卵を回すとなぜ立つか II
2005
年
2月
10日
福井大学 工学部 物理工学科
11年度入学
16番 大森英胤
目 次
序章
2第
1章 剛体の力学
31.1
剛体の定義とつりあい
. . . . 31.1.1
剛体の定義
. . . . 31.1.2
剛体のつりあい
. . . . 41.2
固定軸まわりの剛体の回転運動
. . . . 51.3
慣性モーメントと慣性乗積
. . . . 61.3.1
慣性モーメント
. . . . 61.3.2
慣性乗積
. . . . 61.3.3
慣性楕円体
. . . . 71.4
剛体回転のオイラー方程式
. . . . 91.4.1
慣性テンソル
. . . . 91.4.2
剛体回転のオイラー方程式
. . . . 111.5
ポアンソーの表現法
. . . . 12第
2章 軸対称物体の回転直立
–Moffatt下村理論の紹介–
14 2.1座標系と接触点
. . . . 142.2
ジェレット定数
. . . . 192.3
ジャイロスコピック近似
. . . . 202.4
回転楕円体の場合
. . . . 222.5 Moffatt
下村理論のまとめ
. . . . 24第
3章 数値シミュレーションによる回転直立現象の再現
25 3.1プログラムの改良と検証
. . . . 253.2
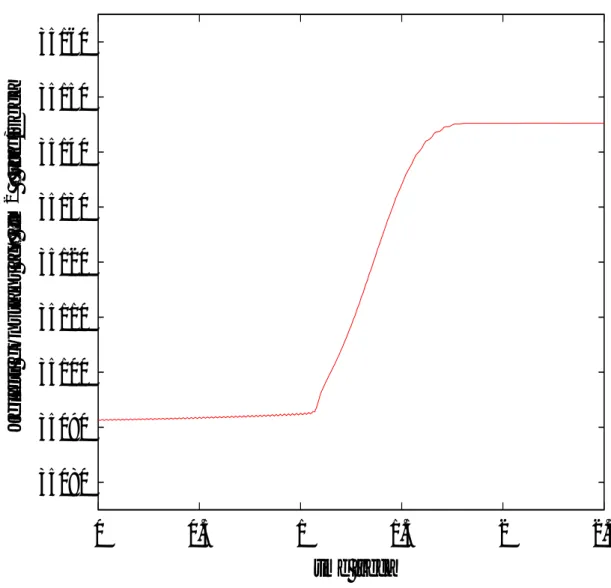
重心位置の上昇の様子
. . . . 273.3
ジェレット定数の時間変化について
. . . . 283.4
ジャイロスコピック近似
. . . . 29第
4章 結論
30関連図書
31謝辞
32付録
Program List 33序章
ゆで卵や碁石などの剛体を机の上において,勢いよく回転させると立ち上がる。この現象の不思議なと ころは,重心が重力に逆らって上昇する,ということである。この現象は
100年以上前から知られてい たが,これまで解明されていなかった。2002 年に
Moffattと下村によって卵のような軸対称物体の回転 に伴う立ち上がりの現象を説明する理論が発表された。
この理論によると, 回転する剛体の運動方程式に対して
Cを対称軸,A をそれ以外の軸まわりの慣性 モーメント,Ω, n をそれぞれ鉛直軸,対称軸方向の角速度,θ を鉛直軸と対称軸のなす角度としたとき
Cn=AΩ cosθ
という近似を用いると,運動方程式を積分することができる。この近似をジャイロスコ
ピック近似とよび,回転が速い場合においては, 自然な仮定であるが,定量的な検討はまだなされたこ とがない。
軸対称物体の立ち上がり現象と関係の深いものとして,逆立ちごまがある。逆立ちごまのような偏心 球の回転に伴う立ち上がりの現象は,1952 年
Braamsおよび
Hugenholtzによって厳密解が得られてい て,そこにはジェレット定数とよばれる運動定数が存在することがわかっている。Moffatt と下村の理 論では一般の軸対称物体に対しても, このジェレット定数が保存される。上述の記号および重心の高さ
hを用いると
J =AΩhと表される。このジェレット定数を用いると運動方程式は非常に簡単な形で書く ことができ, 容易に積分できるようになる。
本卒業研究では剛体の並進
·回転運動を表す微分方程式を
4次のルンゲクッタ法を用いて解き,上記
の近似を用いずに軸対称物体の回転直立現象を再現し,その際にジャイロスコピック近似がどの程度の
精度で成立しているのか や ジェレット定数の時間変化について調べた。
第 1 章 剛体の力学
この章の執筆にあたり,文献
[4, 5]を参考にした。
1.1
剛体の定義とつりあい
1.1.1
剛体の定義
剛体とは形が全く変化しない物体のことをいう。言い替えると,物体内の質点間の距離
|ri−rj|がい つでも全て一定に保たれている質点系であるということができる。
剛体の
3点に
A,B,Cと目印を付けると,この
3点の位置が決まると剛体の位置も向きも決まる。まず
A
の位置を決めるには,x
A, yA, zAの
3個の座標を決めなければならない。次に
Bの位置を決めるには,
AB
の長さは決まっているので,極座標と同様に線分
ABの方向
θと向き
φを決めればよい。C は
ABを軸として回転する角
ψによって決まる。すなわち剛体の運動は
6個の変数によって記述されることが 分かる。このことを剛体の自由度は
6であるという。
一般に拘束条件が
1個増えると自由度は
1減るということができる。
1.1.2
剛体のつりあい
剛体がつりあいを保つということは,次の
2つが成り立っていることである。
(1)
剛体の重心が静止している。
(2)
剛体の重心まわりで回転が起こっていない。
剛体の重心の位置をR, 剛体を質点の集まりとして見たときの各質点の位置と質量をそれぞれ
r1,r2,· · ·, m1, m2,· · ·とし,全質量を
Mとすると重心は次のように定義される。
R=m1r1+m2r2+· · ·
M (1.1)
(1.1)
式の両辺を時間で
2回微分して変形すると
Md2R
dt2 = m1r¨1+m2r¨2+· · ·=X
i
mir¨i (1.2)
また
i番目の質点が受けている外力を
Fiとする。剛体内の質点が及ぼしあう内力は打ち消し合うこと を考慮すると
(1.2)式は
Md2R dt2 =X
i
Fi (1.3)
となる。すなわち
(1)の条件は
X
i
Fi= 0 (1.4)
とかくことができる。
2)
の条件については重心まわりの角運動量
L0が常に
0であると言えればよい。すなわち
ddt X
i
L0= d dt
X
i
r0i×mir˙0i=X
i
r0i×Fi = 0 (1.5)
であればよい。また重心も動かないので
LG= 0であり,
X
i
ri×Fi= 0 (1.6)
とかくことができる。
(1.4)
式と
(1.6)式をそれぞれ成分に分けた
6個の式が,つり合いの条件式である。
1.2
固定軸まわりの剛体の回転運動
剛体が固定した軸のまわりで回転するときは,p3 でも述べたように自由度は
1である。
固定軸を
z軸にとり角速度を
ωとする。また剛体を質点の集まりとみなすとして
i番目の質点の質量 を
mi,軸からの距離を
riとする。質点の
x座標からの偏角を
θiとすると
ω= dθi
dt (1.7)
であり,質点
iの運動量は
miriω,軸zに関する角運動量は
mir2iωである。したがって全角運動量
Lzは
Lz=Xi
miri2ω (1.8)
となる。ここで
Iz = X
i
miri2
= X
i
mi(x2i +yi2) (1.9)
を固定軸
zまわりの剛体の慣性モーメントという。これを用いると,軸のまわりの角運動量は
Lz=Izω (1.10)
となる。
1.3
慣性モーメントと慣性乗積
1.3.1
慣性モーメント
剛体に固定した直交座標軸
ξ, η, ζをとり,剛体を質点の集まりとしてみたときの質点の質量を
mi,位 置を
(ξ, η, ζ)とする。ξ, η, ζ 軸まわりの慣性モーメントはそれぞれ
Iξ =X
i
mi(ηi2+ζi2) Iη =X
i
mi(ζi2+ξ2i) (1.11)
Iζ =X
i
mi(ξ2i +η2i)
となる。剛体を密度が
ρ(ξ, η, ζ)の連続体として扱える場合には,慣性モーメントは次のように求めるこ とができる。
Iξ = Z Z Z
ρ(ξ, η, ζ)(η2+ζ2)dξdηdζ Iη=
Z Z Z
ρ(ξ, η, ζ)(ζ2+ξ2)dξdηdζ (1.12)
Iζ = Z Z Z
ρ(ξ, η, ζ)(ξ2+η2)dξdηdζ
また
Mを剛体の質量として,慣性モーメントを
I=M k2 (1.13)
とおいたときの
k,すなわち qI
M
のことを回転半径と言う。
1.3.2
慣性乗積
剛体に固定した座標系
ξ, η, ζに関して次の量を慣性乗積という。
Iξη=X
i
miξiηi
Iηζ =X
i
miηiζi (1.14)
Iζξ=X
i
miζiξi
この量は対称性がよい場合
(例えば(ξ, η, ζ)⇒(−ξ, η, ζ)が成り立つ場合) は全て
0になる。
1.3.3
慣性楕円体
剛体に固定した座標軸
O−ξηζに関する慣性モーメントと慣性乗積がわかっているとする。このとき
Oを通る任意の軸
OXと
ξ, η, ζ軸とのなす角の
cosをそれぞれ
λ, µ, νとする。
Pi
Qi
O
ξ
ζ
υ η µ λ
X
θi
剛体内の一点
Pi(ξi, ηi, ζi)から
OXにおろした垂線を
PiQi, OPiと
OXiのなす角を
θi, OPi =riとす ると
cosθi= 1 ri
(λξi+µηi+νζi) (1.15)
とかけるから
PiQ2i = r2i sin2θi
= r2i −ri2cos2θi
= (ξ2i +η2i +ζi2)−(λξi+µηi+νζi)2
ここで
λ2+µ2+ν2= 1であるから
PiQ2i = (ξi2+η2i +ζi2)(λ2+µ2+ν2)−(λξi+µηi+νζi)2
= (ηi2+ζi2)λ2+ (ζi2+ξ2i)µ2+ (ξi2+ηi2)ν2
−2µνηiζi−2νλζiξi−2λµξiηi
これに
miをかけて加え
Xi
miPiQi
2 = X
i
(ηi2+ζi2)λ2+X
i
(ζi2+ξi2)µ2+X
i
(ξi2+ηi2)ν2
−2X
i
µνηiζi−2X
i
νλζ iξi−2X
i
λµξiηi
とすると,これは
OXまわりの慣性モーメント
IOXとなるが,ここで
(1.11)式と
(1.14)式を用いて書 きかえると
IOX =Iξλ2+Iηµ2+Iζν2−2Iηζµν−2Iζξνλ−2Iξηξη (1.16)
となる。
(1.16 )
式の
λ, µ, νにそれぞれ
ξ, η, ζを代入して,I
OX = 1とすると
Iξξ2+Iηη2+Iζζ2−2Iηζηζ−2Iζξζξ−2Iξηξη= 1 (1.17)
となる。この式を満足する点
(ξ, η, ζ)は一つの楕円体面をつくる。これを慣性楕円体という。この楕円 体と
OXとの交点を
R(ξX, ηX, ζX)とすると,OR
=rとすると
ξX=rλ, ηX=rµ, ζX=rν
であり,これらを
(1.17)式の
ξ, η, ζに代入すると
r2(Iξξ2+Iηη2+Iζζ2−2Iηζηζ−2Iζξζξ−2Iξηξη) = 1 (1.18)
ここで
(1.18)式の括弧の中は
IOXに他ならないので
r2IOX = 1
⇒ IOX = 1
r2 (1.19)
となる。このことは原点
Oをきめて,それに対応した慣性楕円体を描き
Oを通る任意の軸と慣性楕円 体との交点を
Rとするとその軸のまわりの慣性モーメントは
IOX = 1/ OR (1.20)
で与えられることを意味している。
慣性楕円体は,原点のとり方には依存するが,ξ, η, ζ 軸のとり方には依存せず,座標軸の方向を適当
に選ぶことで
(1.18)式は
Aξ2+Bη2+Cζ2の様な形にすることができる。このように選んだ
ξ, η, ζ軸
を,慣性主軸に対する慣性モーメントを主慣性モーメントと言う。
1.4
剛体回転のオイラー方程式
1.4.1
慣性テンソル
i
x
y
z ω
ri
O
ξ
η ζ
図
1.1: ωで回転する剛体
図
1.1のように
Oを固定点とし,実験室系
O−xyzと重心系
O−ξηζをとる。剛体の点
Oに角速度
ωを与えると剛体上の任意の点
riは時間
dtに
ω,riの両ベクトルに対して垂直な方向に
(|ri|sinθi)ωdt動くことになる。すなわちこの瞬間における
riの速度は
˙
ri=ω×ri (1.21)
と表すことができる。この
(1.2)式に
miを掛けて
iについて和をとると,剛体の運動量
Pは
P = Xi
mir˙i=ω×X
i
miri
= ω×MR (1.22)
とかける。ここで
Mは剛体の全質量で,R は剛体の重心である。
点
Oのまわりの角運動量
Lは
rと
Pとの外積で
L=Xi
mi(ri×r˙i) =X
i
miri×(ω×ri) (1.23)
となる。ここで
Lの
x成分は
Lx = X
i
mi[yi(ωxyi−ωyxi)−zi(ωzxi−ωxzi)]
= X
i
mi[(y2i +zi2)ωx−xiyiωy−zixiωz]
とかける。重心系で表すと
Lξ =X
i
mi[(ηi2+ζi2)ωξ−ξiηiωη−ζiξiωζ] (1.24)
慣性モーメント
Iξ =Pimi(η2i +ζi2)
と慣性乗積
Iξη=Pimiξiηi, Iζξ=P
imiζiξi
を用いて
(2.4)式 を書き換えると
Lξ =Iξωξ−Iξηωη−Iζξωζ (1.25)
となる。η,ζ の成分も同様に
Lη=Iηωη−Iηζωζ−Iξηωξ (1.26) Lζ =Iζωζ−Iζξωξ−Iηζωη (1.27)
となる。(1.25) 式,(1.26) 式,(1.27) 式をまとめて行列で書くと
Lξ
Lη
Lζ
=
Iξ −Iξη −Iζξ
−Iξη Iη −Iηζ
−Iζξ −Iηζ Iζ
ωξ
ωη
ωζ
(1.28)
となる。この
(1.28)式の右辺の
3行
3列の行列で表される量を慣性テンソルという。また慣性乗積は 対称性がよくなるように座標系を選んでやると,すべて
0にすることができることから,そのとき
(1.28)式は
L0ξ L0η L0ζ
=
Iξ0 0 0 0 Iη0 0 0 0 Iζ0
ω0ξ ωη0 ω0ζ
(1.29)
とすることができる。この
Iξ0, Iη0, Iζ0を主慣性モーメント,この時の座標軸の方向を慣性主軸という。
1.4.2
剛体回転のオイラー方程式
剛体上のベクトル
B(t)の微小時間
dtにおける変位
dBを
(1)重心系
O−ξηζからみたときの
Bの変化
(2)
実験室系
O−xyzからみたときの
Bの変化 の
2つの場合に分けて考えてみる。
(1)
の場合の
ξ, η, ζ成分は
dBξ, dBη, dBζである。(2) の場合は
(ω×B)dtとなる。これらのベクトル和 である
dBを
dtで割ると
dB dt
ξ
= dBξ
dt + (ω×B)ξ
dB dt
η
=dBη
dt + (ω×B)η (1.30)
dB dt
ζ
=dBζ
dt + (ω×B)ζ
となる。ξ, η, ζ 軸を慣性主軸に一致させたときの
Oに関する全角運動量
Lは
(1.29)式
Lξ =Iξ0ωξ, Lη =Iη0ωη, Lζ =Iζ0ωζで与えられ,時間微分すると
dLξdt =Iξ0dωξ
dt , dLη
dt =Iη0dωη
dt , dLζ
dt =Iζ0dωζ
dt (1.31)
となる。(1.31) 式と
Lを
(1.30)式に用いると,ξ 成分については
dLdt
ξ
= Iξ0dωξ
dt + (ωηLζ−ωζLη)
= Iξ0dωξ
dt + Lζ
ωζ
−Lη
ωη
ωηωζ
= Iξ0dωξ
dt −(Iη0−Iζ0)ωηωζ (1.32)
となる。同様に
η, ζ成分は
dL dt
η
= Iη0dωη
dt −(Iζ0−Iξ0)ωζωξ dL
dt
ζ
= Iζ0dωζ
dt −(Iξ0−Iη0)ωξωη
となり角運動量に対する運動方程式
dLdt = N
= X
i
(ri×Fi)
に代入すると,重心系の各成分は
Iξ0dωξ
dt −(Iη0−Iζ0)ωηωζ = (X
i
ri×Fi)ξ
Iη0dωη
dt −(Iζ0−Iξ0)ωζωξ = (X
i
ri×Fi)η (1.33)
Iζ0dωζ
dt −(Iξ0−Iη0)ωξωη= (X
i
ri×Fi)ζ
これを剛体の回転に対するオイラー方程式という。
1.5
ポアンソーの表現法
外力が
0の場合のオイラー方程式は
Iξ0dωξdt = (Iη0−Iζ0)ωηωζ
Iη0dωη
dt = (Iζ0−Iξ0)ωζωξ (1.34)
Iζ0dωζ
dt = (Iξ0−Iη0)ωξωη
となるが,(1.34) 式にそれぞれ
ωξ, ωη, ωζを掛けて加えると
Iξωξdωξdt +Iηωηdωη
dt +Iζωζdωζ
dt = 0 (1.35)
となる。この
(1.35)式を積分すると
12(Iξωξ2+Iηω2η+Iζω2ζ) =const (1.36)
となる。この
(1.36)式の左辺は剛体の力学的エネルギーになっていて,力学的エネルギーが保存されて いることが確認できる。
また,(1.34) 式にそれぞれ
Iξωξ, Iηωη, Iζωζを掛けて加えると
Iξ2ωξdωξ
dt +Iη2ωη
dωη dt +Iζ2ωζ
dωζ
dt = 0 (1.37)
となり,この
(1.37)式を積分すると
Iξ2ωξ2+Iη2ω2η+Iζ2ω2ζ =const (1.38)
となる。I
ξω=Lξであり,(1.38) 式から角運動量が保存されることが確認できる。
慣性楕円体で点
Oから引いた
ωに平行な直線を考える。この直線と慣性楕円体との交点を
Wとして,
OW =l
とすると,点
Wの座標
(ξW, ηW, ζW)は
ξW =lωξω, ηW =lωη
ω , ζW =lωζ
ω (1.39)
となる。これらは慣性楕円体上にあるので
Iξξ2+Iηη2+Iζζ2= 1を満たすので
l2ω2(Iξω2+Iζω2+Iηω2) = 1 (1.40) (1.36)
式の右辺を
Kとすると
(1.40)式は
ω=√
2Kl (1.41)
となる。
点
Wで慣性楕円体に接する平面上の点を
r0 = (ξ0, η0, ζ0)とするとこれらは
IξξWξ0+IηηWη0+IζζWζ0= 1 (1.42)
を満たすことが解析幾何学で知られている。これに
(1.39)式を代入すると
l
ω(Iξωξξ0+Iηωηη0+Iζωζζ0) = 1 (1.43)
⇒Lξξ0+Lηη0+Lζζ0 =ω l =√
2K (1.44)
となる。左辺は
L·r0であるが,これが一定であるということは,r
0の乗る平面が
Lに垂直であるこ とを示している。原点
Oからこの接平面への垂線の長さを
hとすると,L
·r0 =|L|hであり,これが
√2K
に等しいから
h=
√2K
L (1.45)
である。K, L は一定であることから
hも一定である。このことからこの接平面は空間に固定した一定不 変の面であるとわかる。これを不変面と言う。点
Oを固定した慣性楕円体は,不変面に接しながら,滑 べること無く,転がっていく。その回転の角速度は,各瞬間における
OWの長さに比例する。
このとき,接点
Wが不変面上に描く曲線をハーポールホード,慣性楕円体上にのこす軌跡をポール ホードという。このように,慣性楕円体の運動として剛体の運動を表す方法をポアンソーの表現法と いう。
L ω
ハーポール ホード
ポール ホード
図
1.2:ハーポールホードとポールホード
ζ
η ξ
O
図
1.3:ポールホード
第 2 章 軸対称物体の回転直立
–Moffatt 下村理論の紹介 –
この章では文献
[1, 2, 3]をもとに
Moffattと下村による軸対称物体の回転直立の理論の詳細な解説を 行う。
2.1
座標系と接触点
ξ
ζ
X Z
θ O
h(θ) R
P g
図
2.1:回転する軸対称物体
点
Oを重心とする任意の軸対称物体が, 水平面上を滑りながら点
Oのまわりに回転運動をしていると する。考えている瞬間における物体と水平面との接点を
Pとする。点
Pにおいて摩擦力が働かなけれ ば, 運動方程式の解として定常的な歳差運動が存在することは, よく知られている
[4,5]。そこで,さしあ たり定常的な歳差運動が実現していて, したがって, 点
Oの速度はゼロと見なして, 以下の議論を展開す る。その上で, 非常に弱い摩擦力が働いた場合に, その効果により運動にどのような変化が起きるか, 具 体的には点
Oが上昇するかどうか, を考察することにする。
まず座標軸の取り方を説明する。X, Y, Z 系 は 点
Oを原点として水平面内で回転する座標系である。
Z
軸は鉛直上向きであり,
X軸は水平面内に, 点
Pが
XZ平面にのるようにとる。Y 軸は
X軸と
Z軸 とに垂直で,
X, Y, Z軸が右手系をなす向きにとる。X, Y 軸は点
Pの運動に追随して水平面内で回転す るが, 考えている瞬間におけるその角速度を
Ωとする。ξ, η, ζ 系は物体に固定された座標系
(剛体系)で あり, 点
Oを原点とする。ζ 軸は物体の対称軸方向を,
ξ, η軸はそれに垂直な2方向を向くようにとる。
ξ, η, ζ
軸も右手系をなす。形状が軸対称であるため,
ξ, η軸の取り方に任意性はない。ξ, η, ζ 軸は, 物体の
角速度ベクトル
ωで回転している。X
p =OP−→は
Oを原点とした接点
Pの位置ベクトルとする。この
とき物体が受ける力は
・ 重力
Mg= (0,0,−Mg)・ 垂直抗力
R・
Y方向への摩擦力
Fである。摩擦力が
Y方向を向いていることは, 物体の対称軸
(ζ)軸の傾き
(図中のθ)の変化が, 回転角速 度に比べて無視できるほど小さいという仮定の帰結である。
物体の角速度ベクトル
ωの各成分は
ωξ = −Ω sinθ
ωη = θ˙ (2.1)
ωζ = n
となる。
また水平面内回転系での各成分は
ωX = −ωξcosθ+ωζsinθ
= −Ω sinθcosθ+nsinθ
= (n−Ω cosθ) sinθ
ωY = ωη = ˙θ (2.2)
ωZ = ωζcosθ+ωξsinθ
= ncosθ+ Ω sin2θ
ただし
nは
ωの
ζ軸成分で
n= ˙ψ+ Ω cosθ
である。ただし
ψ˙は図
(2.2)に示すような関係にある。
O
Ωcosθ
ω
Ω θ
h(θ) ξ
ζ
X Z
P R
ψ.
図
2.2: 2つの系での
ωと
n主慣性モーメントを
Iξ =Iη =A, Iζ =C
とすると,角運動量
Lの各成分は
Lξ = −AΩ sinθLη = Aθ˙ (2.3)
Lζ = Cn
となる。また
LX = Lξcosθ+Lζsinθ
LY = Lη (2.4)
LZ = −Lζsinθ+Lζcosθ (2.3)
式を
(2.4)式に代入して水平面内回転系にすると
Lは
L= ((Cn−AΩ cosθ) sinθ, Aθ, AΩ sin˙ 2θ+Cncosθ) (2.5)
となる。
この
Lの時間に対する変化は,オイラー方程式
∂L
∂t + (ω×L) =XP×R+F (2.6)
で与えられる。ここで
Fは点
Pにはたらく摩擦力である。
図
(2.3)は角度
θが微小角
∆θ変化したときを描いてある。X’,Z’ は変化後の水平面内回転系の座標軸
で
h’は変化後の重心の高さである。図
(2.3)の点
P付近を拡大したものが図
(2.4)である。ここで線分
LNに着目すると
LN ' −XP∆θ (2.7)
であり,また
LN = OL−ON
= h− h0 cos(∆θ)
である。∆θ
'0のとき,cos(∆θ) = 1 となることから
LN 'h−h0=−∆h (2.8)
ゆえに
XP = dh
dθ (2.9)
となる。これを用いると位置ベクトル
XP = (XP,0, ZP)の成分は
XP =dhdθ, ZP =−h(θ) (2.10)
となる。
また,R
+F = (0, F, R)であるから
XP×(R+F) = (−ZPF,−RXP, F XP) (2.11)
ξ
ζ
X Z
X’
Z’
h(θ) h’(θ)
∆θ θ
O
P -Xp
図
2.3:微小な角度変化
1-Xp
∆θ
N L
図
2.4:微小な角度変化
2となり
(2.6)式を用いるとオイラー方程式の各成分は
ddt[(Cn−AΩ cosθ) sinθ]−AΩ ˙θ = −ZPF (2.12) Aθ¨+ Ω(Cn−AΩ cosθ) sinθ = −RXP (2.13) A˙Ω + d
dt[(Cn−AΩ cosθ) cosθ] = F XP (2.14)