(a) (b) Fig.4. Resultsofsmoothing Fig.I(a), (b)using the maximal neighborhood of each
pointas anaveraging neighborhood.
(a)
5, IA.
Ir
(b)
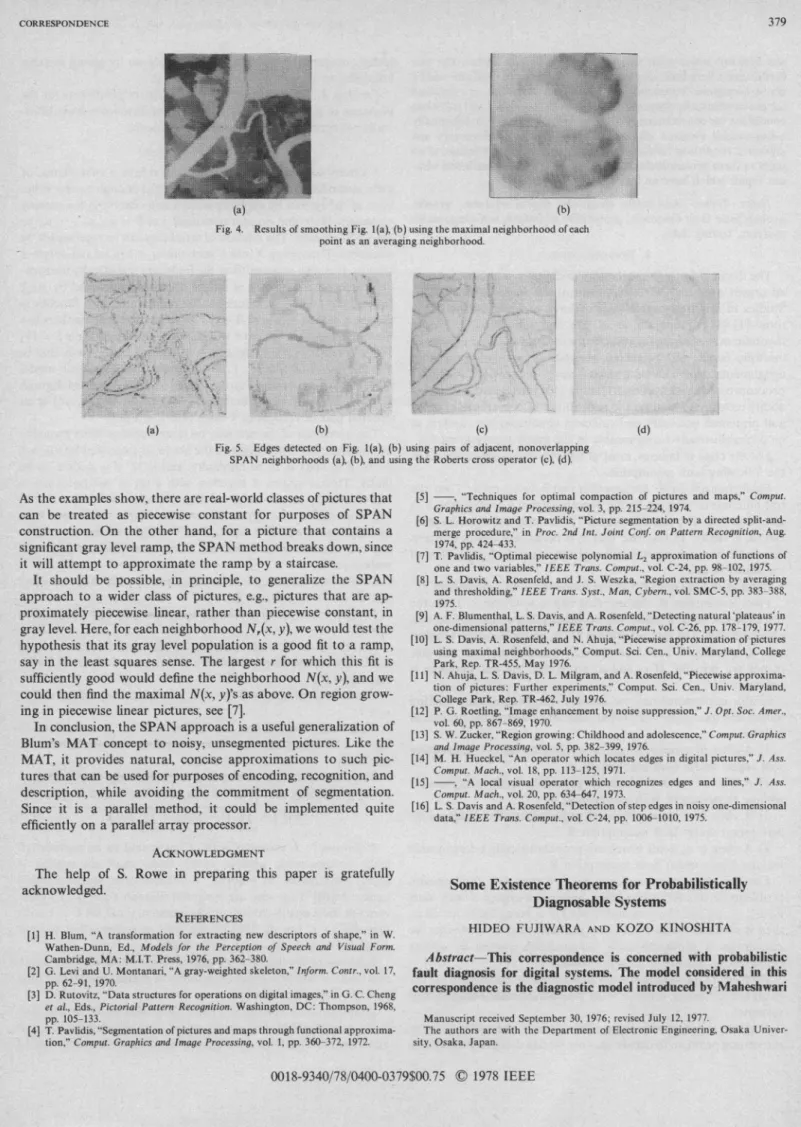
Fig. 5. Edges detectedon Fig. 1(a), (b) SPANneighborhoods (a) (b),and usin
As theexamnples show,there arereal-world classesofpictures that can be treated as piecewise constant for purposes of SPAN construction. On the other hand, for a picture that contains a significantgraylevelramp,theSPANmethod breaks down,since it will attempt to approximate therampbyastaircase.
It should be possible, in principle, to generalize the SPAN approach toa wider class ofpictures, e.g., pictures thatare ap- proximately piecewise linear, rather than piecewise constant, in graylevel. Here, for each neighborhood N,(x, y),wewouldtest the hypothesis that itsgray levelpopulation isagood fit to aramp, say in the leastsquares sense.The largest rfor which this fit is sufficiently good would define the neighborhood N(x, y), andwe couldthen find the maximal N(x, y)'sasabove.On regiongrow- ing in piecewise linear pictures,see[7].
In conclusion, the SPAN approach isausefulgeneralization of Blum's MAT concept to noisy, unsegmented pictures. Like the MAT, it provides natural, concise approximations to such pic- turesthatcanbe used forpurposesof encoding, recognition, and description, while avoiding the commitment of segmentation. Since it is a parallel method, it could be implemented quite efficientlyon aparallel arrayprocessor.
(C) (d)
using pairsofadjacent, nonoverlapping
gtheRobertscrossoperator
(cd
(d)[5] -,"Techniques for optimal compaction ofpictures andmaps," Comput. Graphics and Image Processing, vol. 3,pp.215-224,1974.
[6] S.L.Horowitzand T.Pavfidis,"Picturesegmentationbyadirectedsplit-and-
mergeprocedure," inProc. 2nd Int. JointConfonPatternRecognition, Aug 1974,pp.424-433.
[7] T.Pavlidis, "Optimal piecewise polynomialL2approximationof functionsof
oneandtwovariables,"IEEE Trans.Comput.,vol.C-24,pp.98-102,1975. [8] LS.Davis,A.Rosenfeld, andJ. S.Weszka,"Regionextractionby averaging
andthresholding."IEEE Trans.Syst., Man, Cybern.,vol.SMC-5,pp.383-388, 1975.
[9] A. F.Blumenthal, L S. Davis, and A. Rosenfeld, "Detecting natural 'plateaus' in one-dimensional patterns," IEEE Trans. Comput., vol. C-26,pp.178-179, 1977. [10] L. S. Davis, A. Rosenfeld, and N. Ahuja, "Piecewise approximation of pictures using maximal neighborhoods," Comput. Sci. Cen., Univ. Maryland, College Park, Rep. TR-455, May 1976.
[11] N. Ahuja, L. S. Davis, D. L. Milgram, and A. Rosenfeld, "Piecewise approxima- tion of pictures: Further experiments," Comput. Sci. Cen., Univ. Maryland, College Park, Rep. TR-462, July 1976.
[12] P. G. Roething. "Image enhancement by noise suppression," J. Opt. Soc. Amer., vol. 60,pp.867-869, 1970.
[13] S. W. Zucker, "Region growing: Childhood and adolescence," Comput. Graphics andImage Processing, vol. 5,pp.382-399, 1976.
[14] M. H. Hueckel, "Anoperatorwhich locates edges in digital pictures," J. Ass. Comput.Mach., vol. 18,pp.113-125, 1971.
[15]-, "A local visual operator which recognizes edges and lines," J. Ass. Comput. Mach., vol. 20,pp.634-647, 1973.
[16] L. S. Davis and A. Rosenfeld, "Detection ofstepedges in noisy one-dimensional data," IEEE Trans. Comput., vol. C-24,pp. 1006-1010,1975.
ACKNOWLEDGMENT
The help of S. Rowe in preparing this paper is gratefully
acknowledged.
REFERENCES
[I] H. Blum,"Atransformation forextractingnewdescriptorsofshape,"in W. Wathen-Dunn, Ed., Models for the Perception of Speechand Visual Form.
Cambridge, MA: M.I.T. Press, 1976,pp.362-380.
[2] G. Levi andU.Montanari,"Agray-weighted skeleton," Inform. Contr.,vol.17,
pp.62-91, 1970.
[3] D. Rutovitz, "Datastructuresfor operationsondigital images,"in G.C.Cheng
etal.,Eds., PictorialPattern Recognition. Washington, DC: Thompson, 1968,
pp.105-133.
[4]T.Pavldis, "Segmentationofpicturesandmapsthrough functional approxima- tion," Comput. Graphics andImageProcessing,vol. 1,pp.360-372, 1972.
Some Existence Theorems for Probabilistically
Diagnosable Systems
HIDEO FUJIWARA AND KOZO KINOSHITA
Abstract-This correspondence is concerned with probabilistic fault diagnosis for digitalsystems. The model considered in this correspondence is thediagnostic model introduced by Maheshwari
ManuscriptreceivedSeptember 30, 1976;revised July 12, 1977.
The authorsarewith the Department ofElectronicEngineering,Osaka Univer- sity, Osaka, Japan.
0018-9340/78/0400-0379$00.75 ( 1978 IEEE
CORRESPONDENCE
and Hakimi where each unithas aprobability offailure.For this model under both fault assumptions byMaheshwari-Hakimiand by Barsi-Grandoni-Maestrini, someexistence theoremsare obtained forprobabilistically diagnosablesystems.1)Necessary and sufficient conditions for theexistenceoftestinglinkstoformprobabilistically t-diagnosable systems with and without repair.2) Necessary and sufficient conditions for the existence ofprobabilitiesof failure of all units to formprobabilistically t-diagnosablesystemswith and with- outrepair which havenohardcore.
Index Terms-Automatic diagnosis, digital systems, graphs, probabilistic faultdiagnosis, probability offailure, self-diagnosable systems,testinglinks.
I. INTRODUCTION
Thedemand for high availabilityindigitalsystems has created an urgent need for the development ofself-diagnosable systems. Studies in self-diagnosable systems have appeared in the litera- tures [1]-[11]. Preparata et al. [3] first introduced a graph- theoretic model of digital systems for the purpose of diagnosis of multiple faults, and presented methods of optimal connection assignments for instantaneous and sequential diagnosis procedures. Maheshwari and Hakimi [10]introduced a diagnos- ability measure t based on the probability of occurrence of faults and presented necessary and sufficient conditions for a system to be probabilistically t-diagnosablein the graph-theoretic model.
For the class of failures, most of the previous works considered thefollowing faultassumption.
Fault Assumption A: Assume that unit ui tests unit
uj.
Then, the test outcomeis"0"if, under thehypothesisthatui
isfault-free, ujis also fault-free.Thetest outcomeis "1" if, under the same hypoth- esis,uj
is faulty. In the case thatui
isfaulty, the test outcome is unreliable andcanassumeeither of the values 0, 1, regardless of thestatus ofuj.
Barsi et al. [11]considered the following fault assumption. Fault Assumption B: Assume that unit
ui
tests unit uj. Then, the testoutcomeis "0"if,under thehypothesisthatuiisfault-free,uj
is also fault-free.Thetestoutcomeis"1,,if, under the same hypoth- esis, uJ is faulty. Ifui is faulty and ujis fault-free,both test out- comes are possible. Ifui
and uj are faulty, the test outcome is necessary "1."In this correspondence, we consider the Maheshwari-Hakimi model and four classes ofprobabilistically diagnosablesystems as follows.
1)
Aclassof systems which areprobabilistically t-diagnosable with repair under fault assumptionA.2)
Aclass of systems which areprobabilistically
t-diagnosable without repair under fault assumptionA.3)
Aclass of systems which areprobabilistically t-diagnosable with repair under fault assumption B.4)
Aclass of systemswhich areprobabilistically t-diagnosable without repair under fault assumption B.For the above classes of systems, we treat two fundamental problems in this correspondence. SupposeasystemS with units U1, u2, ',
u,
and the probabilityp(ui)
ofui
beingfaultyfor allui, then it seems tobe aninteresting problemtodecidewhether we can design a probabilistically t-diagnosable system by adding sometesting linkstoS. This is Problem 1.Problem 1: To find necessary andsufficient conditions forthe existence of testing links to form probabilistically t-diagnosable systems.
Supposeasystem withtestinglinks,thenit alsoseems tobean
interestingproblemtodecide whetherwe candesignaprobabilist-
ically t-diagnosable
system without hardcoreby giving
suitablereliability
toeach unit. This is Problem 2.Problem 2: To find necessary and sufficient conditions for the existence of
probabilities
of failure of all unitstoformprobabilist-
ically t-diagnosable
systems without hardcore.II. DIAGNOSTIC MODEL
A system is supposedto be partitioned inton subsystems, or
units,
notnecessarily
identical but powerful enoughto testotherunitsof the system
by applying
stimuli andobservingtheensuing
responses. Note thatnounittestsitself. LetV={u1, u2, ''',un4be thesetof all units. The relation oftestability
canberepresentedby
afunction F
mapping
Vinto V such thatujEF(uj)
if andonlyifu testsuj.It is also assumed that the faultsarestatisticallyindepen-
dent and the probability of failure of unit ui is denoted byp(ui),
thatis, probability
of failure can berepresented byafunction pmapping
VintoR,whereRisthesetofpositivereal numbers less thanone.Hence,
asystemSwill berepresentedby
atripleS=(V,
F,p).
When Forp isundefined,it is denotedbythedash,thatis,
S=(V, -, p) or S= (V, F, -). Clearly, this diagnostic model S =(V, F,p)canbe also representedbyavertex-weighted
digraph
G=(V, F)
withweight
function p, where the arc (ui,uj)
is anordered
pair
of vertices in V such thatuj
EF(ui).
Theoutcomesofthetestmay berepresentedasbinary
weights
onthearcsofG. Theweightof thearc(ui,
uj),
denotedbys(ui,uj),
is "0" ifuifinds ujto benonfaulty, andis"1"ifuifindsuj
to befaulty.
Thus a system S together with aset oftest outcomes is represented byanarc-weighted digraph,which wedenote byG,.
We now define two types of consistent fault sets under fault assumptions A and B. A subset F ofV,which satisfies the follow- ing two conditions, is called an A-consistent fault set of S with respecttoG,.
Condition 1:
s(ui, uj)
=1,
for allui andujsuch that ujEF(ui),
uiE F= V-F,andujE F.
Condition 2:s(ui,
Uj)
=0for allui, ujsuch thatujEF(uj)
and ui, uje F.A subset F ofV,which satisfies the abovetwo conditions and thefollowing condition, is calledaB-consistentfaultsetof S with respectto
G,.
Condition 3:s(ui,
Uj)
= 1for allui, ujsuch thatuj E F(u1)andui,uje
F.Note that,when all arcs arelabeled with "0," the empty set 0 canbeaconsistent faultset.Thiscasemeans that all the unitsare
nonfaulty.
Since the faults are assumed to be statisticallyindependent, a prioriprobability that F c V is thesetof faults in S is given
by
P(F)
=Ui6EH(1
-p(ui))
uieFf p(ui).
Definition 1: A system S= (V, F,p) is said to be
probabilist-
ically t-diagnosable without repair under fault assumption A (fault assumption B) [shortly, p-t-diagnosable withoutrepair
under A (B)] if for any arc-weighted digraphG,
=(V, F)there existsatmost oneA-consistent (B-consistent) fault set F c V such that P(F)> t. LetA'
(Bo) be the class of systems that are p-t- diagnosable without repair under A (B).Itis easytoseethat inap-t-diagnosable system withoutrepair, any faultsetwhoseaprioriprobability of occurrence greater than tcanbe correctly identified.
Definition 2: A system S = (V, r, p) is said to be probabilist- ically t-diagnosable with repair under fault assumption A (fault assumption B) [shortly, p-t-diagnosable with repair under A (B)] if
CORRESPONDENCE
for any arc-weighted digraph G,=(V, F) there exist no A- consistent (B-consistent)fault sets F1, F2, , F1 (I 22)suchthat
n!=
Fi= 0andP(F1)
> t fori=1, 2,,
1. Let At1(Bt1)
be theclass of systems that are p-t-diagnosable with repair under A(B). In a p-t-diagnosable system with repair, theintersection of all consistent fault sets, whose a priori probability of occurrence is greater thant,is not empty so that at least the units belonging to the intersection are all faulty. Hence, there exists a sequence of applications oftests andrepairs of identified faults that allows all faults originallypresent tobeidentified.
The following theorem easily follows from the above definitions.
Theorem 1: For any O< t < 1, 1) Ao' At1, 2) Al '
Bo,
3) At1 c Bt1, and 4) Bo ' B1.Let
K(t)= -log t +
E
log (1 -p(ui))
uiEV
and
1-p(ui)
W(uj)
=log
P()for all uiE V. Then we can readily show that for any fault set Fc V, P(F)> tif and only ifW(F)< K(t)where
W(F)= E
W(uj).
z4eF
Therefore, the problem of finding the faulty units in a p-t- diagnosable system is reduced to that ofdeterminingtheconsist- ent fault set for which the sum of the weights of the vertices belongingtoit is lessthan
K(t).
Hence, whenreferringto asystem S represented by S=(V, F, p) of its diagnostic model, the re- presentation S=(V,
F,W)
willalsobe utilized.Also,we assume that a unit is more likely to be nonfaulty than faulty, that is,p(ui)
<i forall uiE V. This impliesW(uj)
>0 forallui E V. Ahardcore ofa system S =(V, F,W)
isdefined to be a unitui such thatW(ui)
.K(t),
that is,P(ui)
<t. Graph<Z>,
called the inducedsubgraph of G on Z, consists of vertex set Z c Vand all arcs in G incident at pairs of vertices in Z. It is convenient to further extendthe domain of Fasfollows. LetF'(ui)
={ujIUi
uEF(uj)}.
ForXcV,
letr(x) = U (ui)
-X
F-'(X)= U F-'(ui)
-X.ujeX
Using the precedingdefinitions and notations, wecan rewrite Problems 1 and 2 asfollows.
Problem 1: Givenasystem S=(V,-, W);find necessary and sufficient conditions for the existence of a function F to form probabilistically t-diagnosablesystems.
Problem 2: Given asystem S=(V,F,
-);
find necessary and sufficient conditions for the existence of a function W to form probabilistically t-diagnosable systemswithouthardcore.III. EXISTENCE THEOREMS FOR FUNCTION F
In this section, we consider Problem 1 for each class ofp-t- diagnosablesystems.First,weshallshow necessary and sufficient conditions for the existence of a function F to form p-t- diagnosablesystems inA' and A1.
Lemma 1:If S =(V, F, W) is a system in A'1, then there exists no partition
{U,,
U2} of V such that W(U1)< K(t) andW(U2) < K(t).
Proof: Suppose for some partition {U1, U2} ofV, W(U1) < K(t) and W(U2)< K(t).Wecaneasily findaweighted digraphG, of S that has U1 and U2 as A-consistent fault sets. Thus, by Definition 2, S would not be p-t-diagnosable with repair under
fault assumption A. Q.E.D.
Lemma 2: Givenasystem S =
(V,
,W), there exists a function F, such that S =(V, F, W) is inAo,ifthere exists no partition {U1, U2} of Vwith W(U1), W(U2)< K(t).Proof: Consider a maximally connected graph G= (V, F), i.e., F(u,)= V for all uiE V. We shall prove that the system
s =
(V,F,W)is inAt.Theproof is bycontradiction.Assume the existence of a weighted digraph G, for which there are two A- consistent fault sets F1 and F2 withW(Fj),
W(F2) < K(t). Let X= V- (F1 u F2), Y= F1 r F2,Z1 =F1- Y, andZ2=F2 -Y. Without loss of generality,wehave Z1 7 0.
IfX = 0, then {F2, Z1} isapartition ofVsuch that W(F2)< K(t) and W(Z1)<K(t). This contradicts the hypothesis. There- fore, wehave X
*
0.Since
F(uj)
= V for all uiE V, there exists an arc(ui, uj)
such thatuiEXanduj
E Z1. Sinceui, ujE F,and F2 isanA-consistent fault set,wehaves(ui, Uj)
=0. Butsince F1isalsoanA-consistent fault set andui
E F1, ujE F1, we h-aves(ui, uj)
= 1. This is a contradiction. Hence,our initialassumption waswrong. Q.E.D. Theorem 2: Given a system S =(V,
-, W),then thereexists a function F, such that S= (V, F, W)is in Ao,if and onlyif there exists no partition {U1, U2} of V such thatW(U1)
<K(t)
and W(U2)< K(t).Proof: The necessity of the theorem follows from
1)
of Theorem 1 and Lemma 1. The sufficiency follows from Lemma2. Q.E.D.
Theorem 3: Given a system S=(V,-, W),then there existsa function F,such that S =
(V,
F,W)
is inAt1,if andonly if there exists no partitionJU1,
U2} of V such thatW(U1)
<K(t)
andW(U2)< K(t).
Proof: Thenecessityof the theorem followsfrom Lemma 1. Thesufficiencyfollows from Lemma2and 1)of Theorem 1. Q.E.D.
As anexample, considerasystemconsisting ofthree units such that p(u1)= , p(u2)= , p(U3)= , and t= . Then we have
W(ul)
=log4, W(u2)= log 3, W(u3)=log 2, and K(t)=log 8. Let U1 ={uj}
and U2= {U2,U3}, thenwehaveW(Uj)
=log4 < K(t)and W(U2)=log 6<K(t). Thus,from Theorems 2 and3,it canbeseenthat there existsnofunctionFsuch that the systemis in A orAt.When theprobability of failure of all units is the same, itcan easilybeseenthat the above conditionmeansthat thenumberof faulty units present does not exceed L(n- 1)/2i where n=
VI
and Lx]denotes the greatest
integer
notexceeding
x.Therefore,
Theorems 2and 3containTheorem 1 of Preparataetal.[3].
Next, we show the necessary and sufficient condition for the existenceofafunction Ftoforma
p-t-diagnosable
system inBO.
Theorem4: Given asystem S=(V,
-,W),
then thereexistsafunction
F,
such that S=(V, F, W)
isinB'O,
if andonly
if there exists no partition {U,{u1},
{u2}} of V such thatW(U)
+W(ul)
<K(t)
andW(U)
+W(U2)
<K(t).
Proof-Necessity: The proof is by contradiction. Suppose 381
that S=(V, F, W)is inBb,and that for some partition {U,{u1}, {U2}} of V, W(U) +
W(ul)
< K(t)and W(U)+ W(U2)<K(t). Let G5 be an arc-weighteddigraph such thats(u1, Uj)
= 1 for all arcs (u1,Uj).
LetF1= U u {u1}and F2 = U u {u2},thenF1and F2 are B-consistent fault sets with respect toG,.
Thus, S is not p-t- diagnosable without repair under assumptionB.This contradicts thehypothesis.Sufficiency: Consider a maximally connected digraph G = (V, F). We shall prove that the system S = (V, F,W)is in
Bo.
The proof is by contradiction. Assume the existence of a weighted digraphG,
for which there are two B-consistent fault setsF1and F2 with W(F1), W(F2)< K(t). Let X= V- (F1 u F2), Y = F1 nF2,
Z1 =F1- Y, and Z2= F2 - Y. Without loss of generality,wehave Z1 # 0.IfX
*
0,then there exists an arc(ui, uj)
such thatui
E X and uj EZI.
Sinceui,
ujE F2 and F2 is a B-consistent fault set, we haves(ui, uj)
=0. But since F1 is also a B-consistent fault set and ueE F1, we haves(ui, Uj)
= 1. This is a contradiction. Hence, we have X= 0.If Z .2, then there exists an arc
(ui, uj)
withui,uj
E Z1 since G is amaximallyconnected digraph. Sinceui, uj
E F2 and F2 is a B-consistent faultset, wehaves(ui, Uj)
=0. But sinceF1 is also a B-consistent fault set and ujcF1, we haves(ui, uj)
= 1. This is a contradiction. Hence, we have.Z
< 1. Similarly, we haveIZ21 <1.SinceZ1 #0and IZ1 <.1,wehave JZJ =1,and
canlet Z1 ={u1}.
If Z2 + 0, then 1Z21 = 1 and we can let Z2={U2}. Then we 'have
W(Y)+ W(u1)=
W(F1)
<K(t),
W(Y)+W(u2)= W(F2)<K(t),
and { Y, {u 1},{u2}}isapartitionofVsinceX=
0.
This contradicts thehypothesis of the theorem.If Z2= 0, then Y =F2. Let U= Y-{u2} for some u2E Y. Then wehave
W(U)+
W(ul)
<W(Fj)
<K(t),
W(U)+ W(u2)= W(F2) c K(t),and{Y,
{tU1}, {u2}}
isapartitionofVsinceX=0.
This contradicts the hypothesis of the theorem. Hence,ourinitialassumptionwas wrong, whichimpliesS=(V,
F,W)
is in Bo. Q.E.D. When theprobability
of failure ofall unitsis the same,wecan also show that theconditionof Theorem 4meansthat the number offaulty
units present doesnotexceedn- 2.Thiscoincideswith Theorem 1 of Barsietal.[11],
which isaspecialcaseof Theorem 4.Lastly, we show the necessary and sufficient condition for the existence ofafunction Ftoformap-t-diagnosablesystem inBt'. Theorem5: Givenasystem S=
(V,
-,W),
then there existsa function F, such that S=(V, F, W)
is inBt',
if and only if there exists a subset U of V such thatUt
=lvi
-1 and W(U)>K(t).Proof-Necessity:
The proof is by contradiction. Assume thatthere existsnosubset UofVsuch that U = VI1
andW(U)
.K(t).
Let V={ul, u2,
,un4,
andFi
= V-{ul
for all uiE V. Then 1F11 = lV -1 and thusW(F1)
<K(t)
foralli= 1, 2, , n. Clearly,n n
nFi
=0
andU Fi=
V.i=l i=l
Consider an
arc-weighted digraph G,
for whichs(ui, uj)
= 1 for allarcs(ui, uj). Then,
FiisaB-consistent faultsetwith respecttoG,
for all i=1, 2,
, n.Hence,
S=(V,
F,W)
is not p-t-diagnosable
withrepair
underassumptionB. This contradicts thehypothesis.
Sufficiency:
Consider amaximally
connecteddigraph
G = (V,F),
thatis, F(ui)
= V for all u1i E V. Weshall prove that S(V,
F,W)
isinBt1.
Theproof
isby
contradiction. Assume the existence of aweighted digraph G,
for which there exist B- consistent fault setsFl, F2,
,F,
such thatn Fi=
0 andW(F1)
<K(t),
for alli=1, 2,,
1. IfU5i
Fi* V,
then there exists anarc(ui, uj)
such that ui E (> Fiand UjEFj
r) FkforsomeFj, Fk,
E{F1, F2,
,F}. Sinceui, ujE
Fk
and Fkis aB-consistent fault set,wehaves(ui,uj)
=0. But sinceFj
is alsoaB-consistent fault setanduj
EFj,
wehaves(ui, uj)
= 1. This isa contradiction.Hence,
wehaveU
Fi= V.If
Fj
.2 2 forsomeFj,
then there existsan arc(ui,uj)
with ui, uj EFj
sinceF(ui)
=V.UL=J1
Fi= Vimplies
ujE F,, for someFk#
Fj.
Since ui,uj
EFj
andFj
is a B-consistent fault set, wehave
s(ui, Uj)
= 0. But sinceFkis alsoaB-consistenitfaultsetand Uj EFk,
we haves(ui, Uj)
= 1. This isa contradiction. Hence,wehave
IFi
<1,i.e., IFi1
.lVI
-1 for all i=1,2,,
1. From this andn(=1
Fi=0,
we have Fi ¢ V for allFi. ThusIF11
= V|i-1, i.e., FiF
= 1 for allF1. (l=t F1
= 0 impliesU5=! Fi=
V.Hence, U!= F1=
V andFiF
= 1imply
that1=
Vi, i.e.,
all the subsets UofVwithUg
=lV I-1
areF1,
F2,
,F,. Moreover, W(F1)
< K(t).This contradicts thehypoth-
esis that for some Uc V with Ul =VI
- 1, W(U).K(t).
Hence,
our initialassumption waswrong, which impliesS=(V,
F,
W)
is inBQ.
Q.E.D.Theorems 2 and 3 have shown that the existence theorem forAo and
At'
is thesame.Thesameresultcannotbe obtained for B' andBt1.
Thatis,
the condition of Theorem 4 isnotequivalenttothat of Theorem 5.However,
when the probability offault of all units is the same, the condition of Theorem 4 coincides with that of Theorem 5. Thatis, the condition forBoandBt1 can be restated that the number offaulty units present does not exceed n-2 when all the faults areequiprobable. This isaninteresting result.To illustrate Theorems 4 and 5,considerasystem S=
(V,
W),
which consists of five units Ul, U2, ,U5. Supposep(ul)
=4,p(U2)
= 4,p(U3)
=4,p(U4)
= X, andp(U5)=
a, then we haveW(ul)
=log
6,W(u2)
=log 5, W(U3)
=log 4, W(U4)
=log 3,
andW(Ui5)
=log2.Supposethat t= ± thenwehave K(t)=log 100. min{W(U)
I
U c V,I
UI
= lVI
-i}=
W(U2)
+W(U3)
+W(U4)
+W(U5)
=log 120 .K(t).
Thisimplies
that fort= , S=(V,-, W)satisfies the condition of Theorems 4 and 5. Thus there exists afunction F such thats = (V,
F,W)
isinB'
andBt'.
Suppose that t=4 , then we have K(t) = log 200. Let U= {U3, U4, u5}, then W(U)+ W(u1)=log 144< K(t) and
W(U)+ W(U2)=log 120< K(t). This implies that for t =70, S= (V, , W) does not satisfy the condition of Theorem 4. Thus
CORRESPONDENCE
there exists no function r such that S= (V, F, W) is in
BtO.
However, we can see that S = (V, -, W) satisfies the condition of Theorem 5 as follows: Let U={u1, U2, U3, U4}, then we have W(U)=log 360 . K(t).Hence,for t = , there exists a function F such that S = (V, F, W)isin B',.IV. EXISTENCETHEOREMS FORFUNCTION W
In the last section, we have considered Problem 1 for each class ofp-t-diagnosable systems, and have obtained different results for
At,
At,,Bt,
andB' . However, for Problem 2, we can show that the resultsforAt,
4t,Bt,
and B' are all the same.First we need the following lemma.
Lemma 3: If S=(V, F, W)is a system in
B'l
and has no hard- core, then 1) IF '(ui)*
0 for all uiE V, and 2)for any U c V withI
UI
=2, we haveIF`(U)
# 0.Proof: To see that 1) is necessary, suppose otherwise. Then
there exists a vertex
UkC Vsuch that
F'((u,)
= 0. LetG,
be an arc-weighted digraph such thats(ui, uj)
=0for all arcs(ui, uj)
andlet F1 =
{uk}
and F2 =0.Then it can easily be seen that bothF, and F2 are B-consistent fault sets with respect toGC. Moreover, since S has no hardcore, W(F1)and W(F2)<K(t).
This implies thatSis not p-t-diagnosable with repair under B. This contradicts the hypothesis of the theorem.To seethat2)is necessary, suppose otherwise. Then there exists
a subset U of
Vsuch that
jU
=2 and r- l(U)
=0. Let U
={ul,
u2}, F1 = {u1}and F2={u2}. Consider an arc-weighted digraphG,
such that for alluj
EF(uj), s(ui, uj)
= 1 ifuj
=ui
orU2, ands(ui,
Uj)
=0 otherwise. Then, clearly F, and F2 are B-consistent fault setswith respecttoGC.
Moreover,W(F1)
and W(F2)<K(t)
sinceS has no hardcore. This implies that S is not in
B',,
which contra- dicts thehypothesis ofthetheorem. Q.E.D. Suppose that all the faults are equiprobable, that is, p(u,)=p for all uiE V. One can show thatmax
{p(1-P` 10
<p < n IV.
23}
= (n - Hence, if(n-1f"'
t2 n ni
then
P(ui)
=p(1
-p)-
.tforany0 <p<4,thatis,each unitui
isahardcore for anyprobability of failure.As a matteroffact,this caseis notrealistic. So,fromnow on,weassume that0<
(n-l)n-
nnFor any
(n
-1'n
itcan easily be seen that there existsasolution ptothefollowing inequalities:
p2(1
_pf-2
<t<p(1
- p)n- and 0< p< This impliesthatlog p log (1
tp < 2 log
Ifwelet W=log
[(1
-p)/p],
then the above inequalities imply W<K(t)
<2W.Therefore, for any
0<t<
(n
-Ithereexists afunction Wsuch that W(ui)<K(t)<
2W(ui)
for allUic V.
Lemma 4: Given a system S = (V, F,-)and O<t<
(n-_1r-'
then there exists a function W, such that S= (V, F, W) has no hardcore and is in
At,
if 1)F-'(ui)½
0 for alluie
V and 2)F-'(U) 0
for any UcV
with U=2.
Proof: Since
< t< (n
I)n-
nnthere existsafunction Wsuch that W(ui)<
K(t)
<2W(ui)
forall uiE V. This implies thatW(uj)
+W(uj)
> K(t)for allui,
Uj E V.Let S= (V, r, W)be a systemsatisfying the conditions of the theorem. We shall show that S is in
At.
Assume that Sis not inAt, then there exists an arc-weighted digraphG, for which there are two A-consistent fault sets F, and F2with W(F1)and W(F2)<K(t).
SinceW(tu)
+W(uj)
. K(t) for all ui,uj
E V, we haveIF,! <land IF21 <.1
IfF1= 0,then F2 ½ 0and welet F2
{u$.
From 1)wehave F-'(i)
½ 0, thus there exists a vertex vE
F- (u). Since uE
F2 and F2 is anA-consistent fault set, we haves(v, u)= 1. Butsince F1 = 0is also anA-consistent fault set and u, v E F1, we haves(v, u)=0. This is a contradiction. Therefore we have F1 ½0,
and similarly F2 ½ 0.Let F,={u1},'F2={u2} and U=
{uI,
u2}. From 2) we have F'(U)
½ 0, thus without loss of generality we haveU3 EC U
andU,
EF(u3).
Sinceit,
U3 E F2 and F2 isanA-consistent fault set,we haveS(U3, u,)
= 0. But since F, is also anA-consistent fault set and U3 EF1,
ui E F1,we haveS(U3,
U1)= 1. This isacontradic- tion. Hence,ourinitialassumption was wrong, whichimpliesthatS is in At. Q.E.D.
Condition 4: 1)
F'(ui)
½ 0for all ui E
Vand 2)
F-l(U)
½ 0for any Uc V with U
I=
2. Given a system S = (V, F,-)
andn0n<
then we have the following theorem for
At, A', BO,
andB',
from Theorem 1 and Lemmas 3 and 4.Theorem6:Thereexists afunction W,such that S =(V,
F, W)
is in At
(A',, Bgo,
andB',)
and has no hardcore if and only if S satisfies Condition4.Proof: Incase ofA,-thenecessity follows from 2)and4)of Theorem 1 and Lemma 3. Thesufficiency follows fromLemma 4. In case ofA',the necessity follows from 3)of Theorem 1 and Lemma 3. The sufficiency follows from
1)
of Theorem 1 and Lemma 4.In case of
Bt,
thenecessity follows from4)
of Theorem 1 and Lemma 3. The sufficiency follows from2)
of Theorem 1 and Lemma 4.In case of
B',,
the necessity follows from Lemma 3. The sufficiencyfollows from1)
and3)
ofTheorem 1andLemma4.Q.E.D. 383
Hence, by Theorem 6 we can see that the necessary and sufficient conditions for the existence ofafunction Wtoform a
p-t-diagnosable systemin Ab, A',
B',
and B' areall the same.V. CONCLUSIONS
Thiscorrespondence has consideredtwofundamentalproblems for fourclasses ofp-t-diagnosable systemsA',A',BtO,andB'1: 1) Given asystemS= (V, , W), findnecessaryandsufficientcon- ditions for the existence ofafunction Fsuch thatS = (V,F,W)is p-t-diagnosable. 2) Given asystemS= (V,F,-), find necessary
and sufficient conditions for the existence ofa function Wsuch that = (V,F, W)isp-t-diagnosable and hasno hardcore.
The model anditsdiagnosability treatedhereare moregeneral than those inprevious investigations [1]-[l1].When theprobabil- ity of failure of all units is the same, the existence theorem ofa function Ffor A' and At' coincideswith thatofPreparataetal. [3] and that forB'ocoincideswith that of Barsietal. [11]. Hence,some
existence theorems in this paper are the generalizations of previous results [3],
[11].
The necessary and sufficient conditions for the existence of functions rand Ware,ingeneral,verysimpleandnotsohardto test. Hence, these results are useful to design various p-t- diagnosable systems. Thesynthesis problems of findingthe opti- mal functions F and W have not been considered in this correspondence. Afunction F is said tobe optimalif
E (U)I
is minimized. Afunction Wis said tobe optimalif
'eV W(uj)
is minimized. In the above sense of optimality, optimal designs of p-t-diagnosable systems are open research problems.
ACKNOWLEDGMENT
The authors wishtothank Prof. H. Ozaki of Osaka University for his support and encouragement and Mr. M. Kim of Osaka University for his useful discussions.
REFERENCES
[I] R. E. Forbs. D. H. Rutherford, C. B. Stieglitz, and L. H. Tung, "A self- diagnosable computer," in 1965 Fall Joint Comput.Conf.,AFIPS Conf. Proc., vol. 27.Washington, DC:Spartan,1965,pp. 1073-1086.
[2] E. Manning, "On computer self diagnosis-Part I: Experimental study of a processor-Part II: Generalizations and design principle," IEEE Trans. Elec- tron. Comput.,vol. EC-15, pp. 873-881, 882-890, Dec. 1966.
[3] F. P.Preparata,G.Metze,and R. T. Chien, "On the connection assignment problemof diagnosablesystems,"IEEE Trans.Electron. Comput., vol. EC-16, pp.848-854, Dec. 1967.
[4] C. V.Ramamoorthyand W.Mayeda,"Computerdiagnosis using the blocking gateapproach," IEEE Trans. Comput., vol. C-20, pp. 1294-1299, Nov. 1971. [5] N.Seshagiri, "Completely self-diagnosable digital systems,"Int. J.Syst., vol.1,
pp.235-246,Jan. 1971.
[6] S. L. Hakimi and A. T. Amin, "Characterization of connection assignment of diagnosable systems," IEEE Trans. Comput.(Corresp.),vol.C-23, pp. 86-88, Jan.1974.
[7] A.D.Friedman, "A new measure of digital system diagnosis," in Proc. Fault- Tolerant ComputingConf.,pp. 167-170, June1975.
[8] J.D.Russell and C. R.Kime, "Systemfaultdiagnosis:Closure anddiagnosabi- litywith repair," IEEE Trans.Comput.,vol. C-24, pp. 1078-1089, Nov. 1975. [9] -,"System faultdiagnosis:Masking,exposure, and diagnosabilitywithout
repair," IEEE Trans.Comput., vol. C-24, pp. 1155-1161, Dec. 1975. [10] S. N.Maheshwari and S. L. Hakimi, "On models for diagnosable systems and
probabilistic fault diagnosis," IEEE Trans. Comput., vol. C-25, pp. 228-236, Mar. 1976.
[11] F.Barsi,F.Grandoni,and P.Maestrini, "A theoryofdiagnosabilityof'digital systems,"IEEE Trans.Comput., vol. C-25, pp. 585-593, June 1976.