YUKIHIKONAKATA,NAOYUKIYATSUDA,ANDEMIKO ISHIWATA
ABSTRACT. We considerlinearisedstability of nonlinear differenceequationsby investi-gatinglocation ofrootsof theassociated characteristicequations.Thecharacteristic
equa-tion is givenas apolynomialequationwith the order determinedby the delayin the dif-ference equation. Forsomepolynomialequationswevisualiseallthe sets ofcoefficients
suchthat allthe rootslocate inside the unit circle in the complex plane. The information
canbetranslatedtounderstand stability of the nonlinear difference equation intermsofits
original parameters. We presentsomeexamples that delay in thedifferenceequationcan
stabilise the equilibrium of theequation.
1. INTRODUCTION: DELAY INDIFFERENCEEQUATIONS
Let$f$be
a
mapping from$\mathbb{R}$to$\mathbb{R}$.
Inthepaper
[12] the authors considera
differenceequation with
one
single delayina
form(1.1) $x_{n+1}=x_{n}f(x_{n-k}) , n\in \mathbb{N}+,$
where$k\geq 1$ is
a
positiveinteger. initial conditionsare
givenas a
sequence $(x_{0},x_{-1}, \ldots,x_{-k})=(p_{0},p_{1}\ldots,p_{k})\in \mathbb{R}^{k+1}.$One
can
then compute$x_{1}=p_{0}f(p_{k})$ and recursively construct the solution (as longas
thesolution exists in the domain of$f$). Theequilibriumof(1.1) is givenas a
rootof the equation$1=f(x)$
.
Wedenote theequilibriumby$x^{*}$ assuming that itexists. If$f$is
a
differentiablefunction(atleastaroundtheequilibrium),
one
can
linearise equation(1.1)aroundtheequilibrium$x^{*}$ toget
a
linear difference equation:(1.2) $y_{n+1}=f(x^{*})y_{n}+x^{*}f’(x^{*})y_{n-k}=y_{n}+x^{*}f’(x^{*})y_{n-k}.$
Thelinearisedequation (1.2)leads to thefollowing characteristic equation:
(1.3) $\lambda^{k+1}=\lambda^{k}+x^{*}f’(x^{*})$,
which is
a
polynomial equation ofthe $(k+1)$-thorder. It is known that the equilibrium isasymptotically stable if all therootsof the equation(1.3)locate inside theunitcircle in thecomplex plane(i.e., all thezeros
of(1.3)havetheirmagnitude less thanone). Werefer[6, 10]
as
general references forthestability theory of difference equations. Tobeconcrete, letus
set$f(x)=\exp\{r(1-x)\}, x\in \mathbb{R}+,$
where$r>0$
.
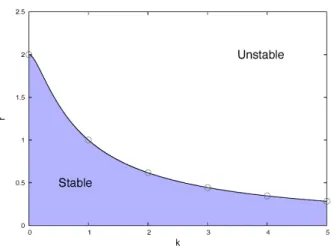
Then equation(1.1)becomes the logistic equationFIGURE 1.1. Stability region fortheequilibrium of(1.4). Astable equi-librium
can
become unstableas
$k$increases.
We refer[10, 12,2]for the biologicalmotivationfor thedifferenceequation(1.4). One
can
easily
see
that theequation (1.4)has the equilibrium$x^{*}=1$
andthatlinearisationleadstothefollowing characteristic equation:
$\lambda^{k+1}=\lambda^{k}-r.$
In [12]it isshown that theequilibriumisasymptotically stableif
$r<2 \cos\frac{k\pi}{(2k+1)}$
anditis unstable if the
converse
inequality holds. Since the stable equilibrium becomes unstableas
theparameterof delay$k$increases,see
Figure 1.1, the resultderivesclich\’ethat delayednegative feedback induces instability.
Does the delayalwaysdestabilise difference equations? Let
us
consider the following differenceequation(1.5) $x_{n+1}=x_{n}\exp[r\{1-\alpha x_{n}-(1-\alpha)x_{n-1}\}],$
where $\alpha\in[0$,1$]$
.
Stabilityof theequilibrium of(1.5)was
studiedin [14, 2]. Here,using
(1.5)
as an
example,we
would hketoillustrateour
approachfor stability analysis ofnon-linear difference equation. Step oftheanalysis is analoguetothe
one
proposedin [4, 3],where theauthorsstudy transcendental equations which
are
derived fromcontinuousdelay equations describing population dynamics.For(1.5) the characteristic equation, associated to theequilibrium$x^{*}=1$, becomes
a
quadratic polynomial equation:
(1.6) $\lambda^{2}+a\lambda+b=0$
where
(1.7a) $a=r\alpha-1,$
to thecontinuity oftherootswith respect to thecoefficients $(a,b)$
.
Onecan
immediatelysee
that if(1.8) $1+a+b=0$
holds,thenequation(1.6)has
a
root$\lambda=1$whileif(1.9) $1-a+b=0$
holds, then(1.6) has
a
root $\lambda=-1$.
Those conditionscan
be visualisedas
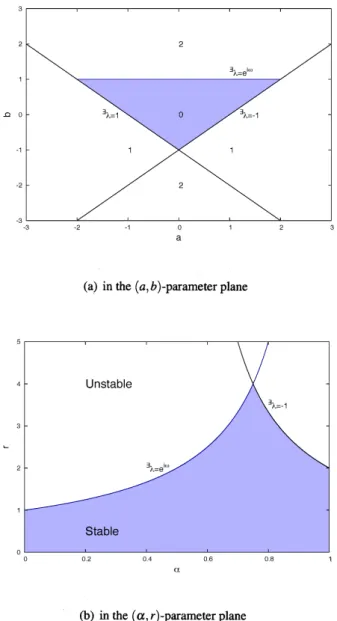
two lines in the $(a,b)$-parameterplane that forma
partof stabilityboundariesin the $(a,b)$-parameterplane,
see
Figure 1.2(a).Equation (1.6) of
course
could havea
conjugate pair ofcomplexroots with $|\lambda|=1.$ Suppose that$\lambda=e^{i\omega}=\cos\omega+i\sin\omega,$ $\omega\in(0, \pi)$ solves equation(1.6). We getthefol-lowingtwoequations
(1.10a) $0=\cos 2\omega+a\cos\omega+b,$
(1.10b) $0=\sin 2\omega+a\sin\omega.$
Theseequations(1.10)
can
be easily solved withrespect to $(a,b)$as
(1.11) $(\begin{array}{l}ab\end{array})=(\begin{array}{l}-2cos\omega 1\end{array}), \omega\in(0, \pi)$
.
Theequality(1.11)definesaparametriclineby$\omega$inthe$(a,b)$-plane, which
one
can
easilyplot. Alongtheparametricline givenby (1.11),thecharacteristic equation(1.6)has
a
root $\lambda=e^{i\omega}$(andalso$\lambda=e^{-j\omega}$), see againFigure 1.2(a).
Now the $(a,b)$-parameter planeisdecomposedinto
some
regionsby those threelines, wherethe characteristicequation
(1.6) hasa
rootwith $|\lambda|=1$.
Todetermne the stabilityregion, ineachpoint in the$(a,b)$-parameter plane,
one
shouldcount the numberofroots that locate inside/outsidethe unitcircle in $\mathbb{C}$.
In general thiscan
be done by applyingRouch\’e’s theorem
as
in [5]. Forequation (1.6), however,one can
easily verify that the number locating outside theunitcircle in$\mathbb{C}$as
in Figure 1.2(a)byelementary calculations.See also Theorem 1.$3.4in$Chapter1 in[10]for
an
explicit stability condition derived ina
differentwayapplying the
Schur-Cohn
criterion.Finally let
us
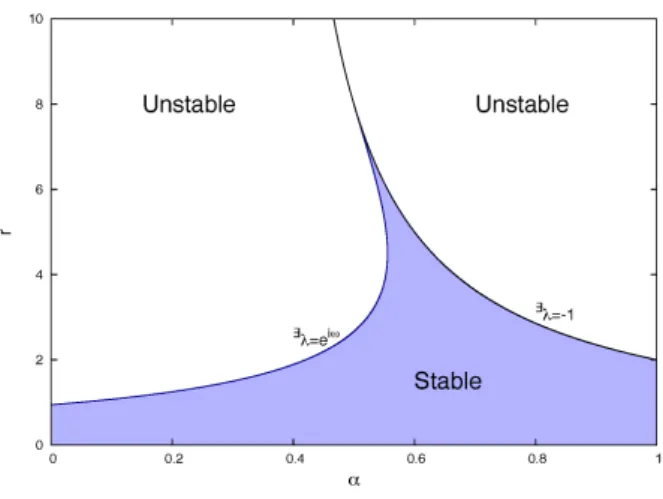
interpret the stability region depictedin Figure 1.2 (a) in terms oftheoriginal parameters $(r, \alpha)$ in (1.5). Accordingto (1.7)one canseethat (1.8) amounts to
that$r=0$holds,where thecharacteristic equationhas
a
root$\lambda=1$,andthat(1.9)amountsto
$r= \frac{2}{2\alpha-1},$
where thecharacteristic equationhas
a
root$\lambda=-1$.
Theinverse mapping of(1.7)is$r=a+b+1,$
$\alpha=\underline{a+1}$ $a+b+1^{\cdot}$
$D$ $O$
$33$
$0$
$a$
(a) in the$(a,b)$-parameterplane
$0$
$0$ 02 04 06 os
(b) in the$(\alpha,r)$-parameterplane
FIGURE 1.2. Stabilityregion for the characteristic equation(1.4).In(a)
thenumber ofrootsthat locateoutsidetheunitcirclein$\mathbb{C}$isdepicted.
Thenoneobtainsthefollowing
curve
correspondingto(1.11)$(\begin{array}{l}r\alpha\end{array})=(\begin{array}{ll}2-2c\circ s \omega\frac{1-2cos\omega}{2-2cos\omega} \end{array}), \omega\in(0, \pi)$,
which
can
be explicitlyexpressedas
$r= \frac{1}{1-\alpha}.$
Therefore
as
in Figure1.2(b)we
can
deduce the stability region forthepositive equilibrium of(1.5) inthe $(r, \alpha)$-parameterplane. Figure 1.2 (b) shows that stability threshold for $r$In this section
we
would likeOurmotivation
comes
from stability analysis of the logisticequationwith multiple delays: (2.1) $x_{n+1}=x_{n}\exp[r\{1-\alpha x_{n}-\beta x_{n-j}-(1-\alpha-\beta)x_{n-k}\}],$where
$r>0, \alpha\geq 0, \beta\geq 0, \alpha+\beta\leq 1$
and$k$and$j$
are
integers such that$k>j.$Onecaneasily
see
thatequation (2.1)has thepositive equilibrium$x^{*}=1$.
Thecharac-teristic equationfor thepositiveequilibrium$x^{*}=1$ iscomputed
as
(2.2) $\lambda^{k+1}+a\lambda^{k}+b\lambda^{k-j}+c=0,$ where
(2.3a) $a=r\alpha-1,$
(2.3b) $b=r\beta,$
(2.3c) $c=r(1-\alpha-\beta)$
.
To
see
if all therootsof thepolynomial equation(2.2)lieinside theunitcirclein$\mathbb{C}$,
one
could apply the Schur-Cohn criterion [10]. The direct applicationhowever
may
requirelengthycalculationstoobtainconcreteconditions intermsofparameters,whichwould be ofinterestin thecontextof applicationstobiologicalmodels.
Thecharacteristic equation (2.2)has aquite general form including cases previously studiedinthe literature. For example, (2.2)with $b=0$$(or c=0)$is studied in the famous
paper
[11]. Recently, in thepaper
[1] the authors formulatedan
explicit stabilitycondi-tionfor(2.2)with $j=k-1$, applyingtheSchur-Cohn
criterion.
Proving contractivity ofthe solution for the nonlinear equation (2.1) involves
a
lot ofcomputations and derives sufficient conditions fortheglobal stability of the equilibrium,see
[13, 16, 15].Consider thepolynomial equation(2.2) inthe $(a,b,c)$-coefficientspace (insteadof the
plane as in Section 1). We make drastic simplification by assuming that $j=1$ holds,
whichavoids technical detail but shows interesting stability boundaries. Our firstaimisto
characterise the region
$D:=$
{
$(a,b,c)\in \mathbb{R}^{3}$:
Every root of(2.2)locates inside theunitcirclein$\mathbb{C}$}.
Define
$L_{1}$ $:=$
{
$(a,b,c)\in \mathbb{R}^{3}$ : (2.2)has aroot$\lambda=1$},
$L_{-1}$ $:=$
{
$(a,b,c)\in \mathbb{R}^{3}$:
(2.2)hasa
root$\lambda=-1$}.
Onecan
immediatelysee
that$L_{1}$ and$L_{-1}$ respectivelyformplanes:$L_{1}=\{(a,b,c)\in \mathbb{R}^{3}:1+a+b+c=0\},$
$L_{-1}=\{(a,b,c)\in \mathbb{R}^{3}$
:
$(-1)^{k+1}+a(-1)^{k}+b(-1)^{k-1}+c=0\}.$We
are
nowinterested in$C:=$
{
$(a,b,c)\in \mathbb{R}^{3}$ :(2.2)hasa
conjugate pair of complexrootswith $|\lambda|=1$Now let
us
introducea
sufficient condition for thatevery
root locate “outside” the unit circlein$\mathbb{C}$,i.e.,
no
rootsin insidetheunit circle in$\mathbb{C}$.
Thefollowing result
can
be easilyprovenbyusingthe
fundamental
theorem of algebra. Weomitthe proof.Lemma
1.
Letusassume
$that|c|\geq 1$ holds. Thenequation (2.2)hasarootwith $|\lambda|\geq 1$for
any$(a, b)\in \mathbb{R}^{2}.$Thus, tofind the stability region,
we
can
restrictour
attentionto$c\in(-1,1)$.
Weintro-ducethefollowingresult.
Theorem2. Equation(2.2)hasaconjugatepair
of
complexroots$\lambda=e^{\pm i\omega},$ $\omega\in(0, \pi)$if
andonly
if
(2.4) $(\begin{array}{l}ab\end{array})=-\frac{1}{\sin\omega}(-c\sin((k-1)\omega)+\sin(2\omega)c\sin(k\omega)-\sin\omega) , \omega\in(0, \pi)$
holds.
Proof
Letussubstitute$\lambda=e^{i\omega},$ $\omega\in(0, \pi)$ into(2.2). Wethenget$0=\cos((k+1)\omega)+a\cos(k\omega)+b\cos((k-1)\omega)+c,$
$0=\sin((k+1)\omega)+a\sin(k\omega)+b\sin((k-1)\omega)$.
Then
one can
getthe conclusion by solvingthe twoequations withrespectto$a$and$b.$ $\square$Then
we
haveingredientstoplot the stability boundary for given$k$.
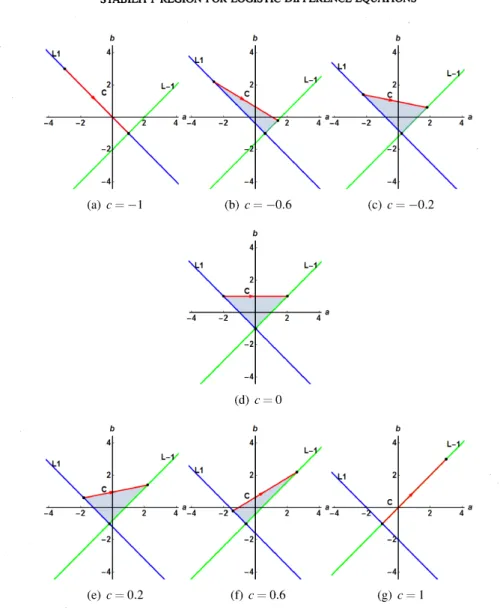
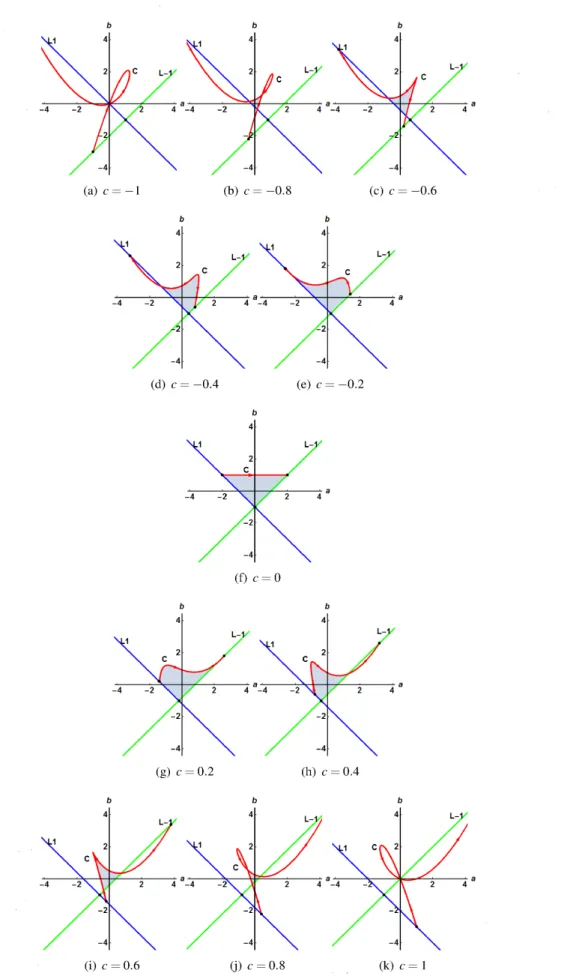
Wepresent$L_{1},$ $L_{-1}$and $C$ for several $c\in[-1, 1]$ fixing $k$,
see
Figure 2.1 where$k=2$ andFigure2.2 where
$k=4$
.
The colored region is the exact stability region, whichcan
be detected by theapplication of theRouch\’e’s theorem (we omit the detail,
see
again [5, 3] for theuse
oftheRouch\’e’s theoremtodetermine the stabilityregion). InbothFigures2.1 and2.2
one
can
see
that the stabilityregion disappearsas
$c$becomes $\pm 1$,cf. Lemma 1. When$k=4,$ thecharacteristicequation has degree 5and the stabilityboundaryintersectsitself,
see
thecase
that$c=\pm 0.8$ holds. The stability boundary thatintersectsitselfseems
tobeone
oftheinterestingproperties of the differenceequation withtwo delays, cf. [9].
One
couldof
course
visualise the stability region in the $(a,b,c)$-spaceas a
three-dimensionalobject,which could also beinformativetoobserve the fullstructureof the stability region. What
can
we
now
say about stability of the equation (2.1)? Toanswer
the questionwe
interpretthe obtained stabilityregion inthe$(a,b,c)$-space usingthemapping(2.3)andformthestability regionintheoriginalparameter space: $(r, \alpha,\beta)$
.
Herewedo notgiveadetailed analysis, but
we
would liketoshow that the stability threshold for$r$can
be largerthan the
one
obtainedfor theequation(2.1)in Section 1.Let$k=2$and
we
simphfy the equation(2.1)byassumingthat$\beta=\frac{3}{4}(1-\alpha)$
holds. Now equation(2.1)hastwo parameters: $(r, \alpha)$
.
Themapping(2.3)becomes(2.5a) $a=r\alpha-1,$
(2.5b) $b= \frac{3}{4}r(1-\alpha)$, (2.5c) $c= \frac{1}{4}r(1-\alpha)$
.
(d)$c=0$
FIGURE 2.1. Stability region for the characteristic equation (2.2) with
$k=2.$
Corollary
3.
Equation(2.2) hasa
conjugate pairof
complexroots $\lambda=e^{\pm i\omega},$ $\omega\in(0, \pi)$if
and onlyif
(2.6) $(\begin{array}{l}r\alpha\end{array})=(1-\frac{4^{1-}}{3+2c\circ s\omega}(1-2\cos\frac{\omega_{5}}{3+2\cos\omega})^{-1}2\cos\omega+\frac{5}{3+2cos,\omega+}) , \omega\in(0, \pi)$
holds.
Proof
For$k=2$theset$C$can
berepresented by$(\begin{array}{l}ab\end{array})=(\begin{array}{l}c-2cos\omega-2ccos\omega+1\end{array}) \omega\in(0, \pi)$
.
Using(2.5)
one
hasFIGURE 2.2. Stabilityregion for thecharacteristic equation(2.2) with $k=4$
.
When$c=\pm 0.8$thecurve
thatrepresents$C$intersectsitself.$0_{0} 02 04 06 08$
FIGURE 2.3. Stabilityregionfor the equilibrium of(2.1) in the $(\alpha,r)-$
parameterplane. Two
curves
meet atthepoint $( \frac{1}{2},8)$.
We
now
solve thetwoequations withrespect to$r$and $\alpha$.
From the secondequationwe
get$r(1- \alpha)=\frac{1}{\frac{3}{4}+z^{\cos\omega}1}=\frac{4}{3+2\cos\omega}rightarrow r\alpha=r-\frac{4}{3+2\cos\omega}.$
From the first equation it follows
$r \alpha=\frac{4}{5}+\frac{1}{5}r-\frac{8}{5}\cos\omega.$
From those equations
one
obtain the expression for $r$as
in (2.6). Thenone can
get theexpressionfor$\alpha.$
$\square$
It
can
beeasilyseen
thatequation(2.2)hasa
root$\lambda=-1$ when$r= \frac{4}{3\alpha-1}.$
InFigure2.3
we
plotthosecurves.
Onecan
compute that the parametriccurve
given by(2.6) starts $at$ thepoint $(0,4/(2+\sqrt{5}))$ and ends atthe point $( \frac{1}{2},8)$
.
From the shapeofthe
curve
one
can
increase $r$so
thata
stable equilibriumbecomes unstable and thenagain becomes stable, for
some
$\alpha(<\frac{1}{2})$.
As in Figure1.2
(b)an
unstable equilibriumcan
become stableas
$\alpha$ decreases from 1 to around0.6
(if$r$ is less than 8). The shapeof the stability boundary shows that delayinthenonlineardifferenceequationindeed.can
contributeto stability of the equilibrium, differently from what
one
could expect in the difference equation withone
singledelayin Section 1.Acknowledgement. Thispaper
was
written during the first author’s stayattheBolyaiIn-stitute ofthe University of Szeged inJanuary 2015. The first author thanksRobert Vajda for stimulus discussion forcharacterisation of the stability boundary, which will be
pre-sented elsewhere. The first author is grateful toYoshiaki Muroyaforintroductionofthe
research
area.
$YN$was
supportedby byJSPSFellows,No.268448ofJapanSociety for theREFERENCES
[1] J. \v{C}erm\’ak, J. Jdnsk\’y,P. Kundr\’at, On necessaryandsufficient conditions forthe asymptotlcstability of higher orderlinear differenceequations, J. Diff. Eq. Appl.,18(2012)1781-1800
[2] E.E.Crone,Delayed density dependence and the stability of interacting populations and sub-populations, Theo. Pop.Bio.,51(1997)67-76
[3] O.Diekmann,Ph.Getto,y.Nakata,On the characteristic equation$\lambda=\alpha_{1}+(\alpha_{2}+\alpha_{3}\lambda)e^{-\lambda}$and itsusein
the context ofacellpopulationmodel(submitted)
[4] O.Diekmann,K.Korvasova,Adidacticalnoteonthe advantageof using twoparametersin Hopfbifurcation
studies, J. Biol. Dyn.7Supplement1(2013)21-30
[5] O.Diekmann,S.A.vanGils,S.M.V.Lunel,H.O. Walther, Delay EquationsFunctional,Complex and Non-linear Analysis, Springer Verlag(1995)
[6] S.N. Elaydi, An IntroductiontoDifferenceEquations.ThirdEdition,Undergraduate Texts inMathematics, Springer(2005)
[7] M.M. Kipnis, D.A.Komissarova, A noteonexplicit stability conditions for autonomous higherorder dif-ference equations, J.Diff. Eq.Appl. 13(5)(2007)457-461.
[8] M.M. Kipnis,I.S.Levitskaya, Stability of delay dfferenceanddifferential equations: similaritiesand dis-tinctions,DifferenceEquations,SpecialFunctions and Orthogonal Polynomials(2005)315-324.
[9] M.M. Kipms,R.M.Nigmatulin, Stability of thetrinomial linear differenceequationswithtwo delays, Au-tom.and Remote Contro165(2004)1710-1723
[10] V.L. Kocic,G.Ladas,Global Behavior of NonlinearDifferenceEquations of HigherOrderwith Applica-tions,Math. Appl., 256, KluwerAcademic,Dordrecht(1993)
[11] S.A.Kurukdis,The asymptotic stability of$x_{n+1}-ax_{n}+bx_{n-k}=0$,J. Math. Anal. Appl.,188(1994)719-731. [12] S.A. Levin,R.M.May,A noteon difference-delayequations, Theor. Pop.Biol.,9(1976)178-187. [13] Y.Nakata, Global asymptotic stability beyond 3/2typestability fora logistic equation with piecewise
constantarguments,NonlinearAnal. TMA73(2010)3179-3194
[14] G.Seifert,Certainsystemswithpiecewise constantfeedback controls withatimedelay,DifferentialIntegral Equations,6(1993)937-947
[15] J.W.H. So, J.S.Yu, Global stability inalogistic equationwithpiecewise constantarguments, Hokkaido Math.J.,24(1995)269-286
[16] K. Uesugi,YMuroya,E.Ishiwata,Ontheglobalattractivity foralogisticequationwithpiece-wise constant arguments,J.Math.Anal. Appl.,294(2004)560-580
$E$-mail address: [email protected]
(Y.NAKATA)GRADUATE SCHOOLOFMATHEMATICALSCIENCES,THE UNIVERSITYOFTOKYO,3-8-1
KOMABAMEGURO-KU,TOKYO 153-8914, JAPAN
(N. YATSUDA, E.ISHIWATA)DEPARTMENTOFMATHEMATICAL INFORMATIONSCIENCE,TOKYO