RZ/A2Mグループ
RZ/A2M Software Package for GR-MANGO クイックスタートガイド
1. 要旨
本書は、RZ/A2M を搭載した株式会社コア製の GR-MANGO ボードと e2 studio 環境で動作する RZ/A2M Software Package for GR-MANGO のクイックスタートガイドになります。本書では、このパッケージに含 まれる各サンプルプロジェクトを実行する手順について記載しています。
2.1
ツール
RZ/A2M Software Package for GR-MANGO は、以下の環境で動作致します。ご確認ください。 ツール:
- IDE: e2 studio 7.8.0 or later
- Tool Chain: GNU ARM Embedded Toolchain 6-2017-q2-update IDE は以下のサイトから入手可能です。
https://www.renesas.com/products/software-tools/tools/ide/e2studio.html
Tool Chain は IDE に同梱されています。個別では以下のサイトから入手可能です。
https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-r m/downloads/6-2017-q2-update
e2 studio のインストール方法は以下文書を参照ください。
e2 studio Integrated Development Environment User's Manual: Getting Started
ターゲットボード: GR-MANGO
ICE (In-circuit emulater):
GR-MANGO は ARM Mbed DAPLink をサポートしており、ICE を使用せず、プログラムのダウンロード、 デバッグが可能です。DAPLink は以下の機能をサポートしています。
drag-and-drop programming (MSC) a virtual serial port (CDC)
CMSIS-DAP based debugging (HID)
DAPLink の詳細は以下のページを参照ください。 https://os.mbed.com/handbook/DAPLink ブートローダー: 本パッケージには、ブートローダーがテーブルデータとして実装されています。ソースコードを入手した い場合、以下より入手ください。 https://www.mxic.com.tw/en-us/support/technical-documentation/Pages/Serial-NOR-Flash.aspx
2.2
USB シリアルポート接続
GR-MANGO の CN1 は、シリアルポート接続を提供します。最初に接続した時、適切なドライバを PC が 自動的に見つけてインストールします。 シリアルポートに割り当てられた COM ポート番号は、Windows™ デバイスマネージャーで確認することが可能です。2.3
シリアルターミナル
シリアルターミナルソフト(PuTTY、HyperTerminal、Tera Term など)の設定を以下に記載します。 ボーレート: 115200 データビット: 8 パリティ: 無し ストップビット: 1 フロー制御: 無し COM ポート: Windows™ デバイスマネージャー参照3. サンプルプロジェクトの立ち上げ
3.1
開発環境へのインポート
本パッケージは、アーカイブファイルで提供しておりビルドする環境を e2 studio にインポートすることが 可能です。本章の手順に従うことで、ユーザが各サンプルプロジェクトのビルド環境をインポートすること が可能です。 パッケージを入手します。 パッケージを展開します。 使用するプロジェクトの zip ファイルを短いパスのフォルダに展開します。 スタートメニューから e2 studio を起動します。 各サンプルプロジェクトのサブディレクトリの上にあるトップディレクトリをワークスペースディレ クトリに設定します(図 3-1)。 図 3-1 e2 studio の起動 各サンプルフォルダ の上のトップディレ クトリを選択。 e2 studio の Welcome to e2 studio 画面で "ワークベンチ" をクリックします(図 3-2)。 図 3-2 ワークベンチの切り替え プロジェクトエクスプローラーウィンドウで右クリックし "インポート" を選択します(図 3-3)。 図 3-3 インポートの選択 このスペースで右ク リックしてください。
インポートダイアログで "一般" → "既存のプロジェクトワークスペースへ" を選択し、"次へ" のボタ ンをクリックします(図 3-4)。 図 3-4 インポートダイアログ "ルートディレクトリの選択" の右にある "参照" ボタンを選択すると、"フォルダ参照" ダイアログが 表示されます。そのまま "OK" ボタンを押してください(図 3-5)。 図 3-5 ルートディレクトに選択
ターゲットプロジェクトがチェックされていることを確認し "終了" ボタンをクリックします(図 3-6)。 (注:次の図のプロジェクトは参考になります。実際にご使用になりたいターゲットプロジェクト名を 選択してください。) 図 3-6 ターゲットプロジェクトのインポート ターゲットプロジェクトのインポートが完了すると、プロジェクトエクスプローラーウィンドウで確 認することができます(図 3-7)。 図 3-7 プロジェクトエクスプローラーウィンドウでの確認
3.2
プロジェクトのビルドと評価ボードへのダウンロード
ターゲットプロジェクトを選択しビルドボタン(トンカチアイコン)の横にある矢印をクリックし、ド ロップダウンメニューから"HardwareDebug"を選択しするとビルドが開始されます(図 3-8)。次回から は、ビルドボタン(トンカチアイコン)でビルドが可能になります。 図 3-8 ターゲットプロジェクトのビルド ビルドが開始されコンソールウィンドウでそのステータスを確認することができます(図 3-9)。 (注:ワークスペースフォルダまでのパスの長さに注意してください。パスが長すぎるとビルドエラーに なる場合があります。) 図 3-9 ビルドステータスの確認 ビルドが完了したら、対象プロジェクトの"HardwareDebug"ディレクトリ内にバイナリファイルが生 成されます。GR-MANGO の CN1 と PC を USB ケーブルで接続すると、PC は GR-MANGO を MBED ドライブとして認識します。生成したバイナリファイルを MBED ドライブへドラッグ&ドロップする ことで、プログラムをダウンロードできます。
ダウンロード後、GR-MANGO 上の Reset ボタンを押下し、プログラムを実行します。
3.3
CMSIS-DAP によるデバッグ
GR-MANGO は ARM Mbed DAPLink をサポートしており、OpenOCD によるデバッグが可能です。 GR-MANGO での OpenOCD デバッグ方法は、以下を参照してください。
本章では、本パッケージ同梱のプロジェクトに対して、ドライバ、ミドルウェアを追加する方法を記載し ます。
RZ/A2M Software Package for GR-MANGO では、ドライバ、ミドルウェアをコンポーネントとして管理し ており、e2 studio 上からコンポーネントを追加することができます。
各ドライバ、ミドルウェアの使用例は、RZ/A2M Simple Applications Package for GR-MANGO(R01AN5595) の各サンプルプロジェクトをご参照ください。
各ドライバ、ミドルウェアを e2 studio にインストールする方法など、スマート・コンフィギュレータの使 用法は、RZ/A2M スマート・コンフィグレータ ユーザーガイド: e² studio編(R20AN0583)を参照ください。
4.1 コンポーネントとサンプルプロジェクトの関連
各サンプルプロジェクトで使用されているコンポーネントを以下の表に示します。 Package Component (説明) Sample Program (名称) r_c bu ffer r_dm ac r_dr p r_ o c ta b us r_m ipi r_os tm r_riic r_r v ap i r_ s ci fa r_ s d hi _s im p lif ied r_s si f r_us b h0_ hi d c r_us b h0_ bas ic r_us b 1_h idc r_us b 1_ ba s ic r_ v dc fatfs (リングバッ ファ ) (DM A C ド ライバ ) (DRP ドライ バ ) (Oc ta b us ド ライバ ) (M IPI ド ライバ ) (O S タイ マドラ イバ ) (R II C ドラ イバ ) (V ideo ユー ティリ ティ ) (S CI F a ドライバ ) (S DHI ド ライバ ) (SSI F ド ライバ ) (US B H c h 0 HI D ドラ イバ ) (US B H c h 0 基本ド ライバ ) (US B H c h 1 HI D ドラ イバ ) (US B H c h 1 基本ド ライバ ) (V DC6 ドライ バ ) (F a tFS ファ イルシ ステム ) simple applications blinky_freertos*1 ✔ - - - - ✔ - - ✔ - - - - blinky_osless*2 ✔ - - - - ✔ - - ✔ - - - - cam_and_disp*3 ✔ - - - ✔ ✔ ✔ ✔ ✔ - - - ✔ - drp_basic*3 ✔ - ✔ - ✔ ✔ ✔ ✔ ✔ - - - ✔ - drp_dynamic1*3 ✔ - ✔ - ✔ ✔ ✔ ✔ ✔ - - - ✔ - drp_dynamic2*3 ✔ - ✔ - ✔ ✔ ✔ ✔ ✔ - - - ✔ - drp_dynamic3*3 ✔ - ✔ ✔ ✔ ✔ ✔ ✔ ✔ - - - ✔ - drp_parallel*3 ✔ - ✔ - ✔ ✔ ✔ ✔ ✔ - - - ✔ - drp_simple_isp_sample1*3 ✔ - ✔ - ✔ ✔ ✔ ✔ ✔ - - - ✔ - sdhi_fat*3 ✔ - - - - ✔ - - ✔ ✔ - - - ✔ ssif*3 ✔ ✔ - - - ✔ ✔ - ✔ - ✔ - - - - usbh_hid*3 ✔ - - - - ✔ ✔ - ✔ - - ✔ ✔ ✔ ✔ - - 【注】 ✔ :コンポーネントが使用されている - :コンポーネントは使用されていない*1 :e2 studio 上に表示されるプロジェクト名は「rza2m_blinky_sample_freertos_gcc」 *2 :e2 studio 上に表示されるプロジェクト名は「rza2m_blinky_sample_osless_gcc」
4.2
コンポーネントの追加方法
e2 studio のプロジェクトエクスプローラーウィンドウで、対象プロジェクトのプロジェクトツリーを 開き、その中にある.scfg ファイルをダブルクリックします。 コンポーネントタブに移動し、コンポーネントの追加ボタンから、対象のコンポーネントを追加しま す。 対象のコンポーネントを追加後、コードの生成ボタンをクリックします。 以上で、対象プロジェクトの generate¥sc_drivers と .settings¥smartconfigurator にコンポーネントが追加 されます(図 4-1)。コンポーネント追加後は、3.2章に示す手順に従い、ビルドを行ってください。 図 4-1 コンポーネントの追加方法4.3 各コンポーネントの実装方法
各コンポーネントのプロジェクトへの実装は以下の手順で行います。 4.2章の方法でコンポーネントの追加 Smart Configurator によるコンポーネントの設定 コンポーネントのコード生成 コンポーネントのドキュメントで API 関数名や API 記載ファイル名を確認 4.1章からコンポーネント使用プロジェクトを確認し、使用箇所を API 関数名や API 記載ファイル名で 検索 検索した使用箇所を参考にプロジェクトに実装する5. FreeRTOS デバッグ機能
この章では e2 studio の FreeRTOS デバッグ機能について説明します。 この機能により、生成されたタスク、キュー、タイマの一覧と状態をプログラム停止中に確認することが できます。5.1 FreeRTOS デバッグ機能の追加
5.1.1 e
2studio を新規インストールまたは更新する場合
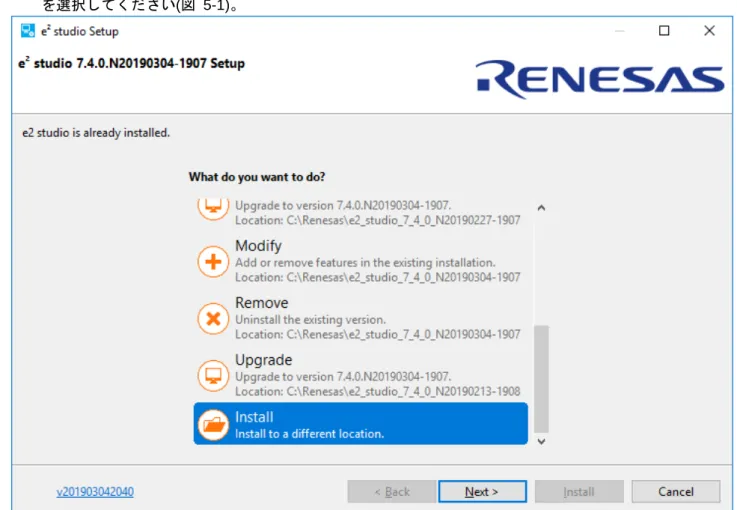
e2 studio のインストーラを起動します。e2 studio がインストール済みの場合、Upgrade または Install を選択してください(図 5-1)。
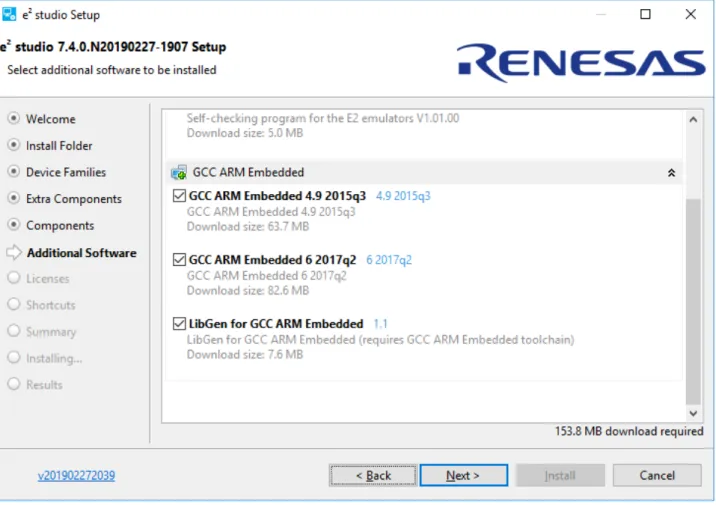
Embedded」にチェックを入れます(図 5-4)。
以上の設定により、FreeRTOS デバッグ機能が使用可能となります。
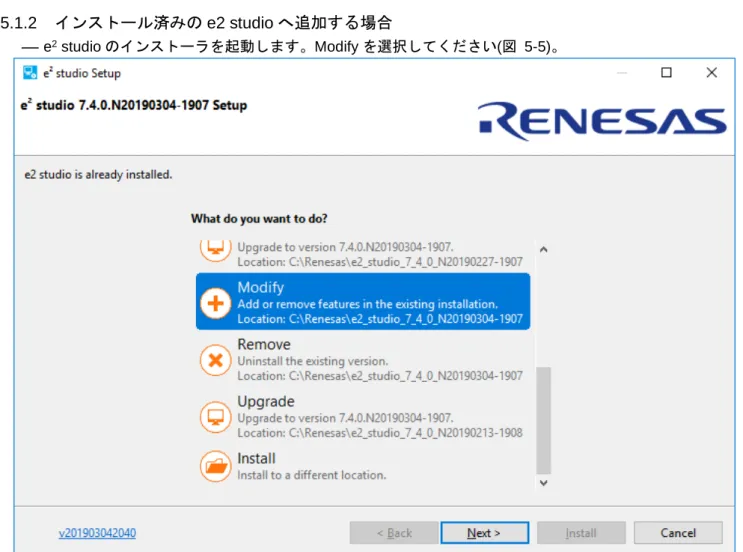
5.1.2 インストール済みの e2 studio へ追加する場合
e2 studio のインストーラを起動します。Modify を選択してください(図 5-5)。
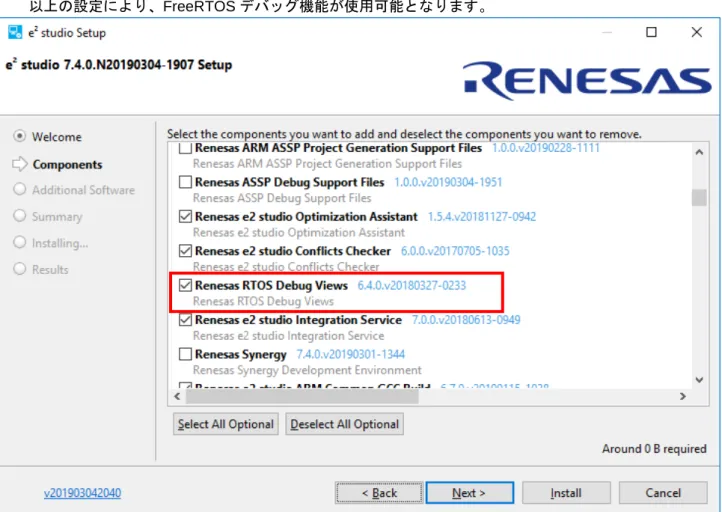
Components を選択するときに選択画面で「Renesas RTOS Debug Views」にチェックを入れます(図 5-6)。
以上の設定により、FreeRTOS デバッグ機能が使用可能となります。
5.2 使用方法
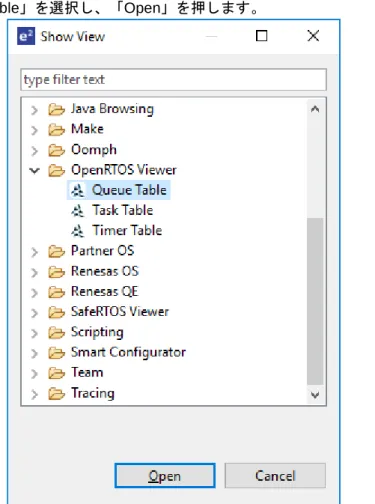
1 FreeRTOS を使用するプログラムをボードにダウンロードします。 2 ダウンロードしたプログラムを実行します。 3 プログラムを一時停止します。 4 「Window」メニューの「Show view」を選択し、「Other」を選択します(図 5-7)。 図 5-7 FreeRTOS デバッグの使用方法 46 同様の手順で「Task Table」を選択し、「Open」を押します。 7 同様の手順で「Timer Table」を選択し、「Open」を押します。
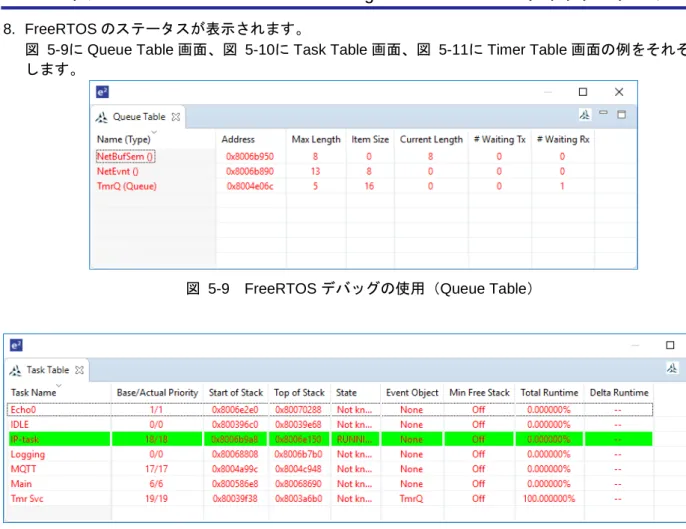
図 5-9に Queue Table 画面、図 5-10に Task Table 画面、図 5-11に Timer Table 画面の例をそれぞれ示 します。
図 5-9 FreeRTOS デバッグの使用(Queue Table)
図 5-10 FreeRTOS デバッグの使用(Task Table)
改訂記録
Rev. 発行日
改訂内容
ページ ポイント
ここでは、マイコン製品全体に適用する「使用上の注意事項」について説明します。個別の使用上の注意事項については、本ドキュメントおよびテク ニカルアップデートを参照してください。 1. 静電気対策 CMOS 製品の取り扱いの際は静電気防止を心がけてください。CMOS 製品は強い静電気によってゲート絶縁破壊を生じることがあります。運搬や保 存の際には、当社が出荷梱包に使用している導電性のトレーやマガジンケース、導電性の緩衝材、金属ケースなどを利用し、組み立て工程にはアース を施してください。プラスチック板上に放置したり、端子を触ったりしないでください。また、CMOS 製品を実装したボードについても同様の扱い をしてください。 2. 電源投入時の処置 電源投入時は、製品の状態は不定です。電源投入時には、LSI の内部回路の状態は不確定であり、レジスタの設定や各端子の状態は不定です。外部リ セット端子でリセットする製品の場合、電源投入からリセットが有効になるまでの期間、端子の状態は保証できません。同様に、内蔵パワーオンリセッ ト機能を使用してリセットする製品の場合、電源投入からリセットのかかる一定電圧に達するまでの期間、端子の状態は保証できません。 3. 電源オフ時における入力信号 当該製品の電源がオフ状態のときに、入力信号や入出力プルアップ電源を入れないでください。入力信号や入出力プルアップ電源からの電流注入によ り、誤動作を引き起こしたり、異常電流が流れ内部素子を劣化させたりする場合があります。資料中に「電源オフ時における入力信号」についての記 載のある製品は、その内容を守ってください。 4. 未使用端子の処理 未使用端子は、「未使用端子の処理」に従って処理してください。CMOS 製品の入力端子のインピーダンスは、一般に、ハイインピーダンスとなっ ています。未使用端子を開放状態で動作させると、誘導現象により、LSI 周辺のノイズが印加され、LSI 内部で貫通電流が流れたり、入力信号と認識 されて誤動作を起こす恐れがあります。 5. クロックについて リセット時は、クロックが安定した後、リセットを解除してください。プログラム実行中のクロック切り替え時は、切り替え先クロックが安定した後 に切り替えてください。リセット時、外部発振子(または外部発振回路)を用いたクロックで動作を開始するシステムでは、クロックが十分安定した 後、リセットを解除してください。また、プログラムの途中で外部発振子(または外部発振回路)を用いたクロックに切り替える場合は、切り替え先 のクロックが十分安定してから切り替えてください。 6. 入力端子の印加波形 入力ノイズや反射波による波形歪みは誤動作の原因になりますので注意してください。CMOS 製品の入力がノイズなどに起因して、VIL(Max.)から
VIH(Min.)までの領域にとどまるような場合は、誤動作を引き起こす恐れがあります。入力レベルが固定の場合はもちろん、VIL(Max.)から VIH(Min.)
までの領域を通過する遷移期間中にチャタリングノイズなどが入らないように使用してください。 7. リザーブアドレス(予約領域)のアクセス禁止 リザーブアドレス(予約領域)のアクセスを禁止します。アドレス領域には、将来の拡張機能用に割り付けられている リザーブアドレス(予約領域) があります。これらのアドレスをアクセスしたときの動作については、保証できませんので、アクセスしないようにしてください。 8. 製品間の相違について 型名の異なる製品に変更する場合は、製品型名ごとにシステム評価試験を実施してください。同じグループのマイコンでも型名が違うと、フラッシュ メモリ、レイアウトパターンの相違などにより、電気的特性の範囲で、特性値、動作マージン、ノイズ耐量、ノイズ幅射量などが異なる場合がありま す。型名が違う製品に変更する場合は、個々の製品ごとにシステム評価試験を実施してください。