卒業論文 2002 年度 ( 平成 14 年度 )
アプリケーションの動的再構成を実現する 基盤ソフトウェアの研究
指導教員
慶應義塾大学環境情報学部
徳田 英幸 村井 純 楠本 博之
中村 修 南政樹
慶應義塾大学 環境情報学部
氏名:高橋 元
卒業論文要旨 2002 年度 ( 平成 14 年度 ) アプリケーションの動的再構成を実現する
基盤ソフトウェアの研究
論文要旨
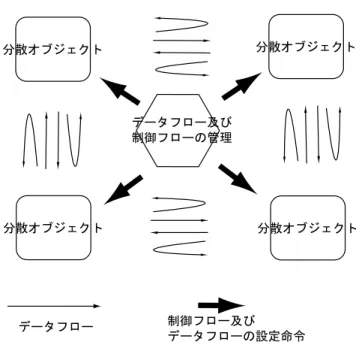
現在,ネットワーク接続性を持つ家電器機 (情報家電) の協調動作が可能となった.ま た,センサネットワーク等により家屋内の様々なものの状態及び位置情報が取得可能 になったことで,分散オブジェクト間のより多様な協調動作が可能となった.本論文 では,このような計算環境をインタラクティブスペースと呼ぶ.インタラクティブス ペースでは、情報家電や PC で稼動するアプリケーションなど様々な分散オブジェクト 間の協調が可能である.分散オブジェクトの協調動作を実現するアプリケーションを 記述する場合,分散オブジェクト間の協調動作 (以下振る舞いと呼ぶ) が静的に定義さ れてしまう.そのため,新規デバイスの参加などユーザが置かれる状況の変更に伴う 振る舞いの変更要求に柔軟に対処できない.本論文では,この問題に対処するために 2 つの側面からアプローチする.1 つ目には,分散オブジェクトの機能定義と分散オブ ジェクト間の協調動作を定義を分離する.協調動作定義を再定義することで,協調動 作を実行時に再定義可能なユーザの要求に適応的な環境を実現する.2 つ目には,イン タラクティブスペースで生活するユーザ自身が協調動作を再定義するエンドユーザプ ログラミング環境を想定し,協調動作定義をよりユーザの認知対象に近い記述モデル で実現する.
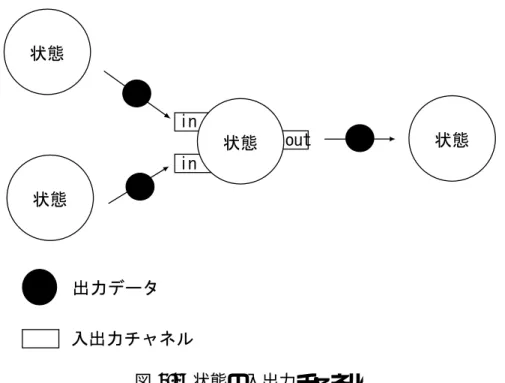
本研究では,この 2 つの問題に対処するために,分散オブジェクトにより構成される環 境をユーザの直接認知可能な離散状態の集合して表現した.また,分散オブジェクト間 の協調動作を離散状態の遷移規則として表現する言語 Interactive Space Programming Language(ISPL) を提案し,Java RMI を利用して ISPL のエバリュエータとパーサの 実装及び評価を行った.
キーワード: