha.ac.jp
ࡦࠨߪ㧘㕒㔚ኈ㊂ဳ㧘ࡇࠛ࠱ᛶ᛫ဳ㧘శቇဳ㧘ᱡࠥ
ࠫဳߥߤ⒳ޘߩᣇᴺ 6-10)߇ࠆ߇㧘ߕࠇ߽ജ ߩߺࠍᬌߔࠆනᯏ⢻ߢࠆ႐ว߇ᄙ5)㧚߹ߚ㧘
3
ゲ߽ߒߊߪ6
ゲജࡦࠨߢࠆ႐วߢ߽㧘ዊဳൻ߇࿑ࠄࠇߡ߅ࠄߕ㧘ࡠࡏ࠶࠻ࡂࡦ࠼ߩᜰవߦⶄᢙ
タߔࠆߎߣߪߢ߈ߥ㧚ᓥߞߡ㧘ജⷡߦߩߺᵈ⋡ߒ ߡ߽ജߩ↪ὐࠍᱜ⏕ߦ⸘᷹ߔࠆߎߣ߇ߢ߈ߥ㧚 ߎࠇߦࠃࠅࡠࡏ࠶࠻ࡂࡦ࠼ߦࠃࠆᠲࠅߥߤߪ⺋Ꮕߦ ᒙ߽ߩߦߥߞߡߒ߹㧘⚂᧦ઙ߇ᄙᢙ⊒↢ߒߡ ߒ߹߁㧚ߘߎߢ㧘ᚒޘߪ㧘ޟེ↪ߥᚻޠߩታߦ․ߦ
㊀ⷐߢࠆធ⸅ജ㧘ធ⸅⟎㧘Ṗࠅ߇ᬌน⢻ߥ⸅
ⷡࡦࠨࠍ㐿⊒ߒߡࠆ㧚ᧄ⸅ⷡࡦࠨߪ㧘ု⋥ജ ߣߖࠎᢿജࠍ⸘᷹ߢ߈ࠆࡦࠨ⚛ሶࠍᄙᢙ㈩ߒߚ ಽᏓဳਃゲജࡦࠨߢࠆ㧚ᧄࡦࠨߪ㧘ਃಽജߩ ಽᏓᖱႎࠍᓧࠆߎߣ߇น⢻ߢࠆߚ㧘ᓥ᧪ߩ⸅ⷡ
ࡦࠨߦᲧߴធ⸅⁁ᘒߦߟߡߩࠃࠅᄙߊߩᖱႎࠍ ᓧࠆߎߣ߇ߢ߈㧘ᓥ᧪ߩ⸅ⷡࡦࠨߢߪ⸘᷹ߢ߈ߥ ߆ߞߚ⸅ⷡᖱႎࠍᓧࠆߎߣࠍน⢻ߦߔࠆߣ੍ᗐߐࠇ ࠆ㧚
ᧄ⎇ⓥߢߪ㧘ޟེ↪ߥᚻޠߩታߦ․ߦ㊀ⷐߥ⸅ⷡ
ᖱႎߢࠆࡦࠨߦ↪ߔࠆജ㧘ࡕࡔࡦ࠻ߩ⸘᷹㧘
߮㧘Ṗࠅߩᬌ߇น⢻ߥ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭
ࡓߩ㐿⊒ࠍ⋡⊛ߣߔࠆ㧚ᧄ⺰ᢥߢߪ㧘㐿⊒ߒߚࡠࡏ
࠶࠻ᜰ↪ಽᏓဳਃゲജࡦࠨߩ
5
ࡕ࠺࡞ࠍ↪ߡ㧘⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߩലᕈߩᬌ⸽ࠍⴕ߁㧚
㧚 ಽᏓဳਃゲജࡦࠨ
ᧄ┨ߢߪ㧘⹜ߒߚಽᏓဳਃゲജࡦࠨߩ᭴ㅧ߅ ࠃ߮ജේℂߦߟߡㅀߴࠆ㧚
ࡦࠨ⚛ሶߩജේℂ
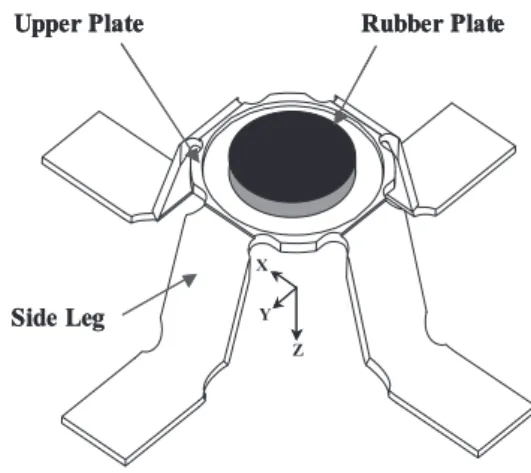
ࡦࠨ⚛ሶߩᒻ⁁ࠍ
Fig. 1
ߦ␜ߔ㧚ࡦࠨ⚛ሶߩ᧚ᢱߪ㤛㌃
(C2108)
ߢࠅ㧘ㇱߩ᧼߇㧠ᧄ⿷ߢᡰ߃ ࠄࠇߚ᭴ㅧߣߥߞߡࠆ㧚ࡦࠨ⚛ሶߩᄢ߈ߐߪ㐳 ߐ25mm
㧘25mm
㧘㜞ߐ10mm
ߢࠆ㧚ࡦࠨ⚛ሶߪ↪ߔࠆജࠍ㕙ߦ⾍ࠄࠇߚᱡࠥࠫߩ㔚᳇ᛶ
᛫ᄌൻߣߒߡᬌߔࠆ㧚㕙᧼ߦߪ
Z
ゲᣇะߦ↪ߔࠆജࠍ⸘᷹ߔࠆߚߩᱡࠥࠫࠍ⾍ࠅ㧘
4
ᧄߩ⿷ߩㇱಽߦߪ
X
㧘Y
ゲᣇะߦ↪ߔࠆജࠍ⸘᷹ߔࠆᱡࠥࠫࠍ⾍ࠆ㧚ߎࠇߦࠃࠅࡦࠨ⚛ሶߪ
3
ಽജࠍ⸘᷹ߔࠆߎߣ߇ߢ߈ࠆ㧚
X
㧘Y
㧘Z
ゲᣇะࠍᬌߔࠆᱡࠥࠫߦߪ㧘ฦゲߏߣߦࡉ࠶ࠫ࿁〝߇⚵߹ࠇ㧘Ꮕ
േ㔚ࠍ⸘᷹ߔࠆߎߣߢ↪ജࠍ⸘᷹ߒߡࠆ㧚㧠 ᧄ⿷ߩਅ᛬ࠅᦛߍㇱߦߪߊ߮ࠇࠍߟߌ㧘
X
ゲᣇะ߽ߒߊߪ
Y
ゲᣇะߦജ߇↪ߒߚᤨߦY
ゲᣇะ߽ߒ ߊߪX
ゲᣇะߩ㧞ᧄߩ⿷ߦ↢ߓࠆᱡࠍዊߐߊߒ㧘⋧ᐓᷤࠍዊߐߊߒߡࠆ㧚߹ߚ㕙ߦߪ㧘ࠧࡓ᧼߇ ធ⌕ߐࠇߡ߅ࠅ㧘
Z
ゲᣇะߩ↪ജ߇㕙᧼ౝߢ╬ಽᏓߦߥࠆࠃ߁ߦߒߡࠆ㧚
ࡦࠨ⚛ሶߦജ߇↪ߒߚᤨ㧘ࡦࠨ⚛ሶߩᄌᒻ ߪᱡࠥࠫࠍ⾍ࠅઃߌߚᚲߩߺߢࠆߎߣ߇ᦸ߹
ߒߊ㧘߹ߚ᭴ㅧ߇ᄢ߈ߊᄌᒻߒߥᔅⷐ߇ࠆߚ㧘
ࡦࠨ⚛ሶߪᕈߩ㜞᧚ᢱߦធ⌕ߒߡࠆ㧚
X
Y Z X
Y Z X
Y Z
Upper Plate Rubber Plate
Side Leg
X
Y Z X
Y Z X
Y Z
Upper Plate Rubber Plate
Side Leg
Upper Plate Rubber Plate
Side Leg
Fig. 1. Shape of sensor element
ಽᏓဳਃゲജࡦࠨߩ᭴ㅧ
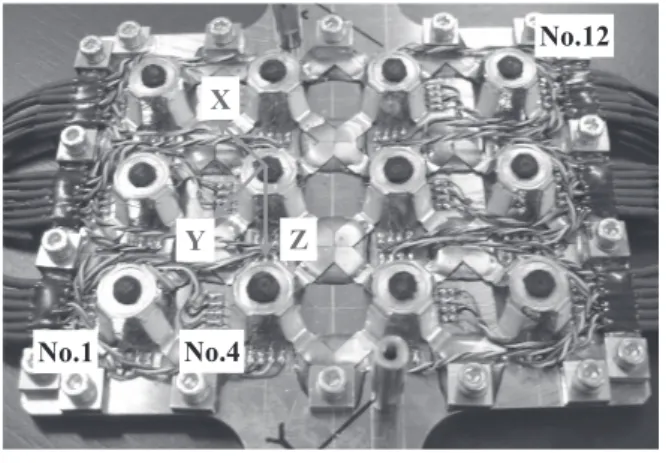
⹜ߒߚࡦࠨࠍ
Fig. 2
ߦ␜ߔ㧚ߎߩಽᏓဳਃゲ ജࡦࠨߪ㧘ࡦࠨ⚛ሶࠍห৻ᐔ㕙75mm
100mm
ߩ㕙Ⓧౝߦ3
4
㈩ߒߚ߽ߩߢࠆ㧚ࡦࠨ⚛ሶ ߩ㈩ߦ㑐ߒߡߪ㧘ฦࡦࠨ⚛ሶߩX
㧘Y
ゲᣇะ߇ ᐔⴕߦߥࠆࠃ߁ߦ㈩⟎ࠍⴕ㧘ࡦࠨߣฦࡦࠨ⚛ሶߩ
X
㧘Y
㧘Z
ゲᣇะࠍ৻⥌ߐߖߡࠆ㧚ฦࡦࠨ⚛ሶߪု⋥ജߣߖࠎᢿജ߇⸘᷹น⢻ߢࠆߩߢ㧘ߎ ߩࡦࠨߪ㧟ಽജߩಽᏓᖱႎࠍ⸘᷹ߔࠆߎߣ߇น⢻
ߦߥࠆ
.
ߎߎߢ㧘ࡦࠨ⚛ሶߩ⇟ภࠍ
Fig. 2
ߩᏀ߆ࠄ1
⋡ߩਅ߆ࠄ
No.1
㧘No.2
㧘No.3
ߣߒ㧘Ꮐ߆ࠄ2
⋡ߩ ਅ߆ࠄNo.4
㧘No.5
㧘No.6
㧘Ꮐ߆ࠄ3
⋡ߩਅ߆ࠄNo.7
㧘No.8
㧘No.9
㧘Ꮐ߆ࠄ4
⋡ߩਅ߆ࠄNo.10
㧘No.11
㧘No.12
ߣߔࠆ㧚߹ߚ㧘ᧄ⎇ⓥߢߪࡦࠨߩᐳᮡ♽ࠍ No.5 ߩ⟎ࠍේὐߣߒ㧘 No.5 ߩ X 㧘 Y 㧘 Z ゲ ᣇะࠍࡦࠨߩᐳᮡ♽ߣห৻ߣߥࠆ᭽ߦ⸳ቯߔࠆ㧚
ᧄࡦࠨߩࡦࠨ⚛ሶߩ᭽ࠍ Table 1 ߦ␜ߔ㧚♖
ᐲߪฦᣇะߩቯᩰജ୯ߦኻߔࠆ⊖ಽ₸㧔 %RO 㧕ߢ
᳞㧘 12 ߩࡦࠨ⚛ሶߩᐔဋ୯㧘ᮡḰᏅ㧔 SD 㧕 ߢ␜ߒߡࠆ㧚
Fig. 2. Overview of sensor
Table 1. Specifications of sensor elements X-, Y-axis Z-axis Rated force [N] 14.7 49.0 Accuracy [%RO]
(SD)
3.79 (0.91)
0.55 (0.54)
㧚 ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓ
ฦࡦࠨ⚛ሶߪု⋥ജ㧘ߖࠎᢿജࠍ᷹ቯߔࠆߎߣ ߇น⢻ߢࠆߩߢ㧘ᧄࡦࠨߪ↪ߔࠆജࠍ 3 ಽജ ߩಽᏓᖱႎߣߒߡ⸘᷹ߢ߈ࠆ㧚ࠃߞߡ㧘ฦࡦࠨ⚛
ሶߩജࠍ߽ߣߦࡦࠨోߦ↪ߔࠆ↪ജ㧘
↪ࡕࡔࡦ࠻㧔ࡦࠨᐔ㕙ߦု⋥ߥゲࠅߩࡕࡔ ࡦ࠻㧕ࠍ᳞㧘Ṗࠅࠍᬌߔࠆ⸅ⷡᖱႎಣℂࠕ࡞ࠧ
࠭ࡓࠍᚑߔࠆ㧚ߎߎߢ㧘ṖࠅߪࡒࠢࡠߥṖࠅߣ ࡑࠢࡠߥṖࠅߦಽߌࠄࠇࠆ㧚ࡒࠢࡠߥṖࠅߪṖࠅߩ
ೋᦼ⁁ᘒߢࠇ㧘ࡒࠢࡠߥṖࠅ߇ᄢߒࡑࠢࡠߥṖ ࠅߔߥࠊߜࡦࠨߣធ⸅‛ߩ⋧ኻ⊛ߥṖࠅߣߥࠆ㧚 ࡒࠢࡠߥṖࠅߣࡑࠢࡠߥṖࠅߪㅪ⛯⊛ߦߎࠆ⽎
ߢࠅ㧘ࡒࠢࡠߥṖࠅࠍ⸘᷹ߔࠇ߫ࡑࠢࡠߥṖࠅࠍ
੍᷹ߔࠆߎߣ߇ߢ߈ࠆ㧚㧘ࡒࠢࡠߥṖࠅߩᬌ
ᣇᴺߣߒߡᨵエߥ⚛᧚ߩਛߦࡇࠛ࠱ࡈࠖ࡞ࡓࠍၒ
ㄟߺ㧘ࡇࠛ࠱ࡈࠖ࡞ࡓߢᓧࠄࠇࠆᝄേᖱႎߦࠃࠅࡒ
ࠢࡠߥṖࠅࠍᬌߒߡࠆ
11)㧚ߒ߆ߒ㧘ߎߩᣇᴺߢ ߪṖࠅᣇะࠍᬌߔࠆߎߣ߇ߢ߈ߥ㧚ߘߎߢᧄ⎇
ⓥߢߪฦࡦࠨ⚛ሶߦ⾍ࠄࠇߚᱡࠥࠫߩജ୯ߩ ᝄേᖱႎ߆ࠄࡒࠢࡠߥṖࠅࠍᬌߒ㧘Ṗࠅᣇะߪ
ࡦࠨ⚛ሶߩߖࠎᢿജᣇะߩജ୯ࠃࠅᬌߔࠆߎߣ ࠍ⹜ߺࠆ㧚
ᓥߞߡ㧘⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߪធ⸅‛߆ ࠄฃߌࠆജ㧘ࡕࡔࡦ࠻㧘ࡒࠢࡠߥṖࠅߣࡑࠢࡠߥ Ṗࠅߦᵈ⋡ߔࠆߣએਅߩ႐วಽߌ߇ᔅⷐߢࠆ㧚 Case (1) 3 ಽജ߇↪ߔࠆ႐ว
Case (2) ࡕࡔࡦ࠻߇↪ߔࠆ႐ว
Case (3) Case (1) ߦട߃ਗㅴṖࠅ↢ߓࠆ႐ว Case (4) Case (2) ߦട߃࿁ォṖࠅ↢ߓࠆ႐ว
Case (5) ࡑࠢࡠߥṖࠅ㧔ਗㅴṖࠅ㧘࿁ォṖࠅ㧕߇↢
ߓࠆ⋥೨ߦࡒࠢࡠߥṖࠅ߇↢ߓࠆ႐ว ߎߩ 5 ߟ႐วߦ߅ߡ㧘ߘࠇߙࠇ⸅ⷡᖱႎಣℂࠕ࡞
ࠧ࠭ࡓࠍᚑߔࠆ㧚
%CUGߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓ
Case (1) ߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߢߪ㧘ࡦࠨ
ߦ↪ߔࠆ↪ജࠍ Z ゲᣇะߩ↪ജߩജਛᔃὐ ߦ↪ߒߡࠆ߽ߩߣߒߡ᳞ࠆ
12)㧚
ജਛᔃὐࠍ᳞ࠆࠕ࡞ࠧ࠭ࡓࠍ␜ߔ㧚߹ߕ㧘 12 ߩࡦࠨ⚛ሶߩജࠍᑼ (3-1) ߦ␜ߔ㧚
xi yi zit
i f f f
f
i 112 (3-1)
ࠃߞߡ㧘ࡦࠨߦߊ↪ജߪᑼ
(3-2)ߣߥࠆ㧚
¦
¦
¦
121 12
1 12
1 , ,
i zi
i yi z i xi y
x f F f F f
F (3-2)
ߎߎߢ㧘ේὐࠅߩജߩࡕࡔࡦ࠻ࠍ⠨߃ࠆ㧚ේὐ ߆ࠄฦࡦࠨ⚛ሶ߹ߢߩࡌࠢ࠻࡞ࠍ
riߣߔࠆߣ㧘
r f i j kM x y z
i iu i M M M
¦
121 (3-3)
ߣߥࠆ㧚ᰴߦജਛᔃὐ
Gߩᐳᮡࠍ㧘
x, y, z XG,YG,0 (3-4)ߣߒߡ㧘ജਛᔃὐࠅߩജߩࡕࡔࡦ࠻ࠍ᳞ࠆ㧚
ജਛᔃὐ
G߆ࠄߩฦࠛࡔࡦ࠻߹ߢߩࡌࠢ࠻࡞
ࠍ
rcߣߒ㧘ේὐ߆ࠄജਛᔃὐ
G߹ߢߩࡌࠢ࠻࡞ࠍ
Rߣߔࠆߣ㧘ജਛᔃὐࠅߩജߩࡕࡔࡦ࠻
MGߪᑼ
(3-5)ߣߥࠆ㧚
No.1
No.12
No.4
Y Z
X
^
i j k`
k j i
f R f
r f
r M
x G y G z G z G
z y x
i i
i i i
i i i
G
F Y F X F X F Y
M M M
u u
cu
¦ ¦
¦
121 12
1 12
1
(3-5)
MG
ߩ
X㧘
Yゲᣇะᚑಽߪࡠߣߥࠆߎߣࠃࠅ㧘
ജਛᔃὐ
Gߩ⟎ߪ㧘
¸¸
¹
·
¨¨©
§ , ,0 ,
,
z x z
y
F M F z M y
x (3-6)
ߣߥࠆ㧚
ࠃߞߡ㧘
Case (1)ߪജਛᔃὐߦ↪ߔࠆജߣߒߡ
᳞ࠄࠇࠆ㧚
%CUGߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓ
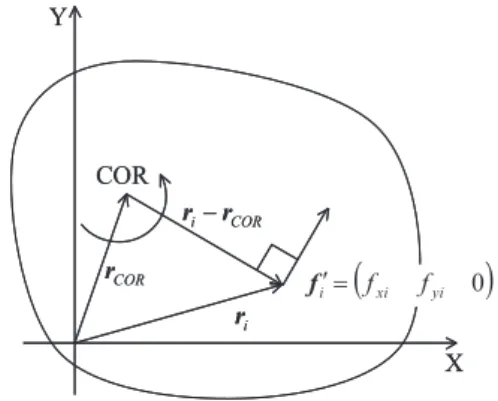
ฦࡦࠨ⚛ሶߩജ୯ࠃࠅ࿁ォਛᔃ
(COR)ࠍ᳞㧘 ߘߩ࿁ォਛᔃߦࡕࡔࡦ࠻߇↪ߒߡࠆߣߔࠆ㧚 ฦࡦࠨ⚛ሶߩജ୯ߣ࿁ォਛᔃߩ㑐ଥࠍ
Fig. 3ߦ
␜ߔ㧚
Fig. 3ߩ㑐ଥࠃࠅᑼ
(3-7)߇ᓧࠄࠇࠆ㧚
fxi fyi0
rirCOR0 (3-7)
ᑼ (3-7) ߩ㑐ଥ߇ฦࡦࠨ⚛ሶߦኻߒߡᚑࠅ┙ߟߎߣ
ࠃࠅ㧘࿁ォਛᔃࠍ᳞ࠆߎߣ߇น⢻ߣߥࠆ㧚ᓥߞߡ㧘 ߎߩ࿁ォਛᔃߦ↪ߒߡࠆࡕࡔࡦ࠻ߪ㧘ᑼ (3-8) ߦࠃࠅ᳞߹ࠆ㧚
¦
12 u1
0
i xi yi i COR
t
COR f f r r
M
(3-8)
એࠃࠅ㧘 Case (2) ߪ࿁ォਛᔃߦ↪ߔࠆࡕࡔࡦ࠻
ߣߒߡ᳞ࠄࠇࠆ㧚 Case (1) ߣ Case (2) ߩ⼂ߪ㧘ฦ
ࡦࠨ⚛ሶߦ↪ߔࠆ X 㧘 Y ゲᣇะߩജߩะ߈ߦࠃ ࠅⴕ߁㧚
%CUGߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓ
Case(1) ߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߣห᭽ߦ
ജಽᏓߩਛᔃὐࠍ᳞㧘ߘߩജਛᔃὐߩ⒖േ߆ࠄ㧘 ਗㅴ⒖േ〒㔌㧘Ṗࠅᣇะࠍ᳞ࠆ
13)㧚
ᤨ㑆
tߢߩജਛᔃὐ
Gߩ⟎ࠍᑼ (3-9) ߣߔࠆߣ㧘 ਗㅴṖࠅߩ⒖േ〒㔌
dG tߪᑼ (3-10) 㧘Ṗࠅᣇะ
Dߪ ᑼ (3-11) ߣߥࠆ㧚
xt
,
yt,
ztXG
t
,
YG t, 0 (3-9)
^
X t X t t`
2^
Y t Y t t`
2t
dG G G ' G G '
(3-10)
Fig. 3. Relationship between output values of sensor element and center of rotation
¸ ¸
¸
¹
·
¨ ¨
¨
©
§
¦
¦
12 1 12 1 1
tan
i xi
i yi
f
D f (3-11)
ߎࠇߦࠃࠅ㧘ធ⸅‛ߩਗㅴṖࠅߩ⹏ଔ߇น⢻ߦߥ ࠅ㧘⒖േ〒㔌㧘Ṗࠅᣇะࠍ᳞ࠆߎߣ߇ߢ߈ࠆ㧚
%CUGߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓ
࿁ォṖࠅࠍធ⸅ࡄ࠲ࡦߩᘠᕈਥゲᣇะߩᄌൻߦ ࠃࠅᬌ⍮ߔࠆ㧚߹ߕ㧘ធ⸅ࡄ࠲ࡦߩജਛᔃὐߦ 㑐ߔࠆᘠᕈ࠹ࡦ࠰࡞ߪᑼ (3-12) ߣߥࠆ㧚
¸¸
¸
¹
·
¨¨
¨
©
§
Ozz Oyy Oyx
Oxy Oxx O
I I I
I I
0 0
0 0
I (3-12)
ᘠᕈਥゲ
Ixc㧘
Iyc㧘
Izc㧘ߣᘠᕈਥゲᣇะT ࠍ↪ߡ ᑼ
(3-12)ࠍ␜ߔߣ㧘ᑼ
(3-13)ߣߥࠆ㧚
T
T R
R
I t
z y x O
I I I
¸¸
¸
¹
·
¨¨
¨
©
§
c c c
0 0
0 0
0 0
(3-13)
ߚߛߒ㧘
RTߪ
Zゲࠅߩࠝࠗⷺߩ࿁ォⴕߢ
ࠆߩߢ㧘ᑼ
(3-14)ߣߥࠆ㧚
¸¸
¸
¹
·
¨¨
¨
©
§
1 0 0
0 cos sin
0 sin cos
T T
T T
RT (3-14)
ߎߎߢ㧘ᑼ
(3-13)㧘
(3-14)ࠃࠅᘠᕈਥゲᣇะT ߪએਅ ߩࠃ߁ߦߥࠆ㧚
¸¸
¹
·
¨¨
©
§
xx yy
xy
I I
2I 2tan
1 1
T (3-15)
COR
ri
rCOR
COR
i r
r
xi yi 0ic f f
f
X Y
COR
ri
rCOR
COR
i r
r
xi yi 0ic f f
f
X Y
ᑼ
(3-15)ࠃࠅ㧘ᤨ㑆
tߢߩធ⸅ࡄ࠲ࡦߩ࿁ォⷺᐲߪ એਅߩࠃ߁ߦߥࠆ㧚
t t t t
dT T T ' (3-16)
ߎࠇߦࠃࠅ㧘࿁ォṖࠅ߇↢ߓߚ႐วߩ࿁ォㆇേߩ⹏
ଔ߇น⢻ߣߥࠆ㧚
%CUGߩ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓ
ࡒࠢࡠߥṖࠅߪ
Fig. 4ߦ␜ߔࡈࠖ࠼ࡈࠜࡢ࠼
ဳ࠾ࡘ࡞ࡀ࠶࠻ࡢࠢࠍ↪ߒߡᬌࠍⴕ߁㧚 ߎߎߢឭ᩺ߔࠆ࠾ࡘ࡞ࡀ࠶࠻ࡢࠢߪࡒࠢࡠߥ Ṗ ࠅ ߇ ↢ ߓ ߡ ࠆ ߆ ߤ ߁ ߆ ߩ ߺ ࠍ ᬌ ߔ ࠆ 㧚
k
yi
i 1,2,,nࠍ╙
kጀ߆ࠄߩജ㧘 Z
ijk1,kߪ⚿ว⩄
㊀㧘
Tjࠍ㑣୯ߣߔࠆߣ㧘࠾ࡘ࡞ࡀ࠶࠻ࡢࠢߩ ฦጀߦ߅ߌࠆജ㑐ଥߪ㧘ᑼ
(3-17㧕㧘
(3-18)ߣߥࠆ㧚
ജ㧦
n iki k k ij k
i y
x
¦
Z 1, (3-17)ജ㧦
yik f xik (3-18)ߎߎߢ㧘
f xߪવ㆐㑐ᢙߣ߫ࠇ㧘৻⥸ߦන⺞Ⴧട 㑐ᢙߢࠆ㧚ᧄ⎇ⓥߢߪਛ㑆ጀߩવ㆐㑐ᢙߣߒߡᑼ
(3-19)ࠍ↪ߚ㧚
erx
x
f
1
1
(3-19)ߚߛߒ㧘
rߪᱜߩછᗧଥᢙߢࠆ㧚߹ߚജጀߩવ
㆐㑐ᢙߣߒߡߪ✢ᒻ㑐ᢙࠍ↪ߚ㧚
ߎߩ࠾ࡘ࡞ࡀ࠶࠻ࡢࠢߩജߦߪ㧘ᑼ
(3-20)ߦ␜ߔฦࡦࠨ⚛ሶߩ
Zᣇะߩജ୯ߩ
FFTᚑಽࠍ
↪ࠆ㧚
Nkl N j
l zil
i k 1f e 2 /
0
¦
SR k ,12,,N (3-20)
ߎߩ
Ri kߪฦࡦࠨ⚛ሶߩ
Zᣇะߩജ୯
fziߩᤨ
㑆
t255't߆ࠄᤨ㑆
t߹ߢߩ
N 256ߩ୯ࠍ↪
ߡ⸘▚ߐࠇࠆ㧚ߎߩ
Ri kߩૐᵄᢙၞߩ
40ߩᚑ ಽࠍജߣߒߡ↪ࠆ㧚ߎߩ࠾ࡘ࡞ࡀ࠶࠻ࡢ
ࠢߩജߪ㧘ᑼ
(3-21)ߣቯ⟵ߒߚ㧚
¯®
Slip Micro Noslip Aoutput
1
0
(3-21)߹ߚ㧘ਗㅴṖࠅ߇↢ߓࠆ႐วߩࡒࠢࡠߥṖࠅߢߪ
ᑼ
(3-11)ࠍ↪ߡṖࠅᣇะࠍᬌߔࠆ㧚
x x x x x x
x x x x x x
x x x x x
x Aoutputi1 R
i 2 R
i 3 R
i 40
R xx
x x x x
x x x x x x
x x x x x
x Aoutputi1 R
i 2 R
i 3 R
i 40 R
Fig. 4. Model of the proposed feed-forward neural network
㧚 ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߩᬌ⸽
⹜ߒߚಽᏓဳ⸅ⷡࡦࠨ߇㧘ࡦࠨߦ↪ߔࠆ ജ㧘ࡕࡔࡦ࠻ࠍ⸘᷹ߢ߈㧘ធ⸅‛ߣࡦࠨߣߩ
⋧ኻㆇേࠍ⹏ଔߔࠆߎߣ߇ߢ߈ࠆߎߣࠍታ㛎ߦࠃࠅ ᬌ⸽ߔࠆ㧚ࡦࠨ⚛ሶߪ
3ಽജ߇᷹ቯน⢻ߢࠆߩ ߢฦࡦࠨ⚛ሶߩ✚ߢࠆࡦࠨߦ↪ߔࠆജߪ
⸘᷹น⢻ߥߎߣߪࠄ߆ߢࠆ㧚ᓥߞߡ㧘ᧄ┨ߢߪ㧘
Case(2)-(5)
ߦᵈ⋡ߒታ㛎⚿ᨐࠍᬌ⸽ߔࠆ㧚
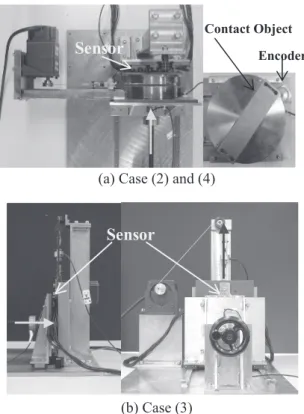
ታ㛎ᣇᴺ
Fig. 5
ߦ␜ߔⵝ⟎ࠍ↪ߡታ㛎ࠍⴕ߁㧚
Case (2)ߦ
߅ߡߪ
Fig. 5(a)ߦ␜ߔ᭽ߦࡦࠨߦု⋥ജࠍ↪
ߐߖ㧘ߘߩᓟࡦࠨߦធ⸅ߒߡࠆㇱಽࠍ࿁ォߐߖ ࠃ߁ߣߔࠆߎߣߢࡦࠨߦࡕࡔࡦ࠻ࠍ↪ߐߖࠆ㧚
Case (3)
ߦ߅ߡߪ
Fig.5 (b)ߦ␜ߔ᭽ߦࡦࠨߦု⋥
ജࠍ↪ߐߖ㧘ߘߩᓟࡕ࠲ࠍ↪ߡࡦࠨࠍᒁ ߈ߍࠆߎߣߦࠃࠅࡦࠨߦਗㅴṖࠅࠍ↢ߓߐߖࠆ㧚
ࡦࠨߩ⒖േ〒㔌ࠍᄌ⸘ߦࠃࠅ᷹ቯߔࠆ㧚
Case (4)ߦ߅ߡߪ
Fig. 5 (a)ߦ␜ߔ᭽ߦࡦࠨߦု⋥ജࠍ
↪ߐߖ㧘ߘߩᓟࡦࠨߦធ⸅ߒߡࠆㇱಽࠍ࿁ォߐ ߖࠆߎߣߢ࿁ォṖࠅࠍ↢ߓߐߖࠆ㧚ធ⸅‛ߩ࿁ォ
ⷺᐲߪ㧘ࠛࡦࠦ࠳ࠍ↪ߡ᷹ቯߔࠆ㧚ฦࡦࠨ
⚛ሶߩജߪ㧘㔚ᬺߩࠝࡦࠗࡦဳࠦࡦ࠺ࠖ
࡚ࠪ࠽
(MCE-24)ࠍേᱡ᷹ቯེߣߒߡ↪ߡ᷹ቯߔ
ࠆ㧚
%CUGߩᬌ⸽
ೋߦ㧘
Case(2)ߩታ㛎⚿ᨐࠍ
Fig. 6ߦ␜ߔ㧚↪
ࡕࡔࡦ࠻߇ዊߐᤨ㧘ฦࡦࠨ⚛ሶߦ↪ߔࠆߖ
(a) Case (2) and (4)
(b) Case (3)
Fig. 5. Experimental equipment
ࠎᢿജᣇะߩജ߇ዊߐߚ᷹ቯ୯ߪ⺋Ꮕߩᓇ㗀ࠍ ᄢ߈ߊฃߌࠆ㧚ߘߩߚ㧘ᑼ(3-7)ߩ㑐ଥ߆ࠄ࿁ォਛ ᔃࠍᱜ⏕ߦ᳞ࠄࠇߥ㧚ࠃߞߡ㧘Fig. 6 ߢߪ⸘᷹
㐿ᆎ߆ࠄ 1.7 ⑽߹ߢߩ⸘᷹୯ࠍࡠߣߒߡࠆ㧚
↪ࡕࡔࡦ࠻߇ᄢ߈ߊߥࠆߦᓥචಽߥ♖ᐲߢ↪
ࡕࡔࡦ࠻ࠍ⸘᷹ߢ߈ߡࠆߣ⸒߃ࠆ㧚એߩ⚿ᨐ ࠃࠅ㧘⹜ߒߚಽᏓဳ⸅ⷡࡦࠨߪ㧘ᚑߒߚ⸅ⷡ
ᖱႎಣℂࠕ࡞ࠧ࠭ࡓߦࠃࠅ↪ജ㧘↪ࡕࡔࡦ
࠻ࠍ⸘᷹ߔࠆߎߣ߇ߢ߈ࠆߎߣ߇␜ߖߚ㧚
ᰴߦ㧘Case(3)ߩታ㛎⚿ᨐࠍ␜ߔ㧚ߎߩታ㛎⚿ᨐߪ㧘
ࡦࠨߩZゲᣇะߦ⚂14Nߩജࠍ↪ߐߖߚ⁁ᘒߢ X ゲᣇะ߆ࠄ 45 ᐲᣇะߦਗㅴṖࠅࠍ↢ߓߐߖߚ⚿
ᨐߢࠆ㧚ജਛᔃὐ(COP)ߩ⒖േࠍFig. 7ߦ␜ߒ㧘
⒖േ〒㔌ࠍFig. 8ߦ␜ߔ㧚ߘߒߡ㧘⒖േᣇะࠍFig. 9
ߦ␜ߔ㧚Fig. 9 ߢߪ㧘ਗㅴṖࠅ߇↢ߓࠆ߹ߢߩ⒖േ
ᣇะߩ୯ߪࡠߣߒߡࠆ㧚ߎߩ⚿ᨐࠃࠅ㧘ജਛ ᔃὐߩ⒖േ㧘⒖േ〒㔌ߣ߽ߦታ㓙ߩജਛᔃὐߩ⒖
േ㧘⒖േ〒㔌ߣߩ⺋Ꮕ߇ᄢ߈ߊߥߞߡࠆ㗔ၞ߇ሽ
ߔࠆ㧚೨┨ߢ␜ߒߚ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߢ ߩࡦࠨ⚛ሶߩ⟎ߪࡦࠨ⚛ሶߦ⾍ࠅઃߌߡࠆ
ㇱߩࠧࡓߩਛᔃ⟎ߢቯ⟵ߒ㧘ߘߩࠧࡓߩਛᔃ
⟎ߦ↪ജ߇↪ߒߡࠆ߽ߩߣߒߡࠆ㧚ߒ߆ߒ㧘 ធ⸅‛ߦធߒߡߥ߆ߞߚࡦࠨ⚛ሶ߇ធ⸅‛
߇ធߒᆎࠆ㓙㧘ࡦࠨ⚛ሶߪ㕙ߩࠧࡓߩ┵߆ࠄ ធ⸅‛ߦធߒᆎ㧘↪ജࠍฃߌᆎࠆ㧚ࠃߞߡ㧘
ࡦࠨ⚛ሶߦ⾍ࠅઃߌߚࠧࡓ᧼ߪ⋥ᓘ 5.0mm ߢ
ࠆߩߢ㧘⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߢቯ⟵ߒߚജߩ
↪ ὐߣ ฦ ࡦ ࠨ⚛ ሶߩ ታ 㓙ߩ ↪ ὐ ߇ᦨ ᄢߢ
2.5mmߕࠇࠆߎߣߦࠃࠅ㧘⺋Ꮕ߇↢ߓߚේ࿃ߣߥࠆ
ߣ⠨߃ࠄࠇࠆ㧚߹ߚ㧘ฦࡦࠨ⚛ሶߩ㜞ߐߦ߫ࠄߟ ߈߇ሽߔࠆߚ㧘㜞ߐߩ㜞ࡦࠨ⚛ሶߩ↪ജ ߇ᄢ߈ߊߥࠅ㧘ૐࡦࠨ⚛ሶߢߪዊߐߊߥߞߚߚ
ታ㓙ߩ୯ߣߩ⺋Ꮕ߇ᄢ߈ߊߥߞߚߣ⠨߃ࠄࠇࠆ㧚 ߒ߆ߒ㧘ฦࡦࠨ⚛ሶߩ㑆ߩᦨ⍴〒㔌߇25.0㨙㨙ߦ
߽߆߆ࠊࠄߕߘࠇએਅߩធ⸅‛ߩਗㅴㆇേࠍᝒ߃ ࠆߎߣ߇ߢ߈ߡࠆߣ⸒߃㧘ਗㅴṖࠅߩᬌ⍮߇น⢻
ߢࠆߎߣࠍ␜ߒߡࠆ
Fig. 6. Measured result of applied moment
Fig. 7. Measured result of COP
-0.5 0 0.5 1 1.5 2 2.5 3
-0.5 0 0.5 1 1.5 2 2.5 3
X [mm]
Y [mm]
Calculated COP Actual COP
-0.5 0 0.5 1 1.5 2 2.5 3
-0.5 0 0.5 1 1.5 2 2.5 3
X [mm]
Y [mm]
Calculated COP Actual COP Calculated COP Actual COP Calculated COP Actual COP
0 1 2 3 4 5 6 7
-5 0 5 10 15 20
Time [s]
Moment [Nmm]
Calculated Moment Applied Moment
0 1 2 3 4 5 6 7
-5 0 5 10 15 20
Time [s]
Moment [Nmm]
Calculated Moment Applied Moment Calculated Moment Applied Moment Calculated Moment Applied Moment
Sensor
Sensor
Contact Object EncoderSensor
Sensor
Fig. 8. Measured result of displacement of COP
Fig. 9. Measured result of slip direction
ᦨᓟߦ㧘Case(4)ߩታ㛎⚿ᨐߢࠆ࿁ォⷺᐲߩ⸘᷹
⚿ᨐࠍFig. 10ߦ␜ߔ㧚ߎߩታ㛎⚿ᨐߪ㧘ࡦࠨߩZ
ゲᣇะߦ⚂81Nߩജࠍ↪ߐߖߚ⁁ᘒߢ࿁ォṖࠅࠍ
↢ߓߐߖߚ⚿ᨐߢࠆ㧚ߎߩ⚿ᨐߦ߅ߡ㧘ታ㓙ߩ
࿁ォⷺᐲߣ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߦࠃࠅ᳞ߚ
࿁ォⷺᐲߢߪᦨᄢ0.84ᐲߩ⺋Ꮕ߇↢ߓߡࠆ㧚ߎߩ
⺋Ꮕ߽ਗㅴṖࠅߢ↢ߓߚ⺋Ꮕߣห᭽ߦ㧘ቯ⟵ߒߚജ ߩ↪ὐߣฦࡦࠨ⚛ሶߢߩታ㓙ߩജߩ↪ὐߩߕ ࠇߦࠃࠆᓇ㗀ߣฦࡦࠨ⚛ሶߩ㜞ߐߩ߫ࠄߟ߈ߦࠃ ࠆᓇ㗀ߢࠆߣ⠨߃ࠄࠇࠆ㧚ߒ߆ߒ㧘ធ⸅‛ߦ࿁
ォṖࠅ߇↢ߓߚ႐วߩ࿁ォⷺᐲࠍචಽߥ♖ᐲߢ᳞
ࠆߎߣߢ߈ࠆߣ⸒߃㧘࿁ォṖࠅ߇ᬌ⍮น⢻ߢࠆߎ ߣࠍ␜ߒߡࠆ㧚
એߩ⚿ᨐࠃࠅ㧘ᧄࡦࠨߪ㧘↪ജ㧘↪ࡕ
ࡔࡦ࠻ߩ⸘᷹ߔࠆߎߣ߇น⢻ߢࠅ㧘ࡑࠢࡠߥṖࠅ ߩᬌ߇น⢻ߢࠆߎߣ߇␜ߐࠇߚ㧚
Fig. 10. Measured result of rotation angle
%CUGߩᬌ⸽
ࡒࠢࡠߥṖࠅ߇↢ߓߡࠆ▎ᚲߦᵈ⋡ߔࠆߣ㧘ࡒ
ࠢࡠߥṖࠅߪਗㅴṖࠅߣ࿁ォṖࠅߣߩᏅ⇣ߪߥ㧚 ᓥߞߡ㧘ᧄ⺰ᢥߢߪਗㅴṖࠅᤨߩࡒࠢࡠߥṖࠅߩᬌ
ࠍߦߍ㧘⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߩലᕈ ߩᬌ⸽ࠍⴕߞߚ㧚
ቇ⠌ㆊ⒟
ࡒࠢࡠߥṖࠅᬌࠍⴕ߁೨ߦᚑߒߚ࠾ࡘ࡞
ࡀ࠶࠻ࡢࠢߩቇ⠌ࠍⴕ߁㧚ᢎᏧାภߩᚑߦߪ㧘 ᄌࡦࠨߩജࠍၮߦᚑߒߚ㧚ਗㅴṖࠅࠍ↢ߓ ߐߖࠆ੍ታ㛎ࠍⴕ㧘੍ታ㛎ߩ⚿ᨐ߆ࠄᢎᏧା
ภᢎᏧାภࠍᚑߒߚ㧚Fig. 11ߪ੍ታ㛎ߩਗㅴ⒖
േ〒㔌ߩ⸘᷹⚿ᨐߢࠅ㧘Fig. 12 ߪ੍ታ㛎ᤨߩ No.8ߩࡦࠨ⚛ሶߩZゲᣇะߩജ୯ߩࠬࡍࠢ࠻࡞
ࠣࡓߢࠆ㧚Fig. 11ߩ⚿ᨐ߆ࠄ⚂2.5⑽ߦࡑࠢࡠ ߥṖࠅ߇↢ߓߡࠆߎߣ߇ࠊ߆ࠆ㧚ߘߒߡ㧘Fig. 12 ߩ⚿ᨐ߆ࠄ㧘2.2⑽߆ࠄ2.5⑽߹ߢߩ㑆ߦᝄേ߇↢ߓ ߡࠆߎߣ߇ࠊ߆ࠆ㧚ߎߩ㑆ߦࡒࠢࡠṖࠅ߇߅߈ߡ
ࠆߎߣ߇ࠊ߆ࠆ㧚ߎߩ⚿ᨐࠃࠅᢎᏧାภߩജࠍ
ᚑߒቇ⠌ࠍⴕߞߚ㧚࠾ࡘ࡞ࡀ࠶࠻ࡢࠢߩቇ
⠌ߦߪ㧘ㅙᰴᦝᣂቇ⠌ᴺߩ㧝ߟߢࠆࡃ࠶ࠢࡊࡠࡄ
࡚ࠥࠪࡦᴺࠍ↪ߚ㧚
ࡒࠢࡠߥṖࠅߩᬌ⚿ᨐ
ࡒࠢࡠߥṖࠅࠍᚑߒߚ࠾ࡘ࡞ࡀ࠶࠻ࡢࠢ
ߦࠃࠅᬌ⍮น⢻߆ࠍታ㛎ߦࠃࠅᬌ⸽ߔࠆ㧚
Ṗࠅᬌ⍮ߩജߪᑼ(4-1)ߩ᭽ߦቯ⟵ߒ㧘Fig. 13ߦ
0 2 4 6 8 10 12
0 2 4 6 8 10 12
Time [s]
T [degree]
Calculated Rotation Angle Actual Rotation Angle
0 2 4 6 8 10 12
0 2 4 6 8 10 12
Time [s]
T [degree]
Calculated Rotation Angle Actual Rotation Angle Calculated Rotation Angle Actual Rotation Angle Calculated Rotation Angle Actual Rotation Angle
0 1 2 3 4 5 6 7
0 10 20 30 40 50
Time [s]
D [degree]
Calculated Slip Direction Actual Slip Direction
0 1 2 3 4 5 6 7
0 10 20 30 40 50
Time [s]
D [degree]
Calculated Slip Direction Actual Slip Direction Calculated Slip Direction Actual Slip Direction Calculated Slip Direction Actual Slip Direction
0 1 2 3 4 5 6 7
0 1 2 3 4
Time [s]
Displacement [mm]
Calculated Displacement Actual Displacement
0 1 2 3 4 5 6 7
0 1 2 3 4
Time [s]
Displacement [mm]
Calculated Displacement Actual Displacement Calculated Displacement Actual Displacement Calculated Displacement Actual Displacement
Fig. 11. Measured result of displacement
Fig. 12. Spectrogram of the No. 8 sensor element’s output in Z-axis direction
␜ߔᚻ㗅ߢṖࠅᬌ⍮ࠍⴕߞߚ㧚
°¯
°®
Slip al Tranlation of
Slip Macro
Slip Micro Noslip Soutput
2 1 0
(4-1) ታ㛎⚿ᨐࠍFig. 14- Fig. 16ߦ␜ߔ㧚Fig. 14ߪᄌ
⸘ߩജ߮ COP ߩਗㅴ⒖േ〒㔌ߢࠆ㧚Fig. 15 ߪṖࠅᬌ⍮⚿ᨐߢࠆ㧚ߘߒߡ㧘Fig. 16ߪਗㅴ⒖േ
ᣇะࠍ␜ߒߡࠆ㧚ਗㅴ⒖േᣇะߪࡒࠢࡠߥṖࠅ߇ ᬌߐࠇࠆ߹ߢߪࡠߣߒߡࠆ㧚ߎࠇߦࠃࠅ㧘
ᚑߒߚ࠾ࡘ࡞ࡀ࠶࠻ࡢࠢߪࡒࠢࡠߥṖࠅࠍᬌ
⍮ߔࠆߎߣ߇ߢ߈ߡࠆ㧚߹ߚ㧘Fig. 16ߦᵈ⋡ߔࠆ ߣᓥ᧪ߩ⸅ⷡࡦࠨߢߪᬌߢ߈ߥ߆ߞߚࡒࠢࡠߥ Ṗࠅ߇↢ߓߚᤨߩṖࠅᣇะ߽ᬌߢ߈ߡࠆߎߣ߇
ࠊ߆ࠆ㧚
એࠃࠅ㧘ᧄࡦࠨࠪࠬ࠹ࡓߪࡒࠢࡠߥṖࠅߣࡑ
ࠢࡠߥṖࠅࠍㅪ⛯ߒߡᓧࠆ߇น⢻ߢࠆߎߣ߇␜
ߐࠇߚ㧚
Fig. 13. Flow chart of slip detection
Fig. 14. Measured result of COP displacement
Fig. 15. Result of slip detection Time [s]
Frequency [Hz]
0 1 2 3 4 5
0 50 100 150 200
䎐䎔䎓䎓 䎐䎛䎓 䎐䎙䎓 䎐䎗䎓 䎐䎕䎓 䎓 䎕䎓 䎗䎓
Micro-slip Macro-slip
Time [s]
Frequency [Hz]
0 1 2 3 4 5
0 50 100 150 200
䎐䎔䎓䎓 䎐䎛䎓 䎐䎙䎓 䎐䎗䎓 䎐䎕䎓 䎓 䎕䎓 䎗䎓
Micro-slip Macro-slip
0 1 2 3 4 5
0 0.5 1 1.5 2
Time [s]
Displacement [mm]
Micro-slip Macro-slip
0 1 2 3 4 5
0 0.5 1 1.5 2
Time [s]
Displacement [mm]
Micro-slip Macro-slip
0 2 4 6 8
0 1 2 3 4
Time [s]
Displacement [mm]
Calculated Displacement Actual Displacement
0 2 4 6 8
0 1 2 3 4
Time [s]
Displacement [mm]
Calculated Displacement Actual Displacement Calculated Displacement Actual Displacement Calculated Displacement Actual Displacement Slip Detection
Output Macro-slip is
generated
output 2 S
Yes
No
i A
Soutput output
Sensor element for detecting the micro-slip
is selected Slip Detection
Output Macro-slip is
generated
output 2
Soutput 2
S
Yes
No
i A Soutput Aoutput i
Soutput output
Sensor element for detecting the micro-slip
is selected Sensor element for detecting the micro-slip
is selected
0 2 4 6 8
0 0.5 1 1.5 2 2.5 3
Time [s]
Slip Detection
Fig. 16. Measured result of slip direction
㧚 ⚿⸒
ᧄ⎇ⓥߢᓧࠄࠇߚ⚿⺰ߪએਅߩㅢࠅߢࠆ㧚 1㧚 ᧄ⎇ⓥߢ⹜ߒߚಽᏓဳ⸅ⷡࡦࠨߪ㧘ᚑߒ
ߚ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߦࠃࠅ↪ߔࠆ 3 ಽജߩಽᏓᖱႎ߇⸘᷹ߢ߈㧘↪ߔࠆജ㧘ࡕ
ࡔࡦ࠻ࠍ⸘᷹ߔࠆߎߣ߇ߢ߈ࠆ㧚
2㧚 ᧄ⎇ⓥߢ⹜ߒߚಽᏓဳ⸅ⷡࡦࠨߪ㧘ᚑߒ ߚ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߦࠃࠅਗㅴṖࠅࠍ
↢ߓߚធ⸅‛ߩ⒖േ〒㔌㧘⒖േᣇะࠍ⸘᷹ߔ ࠆߎߣ߇น⢻ߢࠆߚ㧘ਗㅴㆇേࠍ⹏ଔߢ߈ ࠆ㧚
3㧚 ᧄ⎇ⓥߢ⹜ߒߚಽᏓဳ⸅ⷡࡦࠨߪ㧘ᚑߒ ߚ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߦࠃࠅ࿁ォṖࠅࠍ
↢ߓߚធ⸅‛ߩ࿁ォⷺᐲࠍ⸘᷹ߔࠆߎߣ߇น
⢻ߢࠆߚ㧘࿁ォㆇേࠍ⹏ଔߢ߈ࠆ㧚 4㧚 ᧄ⎇ⓥߢ⹜ߒߚಽᏓဳ⸅ⷡࡦࠨߪ㧘ᚑߒ
ߚ⸅ⷡᖱႎಣℂࠕ࡞ࠧ࠭ࡓߦࠃࠅࡒࠢࡠߥṖ ࠅࠍᬌߢ߈㧘ࡑࠢࡠߥṖࠅ߇↢ߓࠆ੍᷹ߔࠆ ߎߣ߇ߢ߈ࠆ㧚
ߥ߅ᧄ⎇ⓥߩ৻ㇱߪ㧘ᣣᧄቇⴚᝄ⥝ળ⑼ቇ⎇ⓥ⾌
ഥ㊄(․⎇ⓥຬᅑബ⾌㧘⺖㗴⇟ภ 19-5611)߮
(⽷) ↥ቇ⎇ⓥ㐿⊒ᡰេᬺߩេഥࠍฃߌߚ㧚⸥ߒ ߡ⻢ᗧࠍߔ㧚
ෳ⠨ᢥ₂
1) ޘᧁᄢテ㧘ೣᰴବ㇢㧘㜞ጤᒄ㧘“↢ᵴᡰេࡠࡏ࠶
࠻ߩߚߩജᬌဳ࠰ࡈ࠻⸅ⷡࡦࠨߩ㐿⊒’’㧘ᣣ ᧄᯏ᪾ቇળ⺰ᢥ㓸 C✬㧘70-689㧘77-82 (2004).
2) ᄢጟඳ㧘“ജಽᏓߣߖࠎᢿജߩหᤨ⸘᷹ࠍน⢻ߣ ߔࠆਃゲ⸅ⷡࡦࠨ’’㧘ᣣᧄᯏ᪾ቇળ㧘104-901㧘 372-373 (2001).
3) Antonio Bicci and Vijay Kumar, “Robotic grasping and contact: A review”, In Proceedings of the 2000 IEEE International Conference on Robotics and Automation, 348–353, (2001).
4) ೨Ꮉੳ㧘̌⸅ⷡᖱႎࠍ↪ߒߚᄙᜰࡂࡦ࠼ߦࠃࠆᛠ
ីᠲࠅ̍㧘ᣣᧄࡠࡏ࠶࠻ቇળ㧘18-6㧘776-781 (2000).
5) ะᤐ㧘⟜ᔒஉ㧘ട⮮㓁㧘ઁ61ฬ㧘ᗵࡦࠨ ߩ㐿⊒ᦨ೨✢㧘(ᑼળ␠ ࠛ࠹ࠖࠛࠬ㧘᧲੩㧘 2005)㧘pp.299-309.
6) E.G.M. Holweg and W. Jongkind㧘“Object Recognition Using a Tactile Matrix Sensor’’㧘Proceedings of European Robotics and Intelligent System Comference㧘1379-1383㧘 (1994).
7) ᳗ᷡ㧘દ⮮⟵ౖ㧘⍫ፒ⺈㧘ᮘญసᏆ㧘㒙ㇱᥙ㧘ੑ㊀ චሼ᭴ㅧߦၮߠߊዊဳ6ಽജജⷡࡦࠨߩ㐿⊒㧘ᣣᧄ ࡠࡏ࠶࠻ቇળ㧘22-3㧘361-369 (2004).
8) H. Shinoda㧘M. Uehara and S. Ando㧘A Tactile Sensor using Three-Dimensional Structure㧘Proceedings of the 1992 IEEE International Conference on Robotics and Automation㧘217-220 (1992).
9) િ㧘⮮ၴാ㓶㧘⮳↰ື㇢㧘̌㔚⏛⺃ዉߦၮߠߊ
ਃゲ⸅ⷡࡦࠨߣߘߩ․ᕈ̍㧘ᣣᧄᯏ᪾ቇળ⺰ᢥ㓸 C
✬㧘71-703㧘920-927 (2005).
10) ጊੱ㧘Ḵ↰ᤩ৻㧘᫃ᧄਯ㧘Ꮉ⋥᮸㧘⥪┨㧘̌శ ቇᑼਃᰴర⸅ⷡࡦࠨߩࡠࡏ࠶࠻ࡈࠖࡦࠟ߳ߩㆡ↪̍㧘 ࡠࡏ࠹ࠖࠢࠬࡔࠞ࠻ࡠ࠾ࠢࠬ⻠Ṷળ⻠Ṷ⺰ᢥ㓸㧘 2005㧘1P1-N-104 (2005).
11) ᄙ↰ᵏᓼ㧘↰ᢕผ㧘⚦↰⠹㧘̌ⷞ⸅ⷡࠍᜬߟࡠࡏ࠶
࠻ࡂࡦ࠼ߦࠃࠆṖࠅߩ₪ᓧߣᜬߜߍേߩታ
̍㧘ࡠࡏ࠹ࠖࠢࠬ㨯ࡔࠞ࠻ࡠ࠾ࠢࠬ⻠Ṷળ⻠Ṷ⺰ᢥ㓸㧘 2006㧘2P2-B20 (2006).
12) ጊᙗ৻㧘ᚭᎹ㆐↵㧘㨬↢↪ࡦࠨߣ⸘᷹ⵝ⟎㨭㧘㧔ࠦ
ࡠ࠽␠㧘᧲੩㧘2000㧕㧘110-139.
13) C. Melchiorri㧘Tactile Sensing for Robotic Manipulation㧘 Lecture Notes in Control and Information Sciences㧘270㧘 75-102 (2001).
0 2 4 6 8
0 10 20 30 40 50
Time [s]
Slip Direction [degree]
Calculated Slip Direction Actual Slip Direction
0 2 4 6 8
0 10 20 30 40 50
Time [s]
Slip Direction [degree]
Calculated Slip Direction Actual Slip Direction Calculated Slip Direction Actual Slip Direction Calculated Slip Direction Actual Slip Direction


![Fig. 15. Result of slip detection Time [s]Frequency [Hz]012345050100150200䎐䎔䎓䎓䎐䎛䎓䎐䎙䎓䎐䎗䎓䎐䎕䎓䎓䎕䎓䎗䎓Micro-slipMacro-slipTime [s]Frequency [Hz]012345050100150200䎐䎔䎓䎓䎐䎛䎓䎐䎙䎓䎐䎗䎓䎐䎕䎓䎓䎕䎓䎗䎓Micro-slipMacro-slip01234500.511.52Time [s]Displacement [mm]Micro-slipMacro-slip](https://thumb-ap.123doks.com/thumbv2/123deta/9768956.1852960/8.892.494.797.537.806/FigResult䎔䎓䎓䎐䎛䎓䎐䎙䎓䎐䎗䎓䎐䎕䎓䎓䎕䎓䎗䎓MicroslipMacroslipTime䎔䎓䎓䎐䎛䎓.webp)

