ハンドル体結び目の
(同辺
)結び目解消数と
Alexanderバイカンドルの
G族彩色
村尾 智
(筑波大数理物質
)∗ 概 要任意のハンドル体結び目は,そのスパインである空間3価グラフにおける交 差交換とIH-変形により自明なハンドル体結び目に変形できることが知られ ている。 このとき,自明なハンドル体結び目に変形するために必要な交差交 換の最小回数をハンドル体結び目の結び目解消数という。 また,この結び目 解消操作において,交差交換を同じ辺同士に制限しても同様に自明なハンド ル体に変形できることが知られており,この制限付きの結び目解消数を特に 同辺結び目解消数という。本稿ではAlexanderバイカンドルのG族彩色を用 いることで,ハンドル体結び目の結び目解消数及び同辺結び目解消数を評価 する方法を与える。
1.
ハンドル体結び目
ハンドル体結び目とは,3 次元球面
S3に埋め込まれたハンドル体のことであり,2 つ のハンドル体結び目が同値であるとは,
S3の向きを保つ自己同相写像により一方がも う一方へと移ることである.また,ハンドル体結び目が自明であるとは,その外部が ハンドル体となることである.本稿では,種数
gの自明なハンドル体結び目を
Ogと表 す.空間
3価グラフとは,
S3に埋め込まれた
3価グラフのことであり,空間
3価グラフ
の
Y-orientationとは,全ての頂点での入次数,出次数が
1以上になるように空間
3価
グラフの各辺に向きを入れることである(図
1).任意の
Y-oriented空間
3価グラフ
K及びハンドル体結び目
Hに対して,
Hが
Kの正則近傍となっているとき,
Kは
Hを 表すという.任意のハンドル体結び目はある
Y-oriented空間
3価グラフで表すことが できる.また,ハンドル体結び目
Hのダイアグラムを,
Hを表す
Y-oriented空間
3価 グラフ
Kのダイアグラムで定義する.このとき,以下の定理が成り立つ.
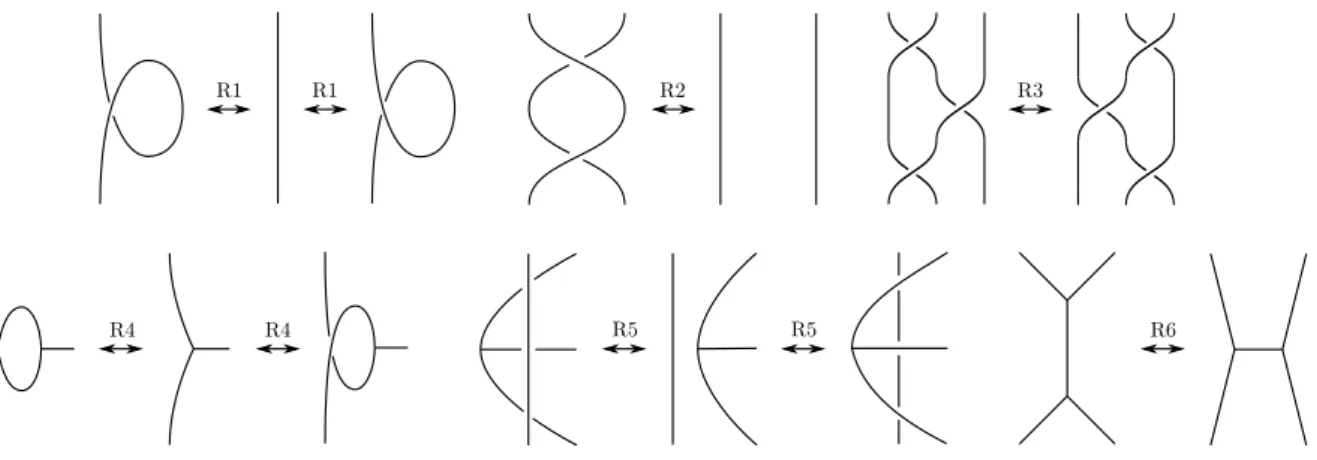
定理
1.1 ([6]). Diをハンドル体結び目
Hiのダイアグラムとする
(i= 1,2).このとき,
H1
と
H2が同値であることと,
D1と
D2が有限回の
Y-orientationを保つ
R1–R6変形
(図
2)で移り合うことは同値である.
図
1: Y-orientations本稿では,ハンドル体結び目のダイアグラム
Dに対して,
Dの
arc全体の集合,
semi- arc全体の集合をそれぞれ
A(D),
SA(D)で表す.また,任意の
m ∈ Z>0について,
Zm :=Z/mZ
,
Z0 :=Zとする.
∗e-mail:[email protected]
web: http://www.math.tsukuba.ac.jp/~t-murao/
図
2:ハンドル体結び目の
Reidemeister変形
2.
ハンドル体結び目の(同辺)ゴルディアン距離と(同辺)結び目解消数
ハンドル体結び目
Hの交差交換とは,
Hを表す空間
3価グラフにおける交差交換のこ とである.この変形は,図
3のようにハンドル体結び目における
2本のハンドルの上下 を入れ替えることで実現される.また,ハンドル体結び目
Hの同辺交差交換とは,H を表す空間
3価グラフにおける同じ辺同士での交差交換のことである.
図
3:ハンドル体結び目の交差交換
このとき,次の補題が成り立つ.
補題
2.1.任意のハンドル体結び目は有限回の交差交換及び有限回の同辺交差交換によ り自明なハンドル体結び目へと変形できる.
補題
2.1より,任意の
2つの同種数ハンドル体結び目
H1,
H2は有限回の交差交換及び 有限回の同辺交差交換により互いに移り合う.そこで,H
1と
H2のゴルディアン距離
d(H1, H2)及び同辺ゴルディアン距離
d(Hb 1, H2)をそれぞれ
d(H1, H2) := min{n|H1
と
H2は
n回の交差交換で移り合う
}, d(Hb 1, H2) := min{n|H1と
H2は
n回の同辺交差交換で移り合う
}で定義する.さらに,任意の種数
gのハンドル体結び目
Hに対して,H の結び目解消 数
u(H)及び同辺結び目解消数
d(H)bをそれぞれ
u(H) :=d(H, Og), b
u(H) :=d(H, Ob g)
で定義する.
3.
(バイ)カンドルと(バイ)カンドルの
G族
本章ではまず初めに,カンドルとバイカンドルの定義を復習する.
定義
3.1 ([9, 10]).空でない集合
Xが次を満たす二項演算
∗:X×X →Xを持つとき,
X
をカンドルという.
•
任意の
x∈Xに対して,
x∗x=x.
•
任意の
x∈Xに対して,写像
Sx :X →X;y7→y∗xは全単射である.
•
任意の
x, y, z ∈Xに対して,
(x∗y)∗z= (x∗z)∗(y∗z).
定義
3.2 ([1]).空でない集合
Xが次を満たす
2つの二項演算
∗,∗:X×X →Xを持つ とき,X をバイカンドルという.
•
任意の
x∈Xに対して,
x∗x=x∗x.
•
任意の
x∈Xに対して,写像
Sx :X →X;y 7→y∗xは全単射.
任意の
x∈Xに対して,写像
Sx :X →X;y 7→y∗xは全単射.
写像
S :X×X→X×X; (x, y)7→(y∗x, x∗y)は全単射.
•
任意の
x, y, z ∈Xに対して,
(x∗y)∗(z∗y) = (x∗z)∗(y∗z)
,
(x∗y)∗(z∗y) = (x∗z)∗(y∗z),
(x∗y)∗(z∗y) = (x∗z)∗(y∗z).ここで,任意の
n ∈ Zに対して,
∗nx:= Snx,
∗nx :=Snxとする.(X,
∗)がカンドル であることと,
(X,∗,∗)が
x∗y =xによりバイカンドルとなることは同値である.
例
3.3.任意の
m ∈Z≥0に対して,
Zm[t±1, s±1]は
a∗b=ta+ (s−t)b,
a∗b =sa,に よりバイカンドルである.これを
Alexanderバイカンドルという
.定義
3.4. Xをバイカンドルとする.このとき,
2つの二項演算の族
∗[n],∗[n] :X×X → X(n∈Z)を以下で定義する.ここで,
i, jは任意の整数である.
a∗[0] b=a, a∗[1]b=a∗b, a∗[i+j]b= (a∗[i]b)∗[j](b∗[i]b), a∗[0] b=a, a∗[1]b=a∗b, a∗[i+j]b= (a∗[i]b)∗[j](b∗[i]b).
a =a∗[0]b = (a∗[−1]b)∗[1](b∗[−1]b) = (a∗[−1]b)∗(b∗[−1]b)
であるから
, a∗[−1]b= a∗−1(b∗[−1]b),(b∗[−1]b)∗(b∗[−1]b) = bが成り立つ. また,任意の
Alexanderバイカ ンドル
X及び
a, b∈Xに対して,
a∗[n]b =tna+ (sn−tn)b,
a∗[n]b =snaが成り立つ.
ここで,バイカンドル
Xの型(
type)を
typeX := min{n >0|a∗[n]b =a =a∗[n]b(∀a, b∈X)}.
で定める.任意の有限カンドルは有限の型を持つことが知られている
[7].次に,カンドルの
G族とバイカンドルの
G族の定義を紹介する.
定義
3.5 ([3]). Gを単位元
eを持つ群とする.空でない集合
Xが次を満たす二項演算 の族
∗g :X×X →X(g ∈G)を持つとき,X をカンドルの
G族という.
•
任意の
x∈X及び
g ∈Gに対して,x
∗g x=x.•
任意の
x, y ∈X及び
g, h∈Gに対して,
x∗ghy= (x∗gy)∗hy,
x∗ey=x.
•
任意の
x, y, z ∈X及び
g, h∈Gに対して,
(x∗gy)∗hz = (x∗hz)∗h−1gh(y∗hz). 定義
3.6 ([4, 7]). Gを単位元
eを持つ群とする.空でない集合
Xが次を満たす
2つの二 項演算の族
∗g,∗g :X×X→X(g ∈G)を持つとき,
Xをバイカンドルの
G族という.
•
任意の
x∈X及び
g ∈Gに対して,
x∗gx=x∗gx.
•
任意の
x, y ∈X及び
g, h∈Gに対して,
x∗ghy= (x∗gy)∗h(y∗gy), x∗ey =x, x∗ghy= (x∗gy)∗h(y∗gy), x∗ey =x.
•
任意の
x, y, z ∈X及び
g, h∈Gに対して,
(x∗gy)∗h(z∗gy) = (x∗h z)∗h−1gh(y∗hz), (x∗gy)∗h(z∗gy) = (x∗h z)∗h−1gh(y∗hz), (x∗gy)∗h(z∗gy) = (x∗h z)∗h−1gh(y∗hz).
例
3.7 ([7]).バイカンドル
(X,∗,∗)が
typeX <∞を満たすとする.このとき,
(X, {∗[n]}[n]∈ZtypeX,{∗[n]}[n]∈ZtypeX)はバイカンドルの
ZtypeX族である.特に,
Xが
Alexan- derバイカンドルのとき,
(X,{∗[n]}[n]∈ZtypeX,{∗[n]}[n]∈ZtypeX)を
Alexanderバイカンドル の
ZtypeX族という.
4.
バイカンドルの
G族彩色
本章では,ハンドル体結び目のダイアグラムに対して,バイカンドルの
G族による彩色 を定義する.D をハンドル体結び目
Hのダイアグラムとする.このとき,D の
G-flowとは,
Dの各交点及び頂点で以下の条件を満たす写像
ϕ:A(D)→Gのことである.
本稿では,混同を避けるため,
Gの元をしばしば下線付きの文字で表す.
G-flowϕの与 えられたダイアグラム
Dを
(D, ϕ)で表し,H の
G-flowedダイアグラムという.また,
Flow(D;G) :={ϕ |ϕ:D
の
G−flow}と定める.
D
をハンドル体結び目
Hのダイアグラムとし,
D′を
Dから
1回の
R1–R6変形によ り得られるダイアグラムとする.このとき,任意の
ϕ ∈Flow(D;G)に対して,変形を 施した場所以外では
ϕと一致するような
ϕ′ ∈Flow(D′;G)が唯一つ存在する.したがっ
て,
#Flow(D;G)はハンドル体結び目
Hの不変量となる.また,この
ϕ′を
ϕの付随
G-flow
といい,(D
′, ϕ′)を
(D, ϕ)の付随
G-flowedダイアグラムという.
任意の
k∈Z≥0及びハンドル体結び目
Hのダイアグラム
Dの
Zk-flowϕに対して,
gcdϕ:= gcd{ϕ(a), k |a∈ A(D)}
と定める.このとき,以下の補題を得る.
補題
4.1.任意の
k ∈Z≥0に対し,(D, ϕ) をハンドル体結び目
Hの
Zk-flowedダイアグ ラムとし,
(D′, ϕ′)を
(D, ϕ)の付随
Zk-flowedダイアグラムとする
.このとき,
gcdϕ= gcdϕ′が成り立つ.
X
をバイカンドルの
G族とし,(D, ϕ) をハンドル体結び目
Hの
G-flowedダイアグラ ムとする
.このとき,
(D, ϕ)の
X-coloringとは,
(D, ϕ)の各交点及び頂点で以下の条件 を満たす写像
C :SA(D, ϕ)→Xのことである.
ここで,
ColX(D, ϕ) :={C |C : (D, ϕ)の
X-coloring}と定める.また,
Xが体のとき,
ColX(D, ϕ)
は
X上のベクトル空間となることが知られている.
命題
4.2 ([7]). Xをバイカンドルの
G族とし,
(D, ϕ)をハンドル体結び目
Hの
G- flowedダイアグラム,
(D′, ϕ′)を
(D, ϕ)の付随
G-flowedダイアグラムとする.このと き,任意の
C ∈ColX(D, ϕ)に対して,変形を施した場所以外では
Cと一致するような
C′ ∈ColX(D′, ϕ′)が唯一つ存在する.
この
X-coloring C′を
Cの付随
X-coloringという.この命題により,
#ColX(D, ϕ) =#ColX(D′, ϕ′)
を得る.
補題
4.3. (D, ϕ)をハンドル体結び目
Hの
G-flowedダイアグラムとする.このとき,任 意のバイカンドルの
G族
Xに対して,
#ColX(D, ϕ)≥#Xが成り立つ.特に,自明な ハンドル体結び目の
G-flowedダイアグラム
(O, ϕ)に対して,#Col
X(O, ϕ) = #Xが成 り立つ.
例
4.4.種数
gの自明ハンドル体結び目
Ogの図
4で表されるダイアグラムを同じく
Ogで表す.このとき,任意のバイカンドルの
G族
X及び
Ogの任意の
G-flowedダイアグ
ラム
(Og, ϕ)に対して,
#ColX(Og, ϕ) = #Xを示す.まず,
Ogの任意の
G-flow ϕは
ai ∈ G (∀i = 1, . . . , g)と
Gの単位元
eを用いて図
4のように表せる.次に,
(Og, ϕ)の
X-coloringを考える.最も左側の
loopに
x∈Xを対応させたとすると,残りの
semi-arcに対応する
Xの元は図
4にように一意に定まる.したがって,
#ColX(Og, ϕ) = #Xで
ある.
図
4:自明ハンドル体結び目
Og5.
主結果
岩切
[8]は,任意のハンドル体結び目に対して,その
Zm-flowedダイアグラム(m
= 2,3)の
Alexanderカンドル
Zp[t±1]/(h(t))(
p:奇素数,
h(t)(̸=t, t−1):既約多項式)によ
る
coloringを用いて,結び目解消数の評価式を得た.以下の定理は,この結果の一般化
である.
定理
5.1. Diを種数
gのハンドル体結び目
Hiのダイアグラムとし
(i = 1,2),
X = Zp[t±1, s±1]/(f(t))を
Alexanderバイカンドルの
Zk族とする.ここで,p は素数,s
∈ Zp[t±1],
f(t)∈Zp[t±1]は既約多項式である.このとき,以下が成り立つ.
max
ϕ1∈Flow(D1;Zk) min
ϕ2∈Flow(D2;Zk) gcdϕ1=gcdϕ2
|dim ColX(D1, ϕ1)−dim ColX(D2, ϕ2)| ≤d(H1, H2) (s= 1, t),
max
ϕ1∈Flow(D1;Zk) min
ϕ2∈Flow(D2;Zk) gcdϕ1=gcdϕ2
|dim ColX(D1, ϕ1)−dim ColX(D2, ϕ2)| ≤d(Hb 1, H2).
また,定理
5.1より直ちに以下の系が得られる.
系
5.2. Dをハンドル体結び目
Hのダイアグラムとし,
X = Zp[t±1, s±1]/(f(t))を
Alexanderバイカンドルの
Zk族とする.ここで,
pは素数,
s ∈Zp[t±1],
f(t)∈Zp[t±1]は既約多項式である.このとき,以下が成り立つ.
max
ϕ∈Flow(D;Zk)|dim ColX(D, ϕ)−1| ≤u(H) (s = 1, t), max
ϕ∈Flow(D;Zk)|dim ColX(D, ϕ)−1| ≤u(H).b
6. Examples
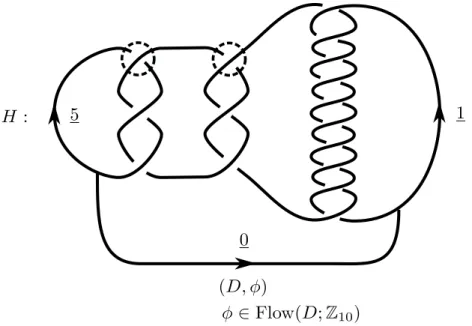
例
6.1. Hを図
5で表されるハンドル体結び目とし,
Hの
Z10-flowedダイアグラム
(D, ϕ)を図
5のように与える.さらに,
s:= 1,既約多項式
f(t) := 1+2t+t2+2t3+t4 ∈Z3[t±1]とし,
X :=Z3[t±1, s±1]/(f(t))とすると,
Xは
Alexanderバイカンドルの
Z10族である.
このとき,
dim ColX(D, ϕ) = 3である.したがって,系
5.2より,2
≤u(H)を得る.一 方,
Hは図
5の点線で記されている
2つの部分での交差交換により,自明なハンドル体 結び目へと変形できる.したがって,
u(H)≤2である.以上より,
u(H) = 2を得る.
例
6.2. H1, H2をそれぞれ図
6で表されるハンドル体結び目とし,
H1の
Z3-flowedダ
イアグラム
(D1, ϕ1)を図
6のように与える.さらに,
s := 1,既約多項式
f(t) := 1 + t+t2 ∈ Z2[t±1]とし,
X := Z2[t±1, s±1]/(f(t))とすると,
Xは
Alexanderバイカンド
図
5:結び目解消数
ルの
Z3族である.このとき,
dim ColX(D1, ϕ1) = 5である.一方,
H2の任意の
Z3- flowedダイアグラム
(D2, ϕ2)は,
a, b, c ∈ Z3を用いて図
6のように表せる.このとき,
dim ColX(D2, ϕ2)≤3
である.したがって,dim Col
X(D1, ϕ1)−dim ColX(D2, ϕ2)≥2であり,定理
5.1より,
2≤d(H1, H2)を得る.一方,
H1と
H2は図
6の点線で記されて いる
2つの部分での交差交換により,互いに移り合う.したがって,
d(H1, H2)≤2で ある.以上より,d(H
1, H2) = 2を得る.
図
6:ゴルディアン距離
参考文献
[1] R. Fenn, C. Rourke and B. Sanderson, Trunks and classifying spaces, Appl. Categ.
Structure 3(1995), 321–356.
[2] N. Habegger and X.-S. Lin. The classification of links up to link-homotopy, J. Amer.
Math. Soc. 3(1990), 389–419.
[3] A. Ishii, M. Iwakiri, Y. Jang, K. Oshiro,A G-family of quandles and handlebody-knots, Ill. J. Math.57(2013), 817–838.
[4] A. Ishii, M. Iwakiri, S. Kamada, J. Kim, S. Matsuzaki and K. Oshiro,A multiple con- jugation biquandle and handlebody-links, preprint.
[5] A. Ishii, A multiple conjugation quandle and handlebody-knots, Topology Appl.
196(2015), 492–500.
[6] A. Ishii, The Markov theorems for spatial graphs and handlebody-knots with Y- orientations, Internat. J. Math.26(2015), 1550116, 23 pp.
[7] A. Ishii and S. Nelson, Partially multiplicative biquandles and handlebody-knots, to ap- pear in Contemporary Mathematics.
[8] M. Iwakiri,Unknotting numbers for handlebody-knots and Alexander quandle colorings, J. Knot Theory Ramifications24(2015), 1550059, 13 pp.
[9] D. Joyce,A classifying invariant of knots, the knot quandle, J. Pure Appl. Alg.23(1982), 37–65.
[10] S. V. Matvee, Distributive groupoids in knot theory, Mt. Sb. (N.S.) 119(161)(1982), 78–88.
![図 4: 自明ハンドル体結び目 O g 5. 主結果 岩切 [8] は,任意のハンドル体結び目に対して,その Z m -flowed ダイアグラム(m = 2, 3) の Alexander カンドル Z p [t ± 1 ]/(h(t)) ( p :奇素数, h(t)(̸ = t, t − 1) :既約多項式)によ る coloring を用いて,結び目解消数の評価式を得た.以下の定理は,この結果の一般化 である. 定理 5.1](https://thumb-ap.123doks.com/thumbv2/123deta/5932884.2057202/6.892.197.696.101.230/ハンドル体結び主結果ハンドルに対しダイアグラムmカンドル一般化.webp)