可変基底NMFに基づく音楽音響信号の解析
6
0
0
全文
(2) Vol.2010-MUS-84 No.10 2010/2/16. 情報処理学会研究報告 IPSJ SIG Technical Report. 2. 提 案 法. 1. Φ 1. 2.1 可変基底 NMF 本報告で提案するモデルは NMF によるスペクトログラムの分解表現を拡張したもので. X. Yω,t ' となるような基底 H = (Hω,d )Ω×D ∈ R ≥0,D×T. R. Hω,d Ud,t. d ≥0,Ω×D. Ω. (1). と表現することができる. 今, 各 d = 1, · · ·, D に対する A(d) を固定したときにとりうる P の集合を S とする.解くべき問題は観測された Y から H, U および P ∈ S を推定するこ とに帰着される.. クトルとアクティベーションのペアが楽器音 1 音高となることを狙っている. 実際の楽器音. 2.2 最適化アルゴリズム. は, 時間に伴ってスペクトルが変化することを考慮すると, スペクトルが各時刻 t において (φ. NMF は一般に観測とモデルの間の何らかの距離尺度を目的関数として最小化する制約付き. ). 一つの状態であると見なし,時刻 t における d 番目の基底の状態を Hd,td,t で表すことに (φ. ). Hω,dd,t Ud,t. T. ・・・. 図 1 可変基底 NMF の概念図. クティベーションの積によって表されるというモデルになっている. 提案手法は, このスペ. X. 1. とアクティベーション U = (Ud,t )D×T ∈. の 2 つの非負値行列を決めることによって得られる.ω, t はそれぞれ周波数と時. Yω,t '. D. 1 ・・・ D. 刻に対応するインデックスであり, 観測スペクトルグラムが D 個のスペクトル (基底) とア. よって,. 1 ・・・. Y = (Yω,t )Ω×T ∈ R≥0,Ω×T と見立て. ・・・. ある.NMF によるスペクトログラムの分解表現は,観測スペクトログラムを非負値行列. 最適化問題として解かれる.よく用いられる距離尺度としては Euclidean (EUC) distance,. Kullback-Leibler (KL) divergence2),3) や Itakura-Saito (IS) divergence4) があり,これら. (2). はより一般化された β-divergence5) の一部として密接な関わりを持っている.. d. と拡張する.ここで, 基底の状態も限られた Φ 個しか存在せず, 時間に伴ってそれらを遷移. NMF において目的関数を解析的に最適化することは困難であり,主に反復計算によりパ. するものと仮定し, H = (Hω,φ,d )Ω×Φ×D ∈ R≥0,Ω×Φ×D を用いてモデルを表現し直す. 各. ラメータを更新していく方法が用いられる.よく知られたアルゴリズムには乗法更新アルゴ. (d). d = 1, · · ·, D に対する Φ 個の基底の状態 hφ = (H1,φ,d , · · ·, HΩ,φ,d )T (φ = 1, · · ·, Φ) に関 (d). して, 許される状態遷移を隣接行列 A の遷移が許される場合. (d) Ai,j. =. (d) (Aφ,φ )Φ×Φ. を用いて表す. 状態 i から状態 j へ. = 1 とし, 遷移が許されない場合は 0. 1. 0. A(d) = 0. 0. 1 . . リズムがあり,EUC distance と KL divergence に対する設計3) から,β-divergence への. . (d) Ai,j. 適用もされており6) ,最近ではアルゴリズムの安定性に関する研究も行われている7) .乗法. = 0 とする. 例えば,. 更新アルゴリズム以外にも様々なアルゴリズムが検討されている8) . 本報告では目的関数を β-divergence とした場合の最適化アルゴリズムを検討する. β-. (3). 9) divergence は様々な定義により用いられる が, 本報告では ¡ β ¢ 1 y + (β − 1)xβ − βyxβ−1 β(β − 1) Dβ (y|x) = y(log y − log x) + (x − y). 1 0 0 とすると, 状態のインデックス 1 → 2, 2 → 3, 3 → 1 の遷移のみが許されることを表して いる. ここで, P = (Pφ,t,d )Φ×T ×D ∈ R≥0,Φ×T ×D を考え, 各 d = 1, · · ·, D に対して各時刻. y − log y − 1. (d). t に基底の状態が hφ のときに Pφ,t,d = 1 とし, そうでないときに Pφ,t,d = 0 とすること で, 提案モデルは. Yω,t '. X. Hω,φ,d Pφ,t,d Ud,t. x x という定義を用いる. このとき解くべきは, 観測された Y から ³. (4). d,φ. 2. P. Dβ Yω,t |. P. β ∈ R\{0, 1}. β=0. Hω,φ,d Pφ,t,d Ud,t. minimize. J (θ) =. subject to. ∀ω,φ,t Hω,φ,t ≥ 0, ∀d,t Ud,t ≥ 0, P ∈ S. ω,t. d,φ. (5). β=1. ´ (6). c 2010 Information Processing Society of Japan °.
(3) Vol.2010-MUS-84 No.10 2010/2/16. 情報処理学会研究報告 IPSJ SIG Technical Report. となる θ = {H, U, P} を求める問題に帰着される.この問題を解くにあたって, 本報告では. 陥りやすくなってしまう. そこで次のようなスケジューリングを行うことによって, より良. 次に示す補助関数法を用いる. 目的関数 J (θ) に対して, ˆ J (θ) = min J (+) (θ, θ). い解を得るための誘導を行う. k = (k1 , k2 , · · ·, kΦ ) を ∀φ kφ ≥ 0,. が成り立つ時,J. (+). (. (7). θˆ. (s+1) k1 (s+1) kφ. 定理 1. 次式 (8) の更新を繰り返すことによって目的関数を単調収束させることが出来る. ˆ θˆ ← argmin J (+) (θ, θ) ˆ θ ← argmin J (+) (θ, θ), (8). ≤. して,. θˆ. (s+1). Pφ,t,d =. 証明 1. 第 s ステップ目の θ, θˆ をそれぞれ (s) を付けて表すと, J (θ(s) ) = J (+) (θ(s) , θˆ(s+1) ) ≥ J (+) (θ(s+1) , θˆ(s+1) ) ≥ J (θ(s+1) ). (S) k1 (S) kφ. φ. kφ = 1 かつ,. =1. (14) (φ = 2, · · ·, Φ) を満たすものとして与える.なお S は反復回数とする. ∀n Pˆ−(n−1),t,d = PˆΦ−(n−1),t,d と. ˆ を補助関数,θˆ を補助変数と定義する. (θ, θ). θ. ≥. (s) k1 , (s) kφ ,. P. Φ X. =0. kn(s+1) Pˆφ−(n−1),t,d. (15). n=1. (9). と更新する.このような更新によって補助関数は各ステップ最小化はされなくなるが,. であることから J (θ) が下界であるときには目的関数は単調収束する.. (s). ∀s k 2. 式 (5) において x を変数と見なすと β に応じて各項の凸性や二階導関数の符号が変化す. (s). = · · · = kΦ と与えることによって紙面の都合上詳細は省略するが, 毎ステップ. ることから分かる通り, 目的関数は β によって異なる性質を示す. そこで, ここからは各 β. 単調に減少させることが出来る.したがって, 目的関数を単調収束させることの出来るアル ˆ ゴリズムを設計することが可能である. H についての更新式は,∂J (+) (θ, θ)/∂H ω,φ,d = 0. ごとに補助関数の設計と最適化アルゴリズムを議論する.. を解くことにより,. 2.2.1 β = 2:EUC distance P P 今, d µω,t,d = 1, d Yˆω,t,d = Yω,t のもとで θˆ = (Yˆω,t,d )Ω×T ×D として補助関数 ˆ は J (+) (θ, θ) X ¢2 1 ¡ ˆ = 1 J (θ) ≤ J (+) (θ, θ) Pφ,t,d Yˆω,t,d − Hω,φ,d Pφ,t,d Ud,t (10) 2 µω,t,d. (s+1) Hω,φ,d. φ. (11). 今, ∀ω,t,d ηω,t,d ≥ 0, ˆ は 関数 J (+) (θ, θ). である.µω,t,d の与え方には自由が許されており, より効率的なアルゴリズムを設計するた. µω,t,d = P. φ. Hω,φ,d Pφ,t,d Ud,t. ˆ = J (+) (θ, θ). (12) Hω,φ,d Pφ,t,d Ud,t d,φ と与える. 補助関数が設計できたことによって以下のように更新アルゴリズムを導出するこ とが出来る. 更新の第 s ステップにおける各パラメータの値を まず P についてだが, (. (s). (17). 2.2.2 β = 1:KL divergence 規準. d,φ. めの検討が行われている10) . ここでは, P. (16). (Pφ,t,d Ud,t ) /µω,t,d ˆ と得られる.同様に U についても ∂J (θ, θ)/∂U d,t = 0 を解き、 P (s+1) ˆ (s) (s+1) (s) Hω,φ,d Yω,t,d (Pφ,t,d )2 /µω,t,d ω,φ (s+1) Ud,t = P (s+1) (s+1) (s) (Hω,φ,d Pφ,t,d )2 /µω,t,d ω,φ を得ることができる。 t (+). ω,t,d,φ. と設計できる.等号成立条件は ³ ´ X X Yˆω,t,d = Hω,φ,d Pφ,t,d Ud,t + µω,t,d Yω,t − Hω,φ,d Pφ,t,d Ud,t. P ˆ (s) (s+1) (s) (s) Y (Pφ,t,d )2 Ud,t /µω,t,d t ω,t,d = P (s+1) (s) 2 (s). P. X µ. ηω,t,d = 1 のもとで補助変数を θˆ = (ηω,t,d )Ω×T ×D として補助. d. ηω,t,d Pφ,t,d Yω,t log. ω,t,d,φ. ηω,t,d Yω,t Yω,t + Hω,φ,d Pφ,t,d Ud,t − Hω,φ,d Ud,t DΦ. ˆ の等号成立条件は と設計できる.J (θ) ≤ J (+) (θ, θ) P Hω,φ,d Pφ,t,d Ud,t φ ηω,t,d = P Hω,φ,d Pφ,t,d Ud,t d,φ である.これより,先ほどと同様の要領で第 s ステップでの更新式は,. を付けて表す.. ). ³ ´2 1 1 X (s) (s) (s) Pφ,t,d Yˆω,t,d − Hω,φ,d Pφ,t,d Ud,t (13) (s) 2 P∈S µ ω,t,d,φ ω,t,d ˆ を最小とする P である. これは動的計画法に は第 s ステップにおいて補助関数 J (+) (θ, θ) Pˆφ,t,d = argmin. Pφ,t,d ←. Φ X. µ. kn(s) Pˆφ−(n−1),t,d. n=1. Hω,φ,d ←. より効率的に求めることが出来る. しかし, 評価実験において検証する通り, P の毎反復に おける最適化は必要以上にパラメータの収束を早めることによって期待していない局所解に. P. η. (18). (19). ª. ¶ (20). P∈S. Pφ,t,d Yω,t , Ud,t ← P Ud,t φ,t,d t. Pω,t,d. t. ©. ˆ ただし, Pˆφ,t,d = argmin J (+) (θ, θ). ¶. P η P Y ω,φ ω,t,d φ,t,d ω,t P ω,φ. Hω,φ,d Pφ,t,d. (21). と得られる.. 3. c 2010 Information Processing Society of Japan °.
(4) Vol.2010-MUS-84 No.10 2010/2/16. 情報処理学会研究報告 IPSJ SIG Technical Report. ˆ の等号成立条件は, である. J (θ) ≤ J (+) (θ, θ). 2.2.3 β = 0:IS divergence 規準. P. Zω,t =. d. Zω,t =. X. Hω,t,d Pφ,t,d Ud,t , ηω,t,d = P. d,φ. Pφ,t,d ←. s n=1 P Hω,φ,t ←. t. kn(s) Pˆφ−(n−1),t,d. 提案法の有効性を検証するために,3 つのシミュレーション実験を行った.また, パラメー. Hω,t,d Pφ,t,d Ud,t. φ,d. である.第 s ステップでの更新式は, Φ X. φ. (23). Hω,t,d Pφ,t,d Ud,t. µ. ©. ª. Pφ,t,d (ηω,t,d ω,t /Ud,t P , Ud,t ← P U /Z ω,t φ,t,d d,t t. sP. (s). タの更新アルゴリズムは反復回数 S = 200 とし, 第 s ステップの kφ の値は, o n max 1 , 2Φ − 2 s + 2 − 1 φ=1 (s) SΦ Φ o nΦ kφ = min 1 , − 2 s + 2 φ=2···Φ Φ SΦ Φ と与えた.. ¶. ˆ ただし, Pˆφ,t,d = argmin J (+) (θ, θ). )2 Y. (24). P∈S ω,φ. (30). 3. 評 価 実 験. ω,t,d,φ. ˆ の等号成立条件は と設計できる.J (θ) ≤ J (+) (θ, θ) P. X. Xω,t,d,φ Xω,t,d , ηω,t,d = P Xω,t,d,φ d d である. 各パラメータの更新式は同様に導出できるが紙面の都合上省略する.. ηω,t,d = 1, ∀ω,t Zω,t ≥ 0 のもとで補助変数を θˆ = (+) ˆ は {(ηω,t,d )Ω×T ×D , (Zω,t )( (θ, θ) Ω×T } として補助関数 J ) Zω,t 2 X log Yω,t −2 Pφ,t,d (ηω,t,d ) Yω,t Hω,t,d Pφ,t,d Ud,t (+) ˆ (22) + J (θ, θ) = + Hω,φ,d Ud,t Zω,t D 今, ∀ω,t,d ηω,t,d ≥ 0,. Pφ,t,d (ηω,t,d )2 Yω,t /Hω,t,d. (31). 初めに提案手法の基礎的な動作確認として, 楽器単音からスペクトルの状態変化を学習す. P. Hω,t,d Pφ,t,d /Zω,t ω,φ. る. 実験に用いた信号は,ピアノ C3 の 4 つの音長の入った音響信号を MIDI によって合. (25). 成した.振幅スペクトログラム Y は短時間フーリエ変換 (サンプリング周波数 16kHz,フ. と得られる.. レーム長 64ms,フレームシフト 32ms,Hanning 窓) により計算した.ピアノにおける基. 2.2.4 β-divergence 規準 (β 6= 2, 1, 0) 今, ∀ω,t,d ηω,t,d ≥ 0,. P. d. ηω,t,d = 1, ∀ω,t Zω,t. 底の状態遷移は left-to-right に起こることを想定し , 隣接行列 A(d) は, 1 1 0 ... 0. ≥ 0 のもとで補助変数を θˆ =. ˆ は {(ηω,t,d )Ω×T ×D , (Zω,t )Ω×T } として補助関数 J (+) (θ, θ) 1 (+) · J (θ) = β(β − 1) µ ¶β β Yω,t Xω,t,d,φ (2) + ηω,t,d (β − 1) + Yω,t Eω,t,d,φ , (β > 2, 0 < β < 1) DΦ ηω,t,d µ ¶β µ ¶β−1 β X Yω,t Xω,t,d,φ Xω,t,d,φ + ηω,t,d (β − 1) − ηω,t,d βYω,t (1 < β < 2) ηω,t,d ηω,t,d DΦ ω,t,d,φ ¶ µ β−1 β Xω,t,d,φ Yω,t + E (1) 2−β (β < 0) βY DΦ ω,t,d,φ − ηω,t,d (Pφ,t,d ) ηω,t,d. ∀d A. = . 0 .. .. 1. 1 ... ... .. 0 .. .. . (32). 1 0 ... 0 1 とした. 基底数 D = 1, 状態数 Φ = 4 としてパラメータの初期値を乱数により与え, 目的関 数として KL divergence を用いた場合の学習結果を図 2 に示す. 学習結果から, 基底の状態 遷移に着目すると, 音の立ち上がりから 2 状態は音長によらず同程度の長さを持ち, 減衰の 長さが異なっている様子が確認できる. また基底として学習されたスペクトルパターンに着 目すると, 各倍音ごとに異なる減衰をしていることも分かる.. (26). 二つ目の実験は, 提案法の音源分離としての性能評価として,従来の NMF と提案法の SNR の比較を行った.振幅スペクトログラム上で,各音源の元信号 Iω,t と推定した ˆIω,t の. と設計することが出来る. ただし. Xω,t,d,φ = Hω,t,d Pφ,t,d Ud,t (1) β−1 β Eω,t,d,φ = β(β − 1)Zω,t Xω,t,d,φ − (β − 1)2 Zω,t (2) β−2 2 β−1 Eω,t,d,φ = −β(β − 1)Zω,t Xω,t,d,φ + (β − 1) Zω,t. (d). (27). 間の SNR(Signal-to-Noise Ratio) は,. (28). P. I2 ω,t ω,t. (33) ¢2 Iω,t − ˆIω,t により計算した.観測信号としてヴァイオリンによる D[,F,A[ の混合音を用いた. ビブ SNR = 10 log10 P. (29). ¡. ω,t. 4. c 2010 Information Processing Society of Japan °.
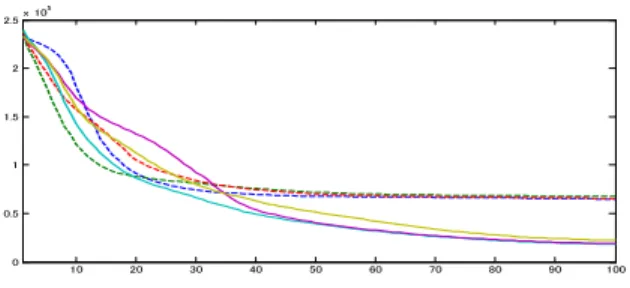
(5) Vol.2010-MUS-84 No.10 2010/2/16. 情報処理学会研究報告 IPSJ SIG Technical Report. ラートによる基底の状態遷移が left-to-right に起こると想定した場合と, ergodic に起こる. (d). ∀d A. = . 1. 1. 1. .... 1. 1 .. .. 1. 1 ... .... 1 .. .. .. 500. . H ω ,1,1 H ω , 2,1 H ω ,3,1 H ω , 4,1. 400. (34). ω. 1 1 ... 1 1 とした場合をそれぞれ実験した. 基底数 D = 3, 各基底の状態数 Φ = 5 と与えた. 比較対象. Frequency bin #. と想定して隣接行列を. 300. 500 400 300 200 100 50. 100. 150. Frame #. 200. 300. 200. U1,t. 200. とする NMF は基底数 3, 15 として分解を行った. 分離した各信号は元信号のどの音源に属. 100. 100. するか分からないため, 元信号全てとの SNR を求め最も大きな値を持つ音源への割り当て 0. を行った. もし割り当ての存在しない音源があった場合は, その音源は SNR の算出には用. 0. 0.05. 0.1 0. 0.05. 0.1 0. 0.05. 0.1 0. 0.05. 0. 0.1. 0. 50. 100. いず, 代わりに割り当ての存在しなかった音源数の割合をエラー率として計算した. 従来法, 提案法ともに, パラメータの初期値は乱数によって与え, 10 回の試行の SNR とエラー率を. 図2. 表 1 に示した. 目的関数として KL divergence を用いた場合の分離結果の一例を図 3 に示. 250. t. 150. 200. 250. 音長の異なる 4 音を演奏したピアノの観測スペクトログラム (右上) から 学習した基底の 4 状態 (左) とそれ ぞれのアクティベーション (右下). した. 基底の状態変化から, ヴァイオリンのビブラートが状態遷移として学習出来ているこ 表 1 各アルゴリズムにおける音源分離性能の SNR(dB) とエラー率 (%) Table 1 Source Separation Performance (Signal-to-Noise Ratio [dB], error rate [%]). とが確認できる. SNR に関しては, IS divergence の場合を除いて, 基底数が 15 の時の従来 法と同程度の性能を示している. 従来法では各音源はいくつかの信号に分解され, それらの. algorithm. 統合には元信号を利用しているが, 提案法においては各音源ごとに分解された信号が階層的 にまとまった形で得ることが出来る. このことから提案法は元信号の事前知識を必要としな. EUC-NMF(D = 3) EUC-NMF(D = 15) EUC-proposed(left-to-right) EUC-proposed(ergodic) KL-NMF(D = 3) KL-NMF(D = 15) KL-proposed(left-to-right) KL-proposed(ergodic) IS-NMF(D = 3) IS-NMF(D = 15) IS-proposed(left-to-right) IS-proposed(ergodic). い音源分離手法としても有用であることが確認できた. しかし, 提案法の基底の状態遷移に 関して, ergodic なモデルの方が left-to-right モデルよりも良い分離性能を示しているよう に, 事前に与える状態遷移の拘束によって性能が変わることも確認できた. 今後は状態遷移 も同時に推定するような枠組みへ拡張する予定である. 最後の実験として, 状態遷移を表す P の更新にスケジューリングを用いた効果を検証し た. 観測信号は二つ目の実験と同じヴァイオリンの混合音を用いた. 目的関数として EUC. distance を用い, 更新アルゴリズムは反復回数 S = 100 とし, スケジューリングを行った場 合と行わなかった場合をそれぞれ 3 回ずつ試行した時の目的関数の様子を図 4 に示した. ス. SNR(dB) Source1 13.92 12.32 15.60 16.31 14.74 14.88 16.13 16.64 1.12 10.77 1.60 0.44. error rate(%) Source2 9.46 12.98 13.70 14,83 9.41 15.99 13.28 14.64 2.05 11.19 6.11 0.64. Source3 8.14 10.69 11.74 11.72 8.39 11.09 11.52 12.00 1.66 10.57 1.81 0.43. Mean 10.51 11.98 13.68 14.29 10.85 13.99 13.64 14.62 1.61 10.84 3.17 0.47. 0 0 0 0 0 0 0 0 0 0 0 13. ケジューリングによって局所解が回避できていることが確認できる. スパース表現の枠組みを提案した. 今後は実音楽に対する実験を行い, 音源分離や自動採譜. 4. お わ り に. への有用性を検証していくつもりである. また, 基底の状態遷移を隠れ変数として同時に推 定できるような枠組みへの拡張や, 複素 NMF11) と同様に複素スペクトル領域のモデルへの. 本報告では時間に伴って変化する楽器音スペクトルを教師なしに学習することを目的とし て, スペクトルパターン (基底) の状態遷移の拘束を導入した可変基底 NMF という新しい. 拡張も検討していきたい.. 5. c 2010 Information Processing Society of Japan °.
(6) Vol.2010-MUS-84 No.10 2010/2/16. 情報処理学会研究報告 IPSJ SIG Technical Report 5. Frequency bin #. 2.5. x 10. 2. 500 400. 1.5. 300. 1. 200. 0.5. 100. 0. 50. 100. 150. 200. 図4. 500. 10. 20. 30. 40. 50. 60. 70. 80. 90. 100. 更新アルゴリズムにおける目的関数の変化. 横軸は反復回数, 縦軸は目的関数の値を表す. 状態遷移を表す P の更新にスケジューリングを行った場合 (実線) に, 行わなかった場合 (破線) よりも目的関数が減少している ことが確認できる.. 400 300. vol. 13. Vancouver, British Columbia, Canada: MIT Press, Dec. 2001, pp. 556-562. 4) F. Itakura and S. Saito, “ Analysis synthesis telephony based on the maximum likelihood method, ” in Proc. of 6th International Congress on Acoustics, Tokyo, Japan, Aug. 1968, pp. C17-C20. 5) S. Eguchi and Y. Kano, “ Robustifying maximum likelihood estimation, ” Tokyo Institute of Statistical Mathematics, Tokyo, Japan, Tech. Rep., 2001. [Online]. 6) A. Cichocki, R. Zdunek, and S. Amari,“ Csisz´ ars divergences for non-negative matrix factorization : Family of new algorithms, ”in Proc. of 6th International Conference on Independent Component Analysis and Blind Signal Separation, Charleston, SC, USA, Mar. 2006, pp. 32-39. 7) R Badeau, N Bertin, and E Vincent, “ On the stability of multiplicative update algorithms. Application to non-negative matrix factorization, ”Telecom ParisTech, Technical report., 2009. 8) A. Cichocki, R. Zdunek, and S. Amari, “ Nonnegative matrix and tensor factorization, ” IEEE Signal Processing Magazine, vol. 25, no. 1, pp. 142-145, Jan. 2008. 9) C. F´evotte, N. Bertin, and J.-L. Durrieu,“ Nonnegative matrix factorization with the Itakura-Saito divergence. With application to music analysis, ”Neural Computation, vol. 21, no. 3, pp. 793-830, Mar. 2009. 10) 亀岡, ルルー, “ Frobenius ノルム規準の非負値行列因子分解における乗法更新式に関 する一考察, ” 日本音響学会 2009 年秋季研究発表会講演論文集, 1-P-8, pp. 709-712, 2009. 11) H. Kameoka, N. Ono, K. Kashino, and S. Sagayama, ”Complex NMF: A New Sparse Representation for Acoustic Signals,” In Proc. 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, pp. 3437-3440, 2009.. 200. State #. 100 50. 100. 150. 200. 50. 100. 150. 200. 1 2 3 4 5. Frame # 図 3 3 音源を混合した観測スペクトルグラム (上段) から 分離した 1 音源のスペクトログラム (中段) とその基底 の状態遷移 (下段). ビブラートが 5 つの状態の遷移によって表現出来ていることが確認できる.. 参 考. 文. 献. 1) 亀岡, ルルー, 大石, 柏野, ”Music Factorizer: 音楽音響信号をノート単位で編集でき るインタフェース,” 情報処理学会研究報告, 2009-MUS-81-9, 2009. 2) D. D. Lee and H. S. Seung,“ Learning the parts of objects by non-negative matrix factorization, ” Nature, vol. 401, pp. 788-791, Oct. 1999. 3) D. D. Lee and H. S. Seung, “ Algorithms for non-negative matrix factorization, ” in Proc. of the Conference on Advances in Neural Information Processing Systems,. 6. c 2010 Information Processing Society of Japan °.
(7)
図
![Table 1 Source Separation Performance (Signal-to-Noise Ratio [dB], error rate [%])](https://thumb-ap.123doks.com/thumbv2/123deta/6818044.1701318/5.1263.659.1138.128.333/table-source-separation-performance-signal-noise-ratio-error.webp)
関連したドキュメント
(平成 10 年法律第 114 号。)第 15 条に基づく積極的疫学調査の一環として、「新型コロナ
音節の外側に解放されることがない】)。ところがこ
Regional Clustering and Visualization of Industrial Structure based on Principal Component Analysis for Input-output Table Data.. Division of Human and Socio-Environmental
Comparing the Gauss-Jordan-based algorithm and the algorithm presented in [5], which is based on the LU factorization of the Laplacian matrix, we note that despite the fact that
Then pass into the next column which is the (q + 1)th column, put 1 at the second row of this column and repeat the process until we have only p − 2 rows for going down (then we
「1.地域の音楽家・音楽団体ネットワークの運用」については、公式 LINE 等 SNS
気候変動適応法第 13条に基 づく地域 気候変動適応セン
・ぴっとんへべへべ音楽会 2 回 ・どこどこどこどんどこ音楽会 1 回 ステップ 5.「ママカフェ」のソフトづくり ステップ 6.「ママカフェ」の具体的内容の検討
