博 士 論 文
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evaluation of tibial rotation
東北文化学園大学大学院
健康社会システム研究科健康福祉専攻
川上 真吾
Shingo KAWAKAMI
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
― 目次 ―
表一覧 図一覧 要旨
第1章 序論
1-1 研究背景 ・・・・2
1-2 臨床における片脚膝立ち位保持課題の捉え方 ・・・・5 1-3 片脚膝立ち位保持課題の圧中心制御(COP 制御) ・・・・8 1-4 片脚膝立ち位保持課題における階層構造 ・・・・12
第2章 下腿回旋機能について
2-1 下腿回旋運動に関する運動学・運動力学 ・・・・14
2-2 方向転換に関する研究 ・・・・18
第3章 下腿回旋機能評価の開発
- sine wave tandem gait テストに関する運動学的分析 -
3-1 目的 ・・・・22
3-2 対象 ・・・・22
3-3 説明と同意 ・・・・22
3-4 方法 ・・・・23
3-5 結果 ・・・・26
3-6 考察 ・・・・28
第4章 下腿回旋機能評価の開発
- sine wave tandem gait テストに関する運動力学的分析 -
4-1 目的 ・・・・31
4-2 対象 ・・・・31
4-3 説明と同意 ・・・・32
4-4 方法 ・・・・32
4-5 結果 ・・・・36
4-6 考察 ・・・・38
第5章 下腿回旋機能評価の開発
- 下腿回旋機能評価の基準関連妥当性の検討について -
5-1 目的 ・・・・41
5-2 対象 ・・・・42
5-3 説明と同意 ・・・・42
5-4 方法 ・・・・42
5-5 結果 ・・・・44
5-6 考察 ・・・・45
第6章 下腿回旋機能評価の開発における課題
6-1 本研究における課題から臨床応用に向けて ・・・・47
第7章 付録
参考文献 ・・・・49
研究成果 ・・・・57
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
― 表一覧 ―
表 1 片脚膝立ち位保持時間と股関節外転筋における筋力発揮特性との関係
表 2 片脚膝立ち位保持課題におけるCOGおよびCOPのMPF 表 3 片脚膝立ち位保持課題における各体節角度および角度範囲
表 4 膝関節回旋角度に関する報告 表 5 各体節角度
表 6 実験 3:sine wave tandem gait テストにおける膝関節回旋角度および範囲(n=10)
― 図一覧 ―
図 1 片脚膝立ち位保持における身体と関節の安定性
図 2 片脚膝立ち位保持課題における支持基底面と安定性限界 図 3 股関節外転筋の時間-力曲線に関する用語の整理
図 4 バランス制御における重心(COG)と圧中心(COP)の関係 図 5 下腿回旋運動による COP 制御 (参考例)
図 6 各体節角度算出における定義
図 7 片脚膝立ち位保持課題における体節間の協調性 図 8 片脚膝立ち位保持課題における階層構造 図 9 膝関節回旋(水平面)
図 10 膝関節水平軸
図 11 ハムストリングスにより膝関節回旋運動 図 12 膝関節回旋に関与する筋群
図 13 歩行能力テスト 図 14 Turn のパターン 図 15 半径 1m の円歩行
図 16 椅子から立ち上がってクロスオーバーターンおよびサイドステップターン 図 17 直進歩行からクロスオーバーターンおよびサイドステップターン
図 18 Sine wave 歩行路およびタンデム歩行
図 19 異なる Sine wave 歩行路およびタンデム歩行 図 20 マーカー貼付位置
図 21 膝関節屈曲に伴う大腿骨外側上顆と腸脛靭帯の位置関係
図 22 Sine wave tandem gait テストにおける各体節角度の時系列変化 (参考例)
図 23 実験 1 に関する使用機器および測定環境 図 24 実験 2 に関する使用機器および測定環境 図 25 実験 3 に関する使用機器および測定環境
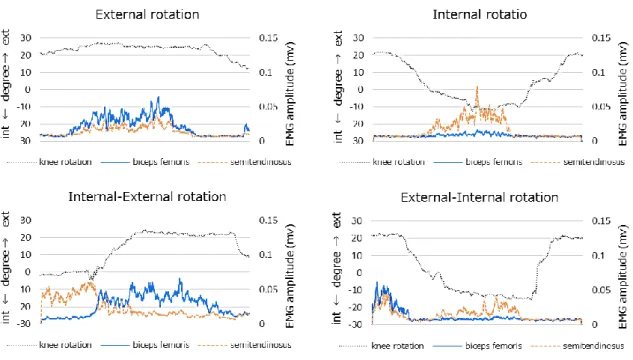
図 26 実験 1:4 課題における膝関節回旋角度と筋活動の時系列変化(参考例)
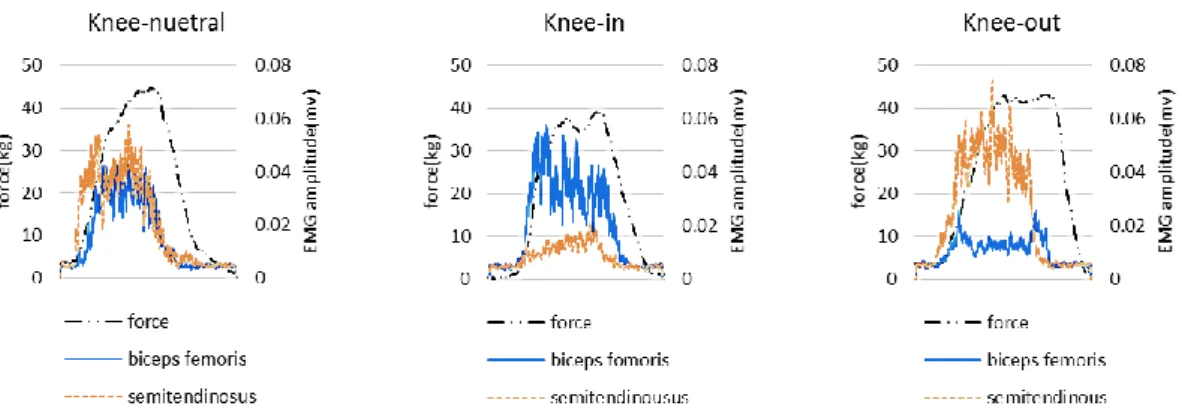
図 27 実験 2:3 課題における床反力と筋活動の時系列変化(参考例)
図 28 実験 3:sine wave tandem gait テストにおける膝関節回旋角度と 筋活動の時系列変化 (参考例)
図 29 計測 1:10m 最大歩行テストの計測
図 30 計測 2:sine wave tandem gait テストの計測 図 31 片脚膝立ち位保持課題との相関関係
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
― 要旨 ―
臨床場面においては,下腿回旋機能の評価および治療は,変形性関節症患者や ACL 損傷患 者等を対象に実施されている。特に,ACL 損傷患者を含むハイパフォーマンス者では,余暇 活動の充実やスポーツ復帰を望む場合も多く,方向転換に伴うステップ動作(クロスオーバ ーステップ,サイドステップ等)での下腿回旋機能に着目する機会も多い。ところが,荷重 下における下腿回旋機能評価に対する重要性は指摘されているものの,これまでの先行研 究からは臨床場面で簡便に使用可能な評価の開発までには至らず,現在も主観的な評価に 依存せざるを得ないのが現状である。したがって,臨床で簡便に評価が可能な下腿回旋機能 評価の開発は,これまでの評価および治療に客観的データを与えることから大きな意味を 持つと確信している。その評価の開発にあたっては,運動行動の階層性による観点や先行研 究から方向転換課題が妥当であると考えている。ここで,先行研究における方向転換課題の 問題点を整理すると,被験者間で下腿回旋角度変化に影響を及ぼす「ステップ幅」「軸足の 向き」「軸足の heel off のタイミング」の統制が難しい側面があった。そこで,sine wave 状の歩行路を作成し,その歩行路をタンデム歩行するという課題(以下,sine wave tandem gait テスト)を考案した。
まず,はじめに,運動学および運動力学的観点から sine wave tandem gait テストを分 析した。その結果,方向転換において広い範囲での下腿回旋角度を有し,大腿回旋運動方向 に対し,下腿は逆方向の回旋運動をつくりだしていることが明らかとなった。さらに,下腿 回旋運動における制御では,主動作筋である下腿回旋筋群の課題特異的な作用が認められ た。よって,sine wave tandem gait テストが下腿回旋運動を基本とした課題であること が示唆された。そのうえで,基準関連妥当性について検討した。結果,sine wave tandem gait テストの所要時間と外的基準との間に相関関係が認められたことから,下腿回旋機能 評価としての有効性が示唆された。
ただし,臨床応用には,課題も残る。1 点目の課題は,sine wave tandem gait テストが 忠実に下腿回旋機能を反映した評価として成立しているか否かである。例えば,下腿回旋角 度に制限がある場合,テストの遂行そのものが困難となるのか,それとも大腿回旋運動によ る代償が可能となるのか,その課題特異性については不明確な点を含んでいる。2 点目の課 題は,基準関連妥当性についてである。本研究では健常成人を対象としたことから,今後は 高齢者や ACL 損傷患者など下腿回旋機能を中心とした障害を対象にした検証が必要である。
以上の課題を段階的に明確化することで,方向転換を用いた下腿回旋機能評価として臨 床応用が可能になると考えている。また,逆の見方をすれば,テスト自体を反復することに より下腿回旋機能に特化した運動療法としての効果も期待できる。特に,変形性関節症患者 や ACL 損傷患者を含むハイパフォーマンス者等において,比較的早期の運動療法への展開 が期待できる。荷重下における下腿回旋機能評価が主観的な評価および治療から客観的な 評価・治療に代わる意義は大きいと考えている。
1
第1章
序論
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
2 第1章 序論
1-1 研究背景
日常生活のみならず,余暇活動の充実やスポーツ(特に対人型球技)において下腿回旋機 能(下腿回旋:大腿骨に対する下腿の回旋=膝関節回旋)は重要な要素の一つである。よっ て,臨床場面においては,下腿回旋機能に影響を受けやすい変形性関節症患者や ACL 損傷患 者等を対象に評価および治療が展開されている。特に,ACL 損傷患者を含むハイパフォーマ ンス者では,余暇活動の充実やスポーツ復帰を望む場合も多く,方向転換に伴うステップ動 作(クロスオーバーステップ,サイドステップ等)1-4)場面での下腿回旋機能に着目する機 会も多い。ところが,下腿回旋機能評価に対する重要性は認識されているものの,これまで の先行研究からは臨床場面で簡便に使用可能な評価および治療の開発までには至っていな い。そのため,現在も主観的な評価および治療に依存せざるを得ないのが現状である。した がって,我々は下腿回旋機能に焦点を当てた評価および治療に関する研究を進めてきた。
修士課程では,理学療法分野でも馴染み深い膝立ち位に着目した。その中でも,特に難易 度が高いとされる,片脚膝立ち位保持5)における下腿回旋運動に関して研究を行った。すな わち,姿勢特異性からすると,非荷重での下腿回旋機能を評価することを意図したもの であった。次節も含め,本研究における基準関連妥当性にも関係するので,以下に研究の要 点をまとめる。
膝立ち位は,日常の様々な場面で要求される姿勢のひとつであり6),特に文化や職業,理 学療法における治療との関連が強いとされる。文化との関連については,中東やアジア諸国 と結びつきが強いのが特徴である。なぜなら,宗教活動に代表される祈りの姿勢において必 要不可欠な能力7-9)とされているからである。また,日本文化においても膝立ち位は,日本 の生活様式が坐を中心としたもの10)であることから,重要な姿勢といえる。それゆえ,理 学療法分野において,膝立ち位を評価や治療の対象とすることが多い。運動機能からみると 膝立ち位では足関節によるバランス制御を利用できず,股関節による姿勢制御が中心とな らざるを得ない 11)ことから,股関節制御に焦点をあてた評価および,治療に応用できると 理解されている。一方,難易度の高いバランス課題である片脚膝立ち位保持課題においては,
運動学・運動力学的データは我々の知る限りなかった。したがって,臨床場面において,バ ランス能力が低下した者に対し,単純に片脚膝立ち位保持課題を練習させて能力が改善し たとしても,真の意味で適切な理学療法を実施したことにはならない。本来であれば,使用 したバランス課題の特異性を考慮して,可能な限り具体的にバランス能力を低下させてい る原因に介入することが理学療法士には求められている。一般的にバランス課題は,重心の 移動の有無により静的バランスと動的バランスに分類される。同じ姿勢保持課題が遂行で きないとしても,考えられる原因は複数ある可能性があり,まずは課題特異的な運動機能と の対比において原因を特定することが重要となる。
そこで,我々は片脚膝立ち位保持課題における姿勢制御に関して,以下の 4 つの観点から 課題特異性を明らかにしてきた。すなわち,第 1 に「片脚膝立ち位保持時間と股関節外転筋
3 の筋力発揮特性との関係」,第 2 に「片脚膝立ち位保持課題における体重心(以下,COG)と 圧中心(以下,COP)の関係」,第 3 に「片脚膝立ち位保持課題における COP 制御 ∼下腿回旋 機能について∼」,第 4 に「片脚膝立ち位保持課題における運動学的特異性 ∼各体節角度およ び角度範囲について∼」である。その結果,片脚膝立ち位保持課題を可能にする条件を整理 することができた。まず,はじめに非支持側の骨盤下制を抑止可能な股関節機能が確保され ていることが前提となること。次に,COG 制御により頭部・上肢・体幹(head arm and trunk:
HAT)の安定性が担保されている条件下では,約 2 Hz におよぶ下腿回旋運動による COP 制 御を基本としてバランスを制御していること12-13)。そして, COG と COP の大きなずれに 対してすばやく対応可能な COG 制御によって COG を一定の位置に保持していること14)。 その際,各体節間における協調性が重要であることが明らかとなった 15)。つまり,保持を 可能にするための階層構造が存在していると推察された。したがって,運動機能の観点から 片脚膝立ち位保持課題は,非荷重における下腿回旋機能の評価および治療に応用できる可 能性が示唆された。臨床応用への可能性を示した,研究結果は臨床場面において有益なもの であった。ただし,股関節による COG 制御を含んでいる点を考慮する必要はある。
ところで臨床場面においては,下腿回旋機能の評価および治療は,変形性関節症患者や ACL 損傷患者等を対象に実施されていることを前述した。特に,方向転換に伴うステップ動 作(クロスオーバーステップ,サイドステップ等)1-4)場面での下腿回旋機能に着目する機 会も多い。身体運動においては,重力と床反力の作用線の距離がモーメント・アームとなり 回転力を生み,それを利用し始動と制動に役立てている。重心移動を伴う運動,すなわち歩 行においては,そのような機構を活用するが,ステップ動作に代表される方向転換のように 水平面における回旋運動においては筋トルク(筋粘弾性を含む)による制御が重要であると 認識されている。つまり,臨床場面においては,非荷重下のみならず荷重下での下腿回旋機 能に関する評価および治療の重要性が指摘されているのである。しかしながら,これまでの 我々の研究や先行研究からは臨床場面で簡便に使用可能な荷重下での評価の開発までには 至っていない。したがって,臨床で簡便に評価が可能な荷重下での下腿回旋機能評価の開発 は,これまでの評価および治療に客観的データを与えることから大きな意味を持つと確信 している。その評価の開発にあたっては,運動行動の階層性による観点や先行研究から方向 転換課題が妥当であると考えている。ここで,先行研究における方向転換課題の問題点を整 理すると,被験者間で下腿回旋角度変化に影響を及ぼす「ステップ幅」「軸足の向き」「軸足 の heel off のタイミング」による動作の統制が難しい側面があった。そこで,sine wave 状の歩行路を作成し,その歩行路をタンデム歩行するという課題(以下,sine wave tandem gait テスト)を考案した。この課題設定により,被験者間での,統制されたデータを基に,
方向転換を用いた荷重下での下腿回旋機能評価の開発が可能であると考えた。
以上の背景から,臨床で簡便に評価が可能な方向転換を用いた下腿回旋機能評価の開発 を目的に以下の構成で論文をまとめた。第 1 章では本研究の理解のために修士課程で取り 組んだ「片脚膝立ち位保持課題の運動学・運動力学的解釈」を記載した。さらに,第 2 章で
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
4 は下腿回旋機能評価の開発に向け,下腿回旋機能を解剖学,運動学・運動力学的観点からま とめた。また,これまで報告された方向転換課題における解析方法を整理し,下腿回旋機能 評価の開発にあたっての問題点を抽出した。本論では,荷重下での下腿回旋機能評価として 作成した sine wave tandem gait テストにおける運動学および運動力学的な分析結果を,
第 3 章「sine wave tandem gait テストに関する運動学的分析」,第 4 章「sine wave tandem gait テストに関する運動力学的分析」としてまとめた。その結果,sine wave tandem gait テストは,下腿回旋機能を中心とした課題であることが示唆された。よって,第 5 章では
「下腿回旋機能評価としての sine wave tandem gait テストにおける基準関連妥当性につ いて」記載した。sine wave tandem gait テストは忠実に下腿回旋機能を反映したテスト であることが明らかとなったが,実用に向けては,まだ課題を含んでいる。そこで最後に,
第 6 章において sine wave tandem gait テストの実用に向けた課題をまとめた。
5 1-2 臨床における片脚膝立ち位保持課題の捉え方
運動機能からみると片脚膝立ち位保持課題も膝立ち位保持課題と同様に,足関節による バランス制御を利用できず,股関節による姿勢制御が中心とならざるを得ない11)ことから,
COG 制御に焦点をあてた評価および治療に応用できると理解されてきた。なぜなら,力学に おける平衡の観点から,支持側股関節では,頭部・上肢・体幹(head, arm and trunk: HAT)
と挙上下肢の重量による内転モーメントと釣り合うように筋張力によって外転モーメント を生みだす必要がある(回転モーメントの釣り合い)。つまり,非支持側下肢を挙上し,片 脚膝立ち位保持を制御する為には,支持側下肢の股関節外転筋による最大筋力(静特性)が 必須条件という解釈である(図 1)16)。
図 1 片脚膝立ち位保持における身体と関節の安定性
A:体重心(重力の作用点)と圧中心(床反力の作用点)の関係。両者の作用線が重なり同じ力で 作用しているならば身体は静止することができる。また.作用線がずれた場合には身体は回転す る。B:股関節の高さで.それ以上の重力モーメントと筋モーメントが釣り合うならば関節運動が生 じない。このとき.モーメントだけでなく力も釣り合う必要があり.関節軸上に床反力が生じる。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
6 ただし,重心は拍動等により絶えず変動を繰り返していることから,その変動に対し姿勢 を制御する必要がある。片脚膝立ち位保持課題では,支持基底面が前後方向に比し左右方向 で非常に狭いのが特徴(図 2)であることから,重心位置の制御は股関節の内外転方向への 運動を基本としている。その重心位置の制御に関する外転モーメントにおいては,狭小化し た支持基底面内に重心を留めるために,より素早く重心位置を制御することが必要である。
したがって,股関節外転筋の筋力発揮特性との関連が重要な要素の 1 つである。我々の研究 により,片脚膝立ち位保持の際に,COG と COP の大きなずれに対してすばやく対応可能な COG 制御によって COG を一定の位置に保持していることを明らかにした(図 3,表 1)14)。
図 2 片脚膝立ち位保持課題における支持基底面と安定性限界 A:膝立ち位 B:片脚膝立ち位:支持基底面は前後方向に比し左右 方向で非常に狭い。圧中心は脛骨粗面付近に位置している。
7 図 3 股関節外転筋における時間-力曲線に関する用語の整理
表 1 片脚膝立ち位保持時間と股関節外転筋における筋力発揮特性との関係
片脚膝立ち位保持時間と最大トルク・最大トルク変化率・到達時間の関係については.右下 肢の開眼保持時間と到達時間に負の相関が認められた(r =-0.56、p <0.01)。したがって.
COG と COP の大きなずれ対し到達時間の作用により COG を一定の位置に保持しているこ とが明らかとなった。左下肢においては.負の相関を示さなかったが laterality による影響が 示唆された。
最大トルクは筋活動開始からトルク値が最大となった値を示す。最大トルク変化率は筋活動 開始からトルク変化率が最大となった値を示す。到達時間は筋活動開始から最大トルク変 化率までの時間を示す。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
8 1-3 片脚膝立ち位保持課題における COP 制御
これまで片脚膝立ち位保持課題における姿勢制御においては,股関節による COG 制御を 基本としていると認識されてきた。しかしながら,我々の研究におけるに観察では,長時間 保持が可能な被験者の特徴として下腿の回旋が観察された 14)。つまり,片脚立位保持にお ける距骨下関節での内反・外反による制御17-19)を片脚膝立ち位保持では下腿回旋運動によ って制御している可能性が考えられた。三次元解析装置を用いて座標データから COG およ び COP を算出し関係性を分析した結果,COG の変動に一致するように COP の変動が認められ た(図 4)12)。また,動作の安定したデータを切り出し高速フーリエ変換(FFT)にて平均パ ワー周波数(mean power frequency : MPF)を算出すると,周波数成分は,COG で 0.4±0.2Hz,
COP で 2.1±03Hz を示した(表 4)13)。
図 4 バランス制御における重心(COG)と圧中心(COP)の関係
( Hz ) 0.4 ± 0.2
( 中央値 )
( Hz ) 2.1 ± 0.3
( 中央値 )
全体(n=28)
項目 単位 MPF
COP
0.4 2.1 COG
表 2 片脚膝立ち位保持課題における COG および COP の MPF
COP の制御による 2.1Hz は.片脚立位保持において側方安定性に寄与する距骨下関節で の内反・外反運動の周波数 2Hz 以上であるとする報告と一致している。また.それぞれの支 持基底面の形状においても.前後方向に比し.左右方向が非常に狭いという点で共通性を 認める。
9 さらに,この COP 制御については,パワースペクトル波形による分析から下腿回旋運動に よって制御されていることが明確となった(図 5)13)。つまり,正常なバランス保持のメ カニズムにしたがい,重心を安定させるために COG よりも COP を制御することが優先され
20),約 2Hz におよぶ下腿回旋運動による制御を基本としていることが明らかとなった。
図 5 下腿回旋運動による COP 制御 (参考例)
被験者 1 から 3 において.下腿回旋の変動成分は複数のピークを示し.COG および COP の各々のピークと 重なった(右下段の図は模式図)。下腿回旋角度を.大腿骨内外側上顆を結んだ線と内外果を結んだ線とのな す角としたことから.大腿が静止し下腿が回転する純粋な下腿回旋運動のみならず.下腿が静止し大腿が回 転する大腿の前額面上での回転運動についても相対的には下腿回旋運動として計測されたためである。大腿 の前額面上での回転運動に伴う HAT の運動は.COG の変動として捉えられることから.下腿回旋の変動成 分のピークとも重なりを示した。COP の変動成分と下腿回旋の変動成分のピークの重なりについては.本来 の意味での下腿回旋運動により COP 制御がなされていることを意味している。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
10 くわえて,運動学的観点からも分析を実施した(図 6)。特に,支持基底面の特徴から前額 面における体幹傾斜角度,骨盤傾斜角度,大腿傾斜角度,下腿回旋角度および協調性が重 要であることを指摘してきた(表 3)。類似した高度なバランス課題である片脚立位保持課 題に比し有意に大きな角度範囲での制御を必要とするのが特徴の 1 つである15)。
図 6 各体節角度算出における定義
A:片脚膝立ち位保持の力学的平衡 B ・ C:片脚膝立ち位保持課題における各体節角度
体幹傾斜角度は左右肩峰を結んだ線と水平線とのなす角.骨盤傾斜角度は左右 ASIS を結んだ線と水平線と のなす角.大腿傾斜角度は左内外側上顆を結んだ線と水平線とのなす角.下腿回旋角度は左大腿骨内外側 上顆を結んだ線と左内外果を結んだ線とのなす角と定義した。
表 3 片脚膝立ち位保持課題における各体節角度および角度範囲
下腿回旋運動が 21.9 ± 2.6°の角度範囲を示した。一般的な直進歩行における下腿回旋角度範囲は約 9°
前後であるとした報告 21)と比較すると.約 10°大きな値であった。片脚膝立ち位保持課題を練習することは.
直進歩行のような生活動作能力の改善よりもむしろ.方向転換のような下腿回旋機能を必要とする動作と関 連している可能性を示唆している。
11 もう 1 つの特徴としては,バランスのとれた状態では,隣接する各体節間の協調性が重要 でな点である。具体的には,体幹傾斜角度と骨盤傾斜角度,骨盤傾斜角度と大腿傾斜角 度,大腿傾斜角度と下腿傾斜角度,加えて,COG の制御に関与している体幹傾斜角度と COP の制御に関与している下腿回旋角度間である。角度変化における広い範囲での協調性 は COG と COP の位置が重なるように制御しており,狭い範囲での変動はその状況に応じた 微調整を行っていることが明らかにした(図 7)15)。
図 7 片脚膝立ち位保持課題における体節間の協調性
片脚膝立ち位保持課題では.積極的な圧中心の制御が基本となっているが.下腿・足部が形成する支持基底 面にいては前後方向に比し.左右方向で非常に狭いことから.重心線と圧中心が大きくずれた際には.すば やく対応可能な体重心の制御が必要と報告されている 14)。体重心の制御に関与する体幹傾斜角度と圧中心 の制御に関与する下腿回旋角度間に協調性が認められたことは.体重心制御と圧中心制御が相互に関与し ていることを裏付けている。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
12 1-4 片脚膝立ち位保持課題における階層構造
片脚膝立ち位保持課題を可能にする階層構造(図 8)について整理する。まず,はじめに 非支持側の骨盤下制を抑止可能な股関節機能が確保されていることが前提となること 16)。 次に,COG 制御により頭部・上肢・体幹(head arm and trunk: HAT)の安定性が担保され ている条件下では,約 2Hz におよぶ下腿回旋運動による COP 制御を基本としてバランスを 制御していること12-13)。そして, COG と COP の大きなずれに対してすばやく対応可能な COG 制御によって COG を一定の位置に保持している14)。この際,各体節間の協調性による 調整が行われている 15)。したがって,運動機能の観点から片脚膝立ち位保持課題は,非荷 重における下腿回旋機能の評価および治療に応用できる可能性が示唆された。ただし,股関 節による COG 制御を含んでいる点を考慮する必要はある。
図 8 片脚膝立ち位保持課題における階層構造
13
第2章
下腿回旋機能について
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
14 第2章 下腿回旋機能について
2-1 下腿回旋運動(膝関節回旋運動)の運動学・運動力学について 立位を含む下腿回旋運動の基礎について記した。
2-1-1 脛骨大腿関節の骨運動(Osteokinematics at the Tibiofemoral joint)
膝関節の屈曲と伸展は,内外の回転軸回りで生じる。可動域は年齢や性別によって異なる が,一般的には屈曲 130—140°,過伸展 5—10°である。
屈伸運動での内外側の回転軸位置は固定されておらず,大腿骨顆内で移動する。その曲線 の軸軌跡は縮閉線(evolute)または回転の瞬間中心としてしられる。
脛骨の内旋と外旋(internal and external)は,垂直軸または長軸回りの水平面で生じ る(図 9)。大腿骨と脛骨の顆部が平行であるとき 0°としている(図 10)22)。この運動は,
体軸回旋と呼ばれる。膝関節完全伸展位では約 5-10°外旋位となる23-25)しかし,正常な関 節可動域でさえも,その計測は限られたものであって数値も様々である(表 4)26-28)。なぜ なら,三次元動作解析装置による体表マーカーを用いる際には,軟部組織によるアーチファ クトの影響がある 29)。また,カッティングのように動作においては,その影響よりを受け ることになる 30)。理想的な解決策として骨ピンマーカー21)があるが現実的とはいえないこ とから,詳細な三次元運動の定量化が難しく,正常値については疑問が残る。ただ,計測結 果が限られているにしても,脛骨の潜在的な可動性についての共通した見解をもつことは 重要である。一般的に,水平面での回旋運動は膝関節屈曲角度の増加とともに増加するとさ れるが幅がある。ただし,脛骨回旋可動域が膝関節伸展位で著名に減少することについては 一致した見解である31-34)。また,外旋の可動域は,一般的に内旋よりも大きく 2:1 の比率 という報告28)がある一方で,ほぼ同じとの見解もある33)。正常歩行中には,回旋運動はほ とんど生じていないと報告があり,その回旋角度は 8°程度であるとされる21)。
A:大腿骨上の脛骨回旋 B:脛骨上の大腿骨の回旋 図 9 膝関節回旋(水平面)
15 2-2-2 膝関節の筋機能(Muscular function at the knee)
膝関節の屈曲-回旋筋群については,腓腹筋を除いて,膝関節後方をまたぐ筋群である。
それらの筋群は膝関節を屈曲させ,内旋または外旋させる作用をもつ。いわゆる,膝関節の 屈曲-回旋筋群にはハムストリングス,大腿筋膜張筋,縫工筋,薄筋,膝窩筋が含まれる。
大腿神経,閉鎖神経,坐骨神経によって支配されている。
ハムストリングス(半膜様筋,半腱様筋,大腿二頭筋長頭)(図 12)は,坐骨結節に近位 付着をもつ。大腿二頭筋短頭は大腿骨粗線の外側に近位付着がある。遠位では,3 つのハム ストリングス筋は膝関節を越えて脛骨と腓骨に付着する。半腱様筋(semimembranosusu)は,
遠位で脛骨内側顆後面に付着し,さらに,内側側副靭帯,内外側半月,斜膝窩靭帯,膝窩筋 にも付着する。半腱様筋(semitendinosusu)腱の大部分の走行は,半膜様筋のすぐ後方で ある。しかし,膝関節のすぐ近位で,半腱様筋は遠位付着の脛骨前内側面へ向けて前方に走 る。この半膜様筋および半腱様筋は,膝関節の屈曲,内旋作用をもつ。大腿二頭筋(biceps femoris)の長・短頭は腓側副靭帯のほかに腓骨頭に付着する。筋の作用は,膝関節の屈曲,
A:正常膝関節の水平面 B:膝関節を外側に回転させると.脛骨顆部は大腿骨顆部に対して外旋する
表 4 脛骨回旋角度に関する報告 図 10 膝関節水平軸
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
16 外旋作用である(図 11)。しかし,筋電図学的研究によると,膝関節屈曲を伴わない脛骨の 内外旋ではハムストリングスの一貫した筋活動を認めなかった35)。膝関節完全伸展位では,
膝関節は機械的にロックされ,ほとんどの靭帯が緊張することや,ハムストリングスの膝関 節内外旋モーメント・アームは減少が要因として挙げられる。
膝窩筋(popliteus)(図 12)の生理学的面積は,他の膝関節屈筋と比較しても非常に小 さい36)。そのため,膝関節屈曲トルクに与える影響はわずかである。一方,脛骨内旋を伴う 膝関節屈曲では著しい活動の増大が確認されており,膝窩筋は膝関節内旋で大きな筋活動 を示すことになる 37)。また,膝関節の動的安定性において重要な役割を担っている。検体 を用いた研究によれば,膝窩筋は後十字靭帯を補強する機能を有しており,脛骨の後方滑り や脛骨の内反および外旋も制御しているとされる。
縫工筋(sartorius)(図 12)は,腹臥位では膝関節を屈曲すると筋活動を伴うが,その活 動開始時期はハムストリングスなどの他筋と比較して遅い 38)。膝関節屈曲が 0-90°へと 増加するのに伴い,縫工筋の屈曲モーメント・アームが増加することは,力学的分析結果と も一致している 39)。立位において,膝関節軽度屈曲位で脛骨を内旋した際には,筋活動が 筋電図では確認できなかった38)。縫工筋の回旋モーメント・アームは膝関節屈曲による影
図 11 ハムストリングスにより膝関節回旋運動
内側ハムストリングスの単独収縮では膝関節屈曲を伴った内旋が生じる。外側ハムストリングスが単 独収縮すると、膝関節屈曲を伴った外旋が生じる。
17 響をほとんど受けない 39)。歩行においては,膝関節外旋への作用を明らかにした報告はな い。立脚期初期における中殿筋や小殿筋とともに,股関節外転筋として活動しているとの報 告である40)。
薄筋(gracilis)(図 12)は筋電図による研究は少ないが,膝関節の内旋と屈曲に関与 する点では見解が一致している35)41)。薄筋のモーメント・アームの分析においても,膝関 節の屈曲と脛骨内旋の役割が示されている39)42-43)。
大腿筋膜長筋(tensor fasciae latae)(図 12)筋電図学的研究によれば,股関節屈 曲,外転,外旋において活動する35)38)。その断面積は腸腰筋や中殿筋,小殿筋と比較して 小さいが,大きな股関節の外転モーメント・アームを有している。また,屈曲モーメン ト・アームは,腸腰筋よりも大きい44-45)。筋電図でみると,膝関節伸展時に大腿筋膜張筋 は活動を示すが,脛骨の内旋あるいは外旋による影響は受けない38)46)。脛骨外旋の補助を 行うが,膝内側の鵞足を構成する筋群のように,腸脛靭帯への付着を介して膝関節の動的 安定化を担っており,膝関節を内転させる外力が加わった際に活動が増加する47-49)。 これまでの研究では,非荷重下やご検体を用いての筋活動およびモーメント・アームの 分析がその多くを占めていた。したがって,荷重下における下腿回旋運動に対する作用に ついては不明確な点を含んでおり明確化する必要があった。よって,下腿回旋運動と主動 作筋における筋活動との関係性について,第 4 章の運動学的分析の中で検証を行った。
図 12 膝関節回旋に関与する筋群
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
18 2-2 方向転換に関する研究について
多くの対人型球技においては,プレイヤーはしばしばボールなどの標的の思いがけな い変化に対して可能な限り素早く自らの動きを変更しなければならない。例えば,相手 が急に方向を変えたり,フェイントをかけてきたり,受け取るべきパスをインターセプ トされた際には,できるだけ早期に自らの動きを修正することによって,チームへのダ メージを最小限に抑えることが可能となる。特に,敵味方が入り混じる競技においては 走行方向を急激に変更(方向転換)することが必要となる。この方向転換の必要性は,
スポーツ現場に限らない。余暇活動を含む日常生活をおくる上でも重要な動作の一つで ある。例えば,料理においては,手を洗うためにシンクに直面し,レシピに必要な生鮮 食品を冷蔵庫から取り出すために方向転換する。また,フライパンなど調理器具をキャ ビネットから取り出す際にも方向転換を行う。食材をカットするため,コンロに直面す るため,食器を取り出すためなど,料理のほんの 1 例ではあるが方向転換を必用としな い動作を考えることの方が難しい。この方向転換能力を含む評価指標として Timed Up and Go test50-52)は,我々理学療法士になじみ深い評価である。しかしながら,椅子から 立ち上がって 3m の直進歩行をし,180°の方向転換をした後,椅子に着座するまでの所 要時間を計測するパフォーマンステストとしては成立しているが,運動学・運動力学的 分析は十分ではない。同様に,明治生命厚生事業団が提示している歩行動作能力テスト(図 13)53)や 10ⅿジグザグ歩行時間54),3ⅿジグザグ歩行55)があるが,いずれもゴールするまで の所要時間を計測するものである。したがって,基準値との対比においては優れているが,
その動作における課題特異性について明らかにされていない。つまり,所要時間が,運動機 能における何の機能を反映しているかが不明確であることから,可能な限り具体的にバラ ンス能力を低下させている原因に介入することが難しいという問題がある。
一方で,方向転換を詳細に分析している研究も存在する。Andrews はクロスオーバース テップ,サイドステップを識別した(図 14)1)。同様に,Hase らはステップターン,ス ピンターンの 2 つタイプの step strategy を識別した56)。
図 13 歩行動作能力テスト (文献 53 より引用)
10.0 m の歩行路を設け.2.0 m 間隔で中心線から 0.5 m の位置に.左右 2 ヶ所ずつの方向転換点を設定す る。スタートの合図で.各方向転換点の外側をできるだけ速く歩き.ゴールするまでの所要時間を計測する。
計測は 2 回行い.成績は速い方の値を採用するパフォーマンステストである。
19 Courtine は方向転換の際の視覚と EMG を解析し,方向転換において頭部の変位に伴う 視覚の軌道が重要であることを示した57-58)。Patla は体重心のコントロールは足部の配 置と前額面における体幹の運動であることを明らかにした59)。一方,バイメカニカルな 研究では,Taylor が三次元動作解析装置を用いてステップターンおよびスピンターン を運動学・運動力学的に分析した。この研究では歩行に比し,関節可動範囲の増加が認 められたことを報告した 60)。また,Huxham はストライド長,ステップ幅,ストライド 幅61),Orendurff らは半径1m の円を歩いた際の各関節におけるメカニクスを報告した が,下腿回旋に関するデータは欠けていた(図 15)62)。
図 14 turn のパターン (文献 1 より引用)
High speed motion pictures を用いてランニングにおける turn のメカニズムを分析し.sidestep および crossover を定義した。sidestep(A・B)は.進行方向と反対側に足を付き.対側下肢により新しい方向へ first step をする動作と定義した。crossover(C・D)は.新しい方向へ同側下肢を付き.反対側をクロスして 新しい方向へ加速する動作と定義した。
A・B : sidestep C・D : crossover
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
20 荷重下での下腿回旋機能を含んだ運動学的分析も多くはないが報告されている。Zu¨
rcher らは,椅子から立ち上がってからのクロスオーバーターンおよびサイドステップター ンにおける下腿回旋角度を中心に分析した(図 16)63)。類似課題として,Desloovere らは 直進歩行からのクロスオーバーターンおよびサイドステップターンにおける下腿回旋角度 を含む各関節角度変化を報告した(図 17)64)。これまでの研究から方向転換におけるクロ スオーバーターンやサイドステップにおいては,約 20°前後の下腿回旋角度を要する課題 であることが明らかとなっているが,運動力学的な分析は我々の知る限りない。したがって,
下腿回旋運動の制御メカニズムについては不明確である。
いずれの分析においても,三次元動作解析装置や床反力計など高価な機器を使用した研 究である。機器を使用できる環境が整っていることや時間的余裕がある場合には効果的で あるが,臨床場面においては上記の条件を満たす施設は数少ない印象である。裏を返せば,
未整備な環境において,いかに客観的なデータを得るのかが,臨床における大きな課題の一 つでもある。この課題を解決するには臨床で簡便に使用可能な評価の開発が大きな意味を もつ。ただし,評価の開発にあたっては運動学および運動力学的に統制された指標が必要と なることを考慮すると,方向転換を用いた評価の開発にあたっては,大きく 3 つの問題があ ると考えている。被験者間で下腿回旋角度変化に影響を及ぼす「ステップ幅」「軸足の向き」
「軸足の heel off のタイミング」の動作における統制が難しいという点である。したがっ て,第 6 章では,3 つの問題点を基に臨床で簡便に使用可能な方向転換を用いた荷重下での 下腿回旋機能評価の開発を進めた。
図 15 半径 1m の円歩行 (文献 62 より引用)
三次元動作解析装置を用いて半径1m の円を歩いた際の inside foot および outside foot におけるメカニク スを直線歩行と比較した。方向転換に着目しているが.水平面における動作に関する分析は行われてい ない。
21 図 16 椅子から立ち上がってクロスオーバーターンおよびサイドステップターン (文献 63 より引用)
CT : クロスオーバーターン ST : サイドステップターン
三次元動作解析装置を用いて.椅子から立ち上がり 60°の方向へ CT および ST した際の下腿回旋角度 を中心に分析した。pvot foot では.約 20°前後の下腿回旋角度範囲を認めた。
図 17 直進歩行からクロスオーバーターンおよびサイドステップターン (文献 64 より引用)
CT : クロスオーバーターン ST : サイドステップターン
三次元動作解析装置を用いて.直進歩行から立ち上がり 90°の方向へ CT および ST した際の下腿回旋 角度を中心に分析した。pvot foot では.約 20°前後の下腿回旋角度範囲を認めた。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
22
第3章 下腿回旋機能評価指標の開発
- sine wave tandem gait テスト
に関する運動学的分析 -
23 第3章 下腿回旋機能評価の開発
- sine wave tandem gait テストに関する運動学的分析-
3-1 目的
荷重下での下腿回旋運動は円滑な方向転換に重要と思われる。この方向転換に関する評 価方法は確立されたものはないが,明治生命厚生事業団が提示している歩行動作能力テス ト53)が用いられていることが多い。この歩行能力テストは,10.0 m の歩行路を設け,2.0 m 間隔で中心線から 0.5 m の位置に,左右 2 ヶ所ずつの方向転換点を設定する。スタートの 合図で,各方向転換点の外側をできるだけ速く歩き,ゴールするまでの所要時間を計測する。
計測は 2 回行い,成績は速い方の値を採用するパフォーマンステストである。よって,基準 値との対比においては優れており高齢者の生活体力評価としての検討 54-55)や筋機能 65-67)の 関連性を示した報告がなされている。しかしながら,方向転換時の下腿回旋運動に関する運 動学および運動力学的特異性については検討されていないのが現状である。
一方,理学療法分野において難易度の高いバランス課題である片脚膝立ち位保持課題に おいて,能動的な下腿回旋運動による COP 制御が行われていることが明らかとなり12),そ の周波数は 2 Hz という高い成分を含んでいることが示された13)。したがって,片脚膝立ち 位保持課題によって非荷重下での下腿回旋機能の評価や,改善を目的とした運動療法に応 用できる可能性が示唆された。
その意味で,片脚膝立ち位の保持能力と歩行時の方向転換遂行能力の関連性を検討する ことは理学療法においても重要であると考えている。その一方で,歩行時の方向転換におい て下腿回旋運動がどの程度行われているのかをまずは明らかにする必要がある。しかしな がら,先行研究における方向転換の解析方法では,ステップ幅等に対する規定が十分ではな く,下腿回旋運動の定量的な測定には問題があった68-69)。そこで我々は sine wave 歩行路 におけるタンデム歩行に着目した。
以上の論点から,本研究の目的は,sine wave 歩行路をタンデム歩行した際の,荷重下で の下腿回旋運動を含めた水平面上の運動学的特徴を明らかにすることとした。
3-2 対象
健常成人 18 名(年齢 21.9 ± 2.7 歳,身長 167.7 ± 6.8 cm,体重 61.6 ± 8.7 kg, BMI 21.9 ± 2.1 kg/m2)とした。軸足についてはボールを蹴る足の反対側と定義し,全対象者 が左脚であった。なお,歩行を制限する中枢神経疾患,整形外科疾患,視覚障害や前庭機能 障害等のバランス機能に影響を及ぼす障害とその既往が無いことを事前に確認した。
さらに,軟部組織によるアーチファクトを考慮し,基本的には BMI の判定基準が正常である 被験者を取り込んだ。
3-3 説明と同意
対象者には研究内容を十分に説明したのち,署名を持って承諾を得た。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
24 3-4 方法
1) Sine wave 歩行路の作成
運動課題は sine wave 歩行路におけるタンデム歩行である。1 周期、3 周期の sine wave 歩行路を作成し,タンデム歩行した際の下腿回旋運動を中心に video data を確認し た。図 18 は video data を切り出した画像である。図 18A の1周期の歩行路では歩行が直 線的であり,方向転換に伴う下腿回旋運動を観察することは困難であった。一方,B の 3 周期の歩行路においては方向転換の際に下腿回旋運動が観察された。よって,3 周期の sine wave 歩行路を採用した。さらに,健常成人においては,方向路の幅によって歩行速 度やエラー数(歩行路から足を踏みはずす,タンデム歩行が困難)に顕著な差が生じない ことから,臨床現場での汎用性等を考慮して市販されているテープ幅である 0.36m を採用 した。Sine wave 歩行路は防炎クロス(LFM-FRH/36/184,Canon 社製)に大型プリンター
(iPF8300s,Canon 社製)で印刷した。
図 18 異なる sine wave 歩行路およびタンデム歩行
A : 1 周期の sine wave 歩行路におけるタンデム歩行 B : 3 周期の sine wave 歩行路におけるタンデム歩行
25 2) Sine wave 歩行路
歩行路は,長さ 2.0 m,振幅 0.25 m,3 周期の sine wave を採用した。また,歩行路を示す ライン幅は 0.36 m とした(図 19)。
3) 使用機器
使用機器は三次元動作解析装置(ローカス 3D MA-5000,ANIMA 社製)カメラ 6 台を用い た。なお,サンプリング周波数は 150 Hz とした。マーカー貼付位置については,頭頂,C7 棘突起,胸骨柄,両肩峰,両上前腸骨棘,左外側上顆 2 箇所,右外側上顆,左外果 2 箇所,
右内果の計 13 箇所とした(図 20)。図 21 の拡大図に示す左外側上顆 2 箇所(以下,大腿骨 2 点マーカー),左外果 2 箇所(以下,脛骨 2 点マーカー)のマーカー位置は本来の骨指標 とは異なっている。この貼付位置を選択した要因として,sine wave 歩行路上のタンデム歩 行では,本来マーカーを貼付するべき大腿骨内側上顆および内果におけるマーカートラッ キングが非常に難しいという背景がある。加えて,3 次元動作解析装置のカメラ台数が 6 台 であったことも 1 要因と考えている。したがって,課題動作による影響を考慮し,内側上顆 および内果のマーカーを外側へ平行移動した。大腿骨および脛骨の 2 点マーカーは,それぞ れの骨指標から 1.5cm,10.0cm の位置で統一した。この外側への平行移動した 2 点マーカ ーにより下腿回旋角度を算出することから,以下の点を配慮した。足角 0°での直立位にお いて大腿骨および脛骨 2 点マーカーを貼付することを基本とし,大腿骨 2 点マーカーにつ いては,膝関節屈曲に伴う腸脛靭帯によるアーチファクトの影響を可能な限り排除するた め,靭帯やや後方を貼付位置とした。2 点マーカー貼付後,膝関節屈曲に伴う腸脛靭帯の影 響が最小限であることを再度確認した(図 21)。
図 19 Sine wave 歩行路およびタンデム歩行
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
26 図 20 マーカー貼付位置
右図 : 大腿骨および脛骨 2 点マーカーを示す。2 点マーカーの貼付は.足角 0°の直立位とし.2 つのマーカーはそれ ぞれ骨指標から 1.5cm.1.0cm の距離で統一した。
図 21 膝関節屈曲に伴う大腿骨外側上顆と腸脛靭帯の位置関係
A : 膝関節伸展位における大腿骨外側上顆と腸脛靭帯の位置 B B’ : 膝関節屈曲位における大腿骨外側上顆と 腸脛靭帯の位置(B’の破線は腸脛靭帯を示す) 膝関節屈曲に伴い腸脛靭帯の位置は大腿骨外側上顆のやや前方に 位置する
27 4) 被験者に対する課題の説明
「体の前で腕をクロスし,つま先と踵が必ず接するように歩行路を歩いてください。また,
脚が歩往路からはみ出ないようにしてください。」とした。
5) 測定
開始肢位は,スタートライン上に前胸部で腕を組んだ立位とした。音合図の後,タンデム 歩行を開始し,両足部がゴールラインを超えた時点を終了とした。課題遂行にあたっては 3 つの中止基準を設け,胸部の腕組みが外れた場合,歩行路上から足部が外れた場合,両脚支 持期において一側踵部と他側足尖が未接地の場合とした。いずれかに該当した際には,再測 定を行った。
6) データ解析
課題は 3 周期の sine wave 歩行路におけるタンデム歩行であるが,直進歩行と同様に基 本的には定型性のある動作であると仮定し,解析局面は 1 周期のデータとした。頭頂マーカ ーの座標と解析局面における座標データが一致した区間の座標データを切り出し,体幹回 旋角度,大腿回旋角度(大腿回旋運動:骨盤に対する大腿の回旋=股関節回旋),下腿回旋 角度を求めた。回旋角度は,オイラー角では関節屈曲位において角度が何を表しているのか を理解することが難しため,極座標系を用いた投影角を採用した。回旋角度の算出方法は以 下に示すとおりである。体幹回旋角度は C7 棘突起と胸骨柄を結んだ線の垂線と両 ASIS を 結んだ線とのなす角,股関節回旋角度は両 ASIS を結んだ線と左大腿骨外側上顆の 2 つのマ ーカーを結んだ線とのなす角,下腿回旋角度は左大腿骨外側上顆の 2 つのマーカーを結ん だ線と左外果の 2 つのマーカーを結んだ線とのなす角とした。なお,下腿回旋角度は,足角 0°の直立位で大腿および下腿中間位を 0 °と定義した。なお,データ処理については,
MATLAB®(Math Works 社製)によるオリジナルプログラムを用いた。
3-5 結果
体節角度について,外旋方向への角度変化と内旋方向への角度変化,角度範囲を表 5 に示 した。体幹回旋角度範囲は 23.3,大腿回旋角度範囲は 53.3,下腿回旋角度範囲は 47.3 で あった。図 22 は代表例の各体節角度の関係性示したものである。被験者間で足長に違があ り各々の角度における経時的な変動は異なっているが,全被験者において共通した関係性 が確認できた。基本的に体幹は進行方向へ回旋していた。左下肢を軸足とした左への方向転 換動作において,大腿は内旋位の際には,下腿は外旋位の構えをとった。反対に,左下肢を 軸足とした右への方向転換動作において,大腿は外旋位の際には,下腿は内旋位の構えを示 した。また,大腿回旋角度および下腿回旋角度は複数のピークを示した。
下腿回旋機能評価としての正弦波状タンデム歩行テストの開発
Development of sine wave tandem gait test for functional evalution of tibial rotation
28 表 5 各体節角度
図 22 Sine wave tandem gait テストにおける各体節角度の時系列変化(参考例)
Trunk rotation : angle change to right rotation (+) angle change to left rotation (-)
Thigh の回旋角度変化に対し.tibial の回旋角度変化は逆方向の変化を示した(例えば,thigh が内旋方向へ角 度変化した際には.tibial は外旋方向へ角度が変化している)。
Trunk rotation および thigh rotation の range は.日本リハビリテーション医学会の示す range に対し.狭い範囲 での運動であった。一方.tibial rotation における range は示されていないが.過去の報告(表 4)と大よそ一致 した値を認めた。