平成 23 年度
マルチ GNSS 解析技術等の開発にむけた マルチ GNSS 解析システムの基本設計業務
基本設計書
2012 年 3 月 9 日
国土交通省 国土地理院
i
平成23年度 マルチGNSS解析技術等の開発にむけた マルチGNSS解析システムの基本設計業務
基本設計書 目次
1. 概要... 1-1 1.1. 本書について... 1-1 1.2. プロジェクトの概要... 1-1 2. システム構成... 2-1 2.1. システム全体構成... 2-1 2.1.1. 公共測量... 2-2 2.1.2. 国土地理院GEONET高速化(GEONETモード)... 2-4 2.1.3. 研究者向け... 2-6 2.1.4. 測位モード... 2-7 2.2. 対応プラットフォーム... 2-10 2.3. ディレクトリ構成... 2-11 3. 外部インタフェース... 3-1 3.1. 入力データ... 3-1 3.2. 出力データ... 3-7 3.3. 通信インタフェース... 3-8 4. 内部インタフェース... 4-1 5. システム方式... 5-1 5.1. 自動データ取得方式(スケジューラ)... 5.1-1 5.2. 自動取得データの更新確認(測位解析時)... 5.2-1 5.3. 測位方式... 5.3-1 5.3.1. 単独測位... 5.3.1-1 5.3.2. DGPS ... 5.3.2-1 5.3.3. スタティック... 5.3.3-1 5.3.4. キネマティック... 5.3.4-1 5.3.5. 複数基線解析... 5.3.5-1 5.3.6. PPP(精密単独測位)... 5.3.6-1 5.3.7. PPP-AR... 5.3.7-1 5.3.8. GEONETモード... 5.3.8-1
5.4. ファイル管理方式 ... 5.4-1 5.5. 処理条件管理方式 ... 5.5-1 5.6. メッセージ方式 ... 5.6-1 5.7. 複数衛星・信号利用方式 ... 5.7-1 5.8. 電離層補正方式 ... 5.8-1 5.9. 複数信号対応OTF方式 ... 5.9-1 5.10. 時系・座標系接続方式 ... 5.10-1 5.11. IFB・DCB補正方式 ... 5.11-1 5.12. 推定値管理 ... 5.12-1 5.13. パラメータ推定方式 ... 5.13-1 6. アルゴリズム仕様 ... 6-1 6.1. 測位アルゴリズム基礎 ... 6.1-1 6.2. 測位アルゴリズム応用 ... 6.2-1 6.2.1. 推定方式 ... 6.2.1-1 6.2.2. 複数基線解析(公共測量/GEONET) ... 6.2.2-1 6.2.3. PPP-AR ... 6.2.3-1 6.2.4. GEONETモード ... 6.2.4-1 7. アプリケーション仕様 ... 7-1 8. ファイル仕様 ... 8-1 8.1. 外部インタフェースファイル ... 8.1-1 8.2. 内部インタフェースファイル ... 8.2-1 9. 非機能仕様... 9-1 9.1. 性能 ... 9-1 9.2. データ容量 ... 9-2 9.3. 拡張性 ... 9-3
別紙1 関数仕様書 ... A1-1
1-1
1. 概要
1.1. 本書について
本書は、「平成 23年度マルチGNSS解析技術等の開発にむけたマルチ GNSS解析シ ステムの基本設計業務」の第6条(2)項に基づき作成する基本設計書である。
1.2. プロジェクトの概要
国土地理院では、国土交通省総合技術開発プロジェクト「高度な国土管理のための複 数の衛星測位システム(マルチ GNSS)による高精度測位技術の開発」(平成 23~26 年度)として、米国の「GPS」をはじめ、日本の準天頂衛星「QZSS」、ロシアの
「GLONASS」、EU の「Galileo」といった各国の衛星測位システムのデータを統合的 に利用したマルチGNSS高精度測位技術の開発及び標準化を進めている。
マルチ GNSSによる高精度測位が可能となった場合、観測点上空の多数の衛星が同時 に利用できるようになるため、GPS のみでは測位が困難な地域でも測位が可能になると 期待される。さらに新たな周波数帯のデータが追加されることから、より短い時間で高 精度測位が可能になると期待されている。しかし、現状ではマルチGNSSによる高精度 測位の開発や標準化は進んでおらず、測量分野においては、GPS のみによる測位よりも 効率的なマルチGNSSによる測量が利用できない状態にある。このため、マルチGNSS のデータを統合的に利用して、短時間に高精度の位置情報を取得し、測量等に適用する ことが可能なマルチGNSS解析システム(以下、「本システム」という。)の開発を進め る。なお、本システムの適用範囲には、ハードウェアは含まれない。
本システムには、既存の測位用 GPS 解析ソフトウェアに搭載されている機能に加え て、異なる衛星測位システム間の系統誤差等を軽減する方法や新しい周波数帯のデータ を利用する方法等、測位精度の安定性及び信頼性を確保しつつ迅速に測位解を得ること が可能な測位計算手法及びアルゴリズム(以下、計算手法という。)を組み込むことと し、これらの計算手法等について、現在、別途、調査検討業務を実施中である。
本作業は、マルチGNSS高精度測位技術の開発及び標準化のため、別途実施中の調査 検討業務も踏まえつつ、本システムに対する機能要求や性能要求等から基本設計を実施 し、平成 24 年度に実施予定の「マルチ GNSS 解析システムの詳細設計及び開発業務
(仮称)」の調達に使用することが可能な基本設計書を作成することを目的とする。な お、本システムは、マルチ GNSS高精度測位技術の標準化のためのシミュレーションや 現地実証実験に利用する他、ソフトウェアをオープンソースライセンスの下で公開し、
電子基準点データの解析を含む測地学や測量分野での利用も想定している。
2. システム構成 2.1. システム全体構成
本システムは、オープンソフトの RTKLIB(http://www.rtklib.com)を活用しつつ、
マルチ GNSSを統合的に利用する測量方法の標準化に必要な機能を装備する。本システ ムが想定するユーザは、
①公共測量を行う事業者(都市部、山間部等での測量可能エリアの拡大)
②国土地理院(GEONETによる地殻変動情報公表までの時間短縮)
③測位、測量、地球科学関連の研究者
である。本システムは、これら要求レベルが異なるユーザに対応するため、幾つかのプ ログラムを組み合わせて機能を実現する。
2-2 2.1.1. 公共測量
公共測量では、スタティック測位、キネマティック測位、RTK 測位、ネットワーク型 RTK測位(VRS方式/FKP 方式)が利用されている。本システムでは、FKP 方式以外 を対象とする。スタティック測位における複数基線解析では、座標が既知の点から、順 次基線解析によって各地点の座標と誤差を決定したのち、網平均する方法もあるが、本 システムでは全てのデータを同時処理し、1ステップで計算する。
スタティック測位のシステム構成と RTK/VRS のシステム構成を、それぞれ図
2.1.1-1 と図 2.1.1-2 に示す。リアルタイム処理時に保存したデータを再生してリアル
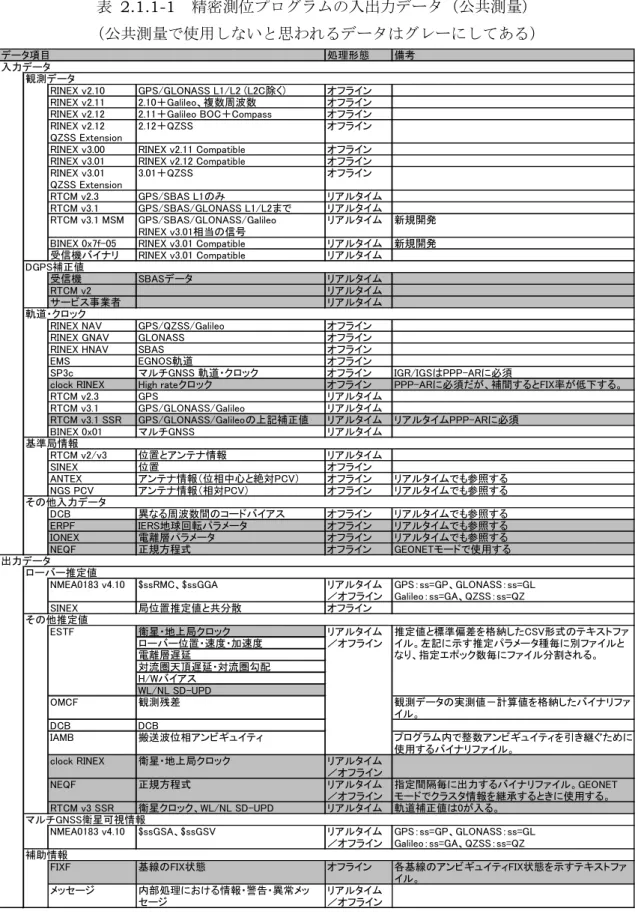
タイム処理模擬を行う場合は、精密測位プログラムの入力に、保存したデータファイル を設定する。リアルタイム/オフライン処理における精密測位プログラムの入出力デー タ項目を表 2.1.1-1に示す。
複数観測点
複数観測点データ
精密測位 プログラム
スカイプロット
測位結果 プロット 記録
図 2.1.1-1 スタティック測位のシステム構成
VRSデータ 基地局
無線 回線 ストリーム
分配 プログラム
精密測位 プログラム 配信
業者 Rover
精密測位
プログラム Rover Serial
TCP Server
TCP
Client Serial
Serial Ntrip
Client
図 2.1.1-2 RTK/VRSのシステム構成
表 2.1.1-1 精密測位プログラムの入出力データ(公共測量)
(公共測量で使用しないと思われるデータはグレーにしてある)
データ項目 処理形態 備考
入力データ 観測データ
RINEX v2.10 GPS/GLONASS L1/L2 (L2C除く) オフライン RINEX v2.11 2.10+Galileo、複数周波数 オフライン RINEX v2.12 2.11+Galileo BOC+Compass オフライン RINEX v2.12
QZSS Extension 2.12+QZSS オフライン RINEX v3.00 RINEX v2.11 Compatible オフライン RINEX v3.01 RINEX v2.12 Compatible オフライン RINEX v3.01
QZSS Extension 3.01+QZSS オフライン RTCM v2.3 GPS/SBAS L1のみ リアルタイム RTCM v3.1 GPS/SBAS/GLONASS L1/L2まで リアルタイム RTCM v3.1 MSM GPS/SBAS/GLONASS/Galileo
RINEX v3.01相当の信号
リアルタイム 新規開発 BINEX 0x7f-05 RINEX v3.01 Compatible リアルタイム 新規開発 受信機バイナリ RINEX v3.01 Compatible リアルタイム
DGPS補正値
受信機 SBASデータ リアルタイム
RTCM v2 リアルタイム
サービス事業者 リアルタイム
軌道・クロック
RINEX NAV GPS/QZSS/Galileo オフライン
RINEX GNAV GLONASS オフライン
RINEX HNAV SBAS オフライン
EMS EGNOS軌道 オフライン
SP3c マルチGNSS 軌道・クロック オフライン IGR/IGSはPPP-ARに必須
clock RINEX High rateクロック オフライン PPP-ARに必須だが、補間するとFIX率が低下する。
RTCM v2.3 GPS リアルタイム
RTCM v3.1 GPS/GLONASS/Galileo リアルタイム
RTCM v3.1 SSR GPS/GLONASS/Galileoの上記補正値 リアルタイム リアルタイムPPP-ARに必須
BINEX 0x01 マルチGNSS リアルタイム
基準局情報
RTCM v2/v3 位置とアンテナ情報 リアルタイム
SINEX 位置 オフライン
ANTEX アンテナ情報(位相中心と絶対PCV) オフライン リアルタイムでも参照する NGS PCV アンテナ情報(相対PCV) オフライン リアルタイムでも参照する その他入力データ
DCB 異なる周波数間のコードバイアス オフライン リアルタイムでも参照する
ERPF IERS地球回転パラメータ オフライン リアルタイムでも参照する
IONEX 電離層パラメータ オフライン リアルタイムでも参照する
NEQF 正規方程式 オフライン GEONETモードで使用する
出力データ ローバー推定値
NMEA0183 v4.10 $ssRMC、$ssGGA リアルタイム
/オフライン GPS:ss=GP、GLONASS:ss=GL Galileo:ss=GA、QZSS:ss=QZ
SINEX 局位置推定値と共分散 オフライン
その他推定値
ESTF 衛星・地上局クロック リアルタイム
ローバー位置・速度・加速度 /オフライン
電離層遅延
対流圏天頂遅延・対流圏勾配 H/Wバイアス
WL/NL SD-UPD
OMCF 観測残差 観測データの実測値-計算値を格納したバイナリファ
イル。
DCB DCB
IAMB 搬送波位相アンビギュイティ プログラム内で整数アンビギュイティを引き継ぐために
使用するバイナリファイル。
clock RINEX 衛星・地上局クロック リアルタイム
/オフライン
NEQF 正規方程式 リアルタイム
/オフライン
指定間隔毎に出力するバイナリファイル。GEONET モードでクラスタ情報を継承するときに使用する。
RTCM v3 SSR 衛星クロック、WL/NL SD-UPD リアルタイム 軌道補正値は0が入る。
マルチGNSS衛星可視情報
NMEA0183 v4.10 $ssGSA、$ssGSV リアルタイム
/オフライン
GPS:ss=GP、GLONASS:ss=GL Galileo:ss=GA、QZSS:ss=QZ 補助情報
FIXF 基線のFIX状態 オフライン 各基線のアンビギュイティFIX状態を示すテキストファ
イル。
メッセージ 内部処理における情報・警告・異常メッ セージ
リアルタイム
/オフライン
推定値と標準偏差を格納したCSV形式のテキストファ イル。左記に示す推定パラメータ種毎に別ファイルと なり、指定エポック数毎にファイル分割される。
2-4
2.1.2. 国土地理院GEONET高速化(GEONETモード)
(1) S3(緊急解)の高速化
本システムを、GEONET の測位処理時間短縮を目的として使用する場合のシステム
構成を図 2.1.2-1に示す。
このモードでは、図の左半分において、解析戦略第4版に準拠した3階層方式(バッ クボーンクラスタ測位、地域クラスタ(基本網)測位、地域クラスタ(追加網)測位を 行う。測位モードは連続スタティック測位を想定している。
連続スタティック測位とは、正規方程式を使用したバッチシーケンシャルフィルタで ある。具体的には、正規方程式に対して観測更新とシステムノイズ付加を順次連続的に 行い、必要なタイミングで正規方程式や推定値・共分散を出力する。本手法では、全パ ラメータがPiece-wise constant又はPiece-wise linearとして推定される。
地域クラスタの処理は、前段処理の正規方程式をストリーム分配プログラムで分配す ることで並列処理を可能とする。このため、負荷分散目的で、バックボーンクラスタの 処理と各地域クラスタの処理を別々の計算機で実行することも可能である。ストリーム 配信を行うため、ファイルシステム共有の設定は不要で、ポートを空ける。
連続スタティック測位は、通常はアンビギュイティが FIX した状態を維持するが、大 きな地殻変動が発生すると FIX が外れる。このとき、初期値を更新することで、早期に FIX できるため、図の右半分において、準スタティック測位と平行して、PPP を実行し ておき、大きな地殻変動が発生して FIX しなくなった基線の局位置を更新する。なお、
小さな水平移動の場合は、FIX が外れない可能性があるため、PPP の測位結果の変動も モニターしておく。
全体監視プログラムは、これらをコントロールするために存在する。このプログラム では、上記制御の他、局を選択して、測位結果プロットプログラムで衛星捕捉状態のス カイプロットや測位結果(時系列・二次元)を表示するほか、測位結果広域プロットプ ログラムでGEONET全体の水平測位結果、垂直測位結果、FIXマップを表示できる。
GEONET モードの入出力データは表 2.1.1-1 に対して NEQF と RTCM v3.1 SSR
の入力(第2版で対応)を追加した状態となる。また、GEONET モードでは、全体監 視プログラムとこれより起動される表示プログラムを除いて、全てのプログラムは CUI 版を使用する。
連続スタティック測位やPPPの詳細は、5章のシステム方式と6章のアルゴリズム仕 様に記載した。
観測データ
軌道・時計パラメータ バックボーンクラスタ
地域クラスタ(基本網) 基本網用
連続Static
連続Static PPP 追加網用
NEQの分配
NEQの分配 PPP
連続Static
IGU軌道暦
(自動取得)
地域クラスタ(追加網)
連続スタティック測位 地殻変動監視用PPP
精密測位 プログラム
ストリーム分配 プログラム
バックボーンクラスター
電子基準点データ集配信設備 地域
クラスター1
地域
クラスター2 地域 クラスターN
全体監視プログラム
スカイプロット 測位結果 プロット
測位結果 広域プロット 精密測位
プログラム ストリーム分配
プログラム
精密測位 プログラム 精密測位
プログラム
精密測位 プログラム ストリーム分配
プログラム
図 2.1.2-1 GEONETモードシステム構成
(2) F3、R3、Q3の性能・精度保証
マルチ GNSS対応することで、F3(最終解)、R3(速報解)、Q3(迅速解)は、これ までの解析に比べて計算時間がかかることが予想されるが、最新の高速処理アルゴリズ ム「6.2.1(3)b」を導入することで、性能低下を最小限に抑える。
精度保証については、Berneseと同じ最小二乗法の適用、Berneseと同一のモデルの
2-6
適用(6.2.4 参照)、マルチ GNSS 利用で既存解析戦略より多くのデータを使用するこ とにより保証できるものと考える。
2.1.3. 研究者向け
本システムは、RTKLIB の思想を踏襲し、プログラムを組み合わせて様々な目的を実 現することができる。公共測量と GEONET モードは、2.1.1 及び 2.1.2 節を、それ以
外はRTKLIBのマニュアルを参照いただきたい。
2.1.4. 測位モード
本システムがサポートする測位モードとユーザー像を表 2.1.4-1 に示す。右側の
「公」が公共測量ユーザ、「地」がGEONETユーザ(国土地理院)向けとなっている。
研究者向けは全機能となる。「R」はRTKLIBに存在する機能だが、本システムではマル
チGNSS、及び複数周波数対応を行う。各測位モードの詳細は5~6章に示す。
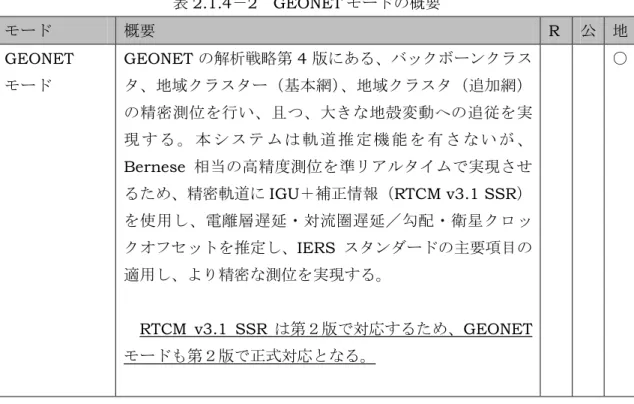
また、測位モードの一つではないが、本システムがサポートする GEONET モードの
概要を表2.1.4-2に示す。
表 2.1.4-1 本システムがサポートする測位モード(1/2)
測位モード 概要 R 公 地
単独測位 ローバーにおいて、擬似距離、又は擬似距離の電離層フ リー線形結合データを用いて、受信機単体で測位する。
○
単独DGPS ローバーで SBAS からの、補正データを受信し、受信機 単独でDGPSを行う。
○
DGPS 基地局から擬似距離の補正情報を受信し、ローバーで受 信した擬似距離を補正して、単独測位を行う。この方式 では基地局とローバーで同一の電離層遅延量・対流圏遅 延量を想定するため、基地局からローバーまでの距離は 短距離に限られる。通常1波での測位となる。
○
RTK 基地局から擬似距離・搬送波位相を受信し、搬送波位相 の整数アンビギュイティ決定を行って、精密相対測位を 行う。キネマティック及びスタティックモードを有す る。長基線では、電離層遅延・対流圏遅延/勾配の推定 を行う。なお、基地局として事業者が提供する VRS デー タも利用できる。
○
複数基線解析 基地局を複数局利用し、ローバー位置は網平均を求め、
ジ オ イ ド 高 補 正 、 セ ミ ・ ダ イ ナ ミ ッ ク 補 正 を 行 っ て
JGD2000成果相当への変換を行う。本システムの網平均
は、複数基線の NEQを一つの行列に入れて、最小二乗法 で解く方法をとる。
○
2-8
表2.1.4-1 本システムがサポートする測位モード(2/2)
測位モード 概要 R 公 地
PPP リアルタイム処理では、RTCM3.1 SSR を利用して精密 単独測位を行う。後処理では、RTCM3.1 SSR の他に、
国際 GNSS サービスが提供する精密暦とクロックを使用 することができる。電離層遅延・対流圏遅延の推定を行 う。
○
PPP-AR オフライン処理は、前準備として、Wide-lane SD-
UPD(Single Difference Uncalibrated Phase Delay)
→Narrow-lane SD-UPDの順にSD-UPDを求める。こ れらを求める際、通常は、全地球的なネットワークを使 用してマルチGNSS軌道決定を行うが、本システムは衛 星の位置を精密暦で固定して求める。従って、オフライ ン処理は、精密暦が提供されていない衛星システムでは 利用できない。他の衛星システムは以下のリアルタイム 処理での対応となる。
リアルタイム処理は、CNES の PPP-WIZARD が生成
するRTCM3.1 SSRデータを利用してPPP-ARを行う。
ただし、PPP-ARの上記機能は、第1版では、研究ベー スで実装し、検証が終了したのち、第2版で正式リリー スとする。
○
表2.1.4-2 GEONETモードの概要
モード 概要 R 公 地
GEONET モード
GEONET の解析戦略第4版にある、バックボーンクラス
タ、地域クラスター(基本網)、地域クラスタ(追加網)
の精密測位を行い、且つ、大きな地殻変動への追従を実 現 す る 。 本 シ ス テ ム は 軌 道 推 定 機 能 を 有 さ な い が 、
Bernese 相当の高精度測位を準リアルタイムで実現させ
るため、精密軌道にIGU+補正情報(RTCM v3.1 SSR)
を使用し、電離層遅延・対流圏遅延/勾配・衛星クロッ クオフセットを推定し、IERS スタンダードの主要項目の 適用し、より精密な測位を実現する。
RTCM v3.1 SSR は第2版で対応するため、GEONET
モードも第2版で正式対応となる。
○
2-10 2.2. 対応プラットフォーム
対応プラットフォームを以下の通りとする。GUI ツールとして Qt を選択したポイン トは2 点あり、①同一プログラムソースでLinux及びWindows7 に対応でき、画面関 連のプログラムソースを二重に管理する必要がないこと、②フリーに入手できるツール であることによる。
項目 対応範囲
OS Linux及びWindows7、いずれも64bit版
プログラム言語 C及びC++
GUIツールキット Qt(GPL版、又はLGPL版)
参考URL:http://qt.nokia.com/title-jp/
開発環境 Qt Creator、又はEclipse(※)
コンパイラはWindows7ではMinGW、
Linuxではgccとなる。
GUIの表示言語 日本語と英語に対応
▲具体的な切り替え方法も設計する マニュアル 日本語版と英語版を用意する マニュアルの要約版 日本語版と英語版を用意する
※Windows7環境下ではMicrosoft Visual Studio(コンパイラはMicrosoftコンパイ
ラ又はIntelコンパイラ)も使用可。
2.3. ディレクトリ構成
本システムのディレクトリ構成を以下に記す。RTKLIB と同様に、本システムのアプ リケーションは、bin ディレクトリ内の実行ファイルを起動するだけで、何ら設定なし で起動する。このとき、自動取得データ格納ディレクトリは下記の/auto、処理条件/
結果格納ディレクトリは下記の/usrdに設定される。
また、マルチユーザ向けに、自動取得データ格納ディレクトリと処理条件/結果格納 ディレクトリは、アプリケーション起動時の環境変数 ATDATA 及び USRDIR で設定を 変更することができる。これらディレクトリの詳細は5.4.2節に記載した。
本システム名_<ver>
/bin 本システムのアプリケーション(実行ファイル)
/src 本システムのソース(マルチGNSS対応高精度測位ライブラリ)
/app 本システムの画面アプリのソース /lib 本システムで使用するフリーライブラリ
/rtklib rtklib /doc マニュアル
/db 観測点情報ファイル、受信機コマンド、定数データ、
GLONASSハードウェアバイアス、GLONASS IFB係数、
観測誤差モデル係数(a、b)、1/4位相補正テーブル等の データベース格納ディレクトリ
/auto データ格納ディレクトリ(サンプルデータ入り)
/usrd ユーザディレクトリ
3-1 3. 外部インタフェース
本システムと外部とのインタフェースを記す。
3.1. 入力データ
本システムの外部入力データを次ページより記す。
3.1.1. 観測データ
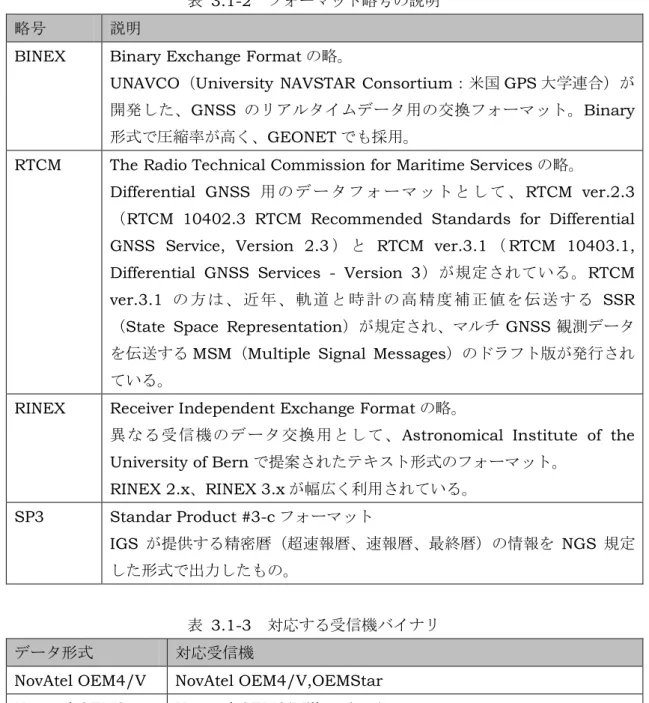
本システムにおいて取得できる観測データの形式を検討した。検討の結果、以下をサ ポートする。また、表 3.1-1 中に出現するフォーマット略号の説明を表 3.1-2 に、対 応する受信機バイナリフォーマットを表 3.1-3に示す。
表 3.1-1 サポートする観測データ形式
フォーマット
/バージョン
格納内容 処理形態 備考
RINEX v2.10 GPS/GLONASS L1/L2 (L2C除く) オフライン
RINEX v2.11 2.10+Galileo、複数周波数 オフライン
RINEX v2.12 2.11+Galileo BOC+Compass オフライン
RINEX v2.12 QZSS Extension
2.12+QZSS オフライン 新規
RINEX v3.00 RINEX v2.11 Compatible オフライン
RINEX v3.01 RINEX v2.12 Compatible オフライン
RINEX v3.01 QZSS Extension
3.01+QZSS オフライン 新規
RTCM v2.3 GPS/SBAS L1のみ
Message type 18/19
リアルタイム
RTCM v3.1 GPS/SBAS/GLONASS L1/L2まで
Message type 1002/1004/1010 /1012
リアルタイム
RTCM v3.1 MSM Message type
1071-1077 (GPS/SBAS) 1081-1087 (GLONASS) 1091-1097 (Galileo) 信号はRINEX v3.01相当
リアルタイム 新規
BINEX 0x7f-05 RINEX v3.01 Compatible
(GPS/SBAS/GLONASS/Galileo/
Compass/QZSS対応)
リアルタイム 新規
受信機バイナリ RINEX v3.01 Compatible リアルタイム
3-3
表 3.1-2 フォーマット略号の説明
略号 説明
BINEX Binary Exchange Formatの略。
UNAVCO(University NAVSTAR Consortium:米国GPS大学連合)が 開発した、GNSS のリアルタイムデータ用の交換フォーマット。Binary 形式で圧縮率が高く、GEONETでも採用。
RTCM The Radio Technical Commission for Maritime Servicesの略。
Differential GNSS 用 の デ ー タ フ ォ ー マ ッ ト と し て 、RTCM ver.2.3
(RTCM 10402.3 RTCM Recommended Standards for Differential GNSS Service, Version 2.3) と RTCM ver.3.1(RTCM 10403.1, Differential GNSS Services - Version 3)が規定されている。RTCM ver.3.1 の 方 は 、 近 年 、 軌 道 と 時 計 の 高 精 度 補 正 値 を 伝 送 す る SSR
(State Space Representation)が規定され、マルチ GNSS観測データ を伝送するMSM(Multiple Signal Messages)のドラフト版が発行され ている。
RINEX Receiver Independent Exchange Formatの略。
異なる受信機のデータ交換用として、Astronomical Institute of the
University of Bernで提案されたテキスト形式のフォーマット。
RINEX 2.x、RINEX 3.xが幅広く利用されている。
SP3 Standar Product #3-cフォーマット
IGS が提供する精密暦(超速報暦、速報暦、最終暦)の情報を NGS 規定 した形式で出力したもの。
表 3.1-3 対応する受信機バイナリ
データ形式 対応受信機
NovAtel OEM4/V NovAtel OEM4/V,OEMStar NovAtel OEM3 NovAtel OEM3(Millennium)
u-blox u-blox LEA-4T,5T,6T
Superstar II NovAtel Superstar II
Hemisphere Hemisphere Crescent/Eclipse
SkyTraq SkyTraq S1315F
GW10 Furuno GW-10-II/III
Javad JAVAD GRIL/GREIS
3.1.2. DGPS補正値
Differential GPS は、擬似距離を用いた測位技術であり、本システムでは、RTKLIB
がサポートする範囲でサポートする。すなわち、対象衛星システムは GPS のみであり、
入力データは以下のみとなる。
表 3.1-4 サポートするDGPS補正値
フォーマット
/バージョン
格納内容 処理形態 備考
RTCM v2.3 DGPS補正値(Message type 1/9) リアルタイム
受信機バイナリ SBASから受信したDGPS補正値 リアルタイム
3-5 3.1.3. 暦・時計
本システムがサポートする衛星の軌道暦・時計(クロックオフセット)を以下に記す。
表 3.1-5 サポートする軌道暦・時計
フォーマット
/バージョン
格納内容 処理形態 備考
RINEX NAV v2/v3 GPS/QZSS/Galileo オフライン
RINEX GNAV v2/v3 GLONASS オフライン
RINEX HNAV v2/v3 SBAS オフライン
EMS v2.0 EGNOS軌道 オフライン
SP3c マルチGNSSの軌道(x,y,z) と時計
オフライン Rapid/Finalは PPP-ARに必須
clock RINEX v2/v3 High rateクロック オフライン PPP-ARに必須
RTCM v2.3 GPS リアルタイム
RTCM v3.1 GPS/GLONASS/Galileo リアルタイム
RTCM v3.1 SSR GPS/GLONASS/Galileo の上記補正値
リアルタイム 新規
リアルタイム PPP-ARに必須
BINEX 0x01 0x01-01 GPS
0x01-02 GLONASS 0x01-03 SBAS 0x01-04 Galileo 0x01-05 QZSS
リアルタイム 新規
※GPS/Galileo/QZSSの暦はIS-GPS200D互換、GLONASS/SBASはPos/Vel/Acc
3.1.4. 各種補助情報
本システムにおいて測位解析を行う際、補助情報として指定できる外部情報として以 下をサポートすることとする。
表 3.1-6 サポートする補助情報
フォーマット
/バージョン
格納内容 処理形態 備考
RINEX v2.x, v3.x 基準局位置 受信機識別 アンテナ識別
オフライン
RTCM v2.3 基準局位置 type 3/22 リアルタイム
RTCM v3.1 基準局位置 type 1005/1006
アンテナ識別 type 1007/1008
リアルタイム
ANTEX 1.3/1.4 マルチGNSS衛星の絶対PCV
受信機絶対PCV
オフライン/
リアルタイム
1.4は新規
NGS PCV 受信機相対PCV オフライン/
リアルタイム
CODE DCB DCB オフライン/
リアルタイム (*1)
IONEX TECマップ オフライン/
リアルタイム
GSIGEO2000 日本のジオイド高データ オフライン/
リアルタイム
公共測量で利 用
地殻変動補正 パラメータ
セミ・ダイナミック補正に用い るデータ
オフライン/
リアルタイム
新規(*2) 公共測量で利 用
地球回転パラメー タ
地球固定座標系と慣性座標系間 の変換のためのパラメータ
オフライン/
リアルタイム
(*1) 2012年3月現在、公開されているDCBはP1C1, P1P2, P2C2の3種類のみ。
L5C はどのような組合せで公開されるか未定のため、第1版では DCB 推定で対 応する。L5C関係のDCBファイルへは第2版で対応する。
(*2) 実装が明らかになる詳細設計でGSIソフトウェア(SemiDynaEXE)を使用する か検討する。
3-7 3.2. 出力データ
本システムから外部システムへ出力するデータはない。
3.3. 通信インタフェース
(1) サポートする通信インタフェース
本システムにおいてサポートする通信インタフェース(データを入出力するポート)
を以下に記す。
表 3.3-1サポートする通信インタフェース
通信インタフェース 説明
RS-232C 米国電子工業会(EIA)によって標準化されたシリアル通
信規格の一つ。D-Sub 9ピンコネクタを使用する。
USB RS-232C の置き換えを狙って開発されたシリアル通信
規格であり、多くの企業が仕様策定に参加した。
LANポート インターネットに接続するためのポート。
HDD ハードディスク又はSSD
(2) サポートする入出力ストリーム
本システムでは、あらゆる I/O をストリームという概念で取り扱う。本システムで取 り扱うことのできるストリームタイプを以下に記す。
表 3.3-2 サポートするストリームタイプ
ストリームタイプ 説明 I/O
Serial シリアルポート(RS232C又はUSB)を利用する。 I/O
TCP Client TCP Serverに接続してデータを入出力する。 I/O
TCP Server TCP Clientからの接続によりデータを入出力する。 I/O
NTRIP Client NTRIP casterに接続してデータを入力する。
RTCM, BINEXの伝送に利用する。
I
File HDD 上のファイルからデータを入出力する。リアル タイム再現機能において、保存した RTCM/BINEX を 再生するときにも使用する。
I/O
FTP,HTTP FTPまたはHTTPによるファイルのダウンロード I
4-1 4. 内部インタフェース
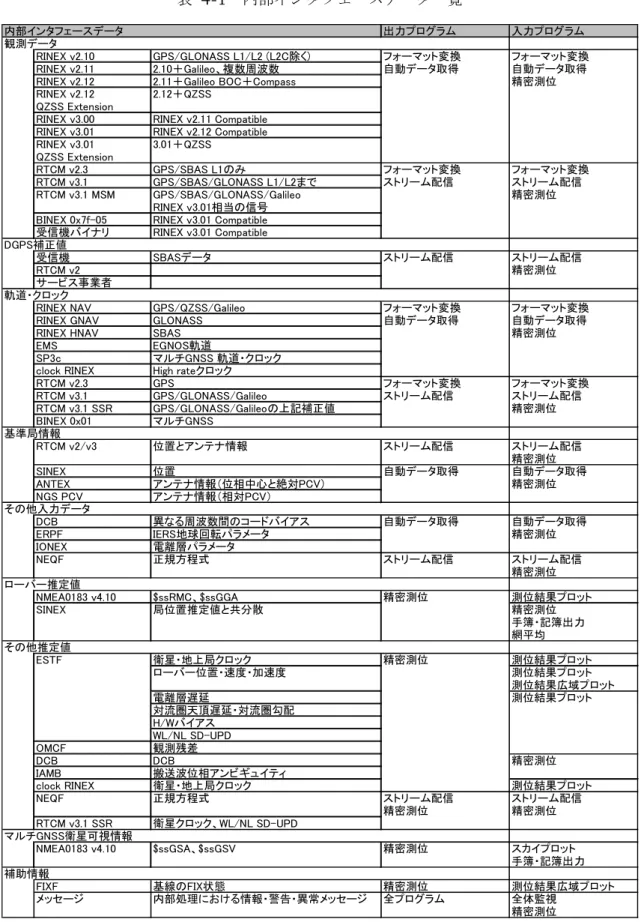
内部インタフェースとは、本システムを構成するプログラム間のインタフェース、及 び外部システムへ公開することのない出力データを指す。本システムの内部インタフェ ースデータ一覧を表 4-1 に示す。表の中で、一部のファイル(DCB 等)が二箇所に出 現しているが、これらはフォーマットが同じでも中身の種類が異なるためである。
表 4-1 内部インタフェースデータ一覧
内部インタフェースデータ 出力プログラム 入力プログラム
観測データ
RINEX v2.10 GPS/GLONASS L1/L2 (L2C除く) フォーマット変換 フォーマット変換 RINEX v2.11 2.10+Galileo、複数周波数 自動データ取得 自動データ取得
RINEX v2.12 2.11+Galileo BOC+Compass 精密測位
RINEX v2.12 QZSS Extension
2.12+QZSS
RINEX v3.00 RINEX v2.11 Compatible RINEX v3.01 RINEX v2.12 Compatible RINEX v3.01
QZSS Extension
3.01+QZSS
RTCM v2.3 GPS/SBAS L1のみ フォーマット変換 フォーマット変換
RTCM v3.1 GPS/SBAS/GLONASS L1/L2まで ストリーム配信 ストリーム配信 RTCM v3.1 MSM GPS/SBAS/GLONASS/Galileo
RINEX v3.01相当の信号
精密測位 BINEX 0x7f-05 RINEX v3.01 Compatible
受信機バイナリ RINEX v3.01 Compatible DGPS補正値
受信機 SBASデータ ストリーム配信 ストリーム配信
RTCM v2 精密測位
サービス事業者 軌道・クロック
RINEX NAV GPS/QZSS/Galileo フォーマット変換 フォーマット変換
RINEX GNAV GLONASS 自動データ取得 自動データ取得
RINEX HNAV SBAS 精密測位
EMS EGNOS軌道
SP3c マルチGNSS 軌道・クロック clock RINEX High rateクロック
RTCM v2.3 GPS フォーマット変換 フォーマット変換
RTCM v3.1 GPS/GLONASS/Galileo ストリーム配信 ストリーム配信 RTCM v3.1 SSR GPS/GLONASS/Galileoの上記補正値 精密測位 BINEX 0x01 マルチGNSS
基準局情報
RTCM v2/v3 位置とアンテナ情報 ストリーム配信 ストリーム配信
精密測位
SINEX 位置 自動データ取得 自動データ取得
ANTEX アンテナ情報(位相中心と絶対PCV) 精密測位
NGS PCV アンテナ情報(相対PCV)
その他入力データ
DCB 異なる周波数間のコードバイアス 自動データ取得 自動データ取得
ERPF IERS地球回転パラメータ 精密測位
IONEX 電離層パラメータ
NEQF 正規方程式 ストリーム配信 ストリーム配信
精密測位 ローバー推定値
NMEA0183 v4.10 $ssRMC、$ssGGA 精密測位 測位結果プロット
SINEX 局位置推定値と共分散 精密測位
手簿・記簿出力 網平均 その他推定値
ESTF 衛星・地上局クロック 精密測位 測位結果プロット
ローバー位置・速度・加速度 測位結果プロット
測位結果広域プロット
電離層遅延 測位結果プロット
対流圏天頂遅延・対流圏勾配 H/Wバイアス
WL/NL SD-UPD
OMCF 観測残差
DCB DCB 精密測位
IAMB 搬送波位相アンビギュイティ
clock RINEX 衛星・地上局クロック 測位結果プロット
NEQF 正規方程式 ストリーム配信
精密測位
ストリーム配信 精密測位 RTCM v3.1 SSR 衛星クロック、WL/NL SD-UPD
マルチGNSS衛星可視情報
NMEA0183 v4.10 $ssGSA、$ssGSV 精密測位 スカイプロット
手簿・記簿出力 補助情報
FIXF 基線のFIX状態 精密測位 測位結果広域プロット
メッセージ 内部処理における情報・警告・異常メッセージ 全プログラム 全体監視
精密測位
5-1 5. システム方式
次ページ以降に各種方式設計結果を記す。
5.1. 自動データ取得方式(スケジューラ)
本システムでは、高精度測位に必要な観測データ、軌道時刻情報、測位補助情報を国 際GNSSサービスのサイト(CDDIS等)から取得し、指定したディレクトリに保存でき る機能を有する。
取得処理はスケジューラにより定期的に自動起動される。スケジュールはスケジュー ル定義ファイルに記載し、エディタで編集が可能なASCIIテキスト形式とする。また、
このファイルを編集するGUIも有する。
自動取得の対象ファイルは、3章の外部インタフェースの表で、処理形態がオフライン のものとする。また、取得ファイルは処理条件ファイルに以下の項目を記載することで 指定する。本プログラムは内部でGNU wgetを使用するので、wgetrcファイルを編集す ることで、さらに細かな設定が可能となる。
項目 詳細
URL ftp://cddis.gsfc.nasa.gov/gps/data/daily/%YY/%DY/*.%2Yo.Z のように指定。%YY等はマクロであり以下を指定できる。
%YY : 4-digit year
%2Y : 2-digit year
%MM : Month
%DD : day
%DY : day of year
%WW : GPS week
%WD : GPS week day wgetコマンド引数 GNU wgetのマニュアル参照
蓄積するディレクトリは、トップディレクトリを環境変数ATDATAで指定し、以下の ように格納する。取得ファイルのタイムスタンプは、自動取得データの更新確認のため に外部サイトのタイムスタンプを保持する。
データ種 ディレクトリ 構造
観測データ $ATDATA/data 国際GNSSサービスのサイトの構造に従う。
軌道時刻情報 $ATDATA/products 同上
注)3 章で測位補助情報に分類されている IONEXもこのフォルダに格納する
測位補助情報 $ATDATA/others 下記参照
5.1-2 測位補助情報のディレクトリ構造
/others
/antex ANTEX を格納 /pcv NGS PCV を格納
/dcb CODE DCB を格納(CODE DCB は日毎に更新されるが、
ファイル名に日付がないため、取得時に付与する)
/gsi GSIGEO2000 ジオイドデータ、地殻変動補正データを格納
5.2. 自動取得データの更新確認(測位解析時)
本システムでは、オプションで、精密測位プログラム起動時に、解析セッションで使 用するデータより、取得先データのタイムスタンプが新しい場合は、そのデータを再取 得して解析に使用する機能を有する。この機能は、$ATDATAディレクトリにファイルが 存在しない場合も有効なため、自動取得をスケジューリングしていない環境でも、解析 期間を指定すると、自動的にファイルを取得して解析することができる。取得したデー タは自動的に$ATDATA以下に格納される。
5.3-1 5.3. 各測位モードの処理方式
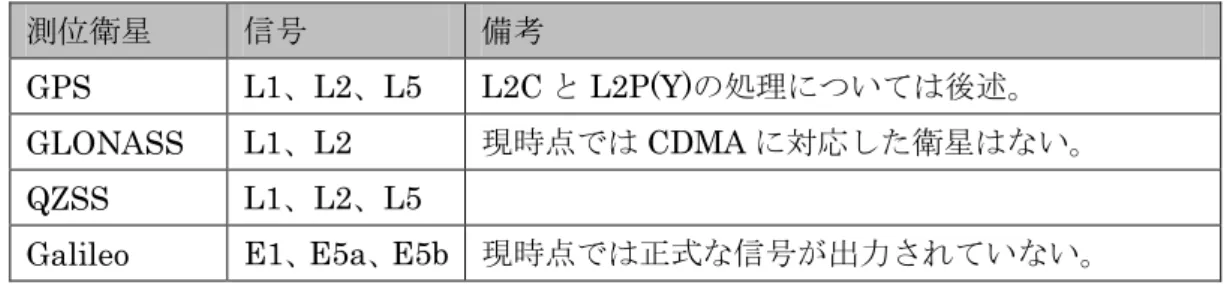
本システムが採用する測位モードとして、表 5.3-1 の内容を検討した。検討の結果、
本システムで採用することにした測位モードを「採用」カラムで識別した。なお、使用 する信号の種類や処理ロジックは測位モード毎に小節を設けて以降で説明する。
表 5.3-1 測位モード一覧
№ 測位モード 採用
1 単独測位 ○
2 DGPS ○
3 スタティック ○
4 キネマティック ○
5 複数基線解析 ○
6 PPP(精密単独測位) ○
7 PPP-AR ○
8 GEONETモード ○
5.3.1. 単独測位
単独測位では、ローバー受信機1台で、コード擬似距離を用いて位置の推定を行う。通 常1台の受信機で、4個以上の衛星を観測する必要がある。GLONASSを含む統合測位の場
合、GLONASSの観測モデルにGPS-GLONASS間の時刻差を未知数として加える必要があ
るため、5つ以上の衛星を観測する必要がある。図5.3.1-1に単独測位の概念図を示す。
図5.3.1-1 単独測位の概念図
次に、本モードの現場(リアルタイム)でのデータフローを図5.3.1-2に示す。ローバー 受信機の観測データをバイナリ形式でシリアルポートからPCに入力し、単独測位演算を行 う。
Rover Receiver
精密測位 プログラム PC
Serial
図5.3.1-2 単独測位(現場)のデータフロー
また、現場でのデータ収集後、オフラインで単独測位解析を行う場合、本システムでは2 種類の方法がある。1 つ目は、データ受信模擬機能を利用して、PC に保存した受信機バイ ナリデータを再生して単独測位を行う方法であり、もう1つは上記データをRINEXへ変換 してから後処理で単独測位を行う方法である。それぞれのデータフローを図5.3.1-3および 図5.3.1-4に示す。
5.3.1-2
図5.3.1-3 単独測位(受信機模擬)のデータフロー
図5.3.1-4 単独測位(RINEX後処理)のデータフロー
測位解析方式自体は、リアルタイム解析でも後処理解析でも同じであるため、以降では 後処理解析を例として、単独測位の処理ステップを説明する。
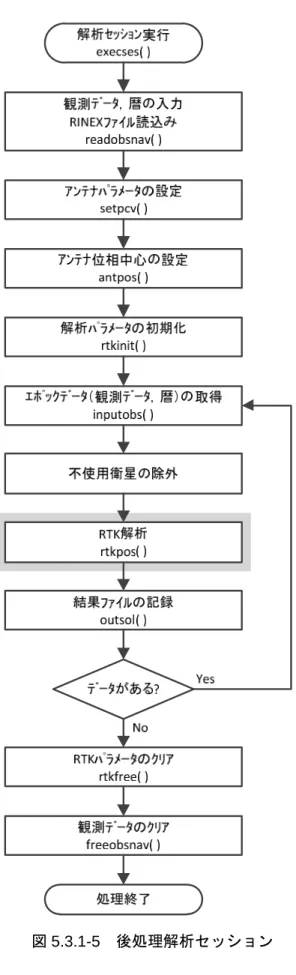
RTKLIBの後処理解析セッションexecses( )の処理フローを図5.3.1-5に示す。後処理解析 では、最初に関数 readobsnav( )にて、RINEX ファイルから観測データや暦等を全てメモリ 上に読み込む。その後、エポック毎の観測データを抽出し、測位計算に渡す。
単独測位モードの前処理と測位解析は関数rtkpos( )以下で行われるため、この処理フロー を図5.3.1-6に示す。
図5.3.1-5 後処理解析セッション
5.3.1-4
図5.3.1-6 単独測位モードのRTK解析処理
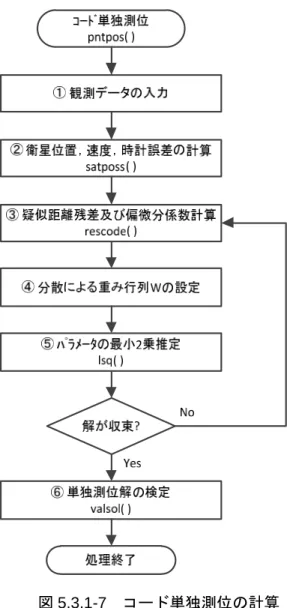
実際の単独測位計算は関数 pntpos( )の中で行われる。関数 pntpos( )の処理フローを図 5.3.1-7に示す。
なお、関数outsolstat( )では、下記項目をファイルに保存する。
a) 受信機位置
b) 受信機速度、加速度 c) 電離層パラメータ d) 対流圏パラメータ
e) 受信機ハードウェアバイアス f) 残差とステータス
図5.3.1-7 コード単独測位の計算
以下に、図5.3.1-7の各処理の概要を示す。詳細は、6.アルゴリズム仕様を参照されたい。
① 観測データの入力
エポック毎の観測データを入力する。
② 衛星位置、速度、時計誤差の計算
放送暦から衛星の位置、速度及び時計のバイアスを計算する。
③ 疑似距離残差及び偏微分係数の計算
GNSSの疑似距離の観測方程式は次のように表せる。
ܲ=ߩ+ܿ൫∆ݐ− ∆Tୱ+ ∆ܤ,൯+ܫ+ܶ+ߝ
ܲは観測衛星系の疑似距離観測値、ߩは受信機-衛星間の幾何学距離、cは光速、∆ݐは
5.3.1-6
GPS時刻に対する受信機時計誤差、∆Tୱは観測衛星系の衛星時計バイアスである。∆ܤ,
は疑似距離バイアスであり、GPSの場合、∆ܤ,= 0である。Iは電離層遅延、Tは対 流圏遅延、ߝはコードのマルチパス誤差及び受信機雑音を表す。
残差計算では、まず擬似距離観測値に対して、コードバイアス補正を行う。そして、
受信機と衛星間の幾何学距離、衛星の視線方向単位ベクトルを計算する。受信機の初 期位置を(0,0,0)とし、エポックごとの測位結果より逐次に更新する。対流圏遅延は
Saastamoinen モデルから補正する。擬似距離の理論値を求めた後に、残差を計算し、
観測量ベクトルy、計画行列Hを設定する。
④ 重み行列Wの設定
観測量間に相関がないと仮定しているので、重み行列 W の対角要素のみを設定す る。ここで、a୧は重み係数、σ୧は疑似距離誤差の標準偏差である。
) ) a ( ,..., ) a ( , ) a ( , ) a ((
diag
W 11 2 22 2 33 2 mm 2
➄ パラメータの最小2乗推定
最小2乗法により次式のdxを求め、推定値xොを更新する。ここで、xは推定値の初 期値、yは観測残差行列、Hは計画行列、Qは分散共分散行列である。
xො= x+ dx
= x+ (HH)ିଵHy
= x+ QିଵHy
⑥ 単独測位解の検定
カイ2乗検定とGDOPのチェックにより、測位解析結果の妥当性を検定する。
5.3.2. DGPS
DGPSでは、ローバー受信機と基準点受信機(もしくは基準点に相当する補正データ)に より、コード擬似距離観測量を用いてローバー受信機の位置を推定する。通常ローバーと 基準点の両方の受信機で、4個以上の衛星を観測する必要がある。図5.3.2-1にDGPSの概 念図を示す。
図5.3.2-1 DGPSの概念図
次に、本モードの現場でのデータフローを図5.3.2-2に示す。基準点の受信機バイナリデ ータは無線機などを経由してPCに入力し、ローバーの受信機バイナリデータは直接シリア ルポートからPCに入力して、DGPS演算を行う。
ReceiverBase Rover
Receiver
精密測位 プログラム 無線機
無線機
PC Serial
Serial Serial
図5.3.2-2 DGPS(現場)のデータフロー
また、オフラインでDGPS解析を行う場合、本システムでは2種類の方法がある。1つ目 は、データ受信模擬機能を利用して、PCに保存した受信機バイナリデータを再生してDGPS を行う方法であり、もう1つは上記データをRINEXへ変換してから後処理でDGPSを行う 方法である。それぞれのデータフローを図5.3.2-3および図5.3.2-4に示す。
5.3.2-2
図5.3.2-3 DGPS(受信機模擬)のデータフロー
図5.3.2-4 DGPS(RINEX後処理)のデータフロー
測位解析方式自体は、リアルタイム解析でも後処理解析でも同じであるため、以降では 後処理解析を例として、DGPSの処理ステップを説明する。
RTKLIBでは、DGPSも後処理解析セッションexecses( )以下で行われるため、この部分の 処理フローは図5.3.1-5と共通となる。DGPSモードの前処理と測位解析はrtkpos( )以下で 行われ、この処理フローを図5.3.2-5に示す。なお、スタティック、キネマティックといっ た相対測位の場合の処理も、図5.3.2-5と共通となる。
移動局,基準局の観測衛星数カウント RTK解析
rtkpos( )
基準局座標のセット
単独測位による移動局座標の推定 pntpos( )
観測データの時刻チェック
相対測位 relpos( )
状態の保存 outsolstat( )
処理終了
図5.3.2-5 DGPSのRTK解析処理
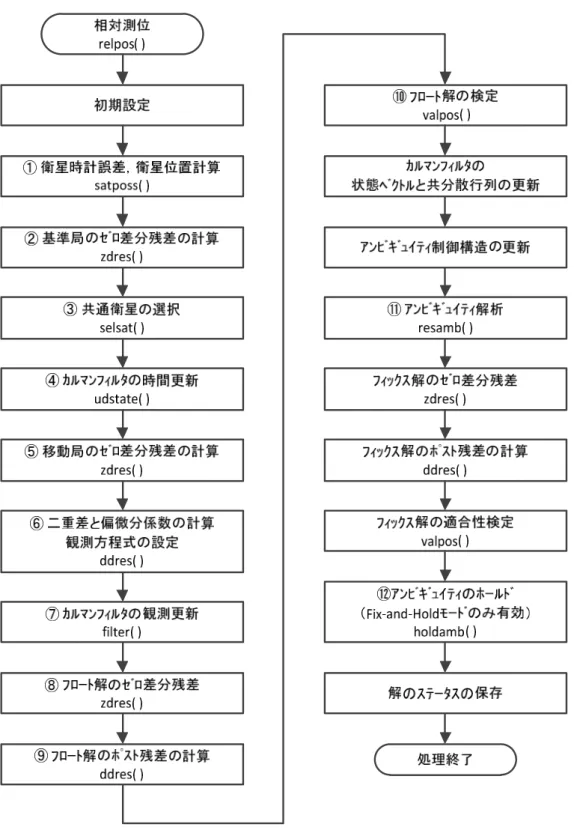
RTKLIBにおいて、実際のDGPSの計算は関数relpos( )以下で行われる。関数relpos( )の 処理フローを図5.3.2-6に示す。
5.3.2-4
処理終了 初期設定
カルマンフィルタの 状態ベクトルと共分散行列の更新
解のステータスの保存 相対測位
relpos( )
衛星時計誤差,衛星位置計算 satposs( )
基準局のゼロ差分残差の計算 zdres( )
共通衛星の選択 selsat( )
カルマンフィルタの時間更新 udstate( )
移動局のゼロ差分残差の計算 zdres( )
二重差と偏微分係数の計算 観測方程式の設定
ddres( )
カルマンフィルタの観測更新 filter( )
フロート解のゼロ差分残差 zdres( )
フロート解のポスト残差の計算 ddres( )
フロート解の検定 valpos( )
図5.3.2-6 DGPSの計算
図5.3.2-6の計算フローは、キネマティック処理のフロート解の場合と同じであり、キネ
マティック処理と異なるのは、
・コード疑似距離のみで測位を行う
・搬送波位相アンビギュイティをカルマンフィルタで推定しない
という点のみである。従って、図5.3.2-6の各処理の概要は、キネマティックの節を参照さ れたい。
5.3.3. スタティック
RTKLIBのスタティックでは、ローバー受信機と基準点受信機(もしくは基準点に相当す
る補正データ)にて観測された、コード擬似距離と搬送波位相を用いて、基準点からの相 対位置としてローバー受信機の位置をエポック毎に推定する。この時、ローバーの座標を 前エポックの座標に拘束するという条件を加えて測位演算が行われる。通常ローバーと基 準点の両方の受信機で、4個以上の衛星を観測する必要がある。GLONASSを含む統合測位
の場合、GLONASSの観測モデルにGPS-GLONASS間の時刻差を未知数として加える必要
があるので、5つ以上の衛星を観測する必要がある。図5.3.3-1にRTKLIBのスタティック 測位の概念図を示す。
図5.3.3-1 RTKLIBのスタティック測位の概念図
本モードで測位解析を行う際のデータフローは、DGPSの場合と同様である。つまり、現 場でのデータフローは図5.3.2-2、オフラインで解析を行う場合のデータフローは、図5.3.2-3 もしくは図5.3.2-4となる。
後処理解析の場合、スタティックの前処理も関数execses( )およびrtkpos( )以下で行われる ため、これらの処理フローもDGPS( 図5.3.1-5および図5.3.2-5)と共通となる。
実際のRTKLIBのスタティック解析は関数relpos( )以下で行われるが、キネマティック解 析の処理ステップと全く同じであり、カルマンフィルタの時間更新則での初期値設定が異 なるのみである。従って、処理概要はキネマティックの節を参照されたい。
5.3.4-1 5.3.4. キネマティック
GNSS衛星からの搬送波を用いた高精度の相対測位法の中で、移動する物体の位置を瞬時
に2~3cmの精度で決定する手法がキネマティック(移動体測位)である。移動体の位置を
リアルタイムに決定する場合は、リアルタイムキネマティックと呼ばれている。マルチ GNSS受信機を搭載した独自の基準局もしくは電子基準点(座標は既知)で補正情報を生成 し、それを移動局座標の推定に用いることで、基準局と移動局の共通の誤差を消去でき、
高精度測位が実現される。図5.3.4-1にキネマティック測位の概念図を示す。
図5.3.4-1 キネマティック測位の概念図
本モードで測位解析を行う際のデータフローは、DGPSの場合と同様である。つまり、現 場でのデータフローは図5.3.2-2、オフラインで解析を行う場合のデータフローは、図5.3.2-3 もしくは図5.3.2-4となる。
後処理解析の場合、キネマティックの前処理も関数execses( )およびrtkpos( )以下で行われ るため、これらの処理フローはDGPS (図5.3.1-5および図5.3.2-5)と共通となる。
RTKLIBにおいて、実際のキネマティック解析は、関数relpos( )以下で行われる。キネマ
ティック解析の処理フローを図5.3.4-2に示す。
図5.3.4-2 キネマティックの計算
5.3.4-3
以下に、図5.3.4-2の各処理の概要を示す。詳細は、6.アルゴリズム仕様を参照されたい。
① 衛星時計誤差、衛星位置計算
衛星の位置と時計誤差を、下記の4方式から選択して計算する。放送暦と精密暦が使 用できる。また、SBASやRTCM-SSRといった形式での広域の衛星軌道・時計誤差の補 正情報も利用可能となっている。
a) 放送歴 b) 精密歴
c) 放送歴+SBAS補正
d) 放送暦+RTCM_SSR補正(SSR: State Space Representation)
② 基準局のゼロ差分残差の計算
まず、衛星と測位した位置の幾何学距離を求め、衛星時計誤差、対流圏遅延およびア ンテナ位相中心の補正を行う。その後、補正後の幾何学距離と、受信機で計測された搬 送波位相距離データおよび疑似距離データを用いて、観測残差行列を計算する。
すなわち、測位した位置の座標を(x୰, y୰, z୰)、衛星の座標を(xୱ, yୱ, zୱ)とすれば、光速c、 地球の自転速度ωୣを用いて、幾何学距離ρは次式となる。ここで、右辺第2項は地球自転 によるサニャック効果を表している。
ρ=ඥ(xୱ−x୰)ଶ+ (yୱ−y୰)ଶ+ (zୱ−z୰)ଶ+ωୡ(xୱy୰−yୱx୰)
また、疑似距離をP[m]、搬送波位相をL[サイクル]、衛星時計誤差をδtୱ、対流圏遅延を T、アンテナ位相オフセット補正量をa୰とし、搬送波位相の波長λと、光速cを用いれば、
疑似距離と搬送波位相の観測残差行列は次式から求まる。
dy= P−(ρ−cδtୱ+ T + a୰) dy=λL−(ρ−cδtୱ+ T + a୰)
なお、②は設定された基準局座標に対する計算であり、設定座標に異常がないか確認 するための処理となる。
③ 共通衛星の設定
移動局と基準局の共通衛星のうち、設定された仰角マスク以上の衛星を選択する。前 記の条件を満たす共通衛星がなければ、以降の処理は行わない。
④ カルマンフィルタの時間更新
通常のキネマティックでは、移動局の位置と搬送波位相バイアスがカルマンフィルタ の推定パラメータとなる。長基線RTKモードの場合、電離層と対流圏の影響もカルマン フィルタで推定する。GLONASS を含む統合測位の場合、受信機ハードウェアバイアス も推定パラメータに加わる。
なお、RTKLIBのスタティックとキネマティックで、処理が異なるのは、udstate( )以下
の関数udpos( )のみである。RTKLIBのスタティックでは、移動局の座標が前エポックの
フロート解に拘束されるという条件が付加された時間更新則となっている。
➄ 移動局のゼロ差分残差の計算
移動局の単独測位解に異常がないか確認するための処理。
⑥ 二重差と偏微分係数の計算および観測方程式の設定
観測残差行列に対して二重差行列V୩を計算する。また、幾何学距離を移動局位置で偏 微分し、計画行列H୩を計算する。V୩とH୩には、電離層遅延、対流圏遅延、受信機ハード ウェアバイアスも考慮する。
⑦ カルマンフィルタの観測更新
観測時刻t୩における未知パラメータ推定値をxො୩、推定値共分散行列をP୩とし、観測更 新前後の値をそれぞれ(-)、(+)をつけて表す。二重差をとった観測残差行列をv୩、計画行 列をH୩、観測誤差共分散行列をR୩とすると、観測更新則は以下で与えられる。
K୩= P୩(−)H୩൫H୩P୩(−)H୩+ R୩൯ିଵ xො୩(+) = xො୩(−) + K୩v୩
P୩(+) = (I−K୩H୩)P୩(−)
⑧ フロート解のゼロ差分残差
移動局のフロート解に異常がないか確認するための処理。
⑨ フロート解のポスト残差の計算
フロート解の適合性検定のためのポスト残差を計算する。
⑩ フロート解の適合性検定
フロート解のポスト残差で検定を行う。
⑪ アンビギュイティ解析
LAMBDA/MLAMBDA法により、搬送波位相のアンビギュイティを解析し、フィック
ス解を求める。
⑫ アンビギュイティホールド
一旦搬送波位相アンビギュイティが決定されれば、以後のエポックではそれを保持し てカルマンフィルタの観測更新を行う。Fix-and-Holdモードの場合のみ有効となる。
5.3.5-1 5.3.5. 複数基線解析
ここでいう、複数基線解析は、公共測量におけるスタティック測位で利用されること を想定している。スタティック測位において、冗長な観測量が得られた場合、網平均計 算を行う必要があるが、ここでは、本システムにおける、網平均の考え方を説明する。
まず、複数の基地局を利用して網平均計算を行う場合の局配置例を図 5.3.5-1 に示す。
基地局 A~D は、電子基準点等の固定点であり、これら基地局に囲まれたローバーの位 置を測量する。
網平均の考え方では、まずはじめに基線 A~D のそれぞれを基線解析してローバーの 位置と共分散を求め、これら4つのデータを共分散に応じて重み付け平均する。
しかし、本システムの精密測位プログラムでは、各基線の正規方程式(NEQ)を全て まとめて、行列式を解き、ローバーの位置と共分散を 1 ステップで計算する。アルゴリ ズムの詳細は、6章のアルゴリズム仕様書に記載する。
基地局A
基地局D 基線A
基線D
ローバー
基線C 基線B
基地局B 基地局C
図 5.3.5-1 複数基地局利用例
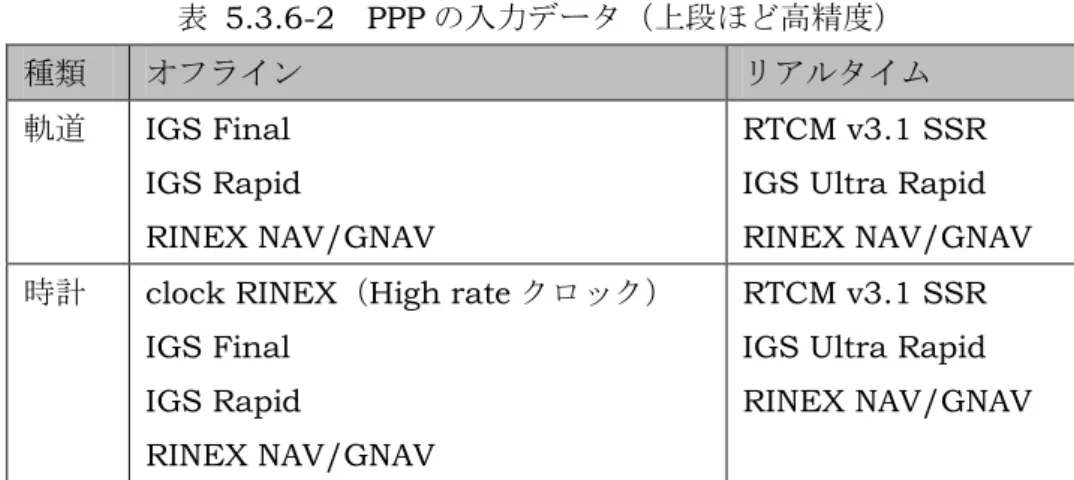
5.3.6. PPP(精密単独測位)
PPP では、衛星の精密な軌道と時計(クロックオフセット)が必要になる。オフライ ンとリアルタイムでは、そのアプローチが異なるため、分けて記述する。
5.3.6.1. オフライン処理
以下に、国際GNSSサービスのホームページで公表されている精密暦の種類と精度を 記す。2012年3月現在、精密な軌道と時計が得られる衛星システムはGPSしかない。
本システムは、衛星時計推定機能を有しているため、PPP を実行する前に、グローバル ネットワークで GLONASS の時計を推定しておけば、GLONASS も軌道と時計を得る ことができる。精密軌道暦・時計の存在しない GalileoとQZSS は、航法メッセージを 使用することになるが、精密測位とは言えない精度しか出ない。
表 5.3.6-1 精密暦の精度
衛星システム 暦の種類 精度 本システムでの対応
GPS Final 軌道:2.5 cm
時計:75 ps RMS 20 ps STD
対応する。
衛星クロックにclock
RINEXも利用できる。
Rapid 軌道:2.5 cm
時計:75 ps RMS 25 ps STD
対応する。
衛星クロックにclock
RINEXも利用できる。
GLONASS Final 軌道:5 cm
時計:(情報なし)
事前にグローバルネットワ
ークで GLONASS の時計を
精密に推定して使用する。
Galileo Navigation 情報なし 精密軌道と時計が公表され
るまでは、Navigation を使 用するが、精度は出ない。
QZSS Navigation 情報なし 精密軌道と時計が公表され
るまでは、Navigation を使 用するが、精度は出ない。
本システムのPPPオフライン処理は、軌道に精密暦、又は航法メッセージ、時計に精 密暦・clock RINEX・航法メッセージを入力できる仕様とする。
また、High rateのPPPを行うためには、15分間隔のIGS精密暦を補間する必要が ある。さらに、衛星-観測局の幾何距離を求める際に高精度な衛星速度が必要になるが、
5.3.6-2
地球固定座標のまま補間したのでは目的の精度が得られない。そこで、本システムでは 軌道を慣性座標系へ変換して、地球重力場等を考慮して、位置と速度を補間し、地球固 定座標系に戻す。このために、IERSよりIAU2000地球回転パラメータを入手すること になる。