論 文
無人飛行体による災害復旧ネットワークにおける 正規化相互相関を用いた複数メッセージ収集点決定法
檀上 梓紗
†a)原 晋介
†b)松田 崇弘
††c)小野 文枝
†††d)A Multiple Data Collection Points Selection Method
Using a Normalized Crosscorrelation in a UAV Enabled Disaster Recovery Network
Azusa DANJO
†a), Shinsuke HARA
†b), Takahiro MATSUDA
††c), and Fumie ONO
†††d)あらまし 大規模災害が発生し,多くの人々が避難所での生活を余儀なくされた場合,避難者の安否確認のた めに,災害発生後すぐに構築できる代替の情報ネットワークが必要不可欠となる.無人飛行体(UAV: Unmanned
Aerial Vehicle)を利用することにより,安否確認メッセージをワイヤレスに収集できるが,避難所は同一地域に多
数指定されており,効率的にメッセージを収集できる複数の地点を決定する必要がある.そこで,本論文では受 信信号強度(RSS: Received Signal Strength)の正規化相互相関を利用した複数収集点決定法を提案する.また,実 験値による性能評価を行い,経路長及びデータ収集時間の観点での提案法の有用性を示す.更に,計算回数にお いても有利であることを示す.
キーワード 無人飛行体,災害復旧ネットワーク,受信信号強度,正規化相互相関
1.
ま え が き2011
年に発生した東日本大震災では,電力,ガス,水道や道路などのライフラインやインフラの壊滅的な 被害により約
47
万人が避難者となっている[1]
.また,情報ネットワークに注目すると,地上の情報通信ネッ トワークの完全復旧には約
1
か月かかっている[2]
.こ のように,大規模災害が発生した場合,多くの人々が 避難所での生活を余儀なくされ,地上の情報通信イン フラは長期的に遮断される可能性が今後も高いことを 考えると,避難者の安否確認のために,災害発生後す†大阪市立大学大学院工学研究科,大阪市
Graduate School of Engineering, Osaka City University, 3–3–138 Sugimoto, Sumiyoshi-ku, Osaka-shi, 558–8585 Japan
††東京都立大学大学院システムデザイン研究科,日野市
Graduate School of Systems Design, Tokyo Metropolitan University, 6–6 Asahigaoka, Hino-shi, 191–0065 Japan
†††情報通信研究機構ワイヤレスネットワーク総合研究センター,横浜 市
Wireless Networks Research Center, National Institute of Information and Com- munications Technology, 3–4 Hikarino Oka, Yokosuka-shi, 239–0847 Japan a) E-mail: [email protected]
b) E-mail: [email protected] c) E-mail: [email protected] d) E-mail: [email protected]
DOI:10.14923/transcomj.2020GWP0007
ぐに構築できる代替の情報ネットワークを準備してお くことが必要不可欠となる.
一方,我が国では,内閣府が
2016
年から小型の無人 飛行体(UAV: Unmanned Aerial Vehicle)
に対してロー ドマップを策定しており,最新の改定によると,2022
年度以降に目視外・有人地帯での飛行(レベル4
)が 許可される見込みである[3]
.UAV
は,道路が遮断さ れている場合でも被災地まで到達することが可能であ り,また,避難所に避難者からの安否確認メッセージ を蓄積するためのサーバと無線機を設置している自治 体もある[4]
.これらのことを考慮に入れると,無線通 信機器を搭載したUAV
が拠点から避難所まで飛行し 上空でホバリングしながら安否確認メッセージを収集 するような臨時の情報通信ネットワークが大いに期待 できる[5]
.UAV
が拠点を出発し,複数の避難所を巡りながら安 否確認メッセージを収集する場合の問題として,UAV
の飛行時間が短く,現状で20–40
分に制限されている ことが考えられる[6]
.限られた時間で安否確認メッ セージを効率良く収集するためには,拠点から避難所 への移動及び安否確認メッセージ収集の二つの側面か ら問題解決にあたらなければならない.電子情報通信学会論文誌 ©一般社団法人電子情報通信学会
自動車を利用する場合のように,避難所でメッセー ジを収集する位置が道路上に限定されている場合は,
運搬経路問題
(VRP: Vehicle Routing Problem) [7]
を解 くことにより,最適なメッセージ収集経路は決定でき る.しかしながら,無線を使ってUAV
でメッセージ を収集する場合は,避難所でメッセージを収集する 位置は3
次元空間上で自由に決定できるので,メッ セージを効率良く収集できる点をまず決定しておく必 要がある.一般的に,無線品質は受信信号強度(RSS:
Received Signal Strength)
の増加関数であるため,メッ セージを効率良く収集するには,避難所の無線機から の信号に対するRSS
が高い点をメッセージ収集点と して決定し,そこでホバリングしながらメッセージを 収集するべきである.そのメッセージ収集点を決定す る方法として,筆者らはテンソル再構成に基づいた方 法を提案した[8]
.この方法では,メッセージの収集前 に,対象とする領域で無線機からの信号に対するRSS
のセンシングを疎に行い,RSS
マップを3
階テンソル とみなして再構成した後,RSS
が高くなるメッセージ 収集点を決定する.[8]
において,我々は実験結果を用 い,対象領域の25%
でRSS
のセンシングを行うだけ で,複数の無線機からのメッセージを効率良く収集で きる単一のメッセージ収集点を決定できることを示し た.しかしながら,この方法では,送信機数が増加し た場合,それらの信号に対するRSS
が同時に高くな るような単一のメッセージ収集点を選択しても,全て の信号に対してRSS
が十分高くならないので,メッ セージが効率良く収集できなくなる.このような場合 は,RSS
が十分高くなるような複数のメッセージ収集 点を選択するべきである.そこで本論文では,複数のメッセージ収集点を
RSS
マップ間の正規化相互相関を利用して決定する方法を 提案する.複数の送信機に対する複数のメッセージ収 集点の決定問題は,厳密には組合せ最適化問題を解く 必要があり計算回数が莫大となるが,提案法の計算回 数はRSS
センシング点数の線形関数で与えられる.ま た,提案法は従来法である単一メッセージ収集点を選 択する方法[8]
をサブクラスとして含んでいる.以下,2.
では本提案法で用いるモデル及び仮定について説明 し,3.
で問題設定を行う.4.
で提案法を二つ提案し,5.
でその性能評価を行う.
6.
では本論文の結論を示す.2.
モデル及び仮定2. 1
システムモデル無線機を搭載した
UAV
が,複数の避難所に設置さ れているサーバに蓄積された安否確認メッセージを収 集するモデルを想定する.以下では,サーバを送信機 と呼び,安否確認メッセージをデータを呼ぶ.このモ デルはセンシングステージ及びデータ収集ステージで 構成され,センシングステージではUAV
が複数地点 で送信機からの信号のRSS
をセンシングする.また,データ収集ステージでは,センシングステージで得た
RSS
を利用してデータ収集点を決定し,その地点で データ収集を行う.2. 2 UAV
及びレイアウトモデル図
1
はレイアウトモデルであり,ここには3
次元 領域F
,P
台の静止した送信機(TX)
と1
台の飛行す るUAV
がある.F
の大きさはXm × Y m × Zm
であ り,大きさ∆Xm × ∆Ym × ∆Z m
のボクセルで分割さ れている.N
1,N
2 及びN
3をそれぞれx
軸,y
軸及 びz
軸方向の分割数とすると,F
を構成するボクセル 数は合計N
1× N
2× N
3= N
v個となる.ボクセルのラ ベルはl = i + N
1( j − 1 ) + N
1N
2( k − 1 ) (l = 1 , 2 , . . ., N
v, i = 1 , 2, . . . N
1, j = 1, 2, . . . N
2, k = 1, 2, . . . N
3)
とし,l
番目のボクセルの重心をG
l= [ x
i, y
j, z
k]
⊤,その集合を
G = {G
1, G
2, . . ., G
Nv}
と定義する.以下では,ボクセルの重心を単に点と呼ぶ.また,
P
台の送 信機はF
の外側に配置し,p
番目の送信機の位置をS
p= [X
p, Y
p, Z
p]
⊤(p = 1, 2, . . ., P)
とし,その集合を図1 レイアウトモデル Fig. 1 Layout model.
S = { S
1, S
2, . . ., S
P}
と定義する.センシングステージでは,
UAV
はG
からM
個の点 を選択し(M ≤ N
v)
,それぞれの点でP
台の送信機か らの信号に対してRSS
をセンシングする.m
番目の センシング点をU
m(m = 1, 2, . . ., M )
とし,その集合を
U = { U
1, U
2, . . ., U
M}
と定義する.更に,このときのセンシングレートを
B
sense= M / N
vと定義する.なお,ここでいう
RSS
は,送受信機が静止している場 合に,それらの周りの建物分布等の物理的な環境から 決定される距離減衰とシャドウイングによる成分を含 み,時間的な瞬時値変動であるフェージングによる成 分は含まないものとする.一方,データ収集ステージでは,
UAV
はU
からQ
個の点を選択し(Q ≤ M )
,それぞれの点でデータを収 集する.q
番目のデータ収集点をW
q(q = 1, 2, . . ., Q)
とし,その集合をW = { W
1, W
2, . . ., W
Q}
と定義 する.また,W
q でデータ収集が行われる送信機の 集 合 をS
q= {S
q1, S
q2, . . ., S
q Pq}
,S
q の 集 合 族 をSc
= {S
1, S
2, . . ., S
Q}
と定義する.ここで,全ての送信機は重複なくどれかのデータ収集点でデータ収集 されることが必要であるので,直和を
⊕
と表すとS = S
1⊕ S
2⊕ · · · ⊕ S
Q(1)
が成立している.このとき,
W
qでデータ収集が行わ れる送信機の個数をP
q(P
1+ P
2+ · · · + P
Q= P)
と定 義する.更に,UAV
は一定速度v
で移動し,G
aからG
bへの移動にかかる時間をT
f(G
a, G
b)
と定義する.2. 3
無線通信モデルセ ン シ ン グ ス テ ー ジ で ,
p
番 目 の 送 信 機 か ら の 信 号 をU
m で セ ン シ ン グ す る 場 合 ,そ のRSS
をR ( U
m, S
p) dBm
と 定 義 す る .以 下 で は ,R
Sp= {R(U
1, S
p), R(U
2, S
p), . . ., R(U
M, S
p)}
をp
番目の送信 機のRSS
マップと呼び,R
Sp のU
mの要素をR
SpUm
= R(U
m, S
p) (2)
と定義する.特に,
M = N
vの場合を全RSS
マップ,一方,
M < N
vの場合を部分RSS
マップと呼ぶ.なお,U
mでRSS
をセンシングするのに必要な時間をT
s( U
m)
と定義とし,T
s(U
1) = T
s(U
2) = · · · = T
s(U
M) = T
s と仮定する.一方,データ収集ステージで,
p
番目の送信機のデー タをW
qで収集する場合,データ伝送速度はR ( W
q, S
p)
の関数となる.したがって,この関数をf ( R ( W
q, S
p))
とし,そのデータサイズを
D
pbits
と定義すると,デー タ収集に必要な時間はT
c(W
q, S
p) = D
p/ f (R(W
q, S
p)) (3)
で与えられる.なお,D
1= D
2= · · · = D
Q= D
と仮 定する.3.
問 題 設 定3. 1
センシングステージUAV
がU
1, U
2, . . ., U
M の順に訪問する場合,U
の決定問題は総センシング時間の最小化問題として定式 化でき,
find U ⊆ G ˆ which minimizes
∑
M m=1T
s(U
m) +
M−1∑
m=1
T
f(U
m, U
m+1) (4)
と書ける.このときの総センシング経路長
L
sは,U
a からU
bへの経路長をL
ab= ∥U
b− U
a∥
と定義する と,以下のように表すことができる:L
s=
M
∑
−1 m=1∥U
m+1− U
m∥. (5)
3. 2
データ収集ステージUAV
がW
1, W
2, . . ., W
q, . . ., W
Qの順に訪問する場合,
W
とScの決定問題は,総データ収集時間の最小 化問題として定式化できfind W ⊆ U, ˆ
Sˆ
cwhich minimizes
∑
Q q=1∑
Sp∈Sq
T
c(W
q, S
p) +
Q−1∑
q=1
T
f(W
q, W
q+1) (6)
と書ける.このときの総データ収集経路長
L
cは,以 下のように表すことができる:L
c=
Q
∑
−1 q=1∥W
q+1− W
q∥. (7)
4.
提 案 解 法4. 1
センシングステージセンシング点間の移動時間とセンシング時間には
T
f≫ T
sが成立するので,この最小化問題は総センシ ング経路長L
sの最小化問題としてfind U ⊆ G ˆ which minimizes
L
s=
M−1∑
m=1
∥ U
m+1− U
m∥ (8)
と書ける.本論文では,遺伝的アルゴリズムに基づい た
3
次元の巡回セールスマン問題の解法[9]
を利用し てUAV
の経路を決定する.UAV
がU
1からセンシン グを開始し,M
点のセンシング地点を訪問した後にU
M+1= U
1へ帰還する経路を考え,新たに総センシ ング経路長L
sを以下のように閉路として定義する:L
s=
∑
M m=1∥U
m+1− U
m∥. (9)
また,センシング地点は
G
からM
点ランダムに選択して
U = {U
′1, U
′2, . . ., U
′M}
を構成し,総センシング経路長
L
sが最短経路となるようにU
を並び替え てU
をrandomly select U ⊆ G then U = arg min
U=U
L
s(10)
のように構成する.
4. 2
データ収集ステージ避難所の収容人数の合計が約
5
万人の大阪市住吉 区でデータ収集を行う場合,一人当りのデータ量を300kBytes
と仮定すると,全てのデータをデータ伝送速度
54Mbps
で収集できたとしてもデータの収集に40
分程度かかるが,データ収集点間の移動時間は
UAV
が時速40km
以下で移動したとしても,20
分程度とな る[10]
.また,例えば6Mbps
程度でしか収集できな いような環境下ではデータ収集時間は300
分以上かか ると考えれる.実際には,これらの値は,一人当りの データ量,避難所の収容人数,UAV
の移動速度等様々 な要因に依存するが,本論文では上記の想定に基づきT
c≫ T
fを仮定する.このとき,この問題はデータ収 集時間の和の最小化問題に置き換えられる:W, ˆ
Sˆ
c= arg min
W ⊆U,Sc
∑
Q q=1∑
Sp∈Sq
D / f ( R ( W
q, S
p)).
(11)
4. 2. 1
全 探 索 法W
とScの全ての組合せを列挙し,その中からデー タ収集時間の和を最小にする組合せを探索する方法を 考える.与えられたQ
に対してW
に含まれるデータ収集点の総数は
N
W=
MC
Q(12)
であり,一方,
Q
個の要素からなるScの総数は第2
種スターリング数[11]
N
Sc= S ( P , Q ) = 1 Q!
∑
Q n=1(− 1 )
Q−nQC
nn
P(13)
で与えられるので,探索すべき組合せの総数は
N
W×N
Scである.これらを全て探索して最適な組合せを探す方 法は総データ収集時間の下界となり,全探索
(BS: Brute
Search)
法と呼ぶ.この計算のステップ数は最小でもO ( P × M
Q)
となるため(付録1.
参照),M
が大きい場 合,この方法により解を求めることは現実的でない.4. 2. 2
相 関 法与えられた
W
,Scに対し,S
p内の送信機に対す るf ( R ( W
q, S
p))
の最小値をf
min,q( R ( W
q, S
p))
とす る.W
q でのデータ収集時間を決定する支配要因は,T
c(W
q, S
p)
の最大値,すなわちf
min,q(R(W
q, S
p))
で あると仮定する.このとき,データ収集時間の最小化 問題をf
min,q( R ( W
q, S
p))
の全データ収集点W
上で の総和が最大となる問題と考える.したがって,この 問題は次式のように定式化できる:W, ˆ
Sˆ
c= arg max
W ⊆U,Sc
∑
Q q=1f
min,q( R (W
q, S
p)). (14)
f
min,q(R(W
q, S
p))
はR(W
q, S
p)
の増加関数となっ ていることから,上記の最適化問題を更に簡単にする ため,データ伝送速度の和ではなく,RSS
の和を最大 化する問題に置き換える:W, ˆ
Sˆ
c= arg max
W ⊆U,Sc
R
c(15)
R
c=
∑
Q q=1R
qc(16)
R
cq= min
Sp∈Sq
R
SpWq
. (17)
一般に,データ伝送速度は
RSS
の線形関数とはなって いないため,このような近似は厳密にデータ収集時間 を最小化しているとはいえない.UAV
で受信する信号 のSNR
をγ
とすると,雑音電力を一定値と仮定したと き,γ
はRSS
に比例した値となる.通信路容量に関す るシャノン限界により,データ伝送速度はlog
2( 1 + γ)
に比例した値として表されると仮定する.また,上記 の最適化問題において,
RSS
はdBm
の単位で扱って いる.つまり,データ伝送速度の和をRSS
の和に置 き換えるということは,評価関数をlog
2(1 + γ)
から10 log
10(γ)
に置き換えることに等しい.したがって,γ
が1
よりも十分に大きい場合には,式(15)–(17)
の 最適化問題は式(14)
と同等の最適化問題を扱っている と考えることができる.上記のように近似的な最適化問題を用いることが真 に妥当であるかは,両者を比較して検討する必要があ る.しかし,本論文の目的は両者の比較よりも後に述 べる正規化相互相関を使うことの有効性を示すことに あり,この妥当性検証は本論文で扱う範囲を超えてい るため,今後の課題とする.
R
Sp とR
Sp′の正規化相互相関をρ( p , p
′) = Cov(R
Sp, R
Sp′)
σ
RSpσ
RSp′(p, p
′= 1, 2, . . ., P, p , p
′) (18)
と定義する.ここで,Cov (X, Y)
はX
とY
の共分散,σ
XはX
の標準偏差を表す.互いの
RSS
マップの相関が高い複数の送信機から は同一の点でデータを収集できると考えられる.すなわち,Sc
= {S
1, S
2, . . ., S
Q}
は,同一の要素に含まれる送信機間の
RSS
マップが高い相関をもち,一方,異 なる要素に含まれる送信機間のRSS
マップが低い相 関をもつように分割すればよい.したがって,相関の しきい値をρ
thとし,find
Sˆ
csubject to
{ ρ(p, p
′) ≥ ρ
th(S
p, S
p′∈ S
q, p , p
′)
ρ(p, p
′) < ρ
th(S
p∈ S
q, S
p′∈ S
q′, p , p
′) (q, q
′= 1, 2, . . ., Q, q , q
′)
で分割できる.なお,この問題は,送信機を頂点とし,
RSS
マップの相関がρ
th以下の頂点間を辺でつないだ 無向グラフを考えることにより,彩色数をQ
に固定 したグラフ彩色問題[12]
として定式化できる(付録2.
参照).
S
ˆ
cが決まったので,W
はW
qに対する個別の最大 化問題W ˆ
q= arg max
Wq∈U
R
qc(q = 1, 2, . . ., Q) (19)
R
qc= min
Sp∈Sˆq
R
SpWq
(20)
を解くことによって決定できる.この方法の計算回 数は
O(P
2× M )
であり(付録3.
参照),相関(CO:
Correlation)
法と呼ぶ.なお,これらの方法で得られた解は最短経路を与え ないので,センシングステージの解法と同じように,
3
次元の巡回セールスマン問題の解法を利用してUAV
の経路を決定する.そのため,UAV
はW
1からデータ 収集を始め,Q
点でデータを収集した後にW
Q+1= Q
1 へ帰還する閉路として,総データ収集経路長をL
c=
∑
Q q=0∥ W
q+1− W
q∥ (21)
と再定義し,
L
cが最短経路となるようにデータ収集点 を最終的に並び替えるものとする.式
(9)
,(21)
より,提案法では,センシングステー ジ,データ収集ステージのそれぞれにおいて,センシ ング点,データ収集点の始点から開始して,始点へ帰 還するルートを決定しており,センシング点の終了点 からデータ収集ステージの始点へのルートについては 考えていない.これは,実際にはセンシングステージ を効果的に実施し,更にはデータ収集ステージにおい て大容量データを収集する可能性を考慮し,UAV
を センシングステージ及びデータ収集ステージにおいて 周回させることを想定しているからである.これらの ルートは周回ルートとして得られることから,データ 収集ステージの始点をセンシングステージの終了点と 最も近い点とすることにより,上記の問題については 回避できる.5.
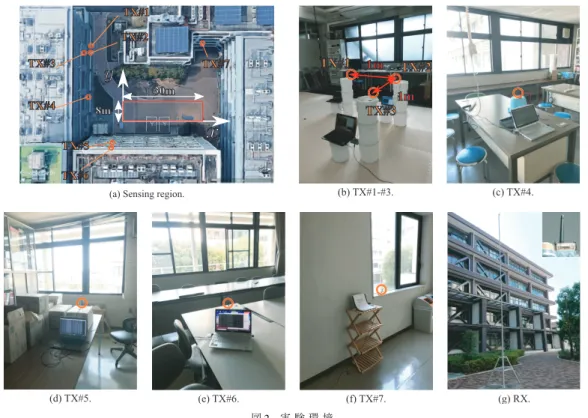
実験及び性能評価提案法の性能評価のため,大阪市立大学にて実験を 行った.図
2
にその写真を示す.7
台の2.4GHz
帯Wi-
Fi [13]
の送信機を図2 (a)–(f)
に示すよう屋内の窓際に 設置し,屋外でセンシングを行った.なお,UAV
の飛行 が禁止されているエリアであるため,図2 (g)
に示すよ うUAV
の代わりに受信機(RX)
をポールの先端に取り 付けた.センシング領域の大きさはX = 30m, Y = 8m,
Z = 10m
であり,そのx
軸,y
軸及びz
軸をそれぞ れ2m
間隔(付録4.
)で分割し(∆X = ∆Y = ∆Z = 2m,
N
1= 15, N
2= 4, N
3= 5)
,送信機からの信号のRSS
をN
v= 300
点でセンシングした.なお,同一センシング図2 実 験 環 境 Fig. 2 Photos of the experiment.
点では,
RSS
の大きな時間的変動は観測されなかった が,RSS
は十分時間を離して10
回センシングした値 の中央値とした.表1
に実験諸元を示す.図
3
に各送信機に対して得られたRSS
マップを示 す.実験で得られた全RSS
マップからボクセルをラン ダムにM(= ⌊N
v× B
sense⌋)
個選択し(0 < B
sense≤ 1)
, 部分RSS
マップを作成するものをランダムセンシング(RS: Random Sensing)
と呼び,その部分RSS
マップに 対して,相関法を適用した方法をランダムセンシング/
相関(RS/CO)
法と呼ぶ.RS/CO
法の結果は試行回数 を1000
回とし,中央値を示した.ここで,B
sense= 1
とした場合は全RSS
マップになるが,これを全領域 センシング(FS: Full Sensing)
と呼び,全探索法を適用 した方法を全領域センシング/
全探索(FS/BS)
法,相 関法を適用した方法を全領域センシング/
相関(FS/CO)
法と呼ぶ.提案手法はMATLAB [14]
により実装して いる.[10]
で は ,避 難 所 一 箇 所 に つ き ,平 均 約D =
400Mbytes
のデータを収集することを想定しており,全てのデータを収集するために
UAV
は4
周程度する 必要があることが示されている.本論文では一度の表1 実 験 諸 元 Table 1 Specifications of experiment.
実験場所 大阪市立大学
領域サイズ X=30m×Y=8m×Z=10m センシング間隔
∆X=∆Y=∆Z=2m N1=15,N2=4,N3=5, Nv=300
送信機台数(P) 7
無線通信ツール 2.4GHz帯Wi-Fi アンテナ ダイポール 受信回数 10回
飛行で全てのデータ収集を行うことを想定しており,
UAV
の飛行時間が20–40
分であることを考慮して,データサイズを
D = 100Mbytes
とする.想定よりデー タサイズが小さい場合は,今回のアルゴリズムではT
c≫ T
f を想定しているので,データサイズが大き い方が提案している手法がより効果的であるが,飛行 に充てられる時間が増えるため,更にデータ収集点を 増やすことが可能であると考えられる.一方,データ サイズが想定より大きくなった場合は,一度に全ての データを回収できず,複数回周回する必要があると考 えられる.また,IEEE 802.11-2016
標準規格(帯域幅図3 RSSマップ(Bsense=0.25) Fig. 3 RSS maps (Bsense=0.25).
図4 Bsenseに対する総センシング経路長(Ls) Fig. 4 Dependency of the total sensing route length (Ls) on the
RSS sensing rate (Bsense).
20MHz
)[15]
を仮定してRSS R dBm
に対するデータ 伝送速度f ( R ) Mbps
として以下を採用した:f (R) =
6 . 5 (− 82 ≤ R < − 79 ) 13.0 (−79 ≤ R < −77) 19.5 (−77 ≤ R < −74) 26.0 (−74 ≤ R < −70) 39 . 0 (− 70 ≤ R < − 66 ) 52 . 0 (− 66 ≤ R < − 65 ) 58.5 (−65 ≤ R < −64) 65.0 (−64 ≤ R)
. (22)
図
4
にB
senseに対する総センシング経路長を示す.B
senseの増加に対して,総センシング経路は線形に増加しており,
FS/CO
法と比較してB
sense= 0.5
でも総 センシング経路長を約40%
短縮できることがわかる.図
5
にB
senseに対する総データ収集時間を示す.なお,総データ収集時間は決定したデータ収集点におけ る式
(3)
の和であり,T
total=
∑
Q q=1∑
Sp∈Sq
T
c(W
q, S
p) (23)
と書ける.また,
Q = 1
のときのデータ収集は単一の 点で行われるため,RS/CO
法でQ = 1
とした結果は従 来法に相当する.更に,FS/BS
法でQ = 7
とした場合,総データ収集時間は下界となる.図
5
では,B
sense及 びQ
の増加に伴い総データ収集時間は減少しており,B
sense= 0.25
でほぼ一定に収束していることが確認できる.これは,
B
senseを増加させることでデータ収集 点の候補が増え,RSS
が高くなるデータ収集点を選択 できるからである.一方,Q
が少ない場合,総データ図5 Bsenseに対する総データ収集時間(Ttotal)
Fig. 5 Dependency of total data collection time (Ttotal) on the RSS sensing rate (Bsense).
図6 データ収集点数(Q)に対する総データ収集時間(Ttotal) Fig. 6 Dependency of total data collection time (Ttotal) on the
number of data collection points (Q).
収集時間が小さくならないのは,
RSS
が同時に高くな るようなデータ収集点を選択しても,全ての送信機に 対してRSS
が十分高くならないためである.Q = 3
と した場合は,下界と比較して,B
sense= 0 . 25
で総デー タ収集時間の増加は30%
である.一方,図4
から,こ の場合の総センシング経路長は全領域センシングの総 センシング経路長と比較して70%
短い.そこで,以降では
B
sense= 0.25
と設定する.図
6
にデータ収集点数に対する総データ収集時間を 示す.なお,FS/BS
法の結果は各データ収集点数(Q)
における総データ収集時間の最小値を表している.各Q
ごとにFS/BS
法とFS/CO
法の総データ収集時間を 比較すると,Q = 2
のときにFS/CO
法はFS/BS
法と 比較して10%
増加することがわかる.このとき,そ れぞれの方法で選択されたデータ収集点のRSS
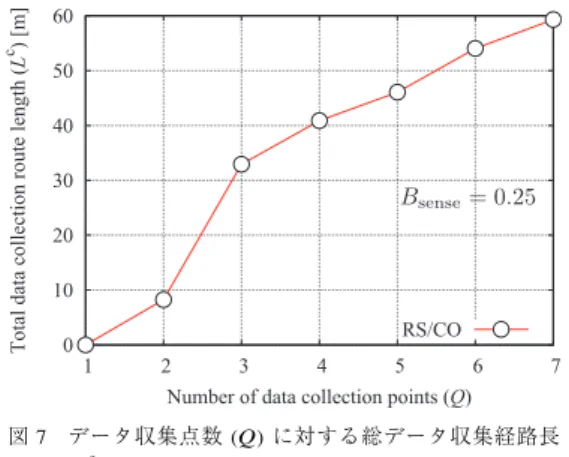
を比図7 データ収集点数(Q)に対する総データ収集経路長 (Lc)
Fig. 7 Dependency of the total data collection route length (Lc) on the number of data collection points (Q).
較すると,
FS/BS
法でのRSS
の最小値は,FS/CO
法 のRSS
の最小値よりも低くなっているが,RSS
の最 大値はFS/CO
法のRSS
の最大値よりも高くなってい ることが確認できた.つまり,この誤差は各点におい てRSS
の最小値のみを考慮してデータ収集点を選択し たことにより発生したと考えられる.また,FS/BS
法 及びFS/CO
法はQ = 5
以上で一定となっており,こ の値が総データ収集時間の下界である.RS/CO
法の総 データ収集時間はQ = 7
でその下界と一致することが わかる.更に,Q = 1
のときRS/CO
法の総データ収 集時間は下界と比較して約100%
増加するが,Q = 3
ではその増加を約30%
に抑えることができる.図
7
にRS/CO
法におけるデータ収集点数に対する 総データ収集経路長を示す.Q = 3
ではQ = 7
,つま り各送信機に対して最適なデータ収集点を選択する場 合と比較して総データ収集経路長を50%
短縮できる.最後に,計算回数の比較を行った,与えられたパラメー タ値,
N
v= 300
,B
sense= 0 . 25
,M = 75 ( = N
v× B
sense)
,P = 7
とQ = 3
に対して,BS
法とCO
法の計算回数 はそれぞれ3.0 × 10
6と4.0 × 10
4となり,BS
法に比 較して,CO
法は計算回数を10
2分の1
にできる.6.
む す び本論文では,
RSS
の正規化相互相関を利用した複数 のデータ収集点決定法を提案した.実験値による経路 長及びデータ収集時間の比較により,7
台の送信機で データ収集を行う場合,全領域をセンシングすれば,CO
法によりデータ収集点5
点で総データ収集時間を 最小にできることを示した.また,25%
センシングでデータ収集点を
3
点とした場合,下界と比較してデー タ収集時間を約30%
を増加させるだけで,総センシ ング経路長を70%
短縮できることを示した.また,そ のときのCO
法の計算回数はBS
法の10
2分の1
とな ることを示した.本論文では
UAV
の消費エネルギーを考慮せず,UAV
が必ず一度にセンシング及びデータ収集が可能である バッテリーを搭載していることを仮定して経路長を算 出している.しかし,実際は避難所は広域に分布して いることが多く,UAV
が帰還できない可能性がある ため,UAV
の消費エネルギーを考慮する必要がある.また,本論文では,データ収集点数
Q
は事前に与えら れた値を用いており,Q
の決定方法自体については検 討していないが,実際には避難所の密集度合い等の要 因により決定されるべき値である.更に,センシング 点はランダムに選択するという手法を用いているが,RSS
値の空間相関の強さに応じてセンシング点を離し て配置するなど,効果的な選択手法が存在する.以上 のことから,本研究の今後の課題として,UAV
の消費 エネルギーを考慮したルート設計法,データ収集点数 の決定方法,及びセンシング点の選択方法等が挙げら れる.謝辞 本研究の一部は,科学研究費補助金(基盤研 究
B
課題番号JP18H01445
,JP19H04096
)及び公益財 団法人アイコム電子通信工学振興財団から助成を受け て行われた.文 献
[1] 復 興 庁 ,“避 難 所 生 活 者・避 難 所 の 推 移( 東 日 本 大 震 災 ,阪 神・淡 路 大 震 災 及 び 中 越 地 震 の 比 較 ),” https:
//www.reconstruction.go.jp/topics/hikaku2.pdf,Oct. 2011.
[2] 総務省,“平成23年版情報通信白書,” https://www.soumu.
go.jp/johotsusintokei/whitepaper/ja/h23/html/nc111100.html
[3] 内閣府,“小型無人機の利用活用と技術開発のロードマップ,”
https://www.kantei.go.jp/jp/singi/kogatamujinki/pdf/siryou12.pdf [4] M. Takai, J. Martin, S. Kaneda, and T. Maeno, “Scenargie as a network simulator and beyond,” J. Inf. Process., vol.27, pp.2–9, Jan. 2019. DOI: 10.2197/ipsjjip.27.2
[5] A.M. Hayajneh, S.A.R. Zaidi, D.C. McLernon, M. Di Renzo, and M. Ghogho, “Performance analysis of UAV enabled disaster recov- ery networks: a stochastic geometric framework based on cluster processes,” IEEE Access, vol.6, pp.26215–26230, May 2018. DOI:
10.1109/ACCESS.2018.2835638 [6] DJI, https://www.dji.com/
[7] P. Toth and D. Vigo, eds., The Vehicle Routing Problem, Society for Industrial and Applied Mathematics, 2002.
[8] A. Danjo, S. Hara, T. Matsuda, and F. Ono, “A Tensor Completion- Based Selection Method of a Single Data Collection Point for Multiple Shelters in a UAV Enabled Disaster Recovery Network,”
Proc. 12th Int. Conf. Advances in Satellite and Space Commun.
(SPACOMM 2020), pp.7–12, Lisbon, Portugal, Feb. 2020.
[9] J. Grefenstette, R. Gopal, B. Rosmaita, and D.V. Gucht, “Genetic algorithms for the traveling salesman problem,” Proc. 1st Int. Conf.
Genetic Algorithms and their Applications, pp.160–168, 1985.
[10] A. Danjo, A. Murata, S. Hara, T. Matsuda, and F. Ono, “Con- struction of a temporary message collection system using a drone for refugees in a large-scale disaster,” Proc. 2020 IEEE 91st Veh. Technol. Conf., pp.1–5, May 2020. DOI: 10.1109/VTC2020- Spring48590.2020.9128632
[11] D.E. Knuth, The Art of Computer Programming, Volume 1: Fun- damental algorithms, Third Edition, Addison-Wesley, 1997.
[12] 久保幹雄,ジョア(ジョアン)・ペドロ・ペドロソ,村松 正和,アブドル・レイス,あたらしい数理最適化,近代科 学社,2016.
[13] Wi-Fi Alliance, https://www.wi-fi.org/
[14] MATLAB, MathWorks, https://mathworks.com/
[15] IEEE Standard for Information technology Telecommunications and information exchange between systems Local and metropoli- tan area networks Specific requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) speci- fications, 2016.
[16] A. Mawira, “Models for the spatial correlation functions of the (log)-normal component of the variability of VHF/UHF field strength in urban environment,” Proc. 3rd IEEE Int. Symp. Per- sonal, Indoor and Mobile Radio Commun., Boston, MA, USA, pp.436–440, Oct. 1992. DOI: 10.1109/PIMRC.1992.279892 [17] P. Taaghol and R. Tafazolli, “Correlation model for shadow fading
in land-mobile satellite systems,” Electron. Lett., vol.33, no.15, pp.1287–1289, July 1997. DOI: 10.1049/el:19970905 [18] L. Liu, C. Tao, D.W. Matolak, T. Zhou, and H. Chen, “Investigation
of shadowing effects in typical propagation scenarios for high- speed railway at 2350MHz,” Int. J. Antennas Propag., Hindawi Publishing Corporation, Oct. 2016. DOI: 0.1155/2016/8782671 [19] M Series, ITU 2135-1, “Guidelines for evaluation of radio interface
technologies for IMT-Advanced,” 2009.
付 録
1. BS
法の計算回数W
とScの一つの組合せに対して,式(11)
で,総デー タ収集時間を計算するのに必要な計算回数は2P − 1
で与えられる.これはW
とScの全ての組合せに必 要になるので,全ての総データ伝送時間を列挙する ために必要となる計算回数は(2P − 1) × N
W× N
Scと なる.更に,全ての総データ伝送時間から最小値を探 索するのに必要な計算回数はN
W× N
Sc− 1
で与えら れるので,式(11)
を計算するのに必要な計算回数は2P × N
W× N
Sc− 1
となる.N
W の計算量がO(M
Q)
で与えられ,N
Sc≥ 1
であることを考慮に入れると,最小の計算量は
O ( P × M
Q)
となる.2. CO
法のグラフ彩色問題としての定式化 送信機を頂点とした無向グラフG (V, E)
を考える.ここで,頂点の集合
V
はV = {v
1, v
2, . . ., v
P} (A · 1)
であり,一方,辺の集合
E
はE = { e
αβ|α, β = 1 , 2 , . . ., P , α > β} (A · 2) e
αβ=
{
0 (ρ(α, β) ≥ ρ
th)
1 (ρ(α, β) < ρ
th) (A·3)
のように相関が低い頂点だけを辺でつなぐ.このとき,0
と1
の2
値をとる変数h
pqを導入することにより,P
個の頂点の集合を,辺でつながれていない頂点を一 つの集合の要素としたQ
個の集合に分割する問題に帰 着できる.すなわち,h
pqの決定問題としてarg min
hp q
∑
vα,vβ∈V
e
αβ(= 0 ) (A · 4)
subject to { ∑
Qq=1
h
pq= 1
h
αq+ h
βq≤ 1 + e
αβ(A · 5)
のように定式化できる.ただし,ρ
thはQ
個の集合に 分割されるまで変化させる必要がある.1
回の計算で 変化させるρ
thの幅を0 < ∆ ρ < 1
と定義すると,ρ
th の決定問題は二分探索で求めることができ,計算回数 は最大でlog
2(2/ ∆ ρ) = 1 − log
2∆ ρ
となる.頂点の組合せは
N
Sc通りである.また,一つの組合 せに対して,異なる二つの頂点の全ての組合せに対し て辺が存在するかを調べる必要があり,その計算回数 はpC
2で与えられるので,合計の計算回数はN
gcp= P
2× (1 − log
2∆ ρ) (A·6)
となる.3. CO
法の計算回数送信機
2
台の一つの組合せに対して,式(18)
の計算 回数はO ( M )
である.この計算を異なる送信機の全て の組合せ,PC
2通りに対して行う必要があるので総計 算回数はN
ρ= P
2× M (A · 7)
となる.また,一つの
q
に対して,式(20)
で,W
qの 全ての要素に対してR
cqを計算するのに必要な回数は( P
q− 1 ) × M
であり,式(19)
で,それらから最大値を 探索するのに必要な計算回数はM − 1
である.したがって,
S
1, S
2, . . ., S
Qのそれぞれに対して最小値を探索するのに必要となる計算回数の和は
N
min−max=
∑
Q q=1{(P
q− 1)M + (M − 1)}
= PM − Q (A·8)
となる.ゆえに,相関法の計算量は,式
(A · 6)–(A · 8)
よ りM
の支配的な項だけを残すとO ( P
2× M )
となる.4.
空間センシング間隔マイクロ波帯無線信号のシャドウイングに対して は,その相関距離が様々な環境で実験により測定され モデル化されている
[16]
〜[19]
.その中で最短の相関 距離は,[19]
に示されている都市部マイクロセル(屋 外から屋内)(Urban Micro Cell, Outdoor-to-Indoor)
の7m
である.したがって,シャドウイングによる空間 相関があるようなRSS
の空間センシング間隔として2m ( < 7 m)
は妥当であると考えられる.(2020年5月21日受付,9月19日再受付,
11月19日早期公開)
檀上 梓紗 (正員)
平26大阪市立大学工学部情報工学科卒.
平28同大学大学院前期博士課程了.現在 株式会社ダイヘン勤務.平30より大阪市 立大学大学院後期博士課程在学中.無人航 空機を用いた無線通信システムに関する研 究に従事.
原 晋介 (正員)
昭60大阪大学工学部通信工学科卒.平2 同大大学院博士後期課程了.博士(工学). 平9同大助教授を経て,現在,大阪市立大 学大学院工学研究科教授.無線通信方式と 信号処理の研究に従事.平19本会論文賞 受賞.
松田 崇弘 (正員:シニア会員)
平8大阪大学工学部通信工学科卒,平11 同大大学院博士課程了,博士(工学).同 年同大大学院工学研究科助手,平17講師,
平21准教授,平30首都大東京(令2より 東京都立大)大学院システムデザイン研究 科教授,現在に至る.無線ネットワーク,
ネットワーク計測に関する研究に従事.平13本会学術奨励賞,
平24本会通信ソサイエティBest Tutorial Paper Award,マガジ ン論文賞受賞,平26本会論文賞受賞.IEEE,情報処理学会各 会員.
小野 文枝 (正員)
平24情報通信研究機構入所.以来,無 人航空機を用いた無線通信システムや遠隔 制御用無線通信システムなどに関する研究 に従事.現在,総務省に出向中.博士(工学)