平成
23 年度マルチ GNSS 解析技術等の開発にむけた
衛星系の組合せに関する調査検討業務
報告書
- 中間報告 その1 -
平成 24 年 2 月 10 日
国土交通省 国土地理院
目 次 1. はじめに ... 1 1.1. 本書について ... 1 1.2. 調査の概要 ... 1 2. 測位信号の特性の違いによる影響 ... 1 2.1. 測位信号の特性整理 ... 1 2.2. 測位解析に影響する特性の違い ... 2 2.2.1. 信号電力... 2 2.2.2. 変調方式... 2 2.2.3. マルチパス ... 2 2.2.4. 多元接続方式 ... 2 2.3. 受信機・アンテナ特性の評価 ... 7 2.3.1. 評価内容... 7 2.3.2. ANTTOOL... 9 2.3.3. 搬送波電力雑音比(C/N0)の仰角・方位角依存性 ... 10 2.3.4. アンテナ位相特性 ... 12 2.3.5. 擬似距離マルチパス ... 12 2.3.6. 搬送波位相マルチパス ... 13 2.3.7. 受信機ハードウェアバイアス ... 14 2.3.8. GLONASS 受信機チャンネル間バイアス ... 15 3. 時刻系・座標系の違いによる影響 ... 31 3.1. 評価内容 ... 31 3.2. 各衛星系の準拠座標系とITRF との関係 ... 31 3.3. 各衛星系の準拠座標系間の変換(Helmert 変換)パラメータの入手・取扱い方法 ... 34 3.4. 各衛星系の準拠時刻系とUTC との関係 ... 34 3.4.1. GPS 時刻系 ... 34 3.4.2. GLONASS 時刻系 ... 36 3.4.3. QZSS 時刻系 ... 36 3.4.4. Galileo 時刻系 ... 37 3.5. 各衛星系の準拠時刻系間の変換パラメータの入手・取扱い方法 ... 37 4. 軌道暦の精度による影響... 39 4.1. 評価内容 ... 39 4.2. 放送暦 ... 39 4.3. 超速報暦、速報暦 ... 40 5. 測位手法の既存研究調査 ... 42 5.1. 本章の目的 ... 42 5.2. GPS と GLONASS との組合せ ... 42 5.3. 座標系および時刻系 ... 43 6. 複数衛星系組合せが及ぼす影響の理論評価 ... 45 6.1. 観測モデルの一般化 ... 45 6.2. 観測雑音の統計的性質 ... 46 6.3. 各種の誤差源と観測モデル ... 47 6.3.1. 観測雑音の影響について ... 48 6.3.2. マルチパスの影響について ... 48
6.3.3. 受信機ハードウェアバイアスの影響について ... 48 6.3.4. GLONASS 受信機チャンネル間バイアスの影響について ... 48 6.3.5. 軌道暦誤差の影響について ... 49 6.4. 最小二乗法と推定誤差の統計的性質 ... 49 6.5. 測位精度等に生じる影響の評価方法 ... 50 6.6. 衛星系の有無による測位精度の変化について ... 50 7. 計算手法の検討 ... 52 7.1. 検討の方針 ... 52 7.2. 各衛星系の最適重み付け ... 52 7.3. 受信機バイアスの補正 ... 54 7.4. 座標系・時刻系の統合 ... 54 7.5. 各衛星系の組み合わせアルゴリズム ... 56 8. 統計学的手法に基づく検討 ... 62 9. 計算手法のプロトタイプ実装と評価 ... 63 9.1. 評価内容 ... 63 9.2. 各衛星系の組合せによる基線解析 ... 64 9.3. 各衛星系の組合せによる精密単独測位 ... 67 9.4. 異機種間GPS+GLONASS 基線解析での補正効果 ... 68 10. まとめ ... 71 11. 参考文献 ... 73 Appendix 1 GLONASS 受信機チャンネル間バイアスの解析手法 ... 76 Appendix 2 プロトタイプ評価データの衛星状況 ... 79 Appendix 3 測位解析結果の時系列グラフ... 85
図目次 図 2-1 アンテナ位相特性の観測構成 ... 12 図 2-2 8 日間の擬似距離バイアス変化 ... 15 図 2-3 搬送波電力雑音比(C/N0)-仰角 【GPS】 ... 17 図 2-4 搬送波電力雑音比(C/N0)-仰角 【GLONASS】 ... 18 図 2-5 搬送波電力雑音比(C/N0)-仰角 【QZSS】 ... 19 図 2-6 搬送波電力雑音比(C/N0)-方位角 【GPS】 ... 20 図 2-7 搬送波電力雑音比(C/N0)-方位角 【GLONASS】 ... 21 図 2-8 搬送波電力雑音比(C/N0)-方位角 【QZSS】 ... 22 図 2-9 アンテナ位相特性 ... 23 図 2-10 擬似距離マルチパス 【GPS】 ... 24 図 2-11 擬似距離マルチパス 【GLONASS】 ... 25 図 2-12 擬似距離マルチパス 【QZSS】 ... 26 図 2-13 搬送波位相マルチパス 【GPS】 ... 27 図 2-14 搬送波位相マルチパス 【GLONASS】 ... 28 図 2-15 搬送波位相マルチパス 【QZSS】... 29 図 2-16 GLONASS チャンネル間バイアス... 30 図 3-1 座標系の関係図(IS-QZSS ver.1.3 [6]より引用) ... 32 図 3-2 時刻系の関係図 ... 37 図 4-1 放送暦誤差(上:GPS 下:GLONASS) ... 40 図 4-2 超速報暦・速報暦誤差(上:GPS 下:GLONASS) ... 41 図 6-1 GLONASS の有無による測位精度指標 ... 51 図 7-1 マルチパス誤差と観測誤差モデル(JAVAD DELTA, GPS L1) ... 53
表目次 表 2-1 GNSS 測位信号の特性(GPS) ... 3 表 2-2 GNSS 測位信号の特性(GLONASS) ... 4 表 2-3 GNSS 測位信号の特性(QZSS) ... 5 表 2-4 GNSS 測位信号の特性(Galileo) ... 6 表 2-5 測位信号の特性の違いに基づく評価項目と目的 ... 7 表 2-6 特性評価に用いた受信機・アンテナと対応衛星系 ... 8 表 2-7 各データの RINEX 変換方法 ... 8 表 2-8 搬送波電力雑音比(C/N0)観測に用いたアンテナ・受信機と観測期間 ... 11 表 2-9 アンテナ位相特性観測に用いたアンテナ・受信機と観測期間 ... 12 表 2-10 擬似距離マルチパス RMS 値(m) ... 13 表 2-11 搬送波位相マルチパス RMS 値(cm) ... 13 表 2-12 各受信機の GPS-GLONASS ハードウェアバイアス ... 14 表 3-1 各衛星系の準拠時刻系及び座標系の一覧表 ... 33 表 4-1 評価対象の軌道暦と評価期間 ... 39 表 4-2 放送暦評価結果 ... 40 表 4-3 超速報暦・速報暦評価結果 ... 41 表 5-1 文献[23]における GPS+GLONASS 測位解析の Fix 率と精度(一周波) ... 42 表 5-2 文献[23]における GPS+GLONASS 測位解析の Fix 率と精度(二周波) ... 43 表 7-1 観測誤差モデルの係数(a,b)補正値 ... 54 表 7-2 座標系・時刻系の統合手法 ... 55 表 9-1 各データの観測場所 ... 63 表 9-2 各衛星系の組合せによる基線解析 解析条件 ... 65 表 9-3 各衛星系の組合せによる基線解析 解析結果 ... 66 表 9-4 各衛星系の組合せによる精密単独測位 解析条件 ... 67 表 9-5 各衛星系の組合せによる精密単独測位 解析結果 ... 67 表 9-6 GPS+GLONASS 基線解析での補正効果 解析条件 ... 69 表 9-7 GPS+GLONASS 基線解析での補正効果 解析結果 ... 70
1
1.
はじめに
1.1. 本書について
本書は、「平成23 年度マルチ GNSS 解析技術等の開発にむけた衛星系の組合せに関す る調査検討業務」(以下、本調査とする)において実施した調査、解析とその評価結果に ついて記載したものである。1.2. 調査の概要
測位解析に複数の衛星系を利用する場合、GPS のみを利用する場合に比べて捕捉可能 衛星数が増えるため、アベイラビリティの向上やTTFF(Time To First Fix: 最初のアン ビギュイティ決定までに要する時間)の短縮などのメリットが期待できる。一方で、そ れぞれの衛星系ごとに仕様や運用状況が異なるため、それらの違いが測位解析にどの程 度影響するかを考慮して適切に対応することが必要である。複数衛星系の組合せによる 影響は、大別して以下の三項目が挙げられる。 ① 測位信号の特性の違いによる影響 ② 時刻系・座標系の違いによる影響 ③ 軌道暦の精度による影響 本調査ではそれぞれの項目について文献調査を行い、観測データから実際の影響を調 査した。 ①測位信号の特性の違いによる影響については、それぞれの衛星系について実際の観 測データから特性評価を行なった。評価に際しては四種類のGNSS 受信機を用い、受信 機アンテナ特性も合わせて整理した。(2 章) ②時刻系・座標系の違いによる影響については、各衛星系の時刻系・座標系の違いを 整理し、測位解析を行う場合の互換性について評価を行った。(3 章) ③軌道暦の精度による影響では、IGS 精密暦を基準とした場合の暦精度を整理し、そ れらが測位解析に与える影響を整理した。(4 章) 整理と評価を行ったそれぞれの影響において、補正が必要な項目については補正アル ゴリズムを構築してプロトタイプソフトウェアに実装し、実データの測位解析によって 精度検証を行なった。対象とした測位方式は基線解析(短基線・長基線)と精密単独測 位であり、それぞれセンチメートル級の精度で測位解析を行うことを前提とした。2.
測位信号の特性の違いによる影響
2.1. 測位信号の特性整理
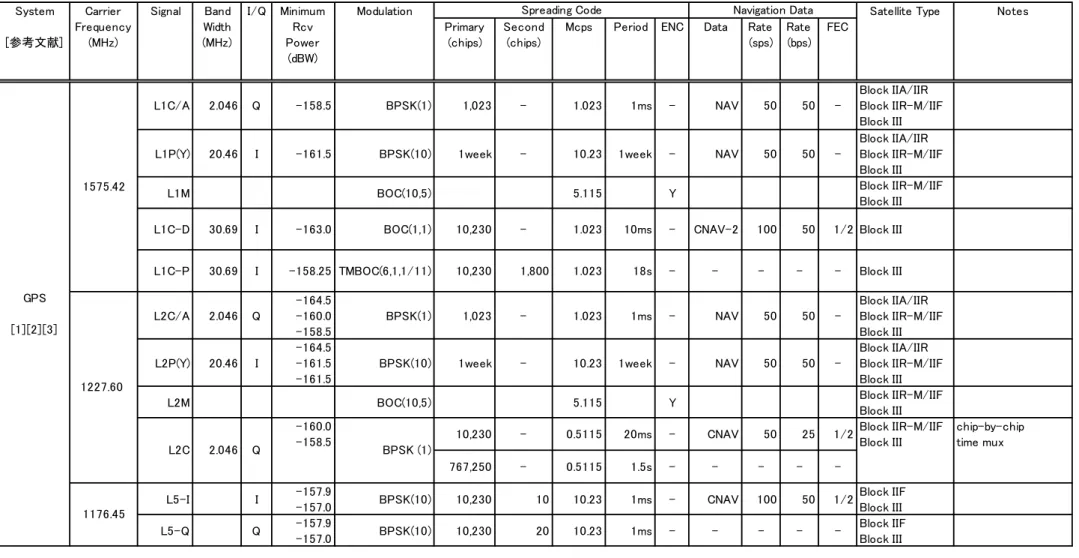
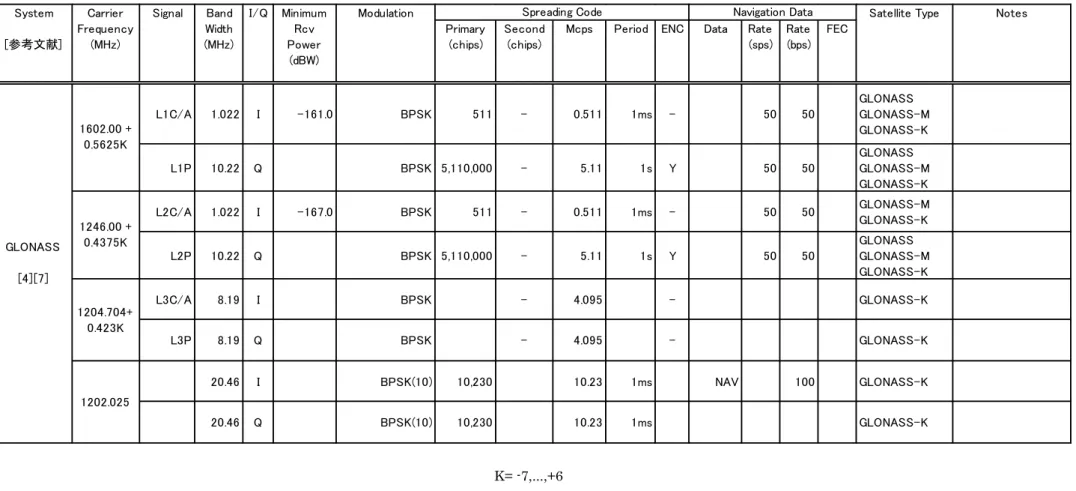
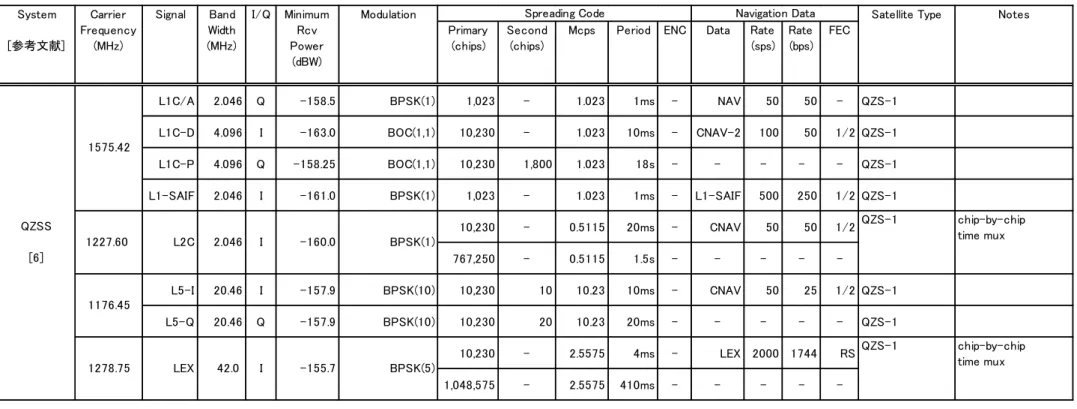
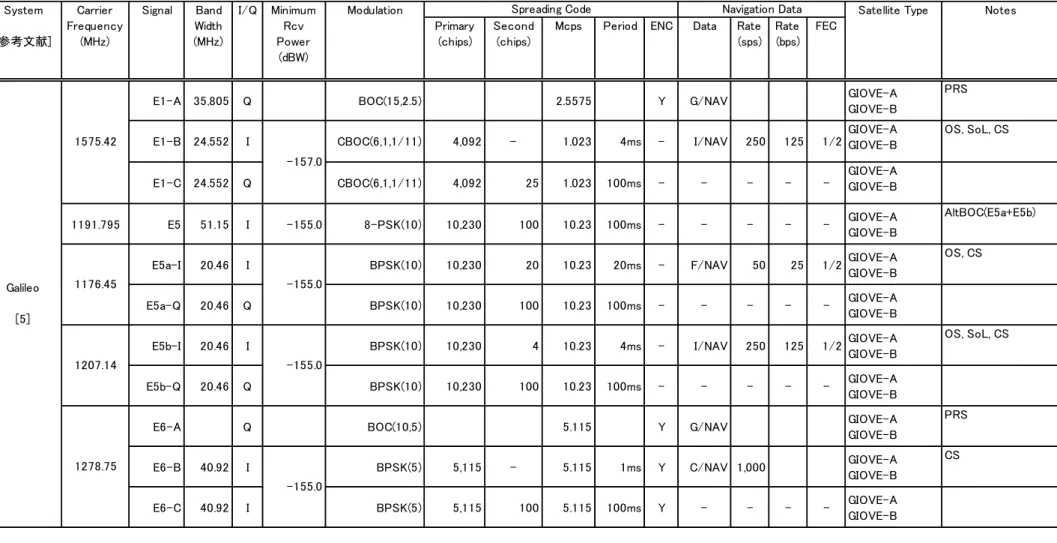
本調査で対象とする衛星系はGPS、GLONASS、QZSS、Galileo とする。ただし、Galileo については調査実施時点で実測データが得られないことから本調査では本項の特性整理2 のみにとどめる。 測位信号の特性の違いによる影響を調査するため、まずはそれぞれの衛星系の測位信 号特性を表 2-1~表 2-3 のとおり整理した(参考文献は表内に記述)。 これらの特性の違いが測位解析に与える影響については次項で整理する。
2.2. 測位解析に影響する特性の違い
2.2.1. 信号電力 信号電力の比較として、最小受信電力(Minumum Rcv Power)の値で整理した。実 際の受信信号電力は、衛星からの送信電力やアンテナの指向性、衛星仰角などにも依存 する。本調査では実際のGNSS 受信機 4 機種で搬送波電力雑音比(C/N0)を実測し、仰 角・方位角に対する特性を評価した。評価結果は「2.3.3. 搬送波電力雑音比(C/N0)の 仰角・方位角依存性」に記述する。 2.2.2. 変調方式Galileo E1 信号は BOC 変調となっており GPS L1C/A や Galileo L1C/A の BPSK 変調 と異なる[26]が、現時点でGalileo が実運用前であり実データ評価が困難であることから、 本調査では変調方式の評価は行わない。 2.2.3. マルチパス 測距性能に影響するものとして、搬送波電力雑音比(C/N0)の他にマルチパスの影響 が挙げられる。GPS・QZSS の L5 帯や Galileo/E5 のような高チップレート(Mcps)の 信号ではマルチパス誤差低減が期待できる[25]。 本調査では、実際のGNSS 受信機 4 機種で GPS・GLONASS の擬似距離マルチパス と搬送波位相マルチパスを実測し、仰角に対する特性を評価した。評価結果は「2.3.5 擬 似距離マルチパス」および「2.3.6 搬送波位相マルチパス」に記述する。 2.2.4. 多元接続方式
GPS、QZSS、Galileo が符号分割多元接続(code division multiple access : CDMA) であるのに対し、GLONASS 信号は周波数分割多元接続(frequency division multiple access: FDMA)である。このため、GLONASS 信号では搬送波位相バイアスの二重差が
整数にならないのでGPS とは異なった手法によるバイアス決定を行う必要がある。更に
異機種のGNSS 受信機では GLONASS 衛星ごとの周波数の違いに起因する回路遅延差 (inter-channel bias または inter-frequency bias)が異なるため、異機種間データの基 線解析では補正が必要となる[22][23]。これらの影響について評価結果は「2.3.8 GLONASS
3
表 2-1 GNSS 測位信号の特性(GPS)
I: In-Phase 同相 Q: Quadrature-Phase 直交位相
ENC: encryption 暗号化 , FEC: forward error correction 前方誤り訂正 , 1/2: 1/2 convolution coding 1/2 畳込み符号化 , RS: Reed Solomon リードソロモン符号 Primary
(chips)
Second (chips)
Mcps Period ENC Data Rate (sps) Rate (bps) FEC L1C/A 2.046 Q -158.5 BPSK(1) 1,023 - 1.023 1ms - NAV 50 50 -Block IIA/IIR Block IIR-M/IIF Block III L1P(Y) 20.46 I -161.5 BPSK(10) 1week - 10.23 1week - NAV 50 50
-Block IIA/IIR Block IIR-M/IIF Block III
L1M BOC(10,5) 5.115 Y Block IIR-M/IIF
Block III L1C-D 30.69 I -163.0 BOC(1,1) 10,230 - 1.023 10ms - CNAV-2 100 50 1/2 Block III
L1C-P 30.69 I -158.25 TMBOC(6,1,1/11) 10,230 1,800 1.023 18s - - - Block III
L2C/A 2.046 Q -164.5 -160.0 -158.5 BPSK(1) 1,023 - 1.023 1ms - NAV 50 50 -Block IIA/IIR Block IIR-M/IIF Block III L2P(Y) 20.46 I -164.5 -161.5 -161.5
BPSK(10) 1week - 10.23 1week - NAV 50 50
-Block IIA/IIR Block IIR-M/IIF Block III
L2M BOC(10,5) 5.115 Y Block IIR-M/IIF
Block III 10,230 - 0.5115 20ms - CNAV 50 25 1/2 767,250 - 0.5115 1.5s - - - - -L5-I I -157.9 -157.0 BPSK(10) 10,230 10 10.23 1ms - CNAV 100 50 1/2 Block IIF Block III L5-Q Q -157.9 -157.0 BPSK(10) 10,230 20 10.23 1ms - - - - -Block IIF Block III System [参考文献] Carrier Frequency (MHz) Signal Band Width (MHz) I/Q Minimum Rcv Power (dBW)
Modulation Spreading Code Navigation Data Satellite Type
Q Block IIR-M/IIF Block III L2C GPS [1][2][3] -160.0 -158.5 2.046 Notes chip-by-chip time mux 1575.42 1227.60 BPSK (1) 1176.45
4
表 2-2 GNSS 測位信号の特性(GLONASS)
K= -7,...,+6
I: In-Phase 同相 Q: Quadrature-Phase 直交位相
ENC: encryption 暗号化 , FEC: forward error correction 前方誤り訂正 , 1/2: 1/2 convolution coding 1/2 畳込み符号化 , RS: Reed Solomon リードソロモン符号 Primary
(chips)
Second (chips)
Mcps Period ENC Data Rate (sps) Rate (bps) FEC L1C/A 1.022 I -161.0 BPSK 511 - 0.511 1ms - 50 50 GLONASS GLONASS-M GLONASS-K L1P 10.22 Q BPSK 5,110,000 - 5.11 1s Y 50 50 GLONASS GLONASS-M GLONASS-K L2C/A 1.022 I -167.0 BPSK 511 - 0.511 1ms - 50 50 GLONASS-M GLONASS-K L2P 10.22 Q BPSK 5,110,000 - 5.11 1s Y 50 50 GLONASS GLONASS-M GLONASS-K L3C/A 8.19 I BPSK - 4.095 - GLONASS-K L3P 8.19 Q BPSK - 4.095 - GLONASS-K 20.46 I BPSK(10) 10,230 10.23 1ms NAV 100 GLONASS-K 20.46 Q BPSK(10) 10,230 10.23 1ms GLONASS-K
Navigation Data Satellite Type Notes System [参考文献] Carrier Frequency (MHz) Signal Band Width (MHz) I/Q Minimum Rcv Power (dBW) 1204.704+ 0.423K
Modulation Spreading Code
1602.00 + 0.5625K 1246.00 + 0.4375K 1202.025 GLONASS [4][7]
5
表 2-3 GNSS 測位信号の特性(QZSS)
I: In-Phase 同相 Q: Quadrature-Phase 直交位相
ENC: encryption 暗号化 , FEC: forward error correction 前方誤り訂正 , 1/2: 1/2 convolution coding 1/2 畳込み符号化 , RS: Reed Solomon リードソロモン符号 Primary
(chips)
Second (chips)
Mcps Period ENC Data Rate (sps) Rate (bps) FEC L1C/A 2.046 Q -158.5 BPSK(1) 1,023 - 1.023 1ms - NAV 50 50 - QZS-1 L1C-D 4.096 I -163.0 BOC(1,1) 10,230 - 1.023 10ms - CNAV-2 100 50 1/2 QZS-1 L1C-P 4.096 Q -158.25 BOC(1,1) 10,230 1,800 1.023 18s - - - QZS-1 L1-SAIF 2.046 I -161.0 BPSK(1) 1,023 - 1.023 1ms - L1-SAIF 500 250 1/2 QZS-1 10,230 - 0.5115 20ms - CNAV 50 50 1/2 767,250 - 0.5115 1.5s - - - - -L5-I 20.46 I -157.9 BPSK(10) 10,230 10 10.23 10ms - CNAV 50 25 1/2 QZS-1 L5-Q 20.46 Q -157.9 BPSK(10) 10,230 20 10.23 20ms - - - QZS-1 10,230 - 2.5575 4ms - LEX 2000 1744 RS 1,048,575 - 2.5575 410ms - - - -
-Modulation Spreading Code Navigation Data Satellite Type Notes System [参考文献] Carrier Frequency (MHz) Signal Band Width (MHz) I/Q Minimum Rcv Power (dBW) QZS-1 I -160.0 BPSK(1) 2.046 QZS-1 chip-by-chip time mux 1176.45 LEX 42.0 I -155.7 BPSK(5) 1278.75 QZSS [6] 1575.42 1227.60 chip-by-chip time mux L2C
6
表 2-4 GNSS 測位信号の特性(Galileo)
I: In-Phase 同相 Q: Quadrature-Phase 直交位相
ENC: encryption 暗号化 , FEC: forward error correction 前方誤り訂正 , 1/2: 1/2 convolution coding 1/2 畳込み符号化 , RS: Reed Solomon リードソロモン符号 Primary
(chips)
Second (chips)
Mcps Period ENC Data Rate (sps)
Rate (bps)
FEC
E1-A 35.805 Q BOC(15,2.5) 2.5575 Y G/NAV GIOVE-A GIOVE-B
PRS
E1-B 24.552 I CBOC(6,1,1/11) 4,092 - 1.023 4ms - I/NAV 250 125 1/2GIOVE-AGIOVE-B OS, SoL, CS
E1-C 24.552 Q CBOC(6,1,1/11) 4,092 25 1.023 100ms - - - - -GIOVE-A GIOVE-B 1191.795 E5 51.15 I -155.0 8-PSK(10) 10,230 100 10.23 100ms - - - GIOVE-A GIOVE-B AltBOC(E5a+E5b)
E5a-I 20.46 I BPSK(10) 10,230 20 10.23 20ms - F/NAV 50 25 1/2GIOVE-A GIOVE-B
OS, CS
E5a-Q 20.46 Q BPSK(10) 10,230 100 10.23 100ms - - - GIOVE-A GIOVE-B E5b-I 20.46 I BPSK(10) 10,230 4 10.23 4ms - I/NAV 250 125 1/2GIOVE-A GIOVE-B
OS, SoL, CS
E5b-Q 20.46 Q BPSK(10) 10,230 100 10.23 100ms - - - GIOVE-A GIOVE-B
E6-A Q BOC(10,5) 5.115 Y G/NAV GIOVE-A
GIOVE-B
PRS
E6-B 40.92 I BPSK(5) 5,115 - 5.115 1ms Y C/NAV 1,000 GIOVE-A GIOVE-B CS E6-C 40.92 I BPSK(5) 5,115 100 5.115 100ms Y - - - - GIOVE-A GIOVE-B Galileo [5] 1575.42 1176.45 1207.14 1278.75 -157.0 -155.0 -155.0 -155.0 Modulation System [参考文献] Carrier Frequency (MHz) Signal Band Width (MHz) I/Q Minimum Rcv Power (dBW)
7
2.3. 受信機・アンテナ特性の評価
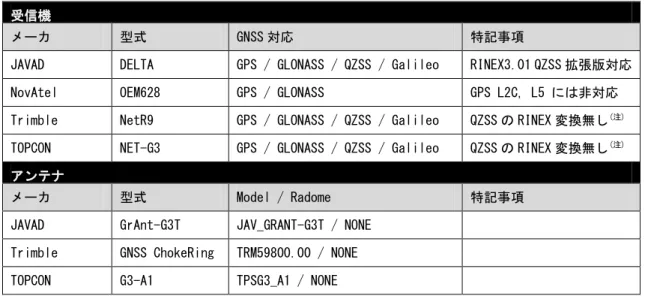
2.3.1. 評価内容 異なる衛星系の信号を組合せて解析する場合、それぞれの測位信号の特性の違いから 重み付けや補正を行う必要がある。本項では実際のGNSS 受信機・アンテナによる特性 評価を行い、その結果を整理する。評価項目と目的は表 2-5 のとおり。 表 2-5 測位信号の特性の違いに基づく評価項目と目的 評価項目 評価目的 ①搬送波電力雑音比(C/N0)の 仰角・方位角依存性 擬似距離・搬送波位相の測距精度の指標である C/N0 を各衛星系 ごとに比較整理し、仰角ごとの重み付けや仰角マスク値など解 析パラメータの参考値とする。 ②アンテナ位相特性 GPS のみの測位解析と同様に、特に異機種受信機間で基線解析を 行う場合の補正値として使用する。 ③擬似距離マルチパス 各衛星系のマルチパス特性を評価するとともに、本調査ではそ れらの実測値から観測誤差モデルを推定し、測位解析で補正値 として適用する。 ④搬送波位相マルチパス ⑤受信機ハードウェアバイア ス 受信機内部の受信回路間遅延が衛星系毎に異なることから衛星 系毎に発生するバイアス値について、実測値からそれらの影響 を評価し、特に精密単独測位での補正値として適用する。 ⑥GLONASS 受信機チャンネル間 バイアス GLONASS 衛星の周波数の違いに起因する回路遅延差から GLONASS チャンネル毎に発生するバイアス値について実測値をまとめ、 測位解析で補正値として適用する。 本章では、それぞれの評価項目について実際の観測データから得た結果をまとめる。 なお、観測データの取得にはGNSS 観測に対応した表 2-6 の受信機を用いた。 また、表 2-5①~④の後処理解析には ANTTOOL2.1 (http://gpspp.sakura.ne.jp/anteva/ anttool.htm)を用いた。ANTTOOL2.1 についての 詳細は次節にまとめる。 ANTTOOL 2.1 は RINEX2.10 に対応となっているため、各メーカの受信機データを RINEX 変換して処理を行なう必要がある。RINEX 変換の方法はメーカごとに異なるが、 本調査で行なったRINEX 変換方法については表 2-7 にまとめる。なお、QZSS データは JAVAD DELTA のみ QZSS 拡張版 RINEX[6]に対応しているため、QZSS データの評価は8
表 2-6 特性評価に用いた受信機・アンテナと対応衛星系 受信機
メーカ 型式 GNSS 対応 特記事項
JAVAD DELTA GPS / GLONASS / QZSS / Galileo RINEX3.01 QZSS 拡張版対応
NovAtel OEM628 GPS / GLONASS GPS L2C, L5 には非対応
Trimble NetR9 GPS / GLONASS / QZSS / Galileo QZSS の RINEX 変換無し(注)
TOPCON NET-G3 GPS / GLONASS / QZSS / Galileo QZSS の RINEX 変換無し(注)
アンテナ
メーカ 型式 Model / Radome 特記事項
JAVAD GrAnt-G3T JAV_GRANT-G3T / NONE
Trimble GNSS ChokeRing TRM59800.00 / NONE
TOPCON G3-A1 TPSG3_A1 / NONE
(注) 公式 RINEX では QZSS に対応されていないので現時点では未対応。 公式RINEX に QZSS が対応され次第対応予定。 表 2-7 各データの RINEX 変換方法 メーカ 受信機固有フォー マットの拡張子 RINEX 変換方法 JAVAD .jps RTKLIB2.4.1(http://www.rtklib.com)に含まれる変換ユーティ リティ RTKCONV により RINEX 2.10 へ変換。
NovAtel .gps NovAtel 社製変換ツール Convert4 3.8.0.6 により RINEX 2.10 へ
変換。
Trimble .T02 Trimble 社製変換ツール ConvertToRinex により RINEX 3.00 へ変
換後、RTKCONV により RINEX 2.10 へ変換。
TOPCON .tps
(BINEX 形式)
teqc(http://facility/unavco.org/software/teqc/teqc.html) により RINEX 2.11 へ変換後、RTKCONV により RINEX 2.10 へ変換。 ただし、S1 の値が P コードによるものなので、TOPCON 社ツール にて C/A コードによる S1 値を別途取得。
9 2.3.2. ANTTOOL 特性評価結果の前に、搬送波電力雑音比(C/N0)、アンテナ位相特性、および擬似距離・ 搬送波位相マルチパスの後処理解析に用いたANTTOOL の処理についての詳細を本節で まとめる。ANTTOOL は東京海洋大・高須氏の作成したデータ処理ツールであり、同様 の説明はhttp://gpspp.sakura.ne.jp/anteva/anteva.htm にも記載されている。 ① 搬送波電力雑音比(C/N0)の仰角・方位角依存性 ターゲット受信機が出力する搬送波電力雑音比(C/N0)と放送暦(ephemeris) により計算した観測時刻の衛星方位・仰角から、C/N0 スカイプロット・C/N0‐仰 角グラフとして描画する。なおC/N0 の代わりに SNR(信号雑音比)を出力する受 信機に関しては以下の概算変換式によりC/N0 に変換して表示する。 (1) ② アンテナ位相特性 (a)ターゲットアンテナ/受信機、基準アンテナ/受信機で取得した L1 搬送波位相 観測値の二重位相差 に関し、観測方程式(2)による基線解析によりターゲット アンテナ位相中心位置を求める。なお基準アンテナ座標は固定し、ターゲットア ンテナ位相中心位置座標及び搬送波バイアスを一定値として推定する。整数バイ アスはFIX せずフロート解として推定する。 (2) ここで は搬送波波長、 は衛星-アンテナ位相中心間の幾何学距離、Nは整数バ イアス、 は観測誤差を示す。 (b) (a)で求めたターゲットアンテナ位相中心位置を固定し、再度ターゲットアンテ ナ/受信機、基準アンテナ/受信機で取得した搬送波位相観測値による二重位相 差 に関し、観測方程式(3)を使った基線解析によりアンテナ位相中心変動パラ メータ及び搬送波位相バイアスを一定値として推定する。ここでアンテナ位相中 心変動 は(4)式に示す球面調和関数により表す。 (3) (4)
10 ここで は正規化ルジャンドル陪関数、 は衛星天頂角、 は衛星方位角であり アンテナ位相中心変動パラメータとして未知係数 を推定する。なお球面調和関数の次数は 10 階 5 次とした。 ③ コードマルチパス (a)基準アンテナ及び受信機で取得した 2 周波搬送波位相観測値 , から以下(5) 式により衛星毎のL1 電離層遅延変動 を求める。 (5) (b)ターゲット擬似距離観測値 及び搬送波位相観測値 のGeometry Free 線形結 合と(a)の電離層遅延変動から以下(6)式によりターゲット受信機のコードマルチ パス+受信機雑音 を抽出する。 (6) (c) (b)で抽出したマルチパス+受信機雑音から running average filter により受信機
雑音成分を低減する。 ④ 搬送波位相マルチパス
(a) ②(b)の推定時に搬送波位相観測値の事後残差及び衛星方位仰角を出力させる。 事後残差には基準受信機を基準としたターゲット受信機の搬送波位相マルチパ ス+受信機雑音が含まれる。
(b) (a)で抽出したマルチパス+受信機雑音から running average filter により受信機 雑音成分を低減する。 2.3.3. 搬送波電力雑音比(C/N0)の仰角・方位角依存性 測位信号の特性の違いによる影響を評価する項目として、まずは搬送波電力雑音比 (C/N0)についてまとめる。搬送波電力雑音比とは 1Hz あたりの搬送波電力と雑音電力 の密度比を表すものであり、単位はdBHz である。この値は受信機における測距性能を 表す重要なパラメータであり、値が小さいほど雑音が大きく測距精度が悪いことを意味 する。
11
本調査においては表 2-6 に挙げた四種類の受信機を用いて 24 時間の GNSS 観測を行 い、受信機で得られたC/N0 観測値を ANTTOOL によって仰角・方位角依存性として整 理した。
観測に用いたアンテナ・受信機とそれぞれの観測期間は表 2-8 のとおり。NovAtel OEM628 と Trimble NetR9 については 1 台のアンテナ(Trimble GNSS ChokeRing)を アンテナ分配器で分配して同時に観測を行った。観測実施場所は東京海洋大学 越中島キ ャンパス第4 実験棟(5 階建)であり、屋上にアンテナを設置してデータを取得した。 表 2-8 搬送波電力雑音比(C/N0)観測に用いたアンテナ・受信機と観測期間 Target 受信機 アンテナ 観測期間 (1Hz 観測) 1 JAVAD DELTA JAVAD GrAnt-G3T 2011/10/22 00:00:00 - 23:59:59 2 NovAtel OEM628 Trimble GNSS ChokeRing 2011/ 9/ 6 00:00:00 - 23:59:59 3 Trimble NetR9 Trimble GNSS ChokeRing 2011/ 9/ 6 00:00:00 - 23:59:59 4 TOPCON NET-G3 JAVAD GrAnt-G3T 2011/11/29 00:00:00 - 23:59:59 得られた搬送波電力雑音比(C/N0)の仰角・方位角依存性は図 2-3~図 2-8 のとおり 各受信機ごと、各衛星系ごとにまとめた。 全般的に、高仰角では伝搬損失が小さいため搬送波電力雑音比(C/N0)も大きくなる。 逆に低仰角では損失が大きくなり雑音が増すため、測位解析では良く知られているよう に仰角マスクを設定して低仰角の信号を除外する。QZSS では仰角 10°以下で急激に劣 化する傾向が見られる。 GPS の L2 帯については L2C と L2P(Y)とに分けて評価した。GPS の L2P(Y)が低く出 るのはAS(Anti Spoofing)による受信感度低下であると考えられるが、L2C は L2P(Y) に比べて5~10dBHz 程度高く得られ、L1C/A に匹敵する値となっている。QZSS の L2 はL2C であるため同様に高い値が得られている。 また、GPS と QZSS の L5 帯では送信電力が高いことから搬送波電力雑音比(C/N0) も高く、測距性能の向上が期待できる。 一方、搬送波電力雑音比(C/N0)の仰角依存性を見ると GPS、GLONASS、QZSS で ほぼ同様の傾向を示していることから、本調査における解析では衛星系ごとに仰角マス ク値と重み付けを区別して設定せず、各衛星系共通の設定で解析を実施する。設定値に ついては「9. 計算手法のプロトタイプ実装と評価」の中で実行する解析毎に記述する。
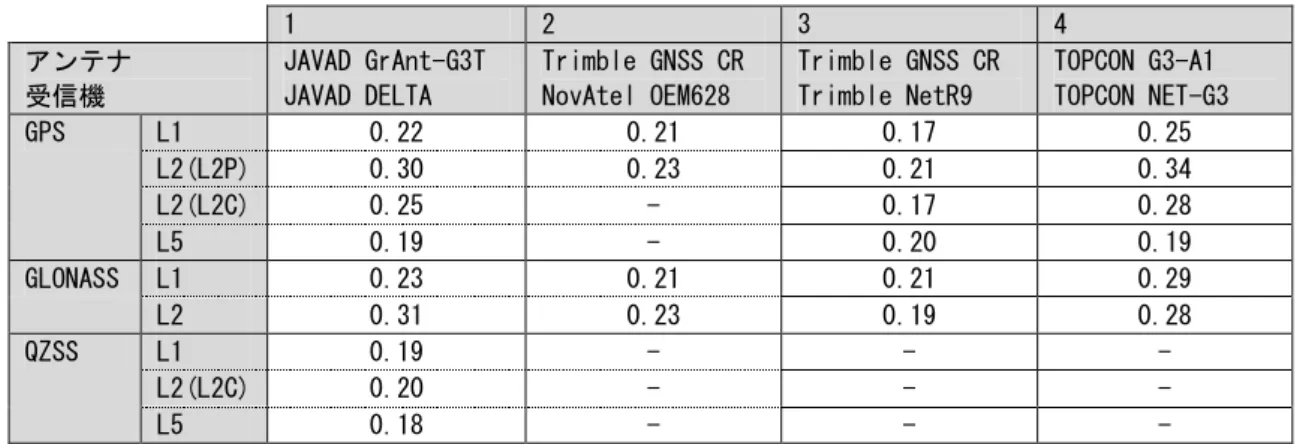
12 2.3.4. アンテナ位相特性 GNSS アンテナ・受信機で信号を受信するとき、機種や周波数の違いによって位相中 心オフセットや特性が異なることから、特に異機種間の精密基線解析を行う場合はこの 特性を把握して補正を行う必要がある。本調査では、表 2-6 に挙げた受信機・アンテナ を用いた観測を行い、ANTTOOL によってそれぞれの位相特性を求めた。 観測では、図 2-1 に示すとおり 2 組の受信機・アンテナによって約 1m 基線データを 取得した。観測実施場所は「2.3.3 搬送波電力雑音比(C/N0)の仰角・方位角依存性」と 同じく東京海洋大学越中島キャンパス第4 実験棟であり、屋上にアンテナを設置して観 測を行った。観測に用いたアンテナ・受信機と観測期間は表 2-9 のとおり。 得られたアンテナ位相特性については図 2-9 のとおり各受信機ごと、各周波数ごとに まとめた。 図 2-1 アンテナ位相特性の観測構成 表 2-9 アンテナ位相特性観測に用いたアンテナ・受信機と観測期間 Target Reference 観測期間 (1Hz 観測) アンテナ 受信機 アンテナ 受信機 1 JAVAD GrAnt-G3T JAVAD DELTA JAVAD GrAnt-G3T JAVAD DELTA 2011/08/30 00:00:00 - 23:59:59 2 Trimble GNSS ChokeRing NovAtel OEM628 JAVAD GrAnt-G3T JAVAD DELTA 2011/09/01 00:59:55 - 23:59:59 3 Trimble GNSS ChokeRing Trimble NetR9 JAVAD GrAnt-G3T JAVAD DELTA 2011/09/02 00:16:20 - 23:59:59 4 TOPCON G3-A1 TOPCON NET-G3 JAVAD GrAnt-G3T JAVAD DELTA 2011/09/03 00:38:07 - 23:59:59 2.3.5. 擬似距離マルチパス 本調査では、各衛星系の周波数ごとのマルチパス特性を評価し、得られた結果から誤 差モデルを推定して測位解析に適用する。本節では「2.3.4 アンテナ位相特性」で取得し (Target) 受信機 (Reference) 受信機 (Reference) Antenna (Target) Antenna 基線長1m
13
たデータ(表 2-9)を用い、GPS、GLONASS、QZSS の擬似距離マルチパスの値を 図 2-10~図 2-12 のとおり仰角依存性として整理した。それぞれの RMS 値については
表 2-10 にまとめた。各衛星系とも共通して RMS で数十 cm レベルのマルチパスが存在 し、低仰角では1m を超える場合も見られる。NovAtel OEM628 と Trimble NetR9 につ いてはChoke Ring アンテナによる計測であったため、これらの値は比較的小さい傾向に ある。 2.3.6. 搬送波位相マルチパス 擬似距離マルチパスと同様に、「2.3.4 アンテナ位相特性」で取得したデータ(表 2-9) を用い、GPS、GLONASS、QZSS の搬送波位相マルチパスの値を図 2-13~図 2-15 の とおり仰角依存性として整理した。また、それぞれのRMS 値は表 2-11 にまとめた。擬 似距離マルチパスがメートル単位であるのに対し、搬送波位相マルチパスはセンチメー トル単位で記載していることに注意されたい。 前節と本節で整理したマルチパスの特性から観測誤差モデルを求めるが、詳細は「7.2 各衛星系の最適重み付け」に記述する。 表 2-10 擬似距離マルチパス RMS 値(m) 1 2 3 4 アンテナ 受信機 JAVAD GrAnt-G3T JAVAD DELTA Trimble GNSS CR NovAtel OEM628 Trimble GNSS CR Trimble NetR9 TOPCON G3-A1 TOPCON NET-G3 GPS L1 0.22 0.21 0.17 0.25 L2(L2P) 0.30 0.23 0.21 0.34 L2(L2C) 0.25 - 0.17 0.28 L5 0.19 - 0.20 0.19 GLONASS L1 0.23 0.21 0.21 0.29 L2 0.31 0.23 0.19 0.28 QZSS L1 0.19 - - - L2(L2C) 0.20 - - - L5 0.18 - - - 表 2-11 搬送波位相マルチパス RMS 値(cm) 1 2 3 4 アンテナ 受信機 JAVAD GrAnt-G3T JAVAD DELTA Trimble GNSS CR NovAtel OEM628 Trimble GNSS CR Trimble NetR9 TOPCON G3-A1 TOPCON NET-G3 GPS L1 0.39 0.32 0.33 0.51 L2 0.55 0.40 0.40 0.49 GLONASS L1 0.43 0.39 0.41 0.42 L2 0.60 0.48 0.40 0.49 QZSS L1 0.32 - - - L2 0.26 - - -
14 2.3.7. 受信機ハードウェアバイアス 受信機ハードウェアバイアスは主に受信機内の各衛星系回路間の遅延差に起因して擬 似距離観測値に現れるバイアスである。特にGPS-GLONASS 間には受信機に依存した数 100ns を超える大きなバイアスが存在することが知られている。本調査では「2.3.3 搬送 波電力雑音比(C/N0)の仰角・方位角依存性」で取得した複数受信機の観測データ(表 2-8) をRTKLIB の単独測位モードで後処理解析することにより受信機ハードウェアバイアス の評価を行なった。RTKLIB の単独測位モードでは衛星系間の擬似距離バイアスを推定 しており、その値を出力させることで擬似距離バイアスが得られる。擬似距離バイアス には各衛星系の時刻系差に起因するオフセットが加算されるため、GPS と GLONASS の 時刻差についてはBIPM Circular T により補正した。具体的には、UTC 時刻を 、GPS
時刻を 、GLONASS 時刻差を とすると (7) (8) ここで、 , は BIPM Circular T の補正項である。 (8)-(7)より、 (9) とすることで、GPS と GLONASS の時刻系差が求まる。したがって、ハードウェアバイ アス は擬似距離バイアス およびGPS と GLONASS の時刻系差から(10)式の通り得 ることができる。 (10) GPS と QZSS の時刻差、および GPS と Galileo の時刻差についてはそれぞれの放送暦 中のGQTO(GPS-QZSS Time Offset)および GGTO(GPS-Galileo Time Offset)パラ メータを使って補正できる。 以上の方法でGNSS 受信機 4 機種について求めたハードウェアバイアスを表 2-12 に 示す。 表 2-12 各受信機の GPS-GLONASS ハードウェアバイアス 受信機 観測期間 (1Hz 観測) 衛星系の時刻系差 GPS-GLONASS ハードウェア バイアス(平均) ハードウェア バイアス(レート) 1 JAVAD DELTA 2011/10/22 00:00:00 - 23:59:59 154.1 ns -543.3 ns -8.9 ns/day 2 NovAtel OEM628 2011/10/22 00:00:00 - 23:59:59 154.0 ns -483.7 ns +1.5 ns/day 3 Trimble NetR9 2011/10/22 00:00:00 - 23:59:59 154.6 ns -501.1 ns -4.4 ns/day 4 TOPCON NET-G3 2011/11/29 00:00:00 - 23:59:59 151.4 ns -592.9 ns -4.0 ns/day 注)4以外は同時観測。
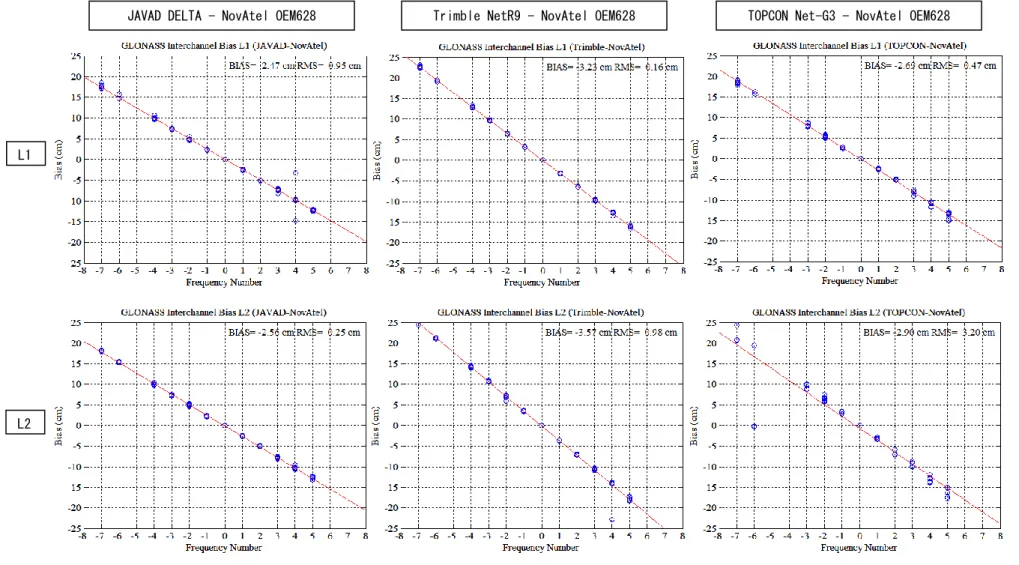
15 得られたハードウェアバイアスは精密単独測位を行う場合の補正パラメータとして使 用する。基線解析においてはGLONASS-GPS 衛星間の差分をとる場合にハードウェアバ イアスが問題となるため通常はGLONASS-GPS 衛星間の差分をとらずに同じ衛星系同 士の差分によって解析を行う。本調査における解析でもGLONASS-GPS 衛星間の差分を とらない方法で基線解析を行った。 また、観測中の温度変化を確認するためGNSS 受信機の筐体表面に温度計を設置して 温度計測も同時に行なったところ、すべてのGNSS 受信機で±3℃以内であった。擬似距 離バイアスの温度依存性を確認するため、JAVAD DELTA のみ別途 8 日間のデータを取 得してその時系列変化を確認したが、今回の観測では特徴的な変化は見られていない(図 2-2)。 図 2-2 8 日間の擬似距離バイアス変化 2.3.8. GLONASS 受信機チャンネル間バイアス GLONASS 受信機チャンネル間バイアスは、受信機・アンテナの群遅延特性の周波数 依存性に伴い、GLONASS FDMA 信号を使った異機種受信機間の基線解析において、擬 似距離および搬送波位相観測値の受信機間一重差に発生するバイアスである。基線解析 において主にGLONASS 搬送波位相観測値の整数アンビギュイティ決定に問題を発生す る。本調査においては、「2.3 受信機・アンテナ特性の評価」で取得したデータを用いて 以下の手順で受信機チャンネル間バイアスを推定し、その特性を評価した。なお、以下 の手順における詳細な解析方法についてはAppendix 1 にまとめた。 -450 -430 -410 -390 -370 -350 2011/12/29 2011/12/30 2011/12/31 2012/1/1 2012/1/2 2012/1/3 2012/1/4 2012/1/5 2012/1/6 擬 似 距 離 バ イ ア ス (n s) DATE
16 ① RTKLIB 2.4.1 を用いて異機種基線の後処理基線解析を行なった。データは 表 2-9 の 1m 基線データを用いた。このとき、GLONASS のアンビギュイティに関 しては整数化をせずフロートで推定し、推定標準偏差とともに出力した。 ② ①で出力した二重差アンビギュイティの小数部分を抽出し、最小二乗推定により GLONASS 衛星毎のバイアスを推定した。 ③ 次に、表 2-8 のゼロ基線データを用いて①②と同様にバイアスを推定し、 ②と③ の比較によりアンテナの群遅延差に起因するチャンネル間バイアスを推定した。 ④ ②と③の結果から GLONASS 衛星毎、異機種受信機間毎のチャンネル間バイアス を推定した。 異機種受信機の組合せとして、1) JAVAD(DELTA)-NovAtel(OEM628)、2) Trimble(NetR9)-NovAtel(OEN628)、3) TOPCON(NET-G3)-NovAtel(OEM628)の三通 りについて評価を行った。求めたバイアスを横軸周波数としてグラフ化したものを図 2-16 に示す。 図 2-16 のとおり、チャンネル間バイアスはチャンネルごとに 3cm 前後ずつ発生し、 チャンネル両端で30cm 以上となることが分かった。各バイアス値は周波数依存のため横 軸を周波数とすると直線で近似できる傾向が得られる。一部アウトライアが見られるが、 アウトライアの目立つFrequency Number = 4 では同日の対象衛星(衛星番号 21)の仰 角が低い時間帯が多いことから、これらは一時的な観測ノイズによるものと考えられる。 これらの原因をより詳細に調査するためには長時間の観測データを取得して傾向を見る 必要がある。 本調査では、ここで得られたバイアス値から補正テーブルを作成して解析時に使用す る。詳細は「7.3 受信機バイアスの補正」に記述する。
17 図 2-3 搬送波電力雑音比(C/N0)-仰角 【GPS】 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA L1 L2 L5 注)縞状に見えるのは NovAtel 受信機 データの分解能によるもの アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 アンテナ JAVAD GrAnt-G3T 受信機 TOPCON NET-G3 L2C L2P(Y) L2C L2P(Y) L2C L2P(Y) L2P(Y)
18 図 2-4 搬送波電力雑音比(C/N0)-仰角 【GLONASS】 L1 L2 注)縞状に見えるのは NovAtel 受信機 データの分解能によるもの アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 アンテナ JAVAD GrAnt-G3T 受信機 TOPCON NET-G3
19 図 2-5 搬送波電力雑音比(C/N0)-仰角 【QZSS】 L1 L5 (データ無し) (データ無し) (データ無し) L2 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ JAVAD GrAnt-G3T 受信機 NovAtel OEM628 アンテナ JAVAD GrAnt-G3T 受信機 Trimble NetR9 アンテナ JAVAD GrAnt-G3T 受信機 TOPCON NET-G3
20 図 2-6 搬送波電力雑音比(C/N0)-方位角 【GPS】 L1 L5 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ JAVAD GrAnt-G3T 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 L2 L2C
21 図 2-7 搬送波電力雑音比(C/N0)-方位角 【GLONASS】 L1 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ JAVAD GrAnt-G3T 受信機 TOPCON NET-G3 L2 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9
22 図 2-8 搬送波電力雑音比(C/N0)-方位角 【QZSS】 L1 L5 (データ無し) (データ無し) (データ無し) L2 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ JAVAD GrAnt-G3T 受信機 NovAtel OEM628 アンテナ JAVAD GrAnt-G3T 受信機 Trimble NetR9 アンテナ JAVAD GrAnt-G3T 受信機 TOPCON NET-G3
23 図 2-9 アンテナ位相特性 L1 L2 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9
24 図 2-10 擬似距離マルチパス 【GPS】 L1 L5 L2 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 L2C L2P(Y) L2P(Y) L2C L2P(Y) L2C L2P(Y)
25 図 2-11 擬似距離マルチパス 【GLONASS】 L1 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 L2
26 図 2-12 擬似距離マルチパス 【QZSS】 アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 (データ無し) (データ無し) (データ無し) アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA L2 L1 L5
27 図 2-13 搬送波位相マルチパス 【GPS】 L1 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 L2
28 図 2-14 搬送波位相マルチパス 【GLONASS】 L1 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 L2
29 図 2-15 搬送波位相マルチパス 【QZSS】 アンテナ Trimble GNSS ChokeRing 受信機 NovAtel OEM628 アンテナ TOPCON G3-A1 受信機 TOPCON NET-G3 アンテナ Trimble GNSS ChokeRing 受信機 Trimble NetR9 (データ無し) (データ無し) (データ無し) L1 アンテナ JAVAD GrAnt-G3T 受信機 JAVAD DELTA L2
30
図 2-16 GLONASS チャンネル間バイアス L1
L2