Grover アルゴリズムを用いた波力集中システム模擬実験装置における 設計パラメータの検討
(机上の水槽に浮かぶ多体フロートを用いた場合)
芹澤 洋介
*1,小竹 茂夫
*1Parameter Design of Experimental Simulator for Wave Power Concentration System under
Grover Algorithm
(In Case of Multiple Floats Model with Water Tank on Desk) Yosuke SERIZAWA
*1and Shigeo KOTAKE
*1*1 Department of Mechanical Engineering, Mie University 1577 Kurimamachiya-cho, Tsu City, Mie Prefecture, 514-8507, Japan
Abstract
We design parameters of multiple mass-spring system, such as masses and spring constants, under Grover algorithm in an experimental simulator to concentrate wave power. Since waves were vertically oscillated at offshore, multiple floats with springs as small oscillators are intended to be used for wave power accumulators. These oscillatory energies of the floats were concentrated into a special small oscillator through a plate with spring as a large oscillator in Grover algorithm. Accumulated wave power in the special oscillator is transferred into electricity though connected power generator as damper in the multiple oscillators. To achieve this mechanism, natural frequency of the small special oscillator is designed to be close to either of the two eigen-frequencies of the multiple oscillators. Parameters of the system were designed for the experimental simulator with water tanks on desk for demonstration by using numerical simulations.
Key words : Wave power generator, Numerical simulation, Grover algorithm, Vertical oscillation, Power accumulation
1. 緒 言
自然エネルギーの利用において,一つの解決すべき大きな問題はそのエネルギー密度の薄さである.地球には 膨大な太陽エネルギーが降り注いでいるものの,単位面積当たりの量は少なく,そのため火力発電や原子力発電 等の大規模集中発電法と比べてコストの点で大きく引けを取るのが現状である.風力発電の大型化はその一つの 解であるものの,これ以上の大規模化は限界に近く,新たなアイディアが待ち望まれている.
海の波のエネルギーを利用した波力発電法は,波自体のエネルギーが水といった密度の高い媒体を通して得ら れることから効率が良く,1 m幅当たり10 kW~90 kWのエネルギーが得られることが知られている (渡部, 2009). 一方で,波のエネルギーは波浪の状況によって大きく変化することから,波力発電の設計には嵐の際にも壊れな い頑丈さを保障する必要がある (渡部, 1984).そのため波力発電一基当たりの大型化は難しく,風力のような大 規模化は進んでこなかった.
他方,波力は海上では上下方向に,また海岸線では水平方向に往復する運動であることから,振り子等の振動 子を用いてエネルギーを取り出す工夫が試みられてきた(渡部, 1984, Imai, et al., 2013).ところが前述のような理由 から,波力を受ける羽根を極端に大きくすることはできず,一つの発電機当たりのエネルギー密度を上げること はできないでいた.また大型な発電機を作ったとしても,そのコストは他の発電法に比べ割高なものとなってい た.さらに波は振動の周期が不規則であることから,一定の周期で運動する振り子を用いた場合,必ずしも波力 から効率的にエネルギーを取り出すことはできないでいた.
原稿受付 2016年08月10日
*1 三重大学工学部(〒514-8507 三重県津市栗真町屋町1577) E-mail of corresponding author: [email protected]
これまで筆者らは,量子情報理論における量子アルゴリズムを古典的な波動現象に応用する試みを続けてきた
(高田他,2011).例えば多数の振動子からなる多体振動系はその一つであり,多数の振動子間に生じる非線形現
象の中には波動の作るアルゴリズムとして理解できるものがあることを明らかにしてきた.例えばGroverアルゴ
リズム (Grover, 1997, Patel, 2006)は,量子情報理論においては専ら情報検索アルゴリズムとして用いられてきたが,
多体衝突振動系に応用した場合,振動子間のエネルギー移動を実現する(高田他,2011).これを波力発電に応用 した場合,装置を適切に設計することで,波によって加振される多数の振動子の振動エネルギーを一か所に集中 することができる可能性がある (内田他, 2010, Kotake, et al., 2009).また波を受ける振動子とは別の振動子にエネ ルギーを移動させることができることから,発電をより簡便に行える可能性がある.
これまでGroverアルゴリズムを用いた波力発電法は,概念上や数値計算上では検討されてきたが,実際の装置
としてその機能を確かめる実験は,あまり試みられてこなかった.そこで前回筆者らは,佐賀大学海洋エネルギ ー研究センター内にある二次元造波水路を用い,Groverアルゴリズムが成り立つように設計された多体振り子を 用いることで,波力を受ける振動子とは別な特殊振動子にエネルギーを移動させる実験を行った (小竹, 2014). その結果,波力を受ける加振振り子から,自由に振動する受信振動子へ,振動エネルギーが流れることを実験に よって確かめ,波の周期の倍の固有周期を持つ受信振り子を設計することで,より効率的にエネルギー流れが生 じる様子を確認した.
ところが,二次元造波水路等の人工造波装置によって作られる波の多くは,沖合の波を模したものであり,発 生する水の運動は上下運動が主となり,水平にはあまり変位しない.そのため,前回行った多体振り子を用いた 実験では,あまり大きな変位を得ることができなかった.そのため,二次元造波水路等の人工造波装置を使って
Groverアルゴリズムを用いた波力発電法の実験を行う場合,上下運動を主とする波によって加振された多数の振
動子の振動エネルギーを一か所に集中できる装置を設計し,本手法の検証する必要がある.
そこで今回は,より簡便な水槽等を用いた模擬実験におけるエネルギー集中装置の設計パラメータについて考 察する.水槽内部をスロッシングにより主として上下運動する波から効率的にエネルギーが得られるように,質 量-ばねモデルを用いることとし,Groverアルゴリズムが成り立つように設計された多体質量-ばねモデルの質 量やばね定数等の設計法について検討した.さらに特殊振動子に接続された発電機による減衰の効果やフロート 長さの影響について議論を行った.
2. 解析モデルおよび運動方程式
図1に本研究で用いる多体振動モデルを示す.質量M,ばね定数Kの大振動子にn個の小振動子が結合されて いる.このうちn-1個の小振動子は質量m,ばね定数kとし,フロートを通して外力を受ける.残りの一つの小 振動子は,固有振動数が他とは異なる特殊小振動子とし,質量m1,ばね定数k1,発電機によりc1の減衰を受ける ものとする.ここで,大振動子の釣り合い位置からの変位をX,n-1個の小振動子の重心のつり合い位置からの変 位をx2,特殊小振動子のつり合い位置からの変位をx1とする.また各振動子の速度をV,v2,v1とする.さらに 波によるフロートへの外力の合力をF(t)とした.これにより,図1の多自由度振動系の運動方程式は
) ( ) (
0 )
(
0 ) (
) (
2 2
1 1 1
1 1 1
2 1
t F X x k x m
x c X x k x m
x X nk x X K X M
(1) となる.ここで,抗力係数,仮想質量係数をゼロとすると(種浦他, 2010),F(t)は小振動子が受ける浮力のみとし て取り扱うことができる.いま,普段の波の運動を考えた場合,十分に近い距離においては空間的に強い相関性 を有するものと考えられる(内田他, 2010).そのため,各小振動子には一様な波の変位f(t) が与えられるとする とF(t)は
) ) ( ( )
( t Ag f t x
2F
(2)と表せる.ここでは流体の密度,Aはフロートの総面積,g は重力加速度である.したがって単位高さあた りの浮力を
とすると, Ag
であり,式は
) ( )
(
0 )
(
0 ) (
) (
2 2
1 1 1
1 1 1
2 1
t f kX x k x m
x c X x k x m
x X nk x X K X M
(3) と表すことができる.波の変位は一般に周期的な変化を伴うことから,以下の式を仮定すると,系は角周波数ω の調波外力による強制振動の問題として取り扱うことができる.ここでhは波高である.
t h t
f ( ) sin
(4)図2は単位高さあたりの浮力
による系の固有振動数の変化を示している.ここで
,
は大振動子と小 振動子の質量中心とを二自由度不減衰練成振動系とみた場合の固有角振動数,
tは不減衰の場合の小振動子の固 有角振動数である.図2より単位高さあたりの浮力
により,各固有角振動数が変化していることがわかる.
tを
または
に近づけることで振動子間にうなりによるエネルギー移動が発生する.したがって,単位高さあ たりの浮力
の値を考慮して,エネルギー移動が発生するように系のパラメータを設計する必要がある.このう なりによる線形振動子間のエネルギー移動は,小振動子と特殊小振動子間の質量比が大きくなる極限において非 線形多体衝突振動系に発生するGroverアルゴリズムと一致することから(内田他, 2010),以下ではこのエネルギー移動もGroverアルゴリズムと呼び,特に両者を区別しないこととする.
Fig.1 Schematic figure of multi mass-spring-oscillators model for wave power generator.
Fig.2 Change of eigen angular frequencies of multi mass-spring-oscillators model with buoyant force parameter.
3. 模擬実験装置のパラメータの検討 3・1 模擬実験装置
今回,机上における大きさの水槽内での波力発電をおこなう模擬実験装置を念頭に,設計パラメータについて 検討した.模擬実験装置の概略を図3に示す.水の入った水槽内に 6 個のフロートを設置し,これらフロートを,
ばねによって天井より吊るされた水平板により,ばねを介して大域的に結合させる.また,発電装置として水平 板にばねを介して磁石を取り付ける.ここで,フロート,水平板,磁石はそれぞれ図1の小振動子,大振動子,
特殊小振動子に相当することから,n=7となる.また,発電方法として,特殊振動子の振動を用いた電磁誘導を 考え,コイル内を磁石が運動することにより発電を行う.
ここで,磁束密度Bの磁石が速度
v
1で運動しているとする.磁束ベクトルと導線のなす角度を
,磁場を横切る導線の長さをl,導線に接続されている電気抵抗の大きさをRとすると,電磁誘導によって特殊振動子に働く 反力
F
eは1 2
sin )
( v
R F
e Bl
(5) となる.ここで,B,l,R,
が一定であるとすると,定数c
により次式のように表され,これにより発電時 の反力は速度に比例する減衰力となることがわかる.cv
1F
e
(6)Fig.3 Schematic figure of experimental set-up for multi mass-spring-oscillators model.
3・2 模擬実験におけるパラメータ設計
ここでは模擬実験装置を念頭に,Groverアルゴリズムと同様なエネルギー移動が発生するパラメータ設計につ いて検討する.まず始めに,水槽内で発生する波の周期は水槽のスロッシング周期によって決定する.水槽の寸 法を水槽奥行W,水槽幅L,液深さHとすると,水槽の一次モードスロッシング周期のT は次式で表される.
W g H
T
W
2 tanh
(7) 式より水槽奥行,液深さによってスロッシング周期は図4(a)のように変化する.ここで,今回考察する模擬実験 用の水槽の寸法は,机上における小さいものを念頭に置いたことから,W 600mm,L 295mmとした.し
Coil Magnet
Plate
Float
Oscilloscope Water tank
たがって,水槽のスロッシング周期は水深によって決定される.図4(b)はW 600mmにおける水槽のスロッシ ング周期の変化である.本実験のパラメータとして水槽の寸法を奥行600mm,幅295mm,水の深さ300mmのよ うにすると,一次から三次モードまでの水槽のスロッシング周期は0.92 s,0.52 s,0.39 sのように変化する.よ って各スロッシングの角周波数は,6.83 rad/s,12.1 rad/s,16.1 rad/sとなる.
次にフロートについて検討する.本実験では円筒型のフロートを各水槽に3個,計6個のフロートを用いる ものとする.水の密度
=997kg/m3,フロート半径を0.040 m,フロートの断面積を0.00503m2とするとフロート 全体が受ける単位高さあたりの浮力
は49.16N/mとなる.Fig.4 Change of sloshing period with (a) water depth and tank width, (b) water depth with tank width of 600mm.
以上までのパラメータを用いて各振動子の質量,ばね定数を決定する.今回,不減衰時の固有角振動数からパ ラメータを決定する.このとき
tを連成固有振動数である
または
に近づけることでGroverアルゴリズム と同様な振動子間のエネルギー移動が発生することから,本研究では
t
とすることとした.(
を
としても同じであると考えられる.)さらに,共振現象を利用することから,特殊小振動子の固有振動数
1
1
1
m
k
と系の固有振動数
t,
をスロッシング周波数を近づけるよう設計を行った.実験装置のスケールよ り,0.1 kg M 0.5 kg,0.1 kg m
1
0.5 kg,0.1 kg m
0.5 kg,10 N/m K 1000 N/m,10 N/m k
1
1000N/m,10 N/mk 1000 N/mとなるよう設計をおこなう必要があることから,一次モードのスロッシング振動数
について,上記の条件を満たすパラメータ設計が困難であった.そのため,本設計では,二次モードのスロッシ ング振動数を用いるものとして,各パラメータを算出した.これにより算出されたパラメータは,M=0.5 kg,m1=0.1 kg,m=0.414 kg,K= 256.66 N/m,k1=14.6 N/m,k=10 N/mとなった.このパラメータより不減衰時の系の固有角振 動数は,
=26 rad/s,
t=12.01 rad/s,
=11.45 rad/sとなる.3・3 自由振動下でのシミュレーション
上記までに求めたパラメータより,Groverアルゴリズムと同様なエネルギー移動が発生することを確認する.
波の変位
f ( t ) 0
とした場合の不減衰時の自由振動について,初期条件を,X=x1=x2=0 mm,V=0 mm/s,v1=v2= 10 mm/sのように定め,シミュレーションを行った.図5(a),(b)は各小振動子の変位の時間変化とエネルギーの時間 変化を表している.ここで,各振動子のエネルギーおよび振動子のエネルギーの総和は,以下の式により定義さ れる.(a) (b)
1 2 1 2 1 1 1
2 2
) 2 (
1 2
1 2
1 2
1
X x k v m E
KX MV
E
2 2 22
2
( )
2
2 mv n k x X
E n
2
1
E
E E
E
total
(8)
Fig.5 Temporal change of (a) positions and (b) velocities of free multi mass-spring-oscillators.
Fig.6 Temporal change of energy concentration to special small oscillator in free multi mass-spring-oscillators.
Groverアルゴリズムの働きによる特殊小振動子へのエネルギー集中率を図6に示す.図より概周期振動が発生し
ており,小振動子のエネルギーが最小となるとき特殊小振動子のエネルギーが最大となっていることがわかる.
Groverアルゴリズムの特徴と同様の挙動と示していることから,今回設計したパラメータにおいてこのアルゴリ
ズムと同様なエネルギー移動が可能となったものと考えられる.
3・4 強制振動下でのシミュレーション
波は時間的な周期性を有することから,波の変位を
f ( t ) h sin t
として,周波数に対する応答について検討 する.ここで,特殊小振動子に接続された発電機に起因する減衰比
は,1 1 1
2 m k
c
(9)
(a) (b)
であり,図7は減衰比
0 . 001
,波高h0.06mにおける波の振動数に対する各振動子の応答倍率の変化を示 している.図7より,前述した系の固有振動数付近で共振現象が発生し,変位が増大していることがわかる.
=26 rad/sでは系の固有振動数
と共振を起こすが,このとき,大振動子の変位の増加量が,他の振動子に比べ,大きくなった.また,
=11.4 rad/s,12 rad/sのとき,系の固有振動数
,
tとそれぞれ共振し,このとき,特 殊小振動子の変位の増加量が,他の振動子に比べ,大きくなった.Fig.7 Relation between excited frequency and amplitude of oscillators, in case
=0.001 and h0.06m.Fig.8 Temporal change of (a) positions and (b) velocities of excited oscillators, in case
=0.01 and h0.06m.図8(a),(b)は波高h0.06m,波の振動数
=12 rad/s,減衰比 0 . 01
のときの各振動子の変位,エネルギー をそれぞれ表し,図9はこの条件下での特殊小振動子へのエネルギー集中率の時間変化を表している.図より運 動開始から約30 s後以降,特殊振動子の変位が大きい状態で定常的な振動を継続し,特殊小振動子へエネルギー が集中し続けることがわかる.Fig.9 Temporal change of energy concentration to the special small oscillator, in case
=0.01 and h0.06m.一方,今回目標とする模擬実験装置では波のスロッシング振動数
は約12 rad/sとなるため,共振点付近
=9~15 rad/sにおける波高h=0.06 mの波による周波数応答を図10に示す.この際,発電による減衰比 を0.01~
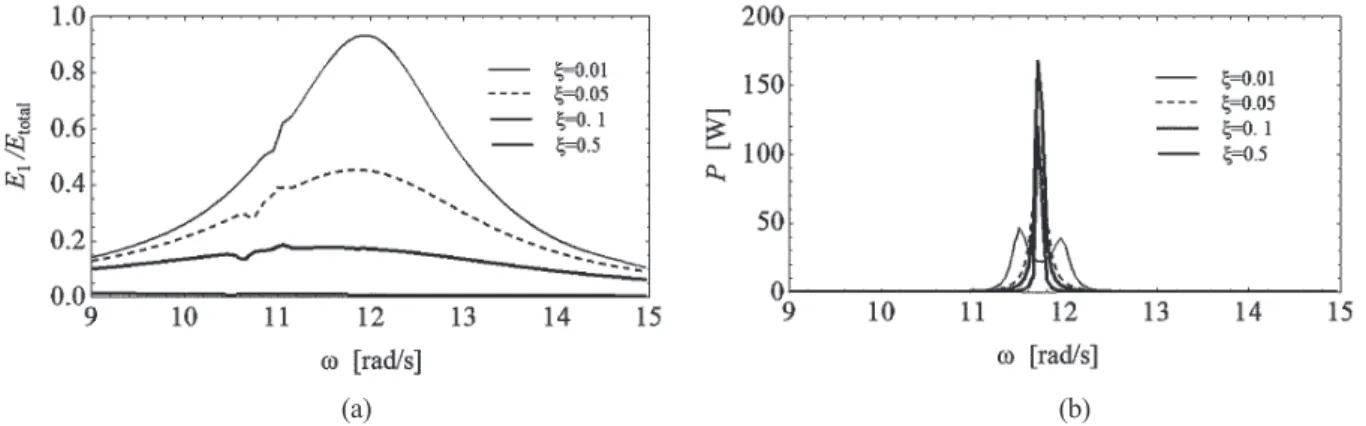
0.5まで変化させた.この際の波の振動数に対する特殊小振動子へのエネルギー集中率,特殊小振動子に接続され た発電機による単位時間当たりの発電エネルギーの周波数依存性をそれぞれ図11(a),(b)に示す.特殊小振動子に おける単位時間当たりの発電エネルギーは
t dt v P c
t t t
1112 1
(10) で与えられる.ここでは,振動が十分発達した状態から単位時間当たりの発電エネルギーを求めるため
t
1=500 s,t
=5 sとし,波高をh=0.06 mとした.Fig.10 Relation between excited frequency and amplitude of oscillators with various damping, in case h0.06m.
同じ条件下での特殊小振動子へのエネルギー集中率においては,図11(a)に示されるように,波の振動数
=11.8rad/s付近で特殊小振動子へのエネルギー集中率が増大している.また,減衰比の増加に伴い,特殊小振動子への
エネルギー集中率が低下することがわかる.これは減衰による特殊小振動子の振幅の低下に加え,不減衰を基準
として設計された系からずれたことで,振動子間のエネルギー移動量が減少したためであると考えられる.また,
図11(b)より単位時間当たりの発電エネルギーは,減衰比 が0.01の場合においては波の振動数
が11.4 rad/s,12 rad/s付近で増大するが,減衰比 が比較的大きい0.05~0.5では,波の振動数
=11.8 rad/s付近で増加することがわかる.このことから,波の振動数により,特殊小振動子の減衰比である発電量を適切に変化させることで,
広い範囲で発電を効率的に行えるものと考えられる.
(a) (b)
Fig.11 Relation between excited frequency and (a) energy concentration to the special oscillator, (b) power of wave generator in multi mass-spring-oscillators with various damping, in case h0.06m.
3・5 フロート長さの影響
以上までに,強制力に対する各振動子の応答について述べたが,実際にはフロートの長さにより,ある条件に おいてフロートが宙吊り状態や全水没状態になることが考えられる.これらの状態はフロートの振幅が大きくな る共振点付近で発生すると考えられ,共振点付近において十分な力を受けることができない可能性がある.した がって,ここでは宙吊り状態や全水没状態になった場合に系がどのような挙動を示すかについて考察する.
Fig.12 Schematic figure of float with mean draft rate.
図12に示すようにフロートの長さをl,無負荷・静止状態で釣り合っている状態におけるフロートの基準喫水 率を
とする.これより,f ( t ) x
2 l
となるとき,フロートが宙吊り状態となり,フロートが受ける外力) (t F
は,l t
F ( )
(11)となる.また,
f ( t ) x
2 ( 1 ) l
のとき,フロートが全水没状態となり,フロートが受ける外力F (t )
はl
t
F ( ) ( 1 )
(12)となる.したがって,宙吊り状態や全水没状態時にはフロートが受ける外力
F (t )
には波高の影響が現れず,一 定の外力を受ける.(a) (b)
Fig.13 Temporal change of (a) positions and (b) energies of excited multi mass-spring-oscillators, in case
=0.01, h=0.06 m, the flat length is 0.2m and mean draft rate is 0.5.Fig.14 Temporal change of energy concentration to special small oscillator in excited multi mass-spring-oscillators, in case the flat length is 0.2m and mean draft rate is 0.5.
図13(a),(b)には,波の振動数
12rad/s,波高h0.06m,減衰比 0 . 01
のときのフロートの長さl0.2 m,釣り合い位置におけるフロートの基準喫水率 0 . 5
とした場合の各振動子の変位,エネルギーをそれぞれ 示し,図14は特殊小振動子へのエネルギー集中率の時間変化を示す.波の振動数
=12 rad/sのとき,フロート の長さが十分であれば図7のような挙動を示すが,フロートの応答倍率x
2/ h
は40程度であるため.フロート の長さがl 0.2mの場合においては,フロートが宙吊り状態や全水没状態が発生すると考えられる.図13(a)よ り,フロートの変位であるx
2の振幅が0.2 m程度になり安定することから,系の挙動はフロートの長さに依存し ていることがわかる.またこれに伴い,図13(b)と図8と比べると,各振動子の振幅,エネルギーともに大きく減 少していることがわかる.以上より,フロートが宙吊り状態や全水没状態になる場合,十分な発電効果が得られ ないものと考えられる.今回考察した模擬実験用の水槽の寸法はW 600mm,L295mmと机上における小 さいものについてのみ考察したため,十分な長さのフロートを設置することができない可能性がある.今後は,実験する波高の高さによっては,より大きな水槽も念頭に装置の設計を進める必要があると考えられる.
4. 結 言
本章では,Groverアルゴリズムを用いた多体振動系による波力発電について,そのモデルを示し,机上での模 擬実験装置を念頭に,装置の設計パラメータについて検討したところ,以下のことが明らかになった.
(1) 本研究では,机上の模擬実験装置の設計について検討し,水槽の二次のスロッシング振動数と共振を発 生させる設計パラメータを導出した.
(2) フロートが浮力による力を受けることにより,系の固有振動数が変化する.このためフロートの面積を 考慮して,系のパラメータを設計しなければならない.
(3) 装置の固有振動数
tと特殊小振動子の固有振動数
1,系全体の連成固有振動数
(もしくは
)をスロッシング周波数に近づけるよう設計することで,Groverアルゴリズムと同様に振動子間のエネルギ ー移動を実現し,フロートが受ける波力エネルギーを発電をおこなう特殊小振動子に集中させることが できる可能性がある.
(4) 波の変位が時間周期性を持つものと考え,装置の周波数応答特性についてシミュレーションをおこなっ たところ,系の固有振動数と波の振動数が一致する際,共振により振動子が増振され,効果的な発電が 確認された.
(5) 特殊振動子の減衰比である発電量を適切に変化させることによって,広い周波数帯域の波において,高 い発電効果が得られる可能性がある.
(6) フロートが宙吊り状態や全水没状態になる場合,波より十分な力を受けることができず,発電効率が低 下することから,波高に合わせてフロートの長さを検討する必要がある.
文 献
Grover, L. K., Quantum Computers Can Search Arbitrarily Large Databases by a Single Query, Physical Review Letter Vol.79, No.23 (1997), pp. 4709-4712.
Imai, Y., Nagata, S. Toyota, K., Murakami, T. and Setoguchi, T., Conversion Efficiency of Floating Pendulum Wave Energy Converter in 2D Regular Waves, International Symposium on Marine and Offshore Renewable Energy (2013).
Kotake, S., Uchida, H. and Suzuki, Y., Mechanism and Efficiency of Power Generation from Accumulating Spread-Coherent Energy -Application of Wave Algorithm-, Proceedings of International Conference on Power Engineering (ICOPE-09), (2009).
Kotake, S., Yagi, K. and Takata, S., Optimal Sampled-Data Vibration Manipulation Function for One Mass-Spring System Obtained from Three Vibro-Impact Oscillators under Grover Algorithm, Proceeding of the 12th International Conference on Motion and Vibration Control (2014) pp. 2C24.
小竹茂夫, 多体振り子を用いたエネルギー集中機構の波力発電への応用の試み, 佐賀大学海洋エネルギー研究セ ンター報告, No. 19 (2014), pp. 33-37.
Patel, A. D., Wave Algorithm: Optimal Database Search: Wave and Catalysis, International Journal of Quantum Information Vol.4, (2006), pp. 815-825.
高田宗一朗, 小竹茂夫, 鈴木泰之, 一振動子に結合された内部共振衝突振動系に現れる周期的な完全概周期振動 の波動アルゴリズムによる解析, 日本機械学会論文集C編, Vol. 77, No. 773 (2011), pp. 14-27.
種浦圭輔,中野公彦,Pallav Koirala,羽田野 袈裟義, 浮体式波力発電装置の共振特性,日本機械学会論文集 C 編, Vol.76, No. 761 (2010), pp. 44-50.
内田秀範,小竹茂夫,鈴木泰之, Groverアルゴリズムによる空間コヒーレントな波動エネルギの集中, 日本機械学 会論文集B編,Vol.76, No.761 (2010), pp.85-94.
渡部富治,実用に向かう波力発電,パワー社 (2009).
渡部富治,波浪エネルギーの利用,精密機械, Vol. 50, No. 7 (1984), pp. 1166-1172.