修士論文要旨
(2015年度)
アナログ回路技術による太陽電池応用、
出力電力最大化システムの最適化研究
A Study of Optimizing a Solar-cell Power System that Maximizes the Output Power by Applying Analog Circuit Techniques
電気電子情報通信工学専攻 安倍 幹織 Mikio Abe 1 はじめに
㐿⊒ᤨ㑆 㔚ജ㊂
㔚ജᶖ⾌
㔚ᳰኈ㊂
⊒㔚
శࠍㅘㆊ 㔚ᳰߛߌߢߪ
ޓ⾔߃ߥ
ࡕࡃࠗ࡞ᯏེߩᕆㅦߥ㜞ᯏ⢻ൻ ᄥ㓁㔚ᳰࡄࡀ࡞ߩᄙ᭽ൻЈ↪ㅜߩᄢ
ޟ⊒㔚ߔࠆࠟࠬޠ ޟᦛ߇ࠆᄥ㓁㔚ᳰޠ
ࠪࠬ࡞ဳ ࡈࠠࠪࡉ࡞ဳ
図
1:研究背景
近年、携帯型電子機器の高機能化に伴い消費電力も増 大しているが、この電源となる二次電池の容量は消費電 力に追従できていない。
そこで家庭用電源からの充電を必要としない太陽電 池が注目されている。様々な環境で発電できる太陽電池 を利用することで電力増加の追従に寄与できる。また、
太陽電池セルの多様化もこれに後押ししている。
ただし、どんな太陽電池も環境に依存して発電量 が 変 わ る た め 、常 に 最 大 電 力 で 発 電 で き る よ う に
MPPT(Maximum Power Point Tracking)制御という 手法が用いられている。しかし携帯型太陽電池の
MPPT制御システムにはシステム規模・消費電力・動作電圧と いった課題がある。本論分ではアナログ回路を用いて、
携帯電子機器への利用を目的とした
MPPT制御システ ムの最適化を提案する。
2 従来手法:デジタル回路 MPPT システム
従来の
MPPTアルゴリズムを説明する。第一に固 定電圧制御
CVT(Constant Voltage Tracking)である。
CVT
は、太陽電池の出力電圧が常に開放電圧の
75%付 近になるように帰還をかけることで、MPP 近傍で動作 させて発電効率を上げる。CVT の利点はアルゴリズム の簡易性と応答性の速さだ。一方で環境に依存して変わ る
MPPに追従できない。
第二に山登り法
HC(Hill Climbing method)である。
HC
は
MPPTのアルゴリズムの中で最も一般的である。
HC
は
CVTと同じく帰還による制御方式であり、前状 態と現状態の電力を比較し頂点を目指す。
HC
の利点は
MPPへの収束性に優れていることだ。
また、検出情報が太陽電池の出力電圧と出力電流のみで あり比較的に簡易に実現できる。
欠点は、常に制御がかかるため
MPPで完全に動作が 落ち着かないことである。また
CVTと比べると収束精 度は良いが、応答速度は遅い。
Solar-Cell DC-DC
Converter Iout Vout
Power Comparator
Load
Sample &
Hold
PWM Controller
図
2: MPPTシステム:従来構成
図
2は従来のデジタル回路構成による山登り法
MPPTシステムの例である。
従来構成では
MPPTの制御をデジタル信号処理で行 うため変換器が必要である。また、マイコンなどの汎用 ボードで制御する方式もあるが、いずれにしてもアナロ グとデジタルの混載によりシステムの規模やコストが 増大する。また、一般的なマイコンは動作電圧が
3V〜5V
ほど必要であり低電圧での動作が難しい。加えて、
システムが大規模になることにより消費電力の増大も 懸念される。
1
3 提案手法:アナログ回路 MPPT システム
本論分ではアナログ回路技術によりデジタル信号処理 を行わない方式を提案する。特に
MPPT制御部分にお いて、電力情報を出力する乗算器と
Dutyの制御量を決 定する
Up/Downカウンタをアナログ回路で構成する。
アナログ回路構成により以下の利点があげられる。
•
変換器、マイコンなどが不要になり、回路面積の縮 小、消費電力の低下、プログラム構築などのコス ト削減。
•
ビット精度が無いため単純な構成・少ない素子数で 演算機能を実現できる。
•
素子数の減少により低電圧で動作可能になる。
また、前節で一般的な
MPPTアルゴリズムを比較し たが、どちらの方式も欠点がある。そこで、
CVTと
HCを適応的に組み合わせるアルゴリズムを提案する。
ജ㔚Vout
ജ㔚ജPout
Ish1 Ish2 Ish3
Vrefh Vrefl
図
3: Active Hill Climbing通常、HC では電力値を帰還し探索するが
MPPから 遠い動作点からでは効率が悪い。そこで、MPP 遠方で は
CVTを行って太陽電池の動作点を
MPP近傍に移し、
そこから
HCに切り替える手法を提案する。このアルゴ リズムを、全動作領域で
HCを適用するのではなく、能 動的に動作点を
MPP近傍に規定することから、 「Active
Hill Climbing method(AHC)」と名付けた。AHC
の利点は
CVTの応答性と
HCの収束精度を両 立できることだ。また、CVT と
HCの基本構成は単純 かつ、AHC では選択ロジックが追加されるのみである から簡易性は損なわれない。
図
4に
AHCシステムの構成を示す。AHC システム は
CVTと
HCを複合した構成であり、太陽電池の出力 電圧
Voutと
2つの参照電圧を比較して動作領域を規定 する論理を
Selectorブロックで出力する。そして、論 理回路によって
CVTと
HCで適切なアルゴリズムをイ ネーブルする。本システムの機能は以下の
4つに分類 出来る。
•
電力計算
(Power Calculation Circuit)Solar-Cell DC-DC
Converter
PCC Iout Vout
Vp
Power Temptation
Vp'
Power Comparator
T-FF
Selector
Analog Up/Down Converter
PWM Comparator CVT
Comparator Vcvt
triangle wave CVT
HC Vdty
Load
Vrefl Vrefh
図
4: MPPTシステム:AHC
•
電力保持
(Power Temptation)•
電力比較
(Power Comparison)• Duty
増減
(Analog Up/Down Counter)つまり、AHC のシステムを実現するためには電力計 算回路が必要である。
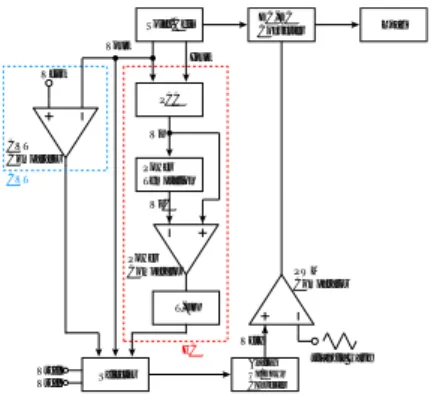
4 電力計算回路 PCC
Vdd=1.5V
+ -
Hold Switch
Cvp
Vqhold^
Vqhold Cvt
Ipcc Hold Switch
Vt
+ - Vcmp
Vp Vin
Rncfb cfb
Vqrvt
Icmp
Icfb 6uA
Vqpcc
cf3
LX VLX
図
5: PCC:回路図
(5)は
PCCの電力計算部の回路図である。この回 路は大まかに左側が出力電圧検出、右側が出力電流検出 の役割を持つ。
電圧検出ブロックでは定電流
Ipccを容量
Cvtに充電 し、出力電圧
Voutに比例した積分区間
tcalを求める。
tcal= Cvt
IpccαVout (1)
電流検出回路ブロックでは太陽電池の出力電流
Ioutを積分区間
tcalだけ
Cvpに充電する。
vp = 1 Cvp
Z tcal
0
iout(t)dt
= αβ Cvt
CvpIpcc
IoutVout (2) (2)
式より、太陽電池の出力電力に比例した電圧
vpを 得られることが分かる。
2
0 50 100 150 200 250 300
0 100 200 300 400 500 600
Iin[mA]
Vp[mV]
Vin=0.3 Vin=0.5 Vin=0.7
図
6: Vp-Iin特性
(sim)図
(6)は
Vinを固定し
Iinを
100mA〜500mAまで掃 引したシミュレーション結果である。v
pが広範囲で線 形性を保っている。この線形性は理想値との誤差率が全 領域で
3%以内に収まっており、電力の計算が高精度で あることを示している。
0 100 200 300 400 500 600 700 800 900
0 100 200 300 400 500 600
Iin[mA]
Vp[mV]
Vin=0.3(Sim) Vin=0.5(Sim) Vin=0.7(Sim)
図
7: Vp-Iin特性
(実測)測定基板を作成し実測においても
PCCの評価を行っ た。図
(7)はシミュレーション値と実測値の比較である。
いずれの条件でも誤差
5%以下で収まり、高精度な結果を得た。よって実際の
ICでも
PCC設計の正当性と有 効性を示した。
5 PCC のノイズ検討
PCC
の測定評価において、アナログ
GNDのスパイ クノイズによって電力計算が途中で終了するという問 題がおきた。MPPT システムには正確な電力値が不可 欠であるためノイズによる誤動作は致命的問題である。
ゆえにノイズ原因の解析と改善を行った。
PCC
のスパイクノイズはスイッチングノイズであり、
その主因となるのが
DC-DCコンバータを駆動するパ ワー
MOSスイッチである。チップ外部の接続や構成を 変えてもスパイクノイズは変化しなかったため、アナロ グ
GNDへのノイズの伝搬は
ICチップ内部の基板結合 が支配的であると判明した。
Cgs Cgd
Csb Cdb
Cgb
図
8: MOSトランジスタの寄生容量
パワー
MOSによるノイズ源となりうるのが基板との 接続点であるバルクに付いた接合容量であり、特にノイ ズに寄与するのがドレイン-バルク間容量の
Cdbである。
この容量に加わる電圧はスイッチングに伴って大きく変 動するため、その電圧変動分の電荷が基板へのノイズに なる。接合容量を小さくすればこの影響を低減できる ため、パワー
MOSのレイアウトを格子型から櫛型へと 再設計した。櫛型構造を用いることで接合面積が減り、
Cdb
は
72%、バルクから流れる電流は51%低減した。図
9:パワー
MOSのレイアウト
次にノイズの伝搬経路であるシリコン基板だが、測 定
ICチップの基板は抵抗率
0.01Ω·cmの高濃度基板 の上に抵抗率
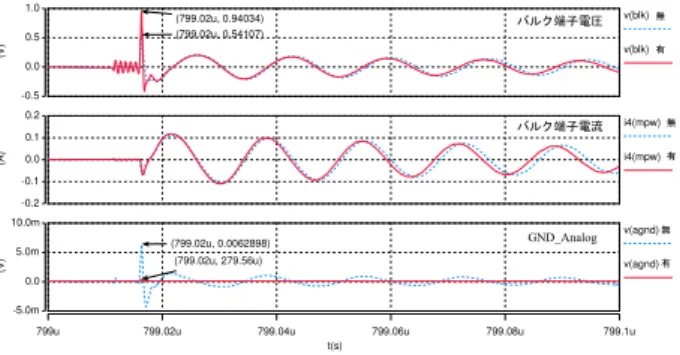
10Ω·cmのエピ成長層がある多層構造を とっている。低抵抗の高濃度基板がノイズの伝搬を助 長しており、基板のインピーダンスを上げることがノイ ズ低減につながる。そこで、Deep N-Well を用いてパ ワー
MOSのバルクとシリコン基板を絶縁する。Deep
N-Wellをモデル化してシミュレーションを行い有効性 を評価した。図
(10)はその結果だが、アナログ
GNDのスパイクノイズを
96%低減した。6 提案 MPPT の評価
太陽電池の等価回路を
DC-DCコンバータの入力とし て
MPPTシステムのシミュレーションを行い、CVT、
3
図
10: Deep N-Wellの有無における特性の比較
HC、AHCを比較して提案手法の有効性を示す。第一に 収束速度を評価する。
MPPTは定常状態に入ると
MPP近傍で振動するため定常状態に入るまでに要した時間 を比較する。
AHC
HC
CVT MPP
図
11: MPPTシステム過渡状態の比較 図
(11)は太陽電池の
Ish=100mAのときの各
MPPTア ル ゴ リ ズ ム の 過 渡 特 性 を 比 較 し た も の で あ る 。
CVT,AHCは
2ms〜3msで定常状態へと入っているが、
HC
はその倍以上の
5msを要している。この結果より 適応的に
CVTを用いて
MPP近傍への収束を速めると いう
AHCの有効性が分かる。
第二に収束精度を評価する。出力電力の平均値と太陽 電池の
MPPと比較するとともに、平均値からの変動率 を求め、収束の安定性を測る。
表
1: MPPTシステム評価:収束精度
Ish[mA] Pideal[mW] システム Pave[mW] 誤差[%] 変動率[%]
CVT 32.3 6.02 17.1
100 34.4 HC 32.8 4.75 8.09
AHC 33.2 3.58 6.79
CVT 93.2 3.18 8.32
300 96.3 HC 95.8 0.545 2.15
AHC 95.6 0.711 2.25
CVT 136 4.18 5.53
500 142 HC 140 1.90 3.01
AHC 142 0.502 1.51
表
(1)は評価結果であり、AHC は各条件において理 想値との誤差
5%未満、かつ変動率は二条件で3%以下であり
HCと同様の安定性を示した。この結果より
HCを用いて
MPPへの収束精度を高めるという
AHCアル ゴリズムの有効性が分かる。
提案手法である
AHCシステムはノイズの影響によっ て所望の動作を実現できない可能性がある。そこでシス テムに疑似的にノイズを加えて影響を検討し、さらに前 節で示した改善策の有効性を評価する。
142m
図
12: Ish=500mAでの
AHCシステム動作比較 図
(12)は太陽電池の
Ish=500mAにおいて、通常時、
ノイズ印加時、ノイズ改善時の出力電力の収束を比較し たものである。ノイズを加えると通常時の収束点から大 きくずれてしまうが、通常時とノイズ改善時は同様の傾 向で推移していることが分かる。
表
2: AHCシステム評価
Ish[mA] Pideal[mW] システム 過渡時間[ms] Pave[mW] 誤差[%] 変動率[%]
AHC(通常) 142 5.25 0.502 1.51
500 142 AHC(ノイズ) 129 5.81 9.15 12.6
AHC(改善) 138 5.46 3.02 3.33
AHC
システムの通常時、ノイズ印加時、ノイズ改善 時における収束精度を表
(2)に示す。Ish=500mA では ノイズを加えた場合、
MPPとの誤差
9%、変動率13%以上と収束精度が悪化するが、ノイズ改善策を施した場 合は、誤差・変動率を
3%以下とノイズによる影響を抑えられる。この結果はノイズ改善策の有効性を示して いる。
7 結論
本論文ではアナログ回路構成
MPPTシステムの提案 を行った。提案システムの根幹を成すアナログ電力計算 回路の有効性をシミュレーションと測定チップの評価に よって示すとともに、PCC のノイズ原因を解析して改 善策を示した。既存のアルゴリズムと提案アルゴリズ ムでの
MPPTシステムの比較評価を行い、提案
MPPTシステムの有効性を示した。
参考文献
[1] Trishan Esram, Patrick L. Chapman”Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques”, IEEE TRANSACTIONS ON ENERGY CONVERSION,VOL.22,NO.2, JUNE 2007
4