工業力学
入江敏博/山田元
noted by Kazuma MATSUDA
2016
年
5
月
29
日
1.
平面内のつり合い
物体に働いてその運動状態を変化させる,あるいは物体の形を変える原因となる作用を力(force)という.
力学(mechanics)とは力の作用によって起こる現象を調べる科学で,静力学(statics)と動力学(dynamics)
とに大別される.
1.1
力の表し方
物体に力が働く場合,その作用は力の大きさのほか,方向や向き,力が働く点によって異なる.力を図示
するには,図1・1のように力が働く点Oから力の方向にその大きさF に比例した線分OAを描き,力の
向きに矢印を付けて表す.力が働く点Oを着力点(point of application)といい,力の方向を示す直線を作
用線(line of action)と呼ぶ.大きさと同時に方向と向きをもつ量をベクトル(vector)と呼び,太文字 Fや
矢印を付した→−F で表す.力の大きさだけを表すときは細字F や絶対値の記号を付けて|F|と書く.
1.2
工業力学の単位
(
国際単位
)
国際キログラム原器に働く重力の大きさを単位に用いて,これを1キログラム重(kg-wt)と呼ぶのが重力
単位系である.国際単位系(International System of Unit, SI) は基本単位,組立単位および補助単位から構
成される.
力単位系でのちからの大きさをkgf と表し,SI単位系における力の単位Nとの関連について考えると,SI 単位では1 kgの質量をもつ物体に1 m/s2の加速度を与える力の大きさを1 Nと約束しているので 1 N
=
1[
kg]
× 1[
m/s2] =
1 kg· m/s2 重力加速度の標準値がg=
9.80665 m/s2であることから 1 kgf=
9.81 kg· m/s2=
9.81 N あるいはその逆数をとって 1 N=
0.102 kgf の関係がある.1.3
一点に働く力の合成と分解
1. 二つの力の合成 図1・2(a)に示すように,物体の一点Oに二つの力F1, F2が作用するとき,物体にはこれら二つの力を 二辺とする平行四辺形の対角線OCによって表される力 Rが働いたのと同様の効果が生じ,力 RをF1と F2との合力(resultant force)といい,合力を求めることを力の合成と呼ぶ.平行四辺形を描く代わりに,図1・2(b)のように力を配置したとき,△OACを力の三角形(force triangle)と呼ぶ.
合力Rは計算によって求めることができ,図1・3のように力F1 とF2 の間の角をαとすれば,余弦定 理より R2
=
F12+
F22− 2F1F2cos(
180◦− α) =
F12+
F22+
2F1F2cosα であるから,合力の大きさは R=
√F12+
F22+
2F1F2cosα (1.1) で与えられ,RとF1の間の角をθとすれば,正弦定理より F2 sinθ=
R sin(
180◦− α)
=
R sinα となり,角θは sinθ=
F2 R sinα (1.2) によって計算される.2. 力の分解 一つの力をこれと同じ働きをする二つ以上の力に分けることを力の分解といい,その結果得られた力を もとの力の分力(component of force)と呼ぶ. 一つの力Fを二つの力に分解する場合に,分力の方向を指定するか,どれか一つの分力を与えない限り, 図1・5のように分解の方法は無数にある.図1・6のように力Fを平面上にとった直交座標の軸の方向の 分力 Fx, Fyに分解するとき,Fとx軸の間の角をθとすれば,分力の大きさは Fx
=
F cosθ , Fy=
F sinθ (1.3) で計算される.力Fが未知量で,二つの分力の大きさが向きを含めて与えられているとき,Fの大きさは F=
√ Fx2+
Fy2 (1.4) から得られ,方向は tanθ=
Fy Fx ∴ θ=
tan−1 Fy Fx (1.5) によって決定される. 3. 一点に働く多くの力 図1・7(a)のように一点Oに二つ以上の力F1, F2, · · · , FN が作用するときは図(b)のように力の三角形 の方法によってその合力を求めることができる.まず F1とF2の和−−→OA2を求め,次にこれに F3を加えて 三つの力F1, F2, F3 の和−−→OA3を求め,さらに F4を加えるというように力の三角形をつくることにより, 全ての合力R(
−−→OAN)
を求めることができる.多角形OA1A2· · · AN のことを力の多角形(force polygon)と 呼ぶ. 図1・8のように一つの平面内に多くの力が働くとき,合力 Rのx, y軸方向の分力の大きさは各々の力 のx, y軸方向の分力の和に等しくRx
=
F1cosθ1+
F2cosθ2+
· · ·+
FNcosθNRy
=
F1sinθ1+
F2sinθ2+
· · ·+
FNsinθN
で与えられ,合力の大きさは R
=
v u t ∑ i Ficosθi 2+
∑ i Fisinθi 2 (1.7) 方向は tanθ=
∑ i Fisinθi ∑ i Ficosθi ∴ θ=
tan−1 ∑ i Fisinθi ∑ i Ficosθi (1.8) によって計算される.1.4
一点に働く力のつり合い
物体に働く二つ以上の力の大きさがゼロとなる場合,力は物体に何の働きもせず,これらの力はつり合っ ているという. 物体のある一点にいくつかの力が働く場合,図1・7に示す力の多角形において,その終点AN が始点O に一致するときにその合力はゼロになり,即ち一つの点に働くいくつかの力が全体としてつり合うための 条件は,これらがつくる力の多角形が閉じることであり,x, y軸方向の分力で考えれば,(1.6)式の二つの 式がゼロとなるときで Rx=
∑ i Ficosθi=
0 Ry=
∑ i Fisinθi=
0 (1.9) 特に図1・11(a)のように一点に働く力がつり合うときは,力の三角形は閉じて図(b)のようになり,この 三角形の内角はそれぞれ180◦− α, 180◦− β, 180◦− γに等しいから,正弦定理よりF1 sin
(
180◦− α)
=
F2 sin(
180◦− β)
=
F3 sin(
180◦− γ)
となり,これより F1 sinα=
F2 sinβ=
F3 sinγ (1.10) を得る.一点に働く三つの力がつり合うためのこの条件式はラミの定理(Lami’s theorem)と呼ばれる.1.5
力のモーメント
1. 力のモーメント 図1・14のようにスパナに力Fを加えるとボルトは回転するが,このとき,力の大きさとボルトの中心 線から力までの距離dが大きいほど,ボルトを締め付ける働きは大きい.このように物体をある軸のまわ りに回転させようとする力の働きを力のモーメント(moment of force)といい,その大きさは M=
Fd (1.11) で与えられる.dのことをモーメントの腕(arm)の長さと呼ぶ.物体を回転させようとする向きは,通常同 一平面内に働く時計まわりのモーメントの符号を負,反時計まわりのモーメントの符号を正にとり,この ように力のモーメントも大きさと向きももつベクトル量で,力のモーメントの単位はN· mで表される. 2. 力のモーメントの合成 物体上の任意の点に働く二つの力 F1, F2 によるこれらと直角なO 軸まわりの力のモーメントを考え る.図1・15のようにO点を原点として,線分OAを含む直線を x軸とする直交座標系O-xyをとり,力F1, F2がx軸となす角をそれぞれθ1, θ2,O軸まわりの力のモーメントの腕をd1, d2,線分OAの長さを aとすれば,d1, d2は d1
=
a sinθ1, d2=
a sinθ2 二つの力によるモーメントも大きさはそれぞれ M1=
F1d1=
F1a sinθ1 M1=
F2d2=
F2a sinθ2 その和は式(1.6)によりM1
+
M2= (
F1sinθ1+
F2sinθ2)
a=
Ra sinθここでRは F1とF2 の合力Rの大きさで,θはこの合力が x軸となす角を表す.a sinθ
=
dはRのモー メントの腕に等しいから,上式の右辺はO軸まわりの合力のモーメントを与え, M1+
M2=
M (1.12) で物体の一点に働く二つの力の,これらに直角な軸のまわりのモーメントの和は合力のモーメントに等し く,この関係はある一つの平面内の一点に多くの力が働く場合にも当てはまり,バリニオン(Varignon)の 定理と呼ばれる. この定理により,一つの力のモーメントが求めにくい場合に,まずその分力のモーメントを求めておい て,後でこれらを加え合わせてもよいことがわかる.図1・16のように xy平面内の一点P(
x,y)
に力 Fが 働く場合,O軸まわりの力のモーメントはその分力 Fx, Fyによるモーメントを加え合わせて M=
Fyx− Fxy (1.13) となる.この図の場合,Fyによるモーメントは正,Fx によるモーメントは負の値をもつ. 3. 偶力とモーメント 大きさが等しく,向きが反対な二つの平行力を偶力(couple)といい,図1・18に示す一組の偶力が働く 平面に垂直なO軸まわりのモーメントはM
=
F· OA − F · OB=
F· BA=
Fd (1.14) で与えられる.dは二つの力の間の距離で,偶力の腕(arm of couple)と呼び,偶力のモーメント Mの大き さは平行力の大きさと腕の長さだけで決まり,軸の一には関係しない.偶力のモーメントも物体を反時計 方向に回転させるときを正と定める. 偶力は物体を回転させる作用をもつだけで,物体を移動させる働きはもたない.また,力と腕の長さの 積が一定である限り,偶力の作用は等しく,平面内で任意に平行移動や回転をさせても(図1・19),一つの 平面だけでなくこれと平行な他の平面に移しても(図1・20)その働きは変わらない. 4. 力の移動と変換 ボルトをスパナで締め付ける場合の働きを考える.図1・21(a)のようにA点に力 Fを加えるとき,図 (b)のように Fと平行で向きが逆な二つの力 F, −Fを加えても,スパナにはA点に働くF以外の力を加 えたことにはならない.この場合,A点に働く力FとO軸に働く力−Fが偶力となり大きさFdのモーメ ントが生じるから,A点に力を加えた結果,図(c)のようにボルトには力Fと大きさFdのモーメントを加 えたのと同じ効果を生じる. このように Fをdだけ平行移動する場合,この力のほかに大きさFdのモーメントを加えれば物体に及 ぼす作用は変わらず,逆に力とモーメントを合成して一つの力で置き換えることも可能である.1.6
着力点が異なる力の合成とつり合い
1. 一点に集まる力の合成 図1・23のように物体の二点A, Bに一つの平面内にある力 F1 とF2が働く場合,力はその大きさを変 えない限り一定の作用線上をどこへ移動しても物体に与える作用に変わりはないので,F1 とF2とをそれ ぞれの作用線の支点Oへ移動し,この点で二つの力を合成することができる. 2. 平行な力の合成 二点A, Bに働く力 F1, F2が平行な場合は作用線の交点が求まらないが,このとき図1・24のように, A, B点にそれぞれ大きさが等しく向きが反対な一組の力−F, Fを作用させても物体に特別な力を加えた ことにはならず,合力 R1, R2の作用線はある交点Oをもつ.O点で R1, R2を合成した力 Rはもとの二 つの力F1, F2の合力に等しく,RはF1とF2に平行で,その大きさは R=
F1+
F2 (1.15) また合力 Rを作用線上を線分AB上の点Cまで移動することができ,この場合,三角形の相似の関係から AC OC=
F F1 , BC OC=
F F2 よって AC BC=
F F1 F F2=
F2 F1 (1.16) となり,C点は線分ABを二つの力の大きさの逆比に内分する. 平行なF1, F2が互いに反対な向きをもつときも,図1・25のように上記と同様な方法で合成することが でき,合力の大きさは二つの力の差に等しく,その作用線は線分ABを力の大きさの逆比に外分する点C を通る. 図1・26のように,任意の点Oに対する平行力 F1, F2とその合力 Rの腕の長さをそれぞれd1, d2およ びdとすれば,(1.16)式よりd1− d d− d2
=
F2 F1 ∴ F1(
d1− d) =
F2(
d− d2)
∴ F1d1+
F2d2=
F1d+
F2d= (
F1+
F2)
d=
Rd(
∵(
1.15))
(1.18) となり,F1d1+
F2d2はF1とF2 のO点まわりのモーメントの和を表し,Rdは合力Rのモーメントを表 していることから,前節のバリニオンの定理は並行力の場合にも当てはまることがわかる. 3. 多くの力の合成(作図による方法) 図1・27(a)のよううに,一つの物体に同一平面上にあって着力点が異なる四つの力F1, F2, F3, F4が働 く場合を考えると,図(b)のようにこれらの四つの力で作られる多角形P0P1P2P3P4P5を描けば,辺 P0P4 がその合力の大きさを与え,このようにしてできる力の多角形を支力図(force diagram)と呼ぶ. 合力Rの作用線を求めるには,まず力と同じ平面内にある任意の一点 Oを選び,この点と多角形の各 頂点を結ぶ.次に力 F1上の任意の点Q1 からOP1 に平行な直線Q1Q2 を引き,F2 の作用線との交点を Q2 とし,Q2からOP2 に平行な直線Q2Q3 を引いて F3との交点Q3,同様の手順で Q4 を求める.こう して求めた二つの点 Q1 とQ2 からそれぞれ OP0 とOP4 に平行な二本の直線 Q1Q0. Q4Q0 を引いてその 交点Q0 を求めれば,この点が合力 Rの作用線上の点となる.その理由は図1・27(b)に見るように,力 F1, F2, F3, F4がそれぞれ−−−→OP1(
F1)
,−−−→P1Oと−−−→OP2(
F2)
,−−−→P2Oと−−−→OP3(
F3)
,−−−→P3Oと−−−→OP4(
F4)
といった 分力の合成によって得られ,全体の合力Rはこれらの分力の全ての合成であるが,合力Rを含めた力の多 角形が閉じる条件から,Rは−−−→P0Oと−−−→OP4を合成して得られるものと等しい.従って,−−−→P0O, −−−→OP4に平行な 直線Q0Q1とQ0Q4 の交点Q0は全ての力の合力の作用線上の点となり,このようにQ0, Q1, Q2, Q3, Q4四つの力が全て平行なときは,示力図は図1・28(b)のように各々の力を全て連ねた直線となる.この場 合は図(a)のように F1上に任意にとった点Q1 から示力図(a)に描かれた線分OP1, OP2, OP3, OP4 に平 行な索線を順次引くことによって連力図(b)が描かれ,その結果合力Rは点Q0を通り,四つの力の和に等 しい大きさでこれらと平行な力となる. 4. 多くの力の合成(計算による方法) 力と同じ平面内に直交座標系 O-xy をとり,力 Fi の着力点を Pi
(
xi,yi)
この力が x 軸となす角を θi で表せば,物体に働く力 Fi の効果は原点 O において x, y軸方向に働く力 Ficosθi, Fisinθi と大きさ Mi= (
Fisinθi)
xi−(
Ficosθi)
yi のモーメントに置き換えることができる.同じ平面にいくつかの力が作用 する場合は,これらの合成により,原点に大きさが R=
v u t ∑ i Ficosθi 2+
∑ i Fisinθi 2 (1.19) に等しく,x軸角θ tanθ=
∑ i Fisinθi ∑ i Ficosθi ∴ θ=
tan−1 ∑ i Fisinθi ∑ i Ficosθi (1.20) をなす合力と,原点まわりの大きさ M=
Rr=
∑ i Fi(
xisinθi− yicosθi)
(1.21) のモーメントに置き換えられ,(1.21)式のrは合力の腕の長さであり,その値を知れば合力の作用線が求め られる. 5. 着力点が異なる力のつり合い 一点に働くいくつかの力がつり合うためには,単に合力がゼロであればよかったのが,着力点が異なる 場合には,その合力がゼロでも偶力の和がゼロでないと回転作用が残ることになり,全ての力が完全につ り合うためには,その合力と偶力の全てがゼロとなる必要があり∑ i Ficosθi
=
0 , ∑ i Fisinθi=
0 ∑ i Fi(
xisinθi− yicosθi) =
0 (1.22) が成り立たなければならない.即ち,着力点が異なる二つの力がつり合うのは大きさが等しく向きが逆で, かつその作用線が一致するとき,平行でない三つの力がつり合うのは,その合力がゼロで,これらの力の作 用線が一点で交わるときに限られる.1.7
支点と反力
1. 反力 二つの物体A, Bが接触しているとき,物体Aが物体Bを押すと,作用・反作用の法則(Newtonの第三 法則)により,接触面においてAはBから同じ力で押し返され,この反作用による力を反力(reactor force) と呼ぶ.接触点が完全に滑らかで摩擦がないときは,反力の方向は接触面に垂直となる.現実には多少な りとも摩擦が存在するため,ある程度斜めの力が働く. 2. 支点の反力 物体を支え,その運動を拘束する支点には,図1・32に示す三つの種類がある. (a) 移動支点 一定の方向への移動が可能な支点. 反力 Rは支点の移動方向と垂直な方向 ローラーで案内された支点や,滑らかな平面をすべる棒の端 (b) 回転支点 回転だけが自由なもの 反力 R′は回転の中心を通る斜めの方向 滑らかなピンで支えられたときや,棒の橋が粗い面の上に置かれた場合 (c) 固定支点 移動も回転もできない 反力 R′′ のほかにモーメントの反作用Mが生じる.1.8
トラス
鉄塔,クレーン,橋梁など,いくつかの部材 (member) を組み合わせて作られた構造物を骨組構造 (framework) といい,その部材が全て両端で他の部材とピンによって結合されている骨組構造がトラス (truss)であり,各結合点を接点(joint)と呼ぶ. 滑らかなピンは回転に対して抵抗がないため,ピンの中心まわりにモーメントをもち得ず,部材が接点 に及ぼす力,部材が接点から受ける反力ともにピンの中心を通る.部材の両端がピンで結合されているた め,部材に外力が働かなければ各部材が両端の接点から受ける力がつり合う必要があり,そのため,この二 つの力はピンの中心と中心とを結ぶ作用線をもち,互いに大きさが等しく,方向が反対な力である.従っ て直接外力を受けない部材には,引張力か圧縮力のいずれかが働き,引張力を受ける部材を引張材(tensionmember),圧縮を受ける部材を圧縮材(compression member)と呼ぶ.部材の自重は部材間に働く力に比べ
て小さく省略できる場合が多い. 結合点が角度の変化を許さないように接合された構造をラーメン(Rahmen)と呼び,力のほかモーメント も部材の結合部を通じて伝達される. トラスの各部材に働く力を求めるには次の二つの方法が用いられる. 1. 接点法 まずトラスに働く外力や反力を求め,次いで各接点ごとに力のつり合い条件を考えて,各々の部材に働 く力を求める.部材に引張力や圧縮力が作用するとその内部に内力(internal force)が働くが,一つの接点 において部材に三つ以上の未知の内力が働くときはこの方法では解くことができず,その場合は未知力が 二つ以内の部材の接点から解き,部材に働く力の向きがわからないときは,部材が引張力を受けているも のと仮定し,解いて得た値の符号を見て判定する.このとき正の量が引張力,負の量が圧縮力である. トラスの重量を考えに入れない限り,支点反力や各部材に働く内力に対して部材の長さは関係しない. 2. 切断法 接点法が解き得る接点から順に解くのに対し,ある部材のナイ力を直接求めたい場合に切断法を用いる. この方法は部材を通る仮想の切断面を考え,この仮想面に働く部材の内力を外力と同様に考えて力のつり 合いの式から求める.切断面は未知力の数が三つ以内になるように選ばなければならない.
演習問題
1・1 図1・38のように,質量100 kgの円柱を二本のロープで吊って真上に引 き上げたい.各々のロープをいくらかの力で引張ればよいか. 質量m=
100 kg.鉛直方向と20◦をなすロープの張力をT1,30◦を なすロープの張力をT2 とする.Lamiの定理より mg sin(
20◦+
30◦)
=
T1 sin(
180◦− 30◦)
=
T2 sin(
180◦− 20◦)
∴100[
kg]
× 9.81[
m/s2]
sin 50◦=
T1[
N]
sin 150◦=
T2[
N]
sin 160◦ よって T1=
100× 9.81 × sin 150◦ sin 50◦=
640[
N]
T2=
100× 9.81 × sin 160◦ sin 50◦=
437.9; 440[
N]
Ans. T1=
640 N, T2=
440 N 1・2 質量 50 kgの物体に水平に力を加えて,30◦のなめらかな斜面を押し上げるにはどれだけの力が必要 か. 物体に水平に力を加えてつり合いの状態を考える.質量m=
50 kg,垂直抗力をN,加える力をF とす ると,Lamiの定理より mg sin(
30◦+
90◦)
=
N sin 90◦=
F sin(
180◦− 30◦)
∴50[
kg]
× 9.81[
m/s2]
sin 120◦=
N[
N]
sin 90◦=
F[
N]
sin 150◦ よってN
=
50× 9.81 × sin 90 ◦ sin 120◦=
566; 570[
N]
F=
50× 9.81 ×sin 150 ◦ sin 120◦=
283; 280[
N]
Ans. 280 N 1・3 図1・39のようにレバーの先端に150 Nの力を加えると,基部にどれだ けのモーメントを生じるか. 基部を原点とし,鉛直方向にy軸,水平方向右にx軸をとる. Aの位置をA(
x,y)
とすると x=
0.45[
m]
cos 30◦ y=
0.2[
m] +
0.45[
m]
sin 30◦ 先端に加える力とx軸のなす角は60◦− 30◦=
30◦なので,F=
150 Nとすると Fy=
150 sin 30◦ Fx=
−150 cos 30◦ よってモーメントMは M=
Fyx− Fxy=
150 sin 30◦· 0.45 cos 30◦−(
−150 cos 30◦)
·(
0.2+
0.45 sin 30◦)
=
29.2+
55.2=
84.4; 84[
N· m]
Ans. 84 N 1・4 図1・40のようにスパナで六角ボルトを締め付けたい.ボルトの 中心線よりlの点にF の力を加えると,六角ボルトとスパナの接 触点いくらの力Pが働くか. 力F によるモーメントMはM
=
Fl 偶力Pによるモーメントは図のようにボルトの面の力の角θをとると, 偶力PによるモーメントM′は M′=
P cosθ · b 2 × 2+
P sinθ b 2√3 × 2 ここでスパナとボルトの接触からθ=
90◦と考えれば M′=
P· 0 · b+
P· 1 · √b 3=
P· √b 3 M=
M′より Fl=
P· √b 3 ∴ P=
√ 3Fl b Ans. P=
√ 3Fl b 1・5 図1・41に示す円板のA, Bに90 Nの力と,P点に300 Nの力が作 用するとき,合力の着力点は直径AB上のどこにあるか. 合力の着力点はP点に作用する力をO点に移動させて,AB上で モーメントのつり合いが成立する点と考えればよい.着力点をCとし, OからBの方向へx mの位置とする.C点のまわりのモーメントの つり合いから −90[
N]
·(
x+
0.5)[
m] +
300[
N]
· x[
m]
− 90[
N]
·(
0.5− x) [
m] =
0 −90x − 45+
300x− 45+
90x=
0 300x=
90 ∴ x=
0.3 Ans. OからBの方向へ30 cmの位置1・6 図1.42にしえmす中央に質量mの物体を載せた長さ lの軽い台車の一端が水平面上,他端が30◦の傾きを もつ斜面上にあるとき,台車に水平とある角度θを持 たせるためには台車にどれだけの力を加えればよい か.水平面と斜面の摩擦を無視して計算せよ. 水平面の垂直抗力をN1,斜面の垂直抗力を N2,重力加速度をgとする.鉛直方向の力のつり合いより N1− mg
+
N2cos 30◦=
0 (1) 水平方向の力のつり合いより F− N2sin 30◦=
0 (2) (2)より N2=
F sin 30◦ これを(1)へ代入すると N1− mg+
F cos 30◦ sin 30◦=
0 N1− mg+
F 1 tan 30◦=
0 ∴ N1− mg+
F· √ 3=
0 (3) 斜面の接点まわりのモーメントのつり合いより mg cos θ · l 2+
F sinθ · l − N1cosθ · l=
0 ∴ mg 2 l+
F sinθ cosθl− N1l=
0 ∴ mg 2+
F tanθ − N1=
0 ∴ N1=
mg 2+
F tanθ (4) (4)を(3)へ代入して mg 2+
F tanθ − mg+
F· √ 3=
0 F(tanθ+
√3)− mg 2=
0 F(tanθ+
√3)=
mg 2 ∴ F=
mg 2(tanθ+
√3)Ans. F
=
mg 2(tanθ+
√3) 1・7 図1・43に示す滑車で質量mの物体を引き上げるためには, いくらの力が必要か.滑車の軸はなめらかで摩擦が働かない ものとして計算せよ. (a) ロープの端を力T で引張って静止しているとする. また,図のようにT1, T2, T3を定める.動滑車に着目すると, 力のつり合いから T1+
T2− mg=
0 動滑車が回転しない条件から T1=
T2 ∴ T1=
T2=
mg 2 ∴ 2T2=
mg (1) ∵動滑車の中心まわりのモーメントのつりあいから,動滑車の半径をrとすると −T1r+
rT2=
0 ∴ −T1+
T2=
0 ∴ T1=
T2 張力のつり合いから T2− T3=
0 ∴ T2=
T3 (2) 定滑車が回転しない条件から T3=
T (3) よって(1)より 2T2− mg=
0 2T3− mg=
0(
∵ (2))
2T− mg=
0(
∵ (3))
∴ T=
mg 2(b) 図のようにT1, · · · , T6 を定める.動滑車について,力の釣り合いより T2
+
T3+
T6− mg=
0 (1) 回転しない条件より T2=
T6 (2) 定滑車が回転しない条件より T1=
T (3) T4=
T5 (4) また,張力のつり合いより T1− T2=
0 ∴ T2=
T1 (5) −T4+
T3=
0 ∴ T3=
T4 (6) −T5+
T6=
0 ∴ T6=
T5 (7) よって(1)より 2T2+
T3− mg=
0(
∵ (2))
2T2+
T6− mg=
0(
∵ (6), (4)よりT3=
T6)
∴ 2T2+
T2− mg=
0 ∴ 3T2− mg=
0 ∴ 3T − mg=
0(
∵ (5), (3))
∴ T=
mg 3 Ans. (a): T=
mg 2 , (b): T=
mg 3 1・8 図1・44のように,一端が回転支持され,他端がロープで支 えられた軽いはりに二つの力が働いている.ロープが水平と 30◦ の角をなすとき,支点における反力とロープの張力の大 きさはいくらか.このはりと力は図1・33と同じである.ど ちらの方法が力が少なくてすむか.支点の反力をR,ロープの張力をT とする.また,反力Rと はりのなす角をθとする.鉛直方向の力のつり合いより R sinθ − 800
[
N]
− 1200[
N] +
T sin 30◦=
0 R sinθ − 2000+
1 2T=
0 (1) 水平方向の力のつり合いより R cosθ − T cos 30◦=
0 R cosθ − √ 3 2 T=
0 (2) 支点まわりのモーメントのつり合いより −800[
N]
· 0.25[
m]
− 1200[
N]
·(
0.25+
0.35) [
m] +
T sin 30◦[
N]
·(
0.25+
0.35+
0.4) [
m] =
0 ∴ −200 − 720+
1 2T· 1=
0 ∴ 1 2T=
920 ∴ T=
1840[
N]
(1)より R sinθ=
2000− 1 2T=
2000− 920=
1080; 1100[
N]
(2)より R cosθ=
√ 3 2 T=
√ 3 2 · 1840=
1593; 1600[
N]
また R=
√ R2sin2θ+
R2cos2θ=
√10802+
15932=
1924; 1900[
N]
θは tanθ=
R sinθ R cosθ=
1080 1593 ∴ θ=
tan−1 1080 1593=
34◦ 例題1・11と比較して R sinθ=
RA, T > RBAns. T
=
1.8 kN, R=
1.9 kN 1・9 図1・45に示すはりの左端に大きさ500 Nの力を加えるとき,こ のはりが支点から離れないためには右端にどんな力を加えればよ いか. A, Bでの反力をRA, RBとする.力のつり合いより −500+
RA+
RB− F=
0 (1) A点まわりのモーメントのつり合いより 500[
N]
· 0.3[
m] +
RB[
N]
· 0.35[
m]
− F[
N]
· 0.32[
m] =
0 ∴ 150+
0.35RB− 0.55F=
0 0.35RB=
150+
0.55F ∴ RB=
−428+
1.57F (2) B点まわりのモーメントのつり合いより 500[
N]
·(
0.3+
0.35) [
m]
− RA[
N]
· 0.35[
m]
− F[
N]
· 0.2[
m] =
0 ∴ 500 · 0.65 − 0.35RA− 0.2F=
0 0.35RA=
325− 0.2F ∴ RA=
928− 0.27F (3) F がある力より弱いとB点で支点から離れ,ある力より強いとA点で支点から離れる.その範囲のF を求 める.RBとして(3)を(1)へ代入すると −500+
928− 0.57F+
0− F=
0 ∴ −1.57F=
−428 ∴ F=
272.6; 273[
N]
RA=
0として(2)を(1)へ代入すると −500+
0− 428+
1.57F− F=
0 ∴ 0.57F=
928 ∴ F=
1628[
N]
Ans. F
=
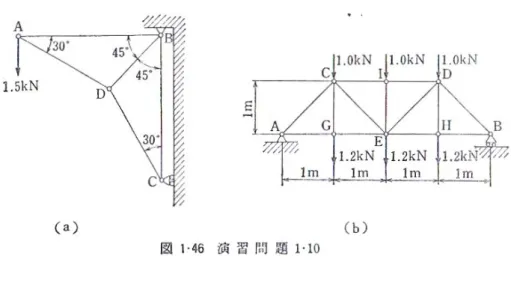
273 Nから1328 N1・10
図1・46に示すトラスの各部
に生じる力を求めよ.