1識│(動諭幻 ■ 鳳 鳳な話 I● ■1鳳焉 ∴ ■ ■ ■ 瘍 藉 計 ■ ■ ■ 樵 編 榊■
心理学における
3次
元視研究の動向‑2003‑
3-Dimensional Perception: 2003 Research Thends
林 部 敬 吉
Keikichi HAYASHIBE
抄録 :視 覚心理学 における3次元視研 究 の2003年の動 向 を,両眼立体視,運動 要 因 に よる3次元視,
絵 画 的要 因 による3次元視,奥行 距離知覚 に分類 して報告 した。
Abstract: The papers of 3‑dilnensional visual perception in 2003 were reviewed in the rlelds of stereoscopic vision,depth hm mo■on cue,pictorial cucs and virtual reality.
1日 はじめに
本報告 には,心理学 における3次元視知覚の 研究論文 を,Psychologic」 Absttact誌の 2002年 版から抽出 し,両眼立体視,運動要因による3次 元視,絵画的要因による3次元視,奥行距離の 知覚に分類 して紹介 した。
2日 両 眼立体視
2.1.両眼立体視閾と空間周波数帯域
初期の視覚処理過程 は空間周波数特性 をもつ ニューロンか ら構成,両眼立体視処理過程 にも 存在する。 しか し,両眼立体視処理過程での空 間周波数チャンネルの役割 については,い くつ かの問題がある。位置視差 を検出する受容野に ついて初期 に提案 されたモデルでは,受容野の 大 きさは特別な役割 を与えられていないが,視
差が位置視差ではな くフェーズ視差 によって コー ド化 され る とす るモ デルで は,個々 の
ニューロンの空間的特性が固有の役割 を持 ち,
高空間周波数に選択的なニューロンは高密な視 差 に対応 し,低空間周波数に選択的なそれは粗 い視差に対応する(size…disparity correlation仮説)
とされる。この仮説 を実証するために,空間周
波数を変化 させ,それぞれの周波数での両眼立 体視の下限閾 (D血)と上限閾 (DInax)と が測定 され,その結果,空間周波数が2.4c/deg以下の 場合 には,D血は空間周波数に依存 して変化す るのに対 して,DIIlaxは空間周波数が変化 して も 一定 となることが見いだされた (schor&wood
1983)。 この結果は,空間周波数チヤンネルが空
間周波数2.4c/deg以下の場合 に両眼立体視の処 理過程 と関係 を持つ ことを意味す る。そこで,
Hess et al。 (b)は,図 1に 示 されたようなステレ
オグラムを作成 し,Dmlnと 臨 を測定 した。ス テ レオグラムは,フィルターをかけない もの,低 域濾過 したもの,高域濾過 したもの,帯域濾過 した ものの4種類が作成 され,これ らを両眼立 体視す る と中央付近 に円盤が浮 きでて視 える。
D血 とD颯は,円盤が手前にあるか,後方 にあ るかを判断させて測定 された。
その結果,低域濾過条件の場合のDminは,濾
過後 にそのステレオグラムに含 まれる最大の高 空間周波数 に依存 して小 さくなるが,高域濾過 条件のそれは,低域空間周波数に依存 しては変 化 しないことが示 された。一方,Dmaxは低域濾 過条件では変化 しないが,高域濾過条件では空
間周波数 に依存 して小 さ くなること,さ らに
Dmaxは出現 させるイメージの大 きさに依存 して 変化 した。これ らの結果か ら,Dmi。 とDmaxはそ
尉科 劉喘 塊 封 刊 t b.
辟
一¨
・︲ 華
(A) no filtering
(B)10W・ pass f‖ teFing(●utOff=2.5cycrdeg)
(0)high‐pass にOri晨│(etttOff=2.5cycrdeg)
(D)band=pass f‖ tering(paSSIland:1.25 toll10cy,ノ dog)
図1
フィルター濾過 しないステレオグラム (A),低域濾過 したステレオグラム (B),高 域濾過 したステレオグラ ム (c),帯 域濾過 したステレオグラム (D)の 4種類 のステレオグラムで,これらを両眼立体視すると中央 付近に円盤が浮きでて視える (Hess,ct al..2002)。
れぞれ異 なった処理過程 に担 われている と考 え られ る。
2.2.対応 問 題
Pc甘。v03)は,図 2に示 された ような対応 問題 を実験 的 に検討 した。曖味 な対応 を もつ1対の 刺激がステ レオグラムの中央 に横並 びで提示 さ れ,それ を上下 に挟 む ように刺激対が 同一の奥 行距離 に提 示 され る。 この ようなステ レオグラ ム を両眼立体視す る と,中央 の点が上下 の2つ の点 と垂直方向に同一の奥行距離 をとって並 ん で視 えるか,あるいは中央 の̀点が奥行位置 をは ず れて視 えるかす る。す なわち,左右網膜像 の2
図2
曖味な対応 をもつ 1対 の刺激がステレオグラムの中央 に横並びで提示 され,それを上下に挟むように刺激対 が同一の奥行距離に提示 される(a)。 左右網膜像の2 点の対応 を考えるとき,左網膜像の右位置にある点 と 右網膜像の右位置にある点,左網膜像の左位置にある 点 と右網膜像の左位置にある点 とがそれぞれ対応する 場合 (Long Disparity Match,LMG,灰 色丸で表示)と,
左網膜像の右位置にある′点と右網膜像の左位置にある 点,左網膜像の左位置にある点 と右網膜像の右位置に ある点 とがそれぞれ対応す る場合 (Short Disparity Ma h,SMG,黒丸で表示)とがある(b)(PctrOv,2002)。
点 の対応 を考 える とき,左網膜像 の右位置 にあ る点 と右網膜像 の右位置 にある点,左網膜像 の 左位置 にある点 と右網膜像 の左位置 にある点 と がそれぞれ対応す る場合 (Long Disparity Match,
LMG)と,左網膜像 の右位 置 にある̀点と右網膜 像 の左位 置 にあ る点,左網膜像 の左位置 にある 点 と右網膜像 の右位置 にある点 とがそれぞれ対 応 す る場合(Sho■Disparity Mttch,SMG)と があ り,前者 の対応 を持つ場合 に上下 に3点が 同一 奥行距離 に定位 して視 える。実験 は,上下の点
と中央 の ターゲ ッ ト間の距離お よび ターゲ ッ ト の大 きさを変 え, どの ような対応が得 られるか について検討 された。
その結果,上下 の点 と中央 の ターゲ ッ トとの 間の距離が小 さい ときにはLDG対応 が生 じ,そ の間の距離が拡大す るにつれてsDGに移行 し た。 これ らの結果 は,あい まいな視差対応点が あ る場合 の視差対応 は,視差 を構成す る刺激要 素 の形状性 (形状 の文脈効果)によって対応点 が捕捉 (Capture)さ れ決定 される場合があるこ
とを示唆す る。
2.3.両眼立体視 における トランジ ェン トとサステイン ド型
両眼立体視には トランジェント型とサステイ ンド型とがある.サステインド型のステレオグ ラムは,通常の立体視でパヌムの融合範囲内で 立体視が可能であ り,また左右 の網膜像 の方向,
空 間周波数,明る さコン トラス トが等 しくなけ れば立体視 は生 じない。一方 トランジェ ン ト型 の立体視 では,2重像 となるス テ レオ グラムで も,短時 間提 示す る と,一時的 に立体視 が可能 であ り,左右 の網膜像 の方 向,空間周波数,明
る さコン トラス トが異 なって も融合で き,立体 視 が生 じる (schOr,et al.1884,Schor&Heckman
1989,Schor et al.1998,Edwards,ct al.1999,Pope et al.1999)。 そ こで,Schor,ct al.(28)は ,左右 ステ
レオグラムペ アの刺激全体 の大 きさが著 しく異 なる場合 に トランジェン ト型立体視が成立す る か を検討 した。ステ レオグラムは,図 3に示 さ れた ように,ガ ボール関数で記述 された小片(ガ ボール ・パ ッチ,Gabor patch)で ,ガボール関
数 のエ ンベ ロープの大 きさ(の が3オ クターブ の範 囲内で変 え られる(0.2°,0.25°,0.37°,0.6°,
0.75°,1.25° ,2° ,2.5°)と ともに,左右 ステ レオ ペ アの一方のエ ンベ ロープの大 きさが4種類 の 大 きさの どれか に固定 され,他のそれは4段階
に変化 させ られた。左右ステ レオペ アの刺激 は 同方 向条件,互い に直交方向の2条件,そして
視差 は小 さな視差 と大 きな視差条件 (0。 5°,5°),
さらに左右ステ レオペ ア間の コン トラス ト比 を 操作 した条件 とが設定 された。左右 ステ レオペ ア間の コン トラス ト比 は,片方 の コン トラス ト (パター ンはσ=0.25° の ガボールで表示)を 100
%に固定 し,他方 (パター ンは σ=1.5°,2.0° あ るいは2.5°で表示)のそれ は20%から100%ま で5段階 に変化 させ られた。 トラ ンジェ ン ト型 立体視 では,刺激提示時間は 140 msで,サステ
イ ン ド型立体視 でのそれ は7sであ る。実験 で は,観 察者 はステ レオグラム を両眼立体視 し,交 差 あるい は非交差で提示 された刺激パ ター ンが 手前 に視 えるか,あるい は後方 に視 るかの判断 が求め られた。
実験 の結果,(1)小さな視差条件 の場合 には,
トランジェ ン ト型 とサステイン ド型立体視 とも,
左 右ステ レオペ アの刺激のエ ンベ ロープの大 き さの差が2オ クターブの範囲内な らば立体視が 成立す るこ と,(2)左右ス テ レオペ アの刺激の 方 向が互 い に直交す る場合,サステイ ン ド型立
体視 で は刺激 のエ ンベ ロープが大 き くなるに伴 い,立体視 の成立 は減 じる こ と,(3)大きな視 差 の視差条件 の場合, トラ ンジェ ン ト型立体視 で は,左右 ステ レオペ アの刺激 のエ ンベ ロー プ の大 きさの差が3オ クターブになって も立体視 が成立す ること,(4)左右 ステ レオペ ア間の コ ン トラス ト比 を変 えた場合, トラ ンジェ ン ト型 立体視 では,パター ンの ガボール帯幅 (の が大 き くなるほ どコン トラス トの差が5%からlo%
まで小 さ くした ときに立体視 の成立が顕著 に高 まるこ と,などが明 らか にされた。 これ らの結 果 か ら,ガボールパ ター ンにおけるエ ンベ ロー プに対 しての視覚 システムの同調 は,それ 自体 は広範囲な帯幅 に同調す る ものの,ステ レオペ
ア間の空 間周波数の違 い,パター ンの方向の違
い,コン トラス トの違いほ どは立体視成立 のた め には大 き くはない こと, したが って, トラ ン ジェ ン ト型立体視 ではガボールパ ター ンのエ ン ベ ロープの大 きさが,ステ レオペ アの対応 問題 解決 の初期過程 で は重要 な役割 を呆た している 図 3
ガボール関数で表示 された小片 Gabor patch)か ら構成 されたステ al..2001).
(ガボ ー ル ・パ ッチ,
レオ グ ラ ム(schOr,ct
ことが示唆 される。ステレオグラムのガボール パ ターンのエ ンベロープの大 きさとそのガボー ルパ ターンを構成する波形 に関する情報は,粗
い視差から細かな視差 を検出する一連の過程で,
ステレオペア間の対応 を解決するために共に利 用 され,またエ ンベロープの大 きさか ら抽出さ れた2次的情報は,細かな視差対応 を見つけ出 すのに有効 に働いていると考えられる。
2.4.両眼視 差 と視 差 輻 襲融 合 との 関係 両眼視差 と視差輻榛融合 とは,同一の神経過 程で処理 されるのか,あるいはそれ ら2つの入 力情報 は,視差情報 として最初 は第 1視覚野 (Vl)で検出 され,次いで別々に処理 されるの か,さ らにはそれ ら2つの処理過程 は単独で独 立 しているのか,などについては十分 には解明 されていない。 もし両眼視差 と視差輻榛融合 と が同一の神経過程で処理 されているならば,両
眼視差 に対する奥行弁別能力が良い ものは,そ
の視差輻軽融合能力 も高 く,逆に,両眼視差弁 別能力が劣 るものは,その視差輻榛融合能力 も 劣 るといえる。事実,粗い視差 (30分以上)に 対 してステレオアノマ リ (両眼立体視異常)を 示す もので,交差視差 に対する能力 を欠 くもの は,交差視差 に対する輻榛融合 も欠いているこ と, しか し非交差視差 に対する開散融合能力は 保持 していることが見いだされている(Richards 1971,Johns 1977).ス テレオアノマ リを示す もの すべ てが輻榛融合異常(バージェンスアノマリ)
を示 さないが,しか し輻榛融合異常 を示す もの はステレオアノマ リを示 している。各眼での網 膜像が融合で きない二重像の場合の輻榛融合 と, 両眼融合で きる網膜像の場合の輻襲融合 とは, 基本的に,その神経処理過程が異なる。視差が 小 さ く両眼融合が十分 に可能な場合 (30分以 内),輻榛融合 に異常 を示す ものが視差にもとづ く立体視が不能か否かは,いまだ不明である。そ こで,Fredenburg&Harwerth(И )は,ステレオア ノマ リである と診断 された者 を被験者 として,
両眼視差立体視能力 と視差輻榛融合能力 をしら
べた。視差輻榛融合能力の測定は,両眼立体視 中のステ レオグラムにノニウス線 を上下 に提示 し,上線 は基準線 とし,下線 を右あるいは左の 位置 (‑20,‑10,0,+10,+20)に 提示 し,その位置 を報告 させる方法(恒常法)で 測定 し,そ のPSE が交差視差 と非交差視差別 に求められた.また,
ステレオグラムにはガボールパ ッチで構成 され たパ ターンが用いられた。
実験の結果,(1)視差力Ⅵヽさい場合 にも,ス テ レオアノマ リとバージェンスアノマ リが存在 すること,(2)ステレオアノマ リの型 (交差視
差不能あるいは非交差視差不能型)とバージェ ンスアノマ リの型 (交差視差輻榛融合不能 と非 交差視差輻軽融合不能)との間には関連が無 く,
交差視差不能が交差視差輻榛融合不能 とはなら ないこと,(3)両眼立体視が正常な者 にもバー ジェンスアノマ リが存在すること,などが見い だされた。 とくに,両眼立体視が正常な者 にも バージェンスアノマ リが存在することは,両眼
視差過程 と視差輻榛融合過程 とは,第 1視覚野 で視差 に選択的なニューロンによつて視差が検 出された後では,それぞれ別個 に独立 して処理 されることを示唆する。
2.5.両眼立体視 にお け る色 相 対 比 感 受 メ カ ニ ズ ム と輝 度対比 感 受 メカニ ズ ム の相 互作 用
輝度が等 しく色相のみが異 なるステ レオグラ ムの立体視 (色相立体視chrOmatic stereopsis)の 可否については多 くの研究がなされ,その結果,
色相立体視は可能であるが,立体視可能な視差 は限定 され,立体視力 も悪 く,さ らに輝度対比
による立体視 に比較 して,ランダム・ドット・ス テ レオグラムのように立体視が出現 して初めて 形状が知覚で きる条件での立体視能力が劣 つて いることなどが,これまでの研究で明 らかにさ れている(Kingdom&SiIIIlons 2000)。 これ らの 結果か ら,色相立体視の対応問題の解決 には,ま
ず,ステ レオグラムの色相のひとつひとつにラ ベル付 けがなされ,次いで,そのラベルが同一
の もの同士の間で対応づけがなされると考えら れた。
一方,色相対比 にもとづ く立体視過程 と輝度 対比にもとづ く過程 とはそれぞれ独立 していて,
それ らの過程で個々別々に検出された立体情報 が,これ以降の過程で統合 されて,ひとつの立
体視が出現するとい う考 え方 も提起 されている (Si―ons&Kingdom 1997).
そこで,これら2通りの仮説のいずれが妥当 かを検証する試みが,SiIImons&Kingdom 1291に
よってなされた。ステレオグラムはo.5cpdの垂 直方向の空間周波数からなるガボールパ ッチで,
そのエ ンベ ロープの標準偏差は1°である。等輝 度条件のステレオグラムでは,輝度 を等 しくし,
色相対比は赤一緑で表示 し,また等色相条件の ステレオグラムでは,色相 を等 しくするために 一色 (黄色)で ,輝度対比は黒で表示 された。さ らに,色相 と輝度の複合ステレオグラムが作成 され,こ こでは色相対比 と輝度対比が導入 され た。各ステレオグラムでは,左右ステ レオペア の刺激属性 (色相 と輝度)が対応 を もつ もの (correlation)と,その対応が反対 を示す もの
lanti‐correlation)とが作成 された。実験では,各
条件のステレオグラムが提示 され,その立体視 閾値が求め られた。
その結果,(1)立体視閾は色相対比あるいは 輝度対比が増大す るに伴 って,向上すること,
(2)しか し,輝度対比条件でのステレオグラム に,反対極性 をもつ色相対比 を加えると,立体 視は妨害 されること,(3)同様 に,色相対比 を もつステレオグラムに反対極性 を持つ輝度対比 を加えると,立体視 は妨害 されることが見いだ された。これ らの結果は,両眼視差が検出され,
そ して立体視が成立する前の段階で働 く色相対 比感受メカニズムと輝度対比感受メカニズム間 に,立体視成立にとってポジティブなそ してネ ガテイブな相互作用が存在することを支持する。
2.6.両眼視差 と運 動視 差 の手 がか りの 統 合
両眼視差 と運動視差が共にある空間周波数 を もつサイン波状の凹凸パターンを表示するとき,
両眼視差が表示する周波数 と運動視差が表示す る周波数 とが異なる場合 には,それ らの異なる
波形の合成 された凹凸パ ター ンが知覚 される (Rogers&Cone■ 1989,Uomo五 &Nishda 1994).
出現する形状 は,両要因の合成で決 まるが,そ の奥行 も加算的な合成で決 まるかはいまだ不明 である。そこで,サイン波状パ ターンの空間周 波数をo。125,0.25,0.5,1.O cPdの 5段階に設定 し,
これにもとづいて両眼視差 と運動視差で提示す る空間周波数パ ターンは,これ ら5種類の空間 周波数 をすべて組み合わせて(25通 り)提示 し,
その際に観察 される凹凸パ ターンと奥行量が し らべ られた (Ichikawa&Sdda 00).凹凸パ ター ンは描画 させる方法で,奥行量は別 に提示 した 直線の長 さを調整 させる方法で求め られた。そ の結果,視えの形状は,両眼視差 と運動視差が 提供する形状の合成 となるか,あるいは運動視 差要因のみで決め られた。また,視えの奥行量 も,両要因が提供する奥行量が増大すると,そ れにともなって大 きくなった。これ らの結果は,
両眼視差 と運動視差が提供する形状 と奥行量は,
それ ら両要因の加算的総和で規定 されることを 支持する。
2.7.運動 す る ドッ トで生 起 さ せ た エ ッ ジ (kinetic edge)間 0両眼視 差 にも とづ く立体視
両眼視差 にもとづ く立体視は,輪郭線で構成 された対象の間に水平方向の位置による視差 を つけることによって生み出されるのが通常であ るが,運動要因によって導入 したエ ッジによる 位置視差 によつて も可能になる。例 えば,運動 要因によって出現 させた対象間に視差があれば,
対象 を構成するテクスチャの ドットが左右のス テ レオペ アで非対応で も立体視が出現す る し (Lee 1970,Halpem 1991),ま たテクスチ ャを構
成す る ドッ トを左右 ステ レオペ ア間で対応 を とつてフリッカーさせることによって視かけの 図形 を誘導 し,その誘導 した図形間に視差があ れば,テクスチャ間に左右で対応が無 くても立 体視 は出現する(Prazdny 1984)こ とが明 らかに
されている。
Poom(2)は ,新たに,対象の面のテクスチ ャ を構成する ドットの相対的運動で作 り出された 視かけのエ ッジ (kinetic edge)間に位置視差 を 導入 し,両眼立体視が可能 になることを次の よ うな刺激条件で示 した。図4にあるように,左
右のステレオ画像は ドットで構成 され,両眼立 体視するとダイヤモ ン ド形が中央 に浮かび上が る (図4(a))。 これ らの各ステレオペアの運動 する ドッ トは,ペア間で常 に非対応であるが,そ れ らの ドッ トが一体 となって回転運動する時,
ドッ トが浮かび出るダイヤモン ド形のエ ッジを 通過する際に出現 と消失 を繰 り返す ように操作 する (図4(b))。 このように運動要因で出現 さ せ る各ステレオペアでは,浮き出させるダイヤ
モン ド形のキネテイック・エ ッジ間の両眼視差 は水平方向へのシフ トを導入することによつて もたらすが,その内部で回転運動する ドットの 中心は左右同一 とし,視差はゼロとする。また ダイヤモ ン ド形の内部 と外部では,回転する運 動方向は互いに逆方向 とする (キネテ イック・
エ ッジ視差,図 4(c)).方向視差 (direction disparity)は,ダイヤモ ン ド形の内部で回転する
ドッ トの中心 を水平方向に左右でシフ トするこ とによつて もた らす。この際,キネテ イック・
エ ッジと外部で回転する ドットの回転軸 とは左 右ペアで同一 とし, したがって視差はゼロとす る (方向視差,図 4(d)).さ らに,対応のある フリッカー視差条件では,左右ペアで対応 を持 つフリッカーのエ ッジは浮 き出るダイヤモ ン ド 形のエ ッジが水平方向に反復移動する際 に,そ
のエ ッジの側の静上 した ドットを消失 させるこ とによつて導入 した。このようにすると,視か
け上,骨組みで構成 されているが実際にはその 輪郭が見えないダイヤモ ン ドが通過すると,静
止 した点は消失 し,それが通過 して しまうと再 出現するように知覚 され,その際に明瞭なダイ ヤモ ン ド形が見 える。この条件の視差は,ダイ
ヤモ ン ドの水平方向の位置視差で導入する。
実験は,立体出現するダイヤモ ン ド形が基準 として設けた斜め十字 (視差はゼロ)の前か後 ろか を判断 させ,その正確 さを求めることに よって行 なわれた。その結果,キネテ イック・
エ ッジ視差 と対応のあるフリッカー視差条件で は,正確 な両眼立体視が出現 したが,方向視差 条件では視差が0。7度と1度 の場合にのみほぼ正 確 な立体視が得 られるにとどまった。
そこで,図4(e,0に示 したように,テクス チャの無い領域 (ギャップ)をつ くり,しか も 左右のペアでテクスチヤ領域 と無テクスチャ領 域 を交互に配置 したステレオグラムを作成 した。
また,テクスチ ャ領域 と無テクスチャ領域の間 の大 きさ比が変えられ,テクスチャ領域が無テ クスチ ャ領域 を上回る場合(ネガテイブ条件)に は,左右のステレオペア間のテクスチ ヤ領域 に 重なる部分が生 じる。先の実験 と同様 に,キネ テイック・エ ッジ視差,方向視差,フリッカー 視差の各条件 を設定 して両眼立体視 させたとこ ろ,すべ ての視差条件で,かつ左右ペアで重な
る部分が無いテクスチャ領域 を持つ条件 (ポジ テイブ条件)でも,立体視の出現方向の正確度 は減 じるものの,立体視が可能なことが示 され た。
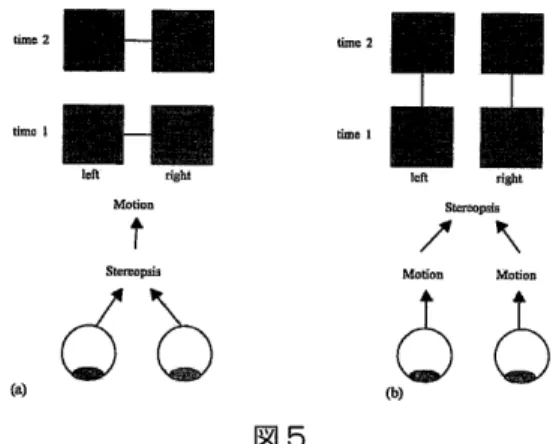
図5
両眼立体視か ら運動視 を復元する処理過程(a)と運動 視か ら両眼立体視 を復元する処理過程 (b)(Poom,L.
2002)。
これ らの結果は,左右眼ではテクスチ ャ対応 を持たないが,各眼では継時的対応 を持つステ レオキネマ トグラムで両眼立体視が可能なこと,
すなわち,まず,各眼で運動要因に基づ くエ ッ ジの検出がなされ,次いでこの検出されたエ ッ ジにもとづ き左右眼で両眼視差の対応がなされ,
立体視が出現することを示 した。このプロセス を図示すると図5(b)と なる。因みに図5(a) に示 した ものは,キクロピアン運動 (cyclopean motion,Patterson,1999)の 視覚処理過程で,こ こ では,左右眼でテクスチャ対応 を持つが,継時
的には対応 を持たないステレオキネマ トグラム があ らわされている。これは運動視か ら立体視 を復元する過程 と立体視か ら運動視 を復元する 過程 とがそれぞれ独立 して存在することを意味 する。
2.8.垂直視差 と対象 までの絶対奥行距離 水平視差は対象間の相対奥行距離 を規定する が,対象 までの絶対奥行距離(egocentric distance)
を規定 しない。絶対奥行距離 を見積 もるには他 の付随的な奥行手がか り,たとえば,網膜像外 の要因である眼筋的手がか りなどを必要 とする。
しか し,眼筋的手がか りのみでは,正確 な絶対 奥行距離の知覚には不十分なことが知 られてい る (Benner&van Dallme 1998)。 これまでの研
究によれば,垂直視差は,水平軸 を中心 とした 傾斜面 (slant)の知覚 (Backus,et」。1999),対 象の大 きさ知覚 (Bradshaw et d。 1996),対象間 の奥行 (Bradshaw et d。 1996),対象面の湾曲性 の知覚 (Rogers&Bradshaw 1995),絶対奥行距 離 (Rogers&Bradshaw 1993)が 関係する。 し か し,これ らの結果は,必ず しも垂直視差が絶 対奥行距離知覚を向上 させ ることを意味 しない し,また垂直視差が水平視差にもとづ く距離知 覚 を向上 させ ることも意味 しない。そこで,垂
直視差が絶対奥行距離知覚 にどの程度の効力 を 持つかが,Bremer et alo 181に よつて確かめられ た。この研究では,水平視差の代 わ りに水平大 きさ比 (hoHzontd size ratio)を ,また垂直視差 の代わ りに垂直大 きさ比 (verticJ size ratio)を
用いている。水平大 きさ比 とは両眼間の分離が,
両眼間を結ぶ線分に平行な軸上に生 じる比率 を 意味 し,垂直大 きさ比 とは両眼間の分離が両眼 間の線分 に垂直な方向に生 じる比率 を指す(「片 眼の網膜上 に投影 された対象の高度」対「他眼 の網膜上に投影 された対象の高度」)。 とくに,垂 直大 きさ比は,対象 までの絶対距離 と対象の網 膜上での偏心度で異なる(図 6参照)。 このグラ フか ら垂直大 きさ比は対象の網膜上での偏心度 がわかれば,絶対距離 を復元で きることを示す
(図 6A)。 また,垂直大 きさ比は,対象 までの観 察距離が大 きくなるに伴い増大する。垂直大 き さ比の偏心度 に伴 う水平勾配は,ほぼ一定であ り, したがつて偏心度 とは独立に対象の絶対奥 行距離の知覚に,原理的には,これを利用で き
る。
そこで,視覚システムが対象 までの絶対奥行 距離 を知覚する上で,垂直大 きさ比 を利用で き
るのか,あるいは垂直大 きさ比の偏心度に伴 う 水平勾配を利用 しているかが試 された。提示 し た刺激は,楕円球であ り,これはテニスボール をシミュレー トした ものである。観察者には液 晶シヤッターを装着 して,これを両眼立体視 さ せ,また対象の絶対奥行距離の測度 として,楕
円球 を実際のテニスボールに視 えるように,そ
Al,L
01 15 30 45‐
eccentttdty ldeg)
図6
対象 の網膜位 置 (偏心度)の関数 としての垂直大 きさ 比.パラメー タは対象 までの観察距離 (Brelllller et J。.
2001).
の直径の大 きさと深 さとを調整 させた。楕円球 は,正中線上に視線 を配置 した条件 と視線 を正 中線か ら右方向30度に配置 した条件 とで提示 さ れ,また観察者か らの距離は35,50,65 cmに
シミュレー トされた。その結果,実験で得 られ
た絶対奥行距離測度は,正中線上に視線 を配置 した条件 と視線 を正中線か ら右方向30度に配置 した条件 とで同等であった。このことか ら,垂
直大 きさ比の偏心度 に伴 う水平勾配が絶対奥行 距離 に随伴 して変化する形状や大 きさを調整 し ていると考 えられる。
2。 9。 垂 直 視差 と方 向の定位 知覚
垂直視差要因単独で対象の視 えの方向定位 を 規定するかが,Btth et do ③ によって実験的に 検討 された。 これまで,対象の視 えの方向定位
を規定するのは,輻榛要因 と網膜上の偏心度で あることが確認 されている。図7に示 されたよ うに,対象の方向定位 (a)は,幾何学的には,
左右眼の網膜上に投影 された対象のそれぞれの 偏心度の平均値(γ)お よび左右眼の対象 に対す る回転角度の平均値 (の (対象 と各眼を結ぶ線 と視線 との間になす角度の平均,図中の算出式 を参照)をそれぞれ加算 して2で 除した値で規 定され,次式のように表される。
a=,+δ
一方,垂直視差要因単独での対象の視 えの方向 定位 は,原理的には,垂直視差 と絶対距離の手 がか りである輻軽角 (μ)と で規定 される。この 場合,垂直視差 を,左右眼の網膜上の対象の投 影位置の高度の比率(VSR=ユ‐ μ)である垂 直大 きさ比で規定すると便利である。 したがつ て,垂直視差要因単独での場合,対象の方向定 位 は次式で表 される。
a=tan4(hvsR/の
この場合,輻榛角が網膜イメージか ら推測で き れば,垂直視差単独で方向定位がはかれること になる。
図7
両眼観察事態の幾何学的関係 (B田趨,et」 ..2002)。
0亭璽ON
一0二一t〇0O>
5
4
3
2
1
0・
f 8い
︐00re一︶一
︐R IB
■9
DD ︺︒
C︒
. ︒C
﹁﹄0 一L ON 0
110
Viewing GeomehY
刺激は,ハプロス コープを用いて提示 された。
ハプロスコープの左右の先端にはCRTが設置 さ れ,それ らはハーフミラーとともに,垂直軸 を 中心 に回転で きる。刺激はランダム・ ドットで 構成 された矩形面で,その傾斜 (slant)は‑30度 か ら30度の範囲で不規則 に変化 させ,また19 cm あるいは57 cmの 距離 に提示 された。刺激の方 向定位 は,眼球位置 による方向定位 (刺激 を異 なる方向に実際に位置 させることで操作)と垂 直視差 にもとづ く方向定位 (片眼の垂直方向を 拡大することによつて垂直視差 を変化)とを独 立 に, しか も抗争的条件で操作 された。実験の 結果,視えの方向定位 は,眼球位置 にもとづ く 眼筋的手がか りと網膜上の対象の偏心度 によつ て十分 に規定 されていて,垂直視差 は,何らの
役割 も果た していないことが確認 された。
また,垂直視差が対象の方向の知覚に関わ り があるかについて,Berends,et al。 )に よつて し らべ られた。いま,対象が観察者の真正面 に存 在する時,左眼に垂直方向のみ拡大 したステレ
オ画像 を入力 させれば,左右眼に垂直視差がつ き,その結果,対象は左眼方向に変位 して見 え ると予想 される。ステレオグラムは赤あるいは 緑 のラ ンダム ドッ トで構成 され,赤緑 フイル ターメガネを装着 させて両眼立体視 させた。左 右ペアの拡大率は,3%と 6%と し,視かけの 方向変位 は27度と64度 になると計算 された。実 験の結果,9人の被験者の中で5名の ものは,片
ull拡大ステレオグラムに5分間順応 させた場合 にのみ,拡大率に応 じた視かけの方向変位が生 起すること, しか し,順応過程がな く直接観察 させた場合 には視かけの変位が起 きないことが 確認 された。これ らの結果か ら,視覚システム は,垂直視差 にもとづいて方向定位 を変位 した のではな く,順応中に左右のステレオペアの不 一致 を解消するために遠心性の眼球位置情報 を 変更 したと考えられる。
2.10.両眼立体視が成立 しないステレ オグラム
ステレオグラムを構成する要素の中,視差対 応部分の色相が異なるものの,等輝度 に設定 し たステレオグラムでは,両眼立体視が成立 しな
い とする報告 (Gregory 1977,Lu&Fender 1972) か ら,立体視が残存するという報告 (De Weert
&Sadza 1983,Jinlenz,ct al。 1997)まであ り,実
験結果が一致 しない。このような結果の不一致 は,眼球の色収差の問題,あるいはモニター上 に等輝度 に刺激要素が提示 されていないな ど の人為的エラーが完全 に除去 しにくいためと考 えられる。そこで,Kim&Mollon(r)は,コン
トラス ト比が高いために輪郭が明瞭な赤 と緑の 小矩形か らなるステレオグラムを作成 し,その 赤 と緑の小矩形の輝度 を等 しくしたところ,立
体視は成立 しないことを確かめた。 さらに,彼
らは,等輝度の赤 と緑の小矩形か ら構成 された ランダム・ステレオグラムのなかで緑の小矩形 の大 きさ (4× 4 pixels)を赤の小矩形 (6× 6 pixels)よ り小 さくした ものを作成 した。このス テ レオグラムでは,両眼立体視が可能であった。
そこで,同様 に赤 と緑の小矩形か ら構成 され ているが,緑の小矩形の全体の輝度 を赤の小矩 形の全体の輝度 と一致するように高めたステレ オグラムを作成 して両眼立体視 させた ところ,
立体視が成立 しないことが示 された.ここでは,
視覚システムは,左右ステ レオペア間の対応間 題 を解決するために,要素の属性の違いである ところの大 きさ,明るさ,色相の3要因を利用 で きるにもかかわらず利用 されず,対応 に失敗 する。同様 な結果は,ランダム・ ドッ ト・キネ マ トグラムで も確認 された。これらの結果は,大 きさ,明るさ,色相の各モジュールは,両眼視 差のモジュール とは直接連関せず,両眼立体視 ではそれ らのモジュールで検出された情報力滞U 用で きないことを示す と考えられる。
2.11.両眼立 体視 にお ける鋏 状視 差 と 圧 縮視 差
図8に示 されたように,ステ レオペアが鋏状 (shear)にあるパ ターン,あ るいは一方の大 きさ が他方 に比べて圧縮 (compression)さ れたパ ターンを両眼立体視すると,水平方向(X軸)に 傾斜 (inclination),あ るいは垂直軸 (Y軸 )に
傾斜 した(slant)面が視 える。この とき,立体視 された面が出現するまでの潜時は長 く,また傾 斜面が確定するまでにも時間がかかる (Glllaln,
Chambers,&Russo 1988,Gillam,Flagg a%Finlay
1984)。 これは,両眼立体視 の処理過程 が,まず
視差 の対応 問題 を解決 し,次 いで奥行 と形状 を,
不連続 な視差,立体交差 を持つ視差,相対 的 な 視差量,視野 を覆 う視差 な どの視 差特性 か ら計 算す るため と考 え られている。両眼立体視が成 立す るまでの潜時測度 は,両眼立体視過程 を分
析 す るための格好 の指標 となる。
そ こで,Bradshaw,et al.151は ,図9に示 され た ように,鋏状 要因 と圧縮要因を操作 し,左右 ステ レオペ アの鋏状要 因を同一 とす るが圧縮要 因は異 なる もの (AB,CD),お よび鋏状要因 を 違 えるが圧縮要 因は同一 とした もの (AC,BD)
のス テ レオグラム をそれぞれ ランダム ドッ トで 作成 し,両眼立体視 までの潜時 を測定 した。そ の結果,鋏状 要因が異 なるステ レオグラムの潜
図8
鋏状視差 と圧縮視差.ス テ レオペアが鋏状 (shear)に あるパ ター ン,あるいは一方の大 きさが他方に比べて
圧縮(compression)さ れたパ ターンを両眼立体視する
と,水平方向 (X軸)に傾斜 (inclination),あ るいは 垂直軸 (Y軸 )に 傾斜 した(slanth面が視 える(Bradshaw, M.F"Hibbard,P.B.&Gillaln,B。 2002)。
DiffeFenCe in Comprblon 図9
鋏状要 因 と圧縮要 因 とを操作 して作成 されたステ レオ グラムの原理.左右 ステ レオペ アの鋏状 要 因 は同一 と す るが圧縮要 因 は異 なる もの (AB,CD),鋏状 要 因 は 異 な るが 圧 縮 要 因 は 同 一 と した もの (AC,BD)
(Bradshaw,M.F.,Hibbard,P.B.&Gillaln,B。 2002)。
時は圧縮要因が異なるステ レオグラムのそれよ りも小 さいことが示 された。この結果か ら,鋏
状要因にもとづ く立体視が圧縮要因のそれより も速 く処理 されることは,出現 させる面の傾 き (inchnatiOn,slant)の 軸 を常 に固定 (̀5° ,‑45°)
してあるので面の方向 とは無関係 に生 じている といえる。また,潜時は ドットで構成 された枠 組 (視差ゼロ)をランダム ドッ トの周囲に提示 すると顕者 に減 じることも示 された.これ らの ことか ら,鋏状視差 と圧縮視差は両眼立体視の ための基本要因であると考 えられる。
2.12.ダ・ ヴ ィンチの提 案 した視 覚上 の拘 束 問題
ダ・ヴィンチは絵画制作上の観点か ら,人間 の網膜 に投影 されているものを忠実にキャンバ スに再現することはで きない事態が2つあるこ とを指摘 した。その1は,2つの対象が画家の 頭部に関 して全 く同一の方向にあ り, したがつ て重なって存在する事態であ り,その2は,対
象の背後にある面の一部は一眼に見 えているが,
一D
﹂国喜∽ ・日8彙斎鎖¨∩
他眼か らは隠蔽 されている事態である (図10)。
ダ・ヴインチは,これ らの問題 を観察者の眼球 と対象 との間の光学的関係の視点から提起 した。
これ らの問題は,両眼か ら光景 を観察 した場合,
両眼で見 えている光景 を正確 にはキャンバス上 には再現で きないこと,したがって正 しく再現 するためにはある静止点 を設定 し,その位置か ら見える光景 を再現 しなければならないことか ら,キャンバスに描かれた奥行 と実際の光景で の奥行 とは一致 しないことを意味 した。OnO,et J.。の は,ダ・ヴィンチの2つの問題事態 を考 察 し,眼球 と対象 との間の幾何光学的分析の他 に,両眼融合視 されたキクロピアンの視点か ら の分析が必要であることを指摘 し,この考察 を 支持 す る実験 的例 証 を幾 つ か提 示 してい る
(PercepdOn Websiteで 体験可能)。
2.13.フ ク ロ ウの ブル ス ト (全 頭 膨 大 部visua:Wu:st)ニ ュー ロンの ランダム・ ドッ ト・ ステ レオグラ ムに対する応答特性
無麻酔下のフクロウ (barn Owl)の 視覚領 (visud Wulst)のニューロンの垂直視差に対する .応答特性が,Nieder&Wagner(0に よってしら べ られた。垂直視差は,図11に示されているよ うに,各眼の結節点が片眼側の視野にある対象
(点P)と,このPから垂線 を凝視点 を通る前 額平行面の水平線上に下ろ した点 との間になす 角度 (α,β)をさす。ランダム・ ドット・ステ レオグラムを提示 した時の微小電極 を通 しての ニ ュー ロ ンの反応傾 向 を見 る と,調査 した ニューロンの約半数は垂直視差に応答すること,
また垂直視差 に応答する一個のニューロンの視 差変化 に伴 う応答頻度は水平視差 と同様 に周期 的に変化 し,ガボール関数で良 く記述で きるこ とが示 された。さらに,水平視差 に垂直視差 を 付加 した条件でニューロンの応答 をしらべると,
ほとんどすべてのニューロンが両方向の視差 に 応答することが示 された。このように,垂直視 差 に対する応答は,水平視差 に対する応答が中
図 10
ダ 。ヴインチの提起 した絵画制作上の問題。(A)は, 2つ の対象が画家の頭部に関 して全 く同一の方向にあ り,したがって重なって存在する事態であ り,(B)は,
対象の面の一部 は一限に見えているが,他 眼からは隠 蔽 されている事態である (OnO,H。 ,ct」 ..2002)
図11
垂直視差 (Nieder,A.&Wagner,H.2001)。
断 されたためで はな く,そ の方向特性が変化 し,
その結果 として これ までその存在が確認 されて いた視差検 出器が応答 したため と考 え られ る。
2.14.両眼立 体視 に対 応 す る人 間の脳 部 位
両眼立体視を担 うニューロンはvl領域で確認 されているが,その詳細な しくみは不明である。
そこで,機能的磁気共鳴画像法 (皿)を用い て,両眼立体視中のVlとそれ以降の脳領域の機 能的変化が,Backus et」。② によって しらべ ら れた。MRIは脳の組織内に豊富 にある水の水素 核の磁気共鳴吸収 を基にし,その吸収特性が水 の置かれた環境 によって変わることを利用 して 灰色質,自色質等の画像 にコン トラス トをつけ て表示する装置である。脳が機能活動 を行 うと