ロボットハンドによる布状柔軟物ハンドリングの研究
小 野 栄 一
電気通信大学大学院情報システム学研究科 博士(工学)の学位申請論文
2008年3月
ロボットハンドによる布状柔軟物ハンドリングの研究
博士論文審査委員会
主査 高瀬 國克 教授
委員 出澤 正徳 教授
委員 田野 俊一 教授
委員 森田 啓義 教授
委員 多田 好克 教授
著 作 権 所 有 者 小 野 栄 一
2008
Studies on Limp Materials Handling with Robot Hand
Eiichi Ono
Abstract
Objects handled by robots are normally rigid objects. There are many soft and flexible industrial objects, but there are few examples of processes in which soft objects are handled only by robots. Many soft objects are encountered in everyday life; therefore, it is necessary for life support robots to effectively and reliably handle these soft objects. Robots in the form of a human, as typified by domestic robots, are being investigated extensively. However, if these domestic robots are to become practical, they should be able to handle soft objects.
The purpose of this study is to develop the technology for automatic handling of cloth and associated system by automating the functions of a human hand for handling cloth (separation of the fabric, gripping the fabric, movement, determining position, etc.). This is done by developing a sensing function to observe the nature of the object to be handled and a robotic hand to handle cloth. The hand should have a finger structure capable of handling diverse and delicate soft objects, which can perform key operations such as separation, movement, application, and positioning of one sheet of cloth.
The proposed method for handling cloth was tested, and its effectiveness was checked and evaluated. Further, the conditions for success in the separation of one sheet of cloth were considered from the experimental and theoretical viewpoints, and a criterion was applied as an empirical rule.
Sewing clothing is a typical industry in which cloth is handled as a soft object. This industry is labor intensive, and its survival in Japan is under threat. Therefore, it is essential to automate various processes in the industry. Many types of automatic sewing machines have been proposed, and sewing machine and transport technology is advanced. However, reliably separating and picking one sheet of cloth from a stack of cloth and placing it in automatic sewing or pressing machines still relies mostly on manpower. Moreover, there are practically no commercial, highly reliable, practical machines for manipulating cloth. If the technology for handling cloth with robotic hands can be advanced, it will contribute not only to automatic sewing but also to the development of robotic technology for handling soft objects.
In Section 1, the necessity of handling soft objects by robots, the characteristics and
properties of cloth as soft objects, issues requiring attention in handling, the objectives of the
present research, and the structure of this paper are described.
In Section 2, handling of cloth in the sewing industry, its automation, and the automated tasks are described. Further, a comparison is made between a robotic hand and a conventional device for picking one sheet of cloth.
In Section 3, the operations of picking and placing cloth performed by a prototype two fingered robotic hand are described. A series of operations are performed by the novel robotic hand, and methods for separating one sheet from a stack of cloth and placing the picked cloth in an arbitrary position, which was difficult with conventional technology, are proposed. The results of the tests are described.
Tests were conducted to evaluate the proposed methods for measuring the thickness of cloth by the robotic hand and for separating one sheet of cloth from a stack of cloth. The minimum thickness of one sheet that can be separated using the robotic hand was 0.2 mm. In cases where it was not possible to properly grip the cloth, it was possible to improve the performance of separating one sheet by either repeating the same operation or automatically changing the height of the finger inserted into the cloth. A method of separating one sheet of meshed fabric cut by a knife was proposed and tested. It was possible to separate woven and knitted fabric, but the reproducibility of separating a sheet of cloth with adhesive interlining was low.
A method of placing cloth on a flat surface was proposed, and placement on a horizontal surface and a 45° sloping surface was tested. In the tests for evaluating the placement on the 45° sloping surface, the ends of the cloth were placed within a tolerance of 1 mm or less, and it was possible to limit the amount of slip of the fabric to 3 mm.
The tension in the cloth was controlled with the combination of an arm and a hand. It was confirmed that by controlling the tension at high frequency by the hand and the coordination action of the arm, it was possible to track the fluctuations in the tension in the cloth within the target value of tension.
The two fingered robotic hand described in Section 3 was specialized for pick and place
operations; it was difficult to achieve the wide range of cloth handling operations that a human
hand is capable of. Therefore in Section 4, a prototype three fingered robotic hand having a
palm mechanism resembling the hand of a human is described. The prototype three fingered
robotic hand has several functions. A 3-D simulator with a teaching function simulating the
robotic hand was constructed, and various finger operations were simulated. These operations
were performed with the actual robotic hand. Further, the task of picking up a sheet of cloth
with two fingers, which was similar to that performed by human fingers, was selected. A
method for separating one sheet of cloth from a stack of cloth was proposed, and the
conditions for ease of pick up when separating one sheet of cloth were investigated. A method
for forming a crease and holding a sheet of cloth, and a method for lifting the sheet of cloth
were proposed and implemented, and separation of one sheet of cloth was achieved.
Investigations on the position from which the sheet of cloth must be held to easily form a crease showed that it is desirable to move the edge of the sheet of cloth in the direction of movement of the finger by half the “bending length” of the sheet of cloth.
In Section 5, a method of unfolding folded cloth onto a flat surface by sight and touch is described, and the feasibility of achieving this is demonstrated by tests. In Section 1, the necessity for coordination between visual and tactile sensing was described. As an example of this, unfolding of polygonal shaped cloth onto a flat plane was investigated. From the visual information, information on the outline of the sheet of cloth was obtained and the angle of the fold in the sheet of cloth was inferred. Further, the tactile information helps to get a suitable grip and confirms the direction of the fold. This was the first prototype robotic system that unfolds a sheet of cloth.
In the concluding Section 6, each section is summarized and future tasks are stated.
ロボットハンドによる布状柔軟物ハンドリングの研究
小野栄一
概要
ロボットによる物体の操作(ハンドリング)は、対象物として剛体を扱うものが多い。産 業界において柔らかくフレキシブルな対象物は多々あるが、工程全般にわたり柔軟物がロボ ットによってハンドリングされている例は少ない。また日常生活においても多くの柔らかい 物があり、それらを効果的に確実に扱うことが生活を支援するロボットにとって必要となる。
人間型ロボットに代表される家庭ロボット等の研究開発が盛んに行われているが、それらが 真に役に立つためには柔軟物のハンドリングは避けて通れない。
典型的な柔軟物である布を取り扱う衣料縫製産業は、労働集約型であり、我国における立 地条件が脅かされている。そこからの脱皮を図るためには生産プロセスの自動化が欠かせな い。自動縫製機器が多数提案され、ミシンや搬送技術は進んだが、自動ミシンやプレス機器 などへの生地の設置は未だに人手に多く頼っており、汎用的で確実性の高い布操作の実用機 はほとんどない。
本研究の目的は、布のハンドリング作業における人間の手の機能(生地分離、生地把持、
移動、位置決め等)の自動化を目指し、生地を取り扱う技術及びその関連システムの開発を 行うことにある。この目的のために、対象物の状態を観察するためのセンシング機能と、柔 軟物を繊細かつ多様に扱うことの出来る指構造を有する生地ハンドリング用ロボットハン ドを開発し、生地の一枚分離、移送、あてがい定置などキーとなる動作の実現を図った。提 案する生地ハンドリング法に関し、システムを開発し実験を行い、その有効性を確認し評価 した。また、布の一枚分離に関しては、実験及び理論の観点から成功のための条件について 考察し、経験則としての基準を与えた。
次に、より具体的に論文の概要について述べる。まず、柔軟物の一般的な特性と、柔軟物 ハンドリングにおいて配慮すべき点について検討した。布は剛体と比較し、形の可変性や再 現性の低さに特徴がある。布のハンドリングにはそれらの特徴を考慮したアプローチが必要 であり、センサで状況を確認するとともにエラーリカバリーを想定した作業制御メカニズム が重要であることを示した。これを受けて、本研究では厳密な数式モデルに基づくフィード フォワード制御ではなく、状況監視と動作修正を常時行うフィードバック制御を作業管理に 取り入れ、必要なパラメータは主として実験的に求める手法をとる事とした。
実現する基本作業は、縫製産業を例に、そこにおける作業の分類とその自動化の現状及び
従来の提案機器を参考にし、これまで実現できなかった次の3つに設定した。①積層された 布を1枚づつ確実にとること、②把持した布を水平面に限らず、斜面や垂直面などに位置決 めしてずらさずにセットすること、③折れ曲がった布を平面展開すること。
①の課題の積層された布を1枚分離するための手法として、2本指ロボットハンドを用い て一方の指で布上面を押え、他方の薄い円弧板状の指を挿入して1枚掴む手法を提案し、ロ ボットハンドを試作してその機能を実現した。把持枚数が一枚か否かの判断が従来困難であ ったが、試作した2本指ハンドで、布を把持した際に、ロボットの円弧状の指の歪み具合か ら、布の厚みを推測する手法を提案し、システムの実装と実験により有効性を確認した。試 作した2本指ロボットハンドでは、0.1mm~3mm の間で、指の歪みと布の厚さにほぼ比例関係 があり、0.1mm の布が適切に、2つ折れなどせずに把持したか区別ができることが確認でき た。布の1枚分離については、円弧状の指を触覚センサとして使い、積層された布の上面を 触って高さを検知して、1枚分離動作を行い、把持した際に、把持枚数を推測し、適切な場 合は持ち上げ、適切でない場合は、そのときのセンサ情報とそれまでのエラー情報を配慮し たエラーリカバリー動作と新たな1枚分離を行うやり方で、実験的に 0.2mm の厚さの布まで 1枚分離することを可能にした。
②の課題については、2本指ロボットハンドで把持した布をセットしたい面に押しつけて、
布をずらさないように、布と面に挟まれた薄い円弧板状の指を抜く手法を提案し、実験的に 有効性を確認した。2本指ロボットハンドは、ピックアンドプレイスに特化していたので、
さらに、より人の手に近い機構の3本指ロボットハンドを試作し、その3Dシミュレータを 作成し、様々な動作を行わせた。この3本指ロボットハンドでより人に近い、しわをよせて めくる動作、すくう動作による1枚分離動作を実験的に試行、提案し、しわがよる条件や、
めくりやすさを考察し、布の「曲げ長さ」との関係を一般化した。ロボットハンドで、積層 された布を1枚分離、把持枚数推定し、目的の位置にずらさずに置く一連の動作を世界に先 駆けて実現できた。
③の課題について、ロボットハンドの多機能化の1つとして視覚と触覚を利用しての平面 展開を行った。視覚情報から布の輪郭を取りだし、折れ曲がっている部分を推測し、その部 分を2本指ロボットハンドで、触覚を利用して確実な把持を確認し、布の位置をずらさない ように平面展開する手法を提案し実現した。布が表に折れておるのか、裏側に折れているの かは、触覚センサとして指を用いて、布の表面形状から推測する手法を示した。ロボットハ ンドで布の平面展開を行ったのは本実験システムが初めてである。
布状柔軟物ハンドリングの3つの基礎的な課題を提示し、それらの解決法を提案し、ロボッ トハンドで実現した。今後の課題としては、①3本指ハンドによる様々なハンドリング操作、
②視覚をリアルタイムにフィードバックして行う視触覚協調の柔軟物ハンドリング作業、③ 複数のロボットハンドによる柔軟物ハンドリング作業、④小型で高性能な触覚センサを有し、
人の手並みの機能性を持つロボットハンドの開発などがあげられる。
目次
1 序論 1 1.1 ロボットによる柔軟物のハンドリングの必要性 ........................ 1 1.2 布の特徴及び特性とハンドリングする上で留意すべき事項 .............. 4 1.3 研究の目的と論文構成 .............................................. 10
2 縫製業界での布のハンドリングとその自動化,課題 11 2.1 緒言 .............................................................. 11 2.2 縫製業界での布のハンドリング作業とハンドリングに関する従来の研究 .. 11 2.3 積層された生地の一枚分離に関する従来の様々な提案 .................. 18 2.4 布のモデルの現状 .................................................. 26 2.5 布のハンドリングの特徴と課題 ...................................... 28 2.6 まとめ ............................................................ 29
3 2本指ハンドによる布のピックアンドプレイス 31 3.1 緒言 .............................................................. 31 3.2 2本指ハンドによる積層された生地の一枚分離法の提案 ................ 31 3.3 実験システムの構成 ................................................ 32
3.3.1 実験システムの概要 ............................................ 32 3.3.2 2本指ハンドシステムの構成 .................................... 33 3.3.3 アームシステムの構成 .......................................... 34 3.4 指の変形を利用した把持した生地の枚数の区別 ........................ 34 3.4.1 生地の厚さの判別 .............................................. 34 3.4.2 実験試料の厚さと指の変形測定実験方法 .......................... 35 3.4.3 生地を把持した時の歪ゲージ出力結果 ............................ 38 3.4.4 生地の厚さと歪ゲージ出力 ...................................... 39 3.4.5 把持する生地の厚さと指の歪の関係 .............................. 40 3.4.6 考察 .......................................................... 44 3.5 積層された生地からの2本指ハンドによる一枚分離動作 ................ 44 3.5.1 考え方 ........................................................ 44 3.5.2 実装 .......................................................... 45 3.5.3 実験方法 ...................................................... 47 3.5.4 実験結果 ...................................................... 49 3.5.5 考 察 ........................................................ 52
3.6 ナイフメッシュ裁断機で裁断された端の曲がった生地の一枚分離動作 .... 53 3.6.1 はじめに ...................................................... 53 3.6.2 ナイフメッシュ裁断生地の1枚分離方法 .......................... 54 3.6.3 実験及び材量 .................................................. 55 3.6.4 実験結果と考察 ................................................ 58 3.6.5 積層された生地の1枚分離のまとめ .............................. 58 3.7 生地を任意の位置に置く動作 ........................................ 58 3.7.1 生地を所定の位置にずらさずに置く方法 .......................... 58 3.7.2 実験方法 ...................................................... 60 3.7.3 実験結果と考察 ................................................ 61 3.8 生地の張力制御 .................................................... 65 3.8.1 はじめに ...................................................... 65 3.8.2 実験方法 ...................................................... 65 3.8.3 実験結果 ...................................................... 68 3.8.4 考 察 ........................................................ 70 3.9 まとめ ............................................................ 70
4 掌を有する3本指ハンドによる布のピックアップ 72 4.1 緒言 .............................................................. 72 4.2 掌と3本指を用いた布の操作 ........................................ 72 4.3 3本指ロボットハンドの動作教示 .................................... 78 4.4 実験に用いた布の摩擦特性 .......................................... 80 4.5 布の一枚分離動作 .................................................. 82 4.6 布の一枚分離実験 .................................................. 86 4.7 布めくりの挙動観察 ................................................ 87 4.8 しわのできる条件 .................................................. 90 4.9 布めくりのための布を押し始める場所に関して ........................ 93 4.10 布特性としわ ..................................................... 97 4.11 まとめ ........................................................... 97
5 視触覚を用いた布の平面展開 99 5.1 緒言 .............................................................. 99 5.2 様々な折れ重なった布の展開法 ...................................... 99 5.3 輪郭情報を利用した部分パターンマッチング .......................... 101 5.3.1 ハンドリングによる布の展開 .................................... 101
5.3.2 輪郭情報を利用した柔軟物の部分パターンマッチングと
エッジコーナ点推定 ............................................ 101 5.3.3 試行的ピックアップ動作 ........................................ 104 5.4 2本指ハンドによる布の展開実験 .................................... 105 5.4.1 柔軟物ハンドリングのプロトタイプシステム ...................... 105 5.4.2 布の展開実験 .................................................. 106 5.4.3 布の展開実験結果 .............................................. 107 5.5 触覚による折れ重なっている布のエッジの高低測定手順と結果 .......... 112 5.6 まとめ ............................................................ 115
6 結論 116
謝辞 119
参考文献 120
付録 124 付録1 多角形の輪郭情報 ............................................... 124 付録2 日本標準産業分類 分類項目表..................................... 125 付録3 2本指ロボットハンド組み立て図面 ............................... 129 付録4 3本指ロボットハンド組み立て図面 ............................... 131
図目次
Fig.1-1 製造業,繊維工業の推移 ........................................ 4 Fig.1-2 柔軟なハンドリング対象物 ........................................ 5 Fig.1-3 布の変形特性 ................................................... 6 Fig.1-4 布の伸びの特徴 ................................................. 7 Fig.1-5 持ち上げた際の布の形状の違い .................................... 8
Fig.2-1 縫製作業の流れ,左から前動作,主動作,後動作.................... 11 Fig.2-2 生地の搬送システム .............................................. 12 Fig.2-3 自動プレス機 ................................................... 13 Fig.2-4 効率化が進んでいる縫製作業場 ................................... 14 Fig.2-5 ビジュアルフィードバックで生地操作 ............................. 16 Fig.2-6 ECS (Edge Control Seamer) ..................................... 17 Fig.2-7 生地の1枚分離の手法 ........................................... 18 Fig.2-8 針刺しタイプ ITV Denkendorf 西独 .............................. 19 Fig.2-9 自動縫製システムの研究開発で試作された把持モジュール 日本 ...... 19 Fig.2-10 空気利用タイプ ................................................ 21 Fig.2-11 粘着タイプ .................................................... 21 Fig.2-12 静電気タイプ .................................................. 22 Fig.2-13 凍結解凍タイプ ............................................... 22 Fig.2-14 ひだタイプ .................................................... 23 Fig.2-15 生地操作 ...................................................... 24 Fig.2-16 自動縫製システムプロジェクトの実験プラントにおける
生地ハンドリング,日本 ........................................ 25 Fig.2-17 CG による布形状の動的な表示 .................................... 27 Fig.2-18 アパレル CAD ................................................... 27
Fig.3-1 1枚の生地を保持したときの姿勢 ................................. 32 Fig.3-2 実験システムの概略図 ........................................... 33 Fig.3-3 試作したハンド ................................................. 33 Fig.3-4 試作したハンドの概略図 ......................................... 34 Fig.3-5 試作したハンドの関節の回転範囲 ................................. 34 Fig.3-6 試料の圧縮特性 ................................................. 35 Fig.3-7 実験テーブル ................................................... 37
Fig.3-8 指に装着されたひずみゲージの信号 ............................... 38 Fig.3-9 歪ゲージの信号出力と試料の厚さの関係 ........................... 39 Fig.3-10 歪ゲージを装着した円弧状の指バネモデル ........................ 41 Fig.3-11 円弧長一定でφ θ0を 0.1 から 0.9 まで変化させたときの
ε d
と円弧角θ0 の関係円弧長が,Rθ0=40×π2のとき。C 点は,試作した指の設計値を入れて計算した結果。 ........................ 44 Fig.3-12 生地を1枚分離する動作 ........................................ 45 Fig.3-13 生地上面を押したときの生地端の形 .............................. 46 Fig.3-14 生地を1枚分離して持ちあげる動作 .............................. 47 Fig.3-15 生地の1枚分離操作を行う際のロボットの指の動きのシミュレーション 48 Fig.3-16 ナイフメッシュ裁断機と裁断生地 ................................ 53 Fig.3-17 ナイフメッシュ裁断された生地のエッジの丸み .................... 53 Fig.3-18 曲面を有する生地の1枚分離方法 ................................ 54 Fig.3-19 ナイフメッシュ裁断生地の形状測定 .............................. 55 Fig.3-20 計算機で推測した曲面形状(計算機のモニター画面) .............. 56 Fig.3-21 曲面形状の推測後に表示される画面 .............................. 56 Fig.3-22 ナイフメッシュ裁断された生地の1枚分離動作 .................... 57 Fig.3-23 壁にポスターを押し付ける動作 .................................. 59 Fig.3-24 生地の端をずらさずに置く動作 .................................. 59 Fig.3-25 布生地を広げる冶具 ............................................ 60 Fig.3-26 生地の1枚分離,ピックアップ,移送,設置の一連の動作 .......... 61 Fig.3-27 生地を斜面に置く実験装置 ...................................... 62 Fig.3-28 ガラスの斜面のカメラ .......................................... 62 Fig.3-29 ガラスの斜面の裏のカメラ映像 .................................. 62 Fig.3-30 積層された生地を1枚分離し,45 度の斜面にその生地をおく連続動作.. 63 Fig.3-31 本手法による生地のピックアップアンドプレイス機能を実現する機構例 64 Fig.3-32 ロボットハンドによる張力制御する場合の把持の仕方 .............. 65 Fig.3-33 張力制御実験システム .......................................... 66 Fig.3-34 実験システムのブロック図 ...................................... 68 Fig.3-35 歪ゲージ信号と力及び歪信号とフォースゲージの移動量 ............ 69 Fig.3-36 ロボットアームの動きによる張力制御 ............................ 69 Fig.3-37 ロボットアームとロボットハンドの協調による張力制御 ............ 70
Fig.4-1 ロボットハンドの大きさ ......................................... 73 Fig.4-2 ロボットハンドのデザインとその自由度 ........................... 74 Fig.4-3 掌を有する3本指ロボットハンド ................................. 75
Fig.4-4 2本指ロボットハンド ........................................... 76 Fig.4-5 布押さえ ....................................................... 76 Fig.4-6 しわを拡げる ................................................... 77 Fig.4-7 布の把持 ....................................................... 77 Fig.4-8 布を折り返す ................................................... 78 Fig.4-9 掌で布を押さえながら布をつまむ ................................. 78 Fig.4-10 教示機能付きの3次元シミュレータのモニター画面 ................ 79 Fig.4-11 可動範囲を表示できる教示機能付きのシミュレータ ................ 80 Fig.4-12 資料の表面 .................................................... 80 Fig.4-13 布同士の摩擦係数 .............................................. 81 Fig.4-14 Stuart の水平ループ法 ........................................ 81 Fig.4-15 第2指と掌で挟む動作 .......................................... 83 Fig.4-16 第1指と第2指で挟む動作 ...................................... 83 Fig.4-17 荷重測定装置 .................................................. 84 Fig.4-18 ポリエステルの布を摘み上げているときの鉛直成分の加重 .......... 86 Fig.4-19 布把持した際の布の形状 ........................................ 87 Fig.4-20 積層された布を押したときにできるしわの高さ .................... 88 Fig.4-21 積層された布を押したときにできるしわの高さ .................... 88 Fig.4-22 積層された布を押している断面のイメージ図 ...................... 88 Fig.4-23 テーブル上に置いた布の表面を擦ったときの挙動 .................. 89 Fig.4-24 しわのできる現象 .............................................. 90 Fig.4-25 布を押し始める場所としわのできかた ............................ 93 Fig.4-26 押すべき場所でない箇所 ........................................ 94 Fig.4-27 曲げ長さのカンチレバーテスト .................................. 95 Fig.4-28 布の圧縮特性 .................................................. 96 Fig.4-29 曲げ長さの異なる布 ............................................ 96
Fig.5-1 布の平面展開方法 ............................................... 100 Fig.5-2 部分パターンマッチングのための輪郭パターンとその情報の例 ....... 102 Fig.5-3 部分パターンマッチングのデータ処理のイメージ ................... 102 Fig.5-4 推定された折れ重なるエッジコーナー点 d" .........................104 Fig.5-5 折れ曲がった部分を展開ミスする例 ...............................105 Fig.5-6 布ハンドリングシステムの概要図 ..................................106 Fig.5-7 2本指ロボットハンド ........................................... 106 Fig.5-8 布を平面展開する際の軌道 ....................................... 107 Fig.5-9 カメラに入力された生画像 ....................................... 108
Fig.5-10 輪郭抽出した結果と折れ曲がり部の頂点の推測位置 ................ 109 Fig.5-11 布の展開動作の流れ ............................................ 110 Fig.5-12 多角形の場合の折れ曲がり部展開 ................................ 112 Fig.5-13 布の高さの違いの検知 .......................................... 113 Fig.5-14 ロボットハンドで布表面を触ったときに得られた布の高さ .......... 113 Fig.5-15 表折れの区別 .................................................. 114
Fig.A-1 一回目の直線近似 いくつかの辺は複数の直線からなる。 ........... 125
表目次
Table 1-1 生地の特性 ................................................... 7
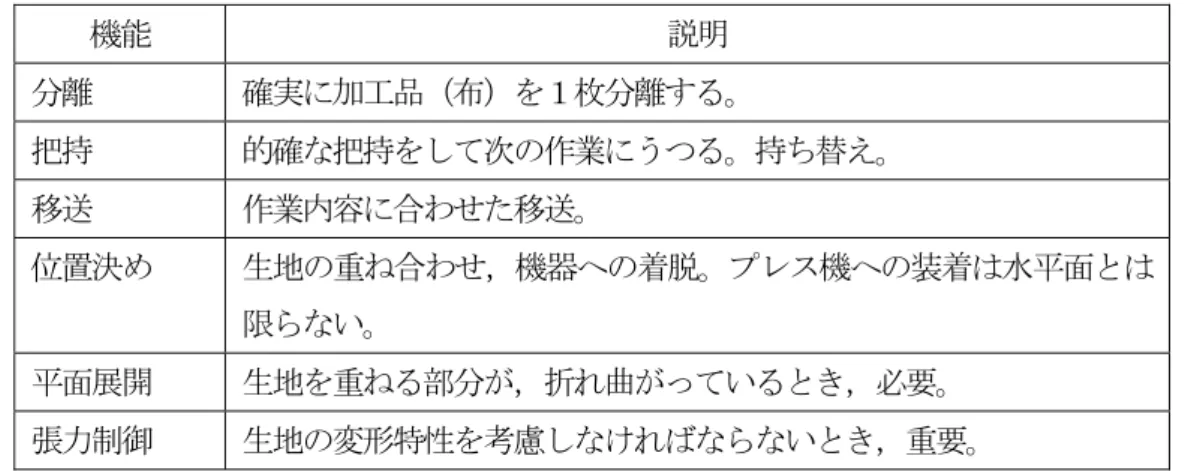
Table 2-1 縫製作業 ..................................................... 11 Table 2-2 縫製作業における布のハンドリングに必要な機能 ................. 15 Table 2-3 ロボットハンドと従来のピックアップデバイスとの比較 ........... 29
Table 3-1 各試料1枚,2 枚重ね,3 枚重ねの厚さ[×10-2cm] ............... 36 Table 3-2 各試料の素材,織り方,重さ ................................... 36 Table 3-3 50 回の繰り返し把持実験の際の把持時の平均歪ゲージ信号出力
および1枚把持をしたときに0枚把持より増加した歪量 ........... 40 Table 3-4 素材,織組織,重さ,厚さ,曲げ剛性 ........................... 49 Table 3-5 生地の見かけの厚さ[×10-2cm]の測定結果 ...................... 50 Table 3-6 ロボットハンドによる生地の1枚分離実験の結果 ................. 50 Table 3-7 コンピュータシミュレーションによる指先位置の微調整の有無の
違いによる1枚分離実験結果(試料 No.246 の場合) .............. 51 Table 3-8 生地の特性 ................................................... 51 Table 3-9 自動調整機能のプログラムを利用した1枚分離実験結果 ........... 51 Table 3-10 生地の特性と1枚分離実験結果 ................................ 58 Table 3-11 生地の特性 .................................................. 60 Table 3-12 取上げた生地を角度 45 度の斜面に置くときの生地の滑り移動量と
位置の再現性 ................................................ 63 Table 3-13 生地の特性 .................................................. 69
Table 4-1 生地特性(曲げ長さは Stuart の水平ループ法で測定[9] ) .......... 81 Table 4-2 1枚分離実験を30回繰り返した結果(成功回数).................. 86
第1章 序論
1.1 ロボットによる柔軟物のハンドリングの必要性
ロボットによるハンドリングは,対象物に剛体を扱うものが多い。産業界において柔らか くフレキシブルな対象物は多々あるが,工程全般にわたり柔軟物がロボットによってハンド リングされている例は少ない。自動化された組み立て・加工機器が利用されていても,それ ら機器へのピックアンドプレイス(対象物を取り上げて所定の位置に置くこと)は,人手に 頼っている場合が多い。ハンドリング専用機器は,大量生産する下着,紙製品(ティッシュ ペーパー,たばこなど)を作るシステムに組み込んだ例がある。日常生活においても多くの 柔らかい物があり,それらを効果的に確実に扱うことが生活を支援するロボットにとって必 要となる。人間型ロボットに代表される家庭ロボット等の研究開発が盛んに行われているが,
それらが真に役に立つためには柔軟物のハンドリングは避けて通れない。
身の回りの柔軟物の典型として衣類があげられる。先進国の縫製業界では人手不足を補う ため30年以上前から縫製機器や搬送機器の自動化が進められてきているが,薄くて柔らか くフレキシブルで3次元状に変形する布をロボットでハンドリングすることはほとんど実現 できていない。布状の対象物をロボットがハンドリングできるようになると,縫製業界のみ でなく,変形しやすいシート状の対象物や繊維製品を扱う産業(自動車のシートや飛行機な どのシート状カーボン繊維,リネンサプライのタオル・シーツ・浴衣,アパレル産業の衣料,
土木関係のジオテキスタイル,折りたたむ携帯電話などのフレキシブル基板など)での作業 自動化や,医療福祉関連環境・日常生活環境(包帯を巻く,ベッドメイキング,オムツ交換,
衣類着脱,衣類をたたむ)での将来のサービスロボットの幅広い活用につながる。
柔らかい物をハンドリングするという技術に関し,産業界からロボット活用の可能性が期 待されている。日本の縫製業界では,工業生産が活況を呈し高度成長期に入った1965年頃 から,人手不足を補うため,縫製自動化の開発が始まった。1965年-1975 年間に縫製業界 の事業所数,従業員数は共に約 70%増加している[1]Fig.1-1。当時ヨーロッパではすでに 日本より先に自動化研究が始まっていた。通産省の主導したミシン産業政策では1971年メ カトロニクス(自動糸切り化),1977年マイコン装備(NC自動縫い化),1984年マシン・マ イコン・ロボット融合(縫製FA化)が目指された[2]。1980年代に日本と欧米で低価格商 品対抗のため生産能力向上と総経費削減のための研究が進められた。そのため主な技術的課 題は,多様化,短サイクル化に対応した高付加価値のアパレル(衣料品)生産の近代化,合 理化が主に追及された。その究極は生産ラインの無人化である。この目標を最も早く明確に して取り組んだのは日本であった[3]。1982年度から9年間,3国立研究所,28企業参加
による通産省大型プロジェクト「自動縫製システムの研究開発」が実施された[4]。そのプ ロジェクトの中で布ハンドリング用ロボットハンドの研究に著者は参画し,そのことが本論 文の研究の契機となった。自動縫製システムの実験プラントでは,それ以前のプロジェクト
「パーツ縫製のマテハンシステム化技術開発」(1975-1979)で開発された針布法(23ページ)
によるデバイス[5]を軽量コンパクトにし,それらを複数利用して任意の形の平面生地を 把持する装置をロボットアームに装着した。現在,ヨーロッパで,2001年から自動縫製シス テム関連のLeapfrogイニシャチブが進行中で,シート状の布をハンドリングするロボットが 研究されているLeapfrog Integrated Project(2005-2009)では,2007年以後にロボットによる 研究を予定している[6]。
縫製業界以外の柔軟物ハンドリング作業では,1990年前後頃より人手不足や生産性向上の 理由で,リネンサプライ(ホテル・レストラン・病院・福祉施設のシーツ,タオル,浴衣な どをクリーニングしレンタルする)業界や自動車の内装業務で布のハンドリングの自動化に 関心が高くなった。また,2000年の東アジア,ASEAN,中国,タイから日本への自動車 部品輸入額の上位1位の品目は労働集約的部品であるワイヤーハーネスなどの配線セット である[7]。カーエレトロニクス化が進展し,情報とエネルギー伝送のため一台の高級車に 電線が1000本程度,総延長1000m以上使われている。ワイヤーハーネス配線作業の自動化 を目指した基礎研究[8],NEDO戦略的先端ロボット要素技術開発プロジェクト(2006~2010)
で「柔軟物も取り扱える生産用ロボットシステム」で2件は自動車などのワイヤーハーネス 配線作業の一部を,1件は柔軟物の組み付け制御の開発を想定した研究がある [9]。
0 25 50 75 100 125 150 175 200
1965 1970 1975 1980 1985 1990 1995 2000
事 業 所 数 [ 千
]
年 0 100 200 300 400 500 600 700 800 製
造 業 計 [ 千
]
14 繊維工業(衣服・その他の繊維製品製造業を除く)
15 衣服・その他の繊維製品製造業 29 一般機械器具製造業(33 武器含)
30 電気機械器具製造業
31 輸送用機械器具製造業(自動車、鉄道、船舶、飛行機など)
00 製造業計(12食料品製造業から34その他の製造業までの総計)
Fig.1-1 (a) 製造業の事業所数
0 5 10 15 20 25 30
1965 1970 1975 1980 1985 1990 1995 2000
従 業 員 数[ 十 万 人 ]
0 20 40 60 80 100 120 製
造 業 計[ 十 万 人 ]
14 繊維工業(衣服・その他の繊維製品製造業を除く)
15 衣服・その他の繊維製品製造業 29 一般機械器具製造業(33 武器含)
30 電気機械器具製造業
31 輸送用機械器具製造業(自動車、鉄道、船舶、飛行機など)
00 製造業計(12食料品製造業から34その他の製造業までの総計)
年
Fig.1-1 (b) 製造業の従業員数
0 20 40 60 80 100 120 140 160 180
1965 1970 1975 1980 1985 1990 1995 2000 事
業 所 数[ 千]
年 0%
5%
10%
15%
20%
25%
繊維工業 対全製造業比率
Fig.1-1 (c) 繊維工業の事業所数推移と対全製造業比率の推移
0 2 4 6 8 10 12 14 16 18
1965 1970 1975 1980 1985 1990 1995 2000 従
業 員 数[ 十 万]
0%
2%
4%
6%
8%
10%
12%
14%
16%
18%
繊維工業 対全製造業比率
年
Fig.1-1 (d) 繊維工業における従業員数の推移と対全製造業比率の推移
Fig.1-1 製造業,繊維工業の推移
衣服・その他の繊維製品製造業が主に縫製業界であり,事業所数,従業員数とも1965年から1975 年間に70%増えている[1]。分類は日本標準分類[付録2]による。
1.2 布の特徴及び特性とハンドリングする上で留意すべき事項
柔軟物の一般的な特徴は,材料の伸び縮みがあり容易に変形することと材料の曲げ変形が 容易なことであるが,必ずしも両方の特性を有してはいない。ゴムひもは,伸び,曲げ変形 が容易であるが,ビニールひもは,曲げ変形が容易だがあまり伸び変形はない。ハンドリン グ時に配慮する点として素材により弾力性(回復性),塑性変形後の形態安定性,異方向性,
ヒステリシス特性,摩擦特性などが影響を及ぼすものと思われる。“柔軟”といっても,どれ くらい柔らかいと柔軟で,どこからが柔軟でないとの区別はあいまいである。剛体であって も,多関節でくねくね動くような,例えば,腕時計の金属でできたリストバンドなどは,全 体の形がある制限内では自在に変わることができる。“柔軟物”を,「ハンドリングの対象物 として観たとき,ハンドリング時に形が変形する又は変形しやすい対象物」という観点で分 類すると素材の変形のみでなく構造的な変形も含まれる。以上のようなことを配慮し,人間 の感覚でみて明らかに形が変わる物を柔軟なハンドリング対象物とし,どのような対象物が あり,どのよう作業があてはまるか,その具体例を産業,生活の中で考え,対象物の一部を Fig.1-2に示し,形の特徴から以下の3つに分類した。
なお,布生地または生地は布製品を作る材料としての2次元状の素材の布を意味する。
伸び又は縮み変形 曲げ変形
構造的変形
弾性的変形
塑性的変形 ミミズ
クサリ 尺取虫
うなぎ ヘビ イカ
タコ 太い電線
ソーセージ
ネクタイ 麺類
こんにゃく パン
紙
ビニールシート 布生地
豆腐
スポンジゼリー
チーズ
粘土
アメフラシ
スライスチーズ
細い電線 ゴムひも
繊維
ビニールひも ベルト
ロープ
クラゲ 毛布 網
寝具
毛・獣毛 布生地
伸び又は縮み変形 曲げ変形
構造的変形
弾性的変形
塑性的変形 ミミズ
クサリ 尺取虫
うなぎ ヘビ イカ
タコ 太い電線
ソーセージ
ネクタイ 麺類
こんにゃく パン
紙
ビニールシート 布生地
豆腐
スポンジゼリー
チーズ
粘土
アメフラシ
スライスチーズ
細い電線 ゴムひも
繊維
ビニールひも ベルト
ロープ
クラゲ 毛布 網
寝具
毛・獣毛 布生地
Fig.1-2 柔軟なハンドリング対象物
「柔軟」の意味に,ソフトであることとフレキシブルであることの意味が含まれており,変形の 仕方には構造的な変形も含まれる。図の布生地は,布製品を作る材料としての2次元状の素材の 布を意味する。
1:塊状(3次元的形状)
対象物:こんにゃく,パン,ゼリー,型のしっかりしたスーツ類,人間 作業:食料品のハンドリング,人間との接触
主な把持法:支える,握る,挟む
2:面状(2次元的形状,Limp Materials,薄くて変形しやすい物)
対象物:布生地,紙,ピニールシート,網
作業:車などの内装,リネンサプライ,縫製作業でハンドリング,着替え,包む 主な把持法:支える,挟む,絞るようなとき握る
3:ひも状(1次元的形状)
対象物:糸,ひも,リボン,ロープ,電線,クサリ 作業:配線のハンドリング,結ぶ
主な把持法:挟む,握る
身近で柔軟なハンドリング対象物で塊状の対象物は,人間を除くとあまり大きなものは見 当たらず,集中荷重を与えないように形状に沿って握るか,支えるように把持するものが多 い。面状の対象物は,ネクタイのように幅のせまい物からタオル,風呂敷,シーツのように
大きな物まである。ひも状の対象物は細長い。3次元的に大きく形状が変形しやすい対象物 として布や紙があげられる。紙は型(平面にした際の形)の変形が一般的にほとんどないが,
布は変形しやすい。布を任意にハンドリングできれば,多くの柔軟な対象物をハンドリング できる可能性が高い。以下に布の特徴や特性について述べる。
布は,織物,編物,不織布に大きく分けられる。織物,編物は,まず綿(太さ約15-24μm,
20-25mm),麻(亜麻の太さ約15-19μm,長さ20-30mm),絹(太さ約10μm,1200-1500m), ウール(メリノ種で太さ12-25μm,長さ70-100mm)などの天然繊維や化学繊維からなる集 合体を撚り糸状にし,それらを製布してシート状にしたもので,目的に応じて様々な加工・
処理が施される。不織布は,繊維のままでシート状に加工したもので様々な製法がある。そ のため,布の特性は,繊維素材,糸の構成法,シートの製布(織り方など),加工法によっ て異なり,伸縮,せん断,曲げ,圧縮の材料力学的特性は一般に非線形特性,異方向性[10]
(Fig.1-3)を有するものが多い。
Fig.1-3 (a) 布の伸びと張力の関係。布の力学 特性は,一般にヒステリシス,非線形である。
(布地A:ポリエステル65%,綿35%平織り,
布地B:毛100% 梨地織)
Fig.1-3 (b) 各種織物の曲げ剛さの方向性ブ ロードはタテ糸の密度が高い平織り。2/2斜 紋は,タテ糸/ヨコ糸を表し,タテ糸がヨコ 糸の上を2本乗っては2本沈む織り方を表す。
他に2/1,1/2などある。フラットクレープは 柔らかい平織の1種。[10]
Fig.1-3 布の変形特性
さらに布以外のシートやフィルム状物体と異なる特徴は,材料自身の変形のみでなく構造 的な変形が大きいことである。紙はガウスの曲率が零の曲面(円筒や円錐)を覆うことがで きるが,布はさらに人体の凸凹状(ガウスの曲率が零でない曲面,腹,胸など)の3次元状 の曲面も覆うことができる。経糸(たていと),緯糸(よこいと)方向にハンカチを引っ張 ると若干伸び具合が異なり,緯糸方向の方が伸びる。さらに斜めに引っ張ると織物が構造的 に変形し,伸ばした方向に平行に大きな皺が寄って膨らみ,布の形が大変形する(Fig.1-4)。
この性質を利用したのがネクタイの生地などで,布を斜め方向に裁断(バイアスカット)
して作製されている。このおかげでネクタイを締めると布の組織が構造的に変形し膨らみが でき,ほどくともとに戻りやすいので折れて皺がつくネクタイはほとんどない。
経方向(縦糸の伸び) 緯方向(緯糸の伸び)斜め方向(構造的変形)
経糸
緯糸 経方向(縦糸の伸び) 緯方向(緯糸の伸び)斜め方向(構造的変形)
経糸 緯糸
Fig.1-4 布の伸びの特徴 通常,異方向性がある。
生地によっては,裁断後の形状安定のため,裁断前に緯糸(よこいと)の乱れを直したり,
適当な熱,湿度をかけて生地を縮めるなどの処理をする。また温湿度が変わると糸が伸縮し て布形状が変形する種類,強度が大きく変化する種類もある。Table1-1に様々な布の特性の 項目を示す。
Table 1-1 生地の特性
特性 項目
変形特性 伸縮,圧縮,曲げ,せん断,ねじり,摩耗
機械的強度特性 引張強度,破裂強度,引裂強度,摩耗強度,耐疲労性 形態安定性 伸縮性,しわ
外観特性 ドレープ(自然に布を垂下させたときの状態)性,光沢 保健衛生的特性 通気性,保温性,吸水性,帯電性
以上より,剛体のハンドリングと比較し布のハンドリングにおける異なる困難さとして,
(1)形や状態がハンドリングで容易に変化し,折れ曲がりやすい。
(2) 同じ対象物でも様々な状態を取り得り,特性の変化の幅が大きく,一般に非線形・
異方向性がある。厚さが紙のように一様でない。生乾きと乾いた状態では,力学 的特性が異なる。
(3)素材により温湿度の影響を大きく受ける。伸びちぢみがある。
などがある。このためリアルタイムに特性・形状を予測することが現状では困難である。
ロボットや自動化機器による柔軟物のハンドリングでは,剛体のハンドリングと比較して 以下の点(1)~(5)を留意することが望ましいと思われる。
(1)1つの動作で2つの事をする。
柔軟物体の取り扱い動作は,剛体と比較し把持姿勢の修正などの動作が増えやすい。その ため,“1度でふたつ以上の意味を持つ動作”,または“持ち替え動作がなるべく少ない動作” にてハンドリングを行う方が望ましい。
セーターの着脱を例にとると,セーターを着る時に頭を先に通す人は,まずセーターの腰 の部分を把持してたぐり輪を作り,手を先に通す人は,一方の手を通す時に他方の手でセー ターの肩の近くを把持する。この動作は,「取り上げる動作」と「衣服を着る開始動作」を 同時に行うことにより衣服の持ち替え回数を減らしている。すなわち1つの動作で2つの事 をしている。
(2)把持位置は,対象の形態変形を十分考慮して決定する。
四角い布の一辺の中央を把持して,持ち上げると布の形が把持した部分を中心に逆V字 形(把持した部分が凸の始まりの山が1つある形)またはM字形(把持した部分が凹の始ま りで,把持した部分を中心に左右に山が2つある形 Fig.1-5 の(a))の対称的な形になる。し かし,その布を中央部分から少しずれた箇所で把持すると,たいてい非対称的な逆V字形に
なる[Fig.1-5の(b)]。どちらの形になるかは持ち上げ方,把持量,布の特性および状態(布
によっては湿度など環境の影響を大きく受ける)の微妙な違いで異なる。したがって,布の 状態を想定したハンドリング操作をスムーズに行うためには把持位置に対し十分な考慮が 必要である。
(a) 布の下端がM字型 (b) 布の下端が逆V字型 Fig.1-5 持ち上げた際の布の形状の違い
(a)は布形状がM字型で山2つ,(b)が逆V字型で山が1つ。布の形状,布の取り上げ方が同じ動 作でも,布の状態が毎回微妙に違い,持ち上げたときの布の形状は同じとは限らない。
(3)最初から試行的探索,エラーリカバリーの要素を基本的に含んだハンドリング動作計 画が必要である。
織物,編物は金属材料と異なり,一般に非線形,ヒステリシス,異方性の特性を有する。
厚さは布を押す圧力によって異なり,同じ布でも厚さにバラツキがあることもある。積層さ れた布の高さは,紙と異なり単純にその布の枚数に比例するとは限らない。素材である繊維,
糸の伸び,曲げ,捻りによる変形だけでなく,織り方,編み方に関わる構造的な変形が可能 である。例えば,縦,横方向にほとんど伸び変形しない素材の平織りの布でも,斜め方向に 引張ると大変形する。
柔軟物体は重力場で容易に変形するが,布などは上記の理由により正確な形状予測は困難 である。さらに3次元状の変形は摩擦や環境条件(湿度など)の要因も大きいので試行的な ハンドリング動作が必要である。
(4)センサ情報の時間的変化をすみやかに取り入れる。
ハンドリング操作中の柔軟物体の形状は,初期条件,ハンドリング動作により大きく変化 することがある。ロボットが同じ動作をしても布特性や布の状態(それ以前の布の履歴,形 状,温湿度環境など)により布の挙動が異なり,布の位置が変わったり,折れたりすること もある。布を1枚移送中にその移送動作パターンによって布の形がM字形から逆V字形に変 わることもある。したがって作業によっては対象物の変化に柔軟に対応する必要があるため,
対象物の変形をなるべくすみやかに感知する必要がある。
(5)視触覚の協調センシングを行う。
柔軟物体は容易に変形するので,そのハンドリングに必要な視覚と触覚の情報を得やすい ように相補的に活用する協調センシングの必要性が高いと思われる。
すなわち「視覚情報と触覚情報を統合的に利用」や,「互いの他の情報の積極的な活用」
や,「同時性を有する視触覚情報の活用」がより良い情報を得るために有力であり,これに よりハンドリングの汎用性が向上すると思われる。
例えば,布の把持位置を探す際に,手探りのみより目を使って見た方がより広範囲に探す 場合の効率は良い。また一方,柔らかさ,つるつるなどの触感覚や重さ,重心の位置は視覚 情報では不明確で,触れてからより良い把持の仕方を検討した方が良い場合もある。さらに 視覚情報が得やすいように布の位置姿勢を変えたり,触覚情報を得る場所を選びやすいよう に視覚センサの位置姿勢を変えるなどの補助動作を行うことは,より高品位な情報の取得可 能性を増す。
柔軟対象物のハンドリングにおいて,従来のモデルベーストな制御や動作計画よりはセ ンサベーストな制御・動作計画の割合が大きくなり,作業のフレキシビリティを上げるため にも協調的なセンシングが重要な役割を果たすと思われる。
1.3 研究の目的と論文構成
本研究の目的は,布のハンドリング作業における人間の手の機能(生地分離,生地把持,
移動,位置決め等)の自動化を目指し,生地を取り扱う技術及びその関連システムの開発を 行うことにある。この目的のために,対象物の状態を観察するためのセンシング機能と,柔 軟物を繊細かつ多様に扱うことの出来る指構造を有する生地ハンドリング用ロボットハン ドを開発し,生地の一枚分離,移送,あてがい定置などキーとなる動作の実現を図る。
提案する生地ハンドリング法に関し,実験を行いその有効性を確認し評価する。また,布 の一枚分離に関しては,実験及び理論の観点から成功のための条件について考察し,経験則 としての基準を与える。
論文の構成は以下のとおりである。
第1章は「序章」であり,ロボットによる柔軟物ハンドリングの必要性,対象物の特性及び ハンドリングする上で留意すべき事項を述べ,そして本研究の目的と論文の構成について述 べる。第2章で,縫製業界を例に布のハンドリング作業と従来の研究,基礎的な課題を3つ 挙げ,ロボットハンドと従来の手法の比較を行う。それら3つの課題に関して3章以下にロ ボットハンドにより提案,実現した結果を述べる。第3章では,ピックアンドプレイスに特 化して試作した触覚センサを有する2本指ロボットハンドについて述べる。従来困難とされ た積層された布の1枚分離やピックアップした布を任意の位置におく手法などについて提 案し実験結果を述べる。第4章で,より多機能性を目指して試作した3本指ハンドを用いて 積層された布の1枚分離の手法と実験結果,および布を1枚分離する際のピックアップしや すい条件について考察を行った結果を述べる。第5章で,視覚と触覚を用いて,折れ曲がっ た布を平面展開する手法について述べる。第6章で,各章のとりまとめと今後の課題を結言と して述べる。

![Table 3-5 生地の見かけの厚さ[ ×10 -2 cm ]の測定結果 1 ~ 10 枚目 11 ~ 20 枚目 21 ~ 30 枚目 31 ~ 40 枚目 41 ~ 50 枚目試料No](https://thumb-ap.123doks.com/thumbv2/123deta/7736221.1711823/66.892.133.760.167.346/Table生地見かけ厚さ×測定結果~枚目~枚目~枚目~枚目.webp)
![Table 4-1 生地特性(曲げ長さは Stuart の水平ループ法で測定 [9] ) 素材 重量 [mg/cm 2 ] 見かけの厚さ [mm] 曲げ長さ [cm] 経(たて)緯(よこ) ウール 22.64 1.23 19.5 20.0 ポリエステル 5.75 0.37 16.8 14.4 Fig.4-13 布同士の摩擦係数 布同士の摩擦係数は,擦りあわせる面と擦る方向および荷重によって異なる。 P1, P2, P3 は,2 枚のポリエステルの布をそれぞれ](https://thumb-ap.123doks.com/thumbv2/123deta/7736221.1711823/97.892.123.684.143.666/曲げ長さ曲げ長さポリエステルあわせるによってポリエステル.webp)
