1.はじめに
高齢化社会の到来とともに歩行障害を有する患者が増 加しており,リハビリテーションの重要性が高まってき ている.リハビリテーションの研究を進める上で,また 医療の現場において理学療法士が患者を指導する場合に, 歩行中あるいはその他の運動中の下肢の関節モーメント を把握することは,非常に有用である.また,スポーツ のトレーニングなどにおいても関節モーメントは重要な 情報であると位置づけられている. 現状では,関節モーメントの算出は床反力計と3次元動作 解析装置(高速カメラシステム)を用いて得られたデー タに逆動力学を適用し関節モーメントを算出する方法が 広く用いられているが,これらの装置は据え置き型(以 下では設置型)であるため使用場所や歩数に制限がある. 歩数を確保するために複数の床反力計を設置する場合も あるが,その場合には大規模なシステムとなり高価にな るとともに広いスペースが必要となる.また,多数並べ た床反力計の上を,片足ずつ乗せて計測する必要がある ことから,自然な歩行が行いにくいという問題がある. 前述の問題を解決するにためは床反力計,3次元動作解 析装置をウエアラブルなものに置き換えることが考えら れる.動作解析については,3軸のジャイロセンサ,加速 度計,地磁気センサの出力に信号処理を加えたウエアラ ブルなモーションセンサとして市販されているのもあり, それらを応用していくことが考えられる.しかし,ウエ アラブルな床反力計については実用化されているものは なく,関連した装置では履物のなかに挿入して圧力分布 を計測するシステムが市販されている.これらは定性的 な圧力分布の評価には適しているものの出力の時間変化 や定量的な精度が十分でないなどの問題があるため,床 反力としての精度を確保することが困難であり,また上 下方向の力しか計測できない. そこで,著者らの研究グループでは,履物と一体化し たウエアラブルな床反力センサに関する研究を進めてい る.精度と履き心地を両立させるため,床反力センサシ ステムのキーパーツとして超薄型・超軽量型で姿勢セン サも内蔵した6軸の移動式フォースプレート(M3D-FP) を製作した1).2個のM3D-FPを一組として履物の柔軟さ が確保できる場所に取り付け,履き心地がよいことと高 精度であることが両立可能なウエアラブルな6軸床反力セ ンサシステムを開発している.実験により提案したシス テムと設置式の床反力による計測値を比較検討した結果, 両者はよく一致するとともに,良好な履き心地も確保す ることができた2). 既に述べたように,リハビリテーションの研究を進め る上で,また医療の現場において理学療法士が患者を指 導する場合に,歩行中あるいはその他の運動中の足底に 発生する力は,非常に有用な情報となる.また,スポー ツのトレーニングなどにおいても,シューズと地面との 間に発生する力は重要な情報であると位置づけられてい る.このように,足底に発生する力を計測することは, 歩行姿勢の研究や靴のデザイン,スポーツバイオメカニ クス,障害防止に重要であるため,様々な足底センサ, 足底圧力計測システムが提案され,商品化されている. そこで,本稿ではまず,現在までに研究報告や足底圧 力計測システムとして市販されているものを機能ごとに 分類し,その特徴について述べる.次に,著者らが開発 した「ウエアラブルな移動式床反力計」について少し詳 細にその構造と計測原理について述べる.さらに,先端 < General remarks > Special Issues No.3:Measurement Technique for Ergonomics, Section 1-3:“Measurement of Body Motion” −Motion Measurement by using Force Censor−, by Nobutaka TSUJIUCHI & Akihito ITO.特集③:人間工学のための計測手法
第1部:動作計測(3)−力覚センサによる動作計測−
*辻内伸好
**,伊藤彰人
** ■総 説■ *受付:2014年8月22日 受理:2014年10月9日 **同志社大学理工学部的な多軸力覚センサの応用事例として,一般の運動計測 とは異なるが,義足装着者の歩行解析,アラインメント の調整のための情報などを計測するために開発した,義 足内蔵型6軸センサや,片麻痺患者の歩行リハビリテー ションに有効と考えられる,床反力計を内蔵したスプ リット型トレッドミル,指の押し圧力を計測可能な指用 力覚センサなどについても触れる.
2.足底圧力計測装置の分類
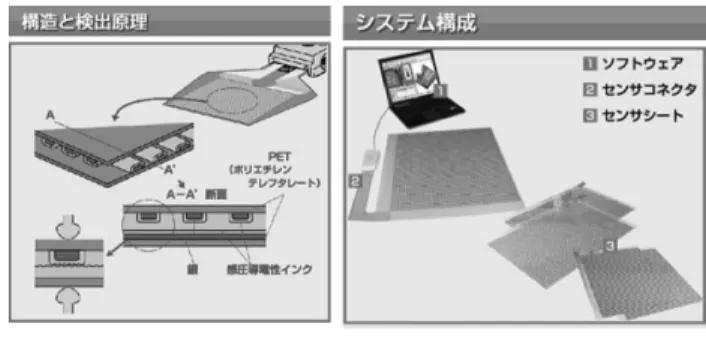
本節ではまず,現在までに研究報告および商品化され ている足底圧力計測装置について,機能面から分類しそ の特徴について述べる. 足底の圧力を計測する装置は大きく2種類に分けられ る.センサ自身を床に設置し計測する「設置型計測装置」 と靴など履物自身がセンサで構成され,被測定者の足に 直接装着する「身体装着型計測装置」である.設置型, 身体装着型は,それぞれ足底面の圧力分布を測定する 「足底圧力分布計測型」と足底に作用する床からの反力を 計測する「床反力計測型」に分類される.さらに,使用 されるセンサの種類や計測法,機能に応じて細分化され る.図1に足底圧力計測装置の分類について示す. 以下,主な計測装置の特徴について述べる. 2-1.設置型計測装置 2-1-1.足底圧力分布計測型 歩行中の足部に作用する圧力分布を測定する設置型装 置は,マット型の歩行解析装置が主流で,薄いセンサユ ニットを床面に設置して計測することが特徴である.そ のため,計測器を設置するための工事が不要で,また足 や靴に設置する計測器も不要のため,歩容に与える影響 が少なく,物理的,心理的制約も受けにくい利点がある. マット型の歩行解析装置は,センシング可能部分が最大 4 mで,歩行距離が限定されるが数歩程度は測定可能で ある.マット型歩行解析装置は既に数社から数種類販売 されており,ここでは代表的なものを以下に示す. 【走査型】 大面積用圧力分布計測システム(BIG-MAT,HUGE-MAT)(ニッタ㈱)3)やFDM3(Zebris社)4)などがある. HUGE-MATは,感圧導電性インクを使用したシート状 のセンサで,日本では最も普及しているマット型の足底 圧計測システムである(図2).このセンサシートはタク タイルセンサシステムと呼ばれ,2枚のフィルムに行,列 の銀電極を配線し,その電極の交点が計測点になり,圧 力が作用すると電気抵抗値が変化する.電気抵抗値が 8 bitのディジタル値に変換されパソコンに取り込まれる. 最大884 mm×1156 mmの圧力分布が計測可能で,計測 点が最大8448点の高密度な圧力分布が測定でき,サンプ リング周波数は最大100 Hzである. FDM3は,圧力検出にコンデンサーを用いて静電容量 を検出する方法を用いたキャパシタ方式の圧力計測シス テムである(図3).キャパシタ方式ではセンサ部に圧力 が作用すると,静電容量が変化し,この容量変化を記録 走査型 写像型 歪みゲージ方式 水晶圧電素子方式 インク着色型 走査型 センサ分布型 足底圧力 分布計測型 床反力計測型 足底圧力 分布計測型 (インソールタイプ) 床反力計測型 (靴底取り付けタイプ) 設置型 身体 装着型 足底圧力 計測装置 図1 足底圧計測装置の分類Fig. 1 Plantar pressure measurement equipment classification.
図2
大面積用圧力分布計測システム(BIG-MAT,HUGE-MAT(ニッタ㈱)http://www.nitta.co.jp/?post_type= sensor&p=7432&fnkey=product
Fig. 2 Plantar pressure distribution plate by scanning type
(BIG-MAT, HUGE-MAT(Nitta Corporation)).
図3 大 面 積 用 圧 力 分 布 計 測 シ ス テ ム ( F D M 3 ( Z e b r i s
Medical GmbH))http://www.zebris.de/english/extranet/ downloads/webgalerie/webgalerie_produkte/bildergalerie _fdm_e.php?navid=24
Fig. 3 Plantar pressure distribution plate by scanning type
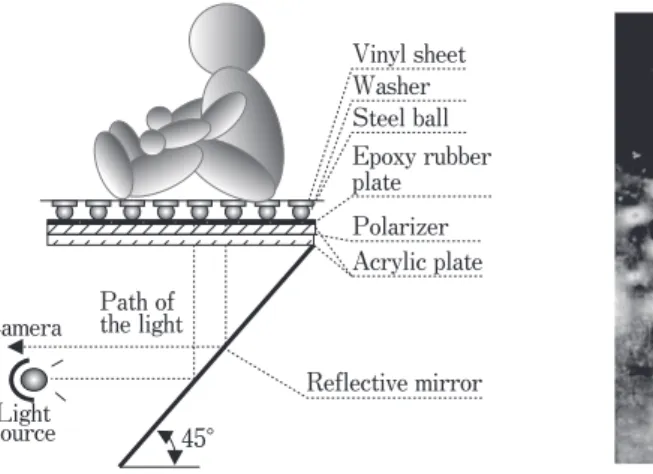
しコンピューター上に圧力変化として送信する.長さは 1.5∼3.0 mまで用意されており,3.0 mのサンプリング周 波数は 60∼ 120 Hzである.同様のシステムに,PX100 (Xsensor Technology社)などがある. 【写像型】 図4左図は,中川らが,台上に敷き詰めた光弾性材料 (高分子ポリマー)の複屈折現象を利用して座面部接触圧 力分布を可視化するために開発したものである5).この手 法の基本原理はM. Arcanら(1976年)により提案され6), 中川らはこの装置の臨床への応用と得られたデータの臨 床的意義についてこれまで検討を行ってきた7).装置は主 として,偏光板を縦1000 mm×横600 mmで厚さ6 mmの アクリル板でサンドイッチにした台上に,表面に反射塗 料を塗ったエポキシラバ平板を重ね,その上に鋼球を等 ピッチ碁盤目状に配列し,さらに透明なビニールシート を重ね接着固定した受圧部と,傾斜角45°の反射鏡を通し て白色光をエポキシラバ板内部に透過する光学系で構成 されている. 被験児の体表面がビニールシートに接し鋼球を介してエ ポキシラバ板に外力を加えると,エポキシラバ板内部に応 力が発生し,ここに偏光を透過させると複屈折効果により 円形状の等色線縞が出現する(図4右図).本手法は,接 触部に働く力の方向と大きさを同時に計測することができ る.しかし,個人によって接地面積や体重が異なるためエ ポキシラバの光弾性感度,板厚,円孔の直径,鋼球の直径 を測定の対象と目的に応じて変更する必要がある. 2-1-2.床反力計測型 歩行中に床から足部にどのような力が加わっているか を計測するためには,床反力計(Force Plate, Force
Platform)が一般的に用いられる.市販されている床反 力計はセンサや形状の違いから数多くの種類があり特性 も様々である.床反力計には歪みゲージを用いる方法と 水晶圧電素子のセンサを用いる方法がある.前者はAMTI 社,㈱テック技販など複数社から(図5(a))8),後者は Kistler社から(図5(b))9)市販されている. 一般的な形状は四角形であるが40×60cmの小さなもの から長さが2 mを超えるものまで大きさは様々である.床 反力計が大きければ計測時に歩幅を拘束しないため被測 定者への心理的負担が軽減されるが,固有振動数,作用 点の推定精度がいずれも低下する.床反力計の構造は平 板の4隅に,3軸の力センサ(荷重計)を取り付けたもの である.平板の剛性が低いと固有振動数が低くなるため, 安定して計測が行えない.固有振動数は支柱となる力セ ンサの材質や形状,床反力計自体のプレートの剛性と重 さに影響されるため,大型で重い床反力計になるほど固 有振動数は低下する.最近では,固有振動数を向上する ため,アルミハニカム構造を採用したものも開発されて いる.固有振動数は力センサの種類に依存し,歪みゲー
Photoelastic apparatus for measuring the pressure points when seated
Photoelastic fringe image on the contact plane Path of the light 45° Vinyl sheet Washer Steel ball Epoxy rubber plate Reflective mirror Polarizer Acrylic plate Camera Light source 図4 高分子ポリマーの複屈折現象を利用した圧力分布計測装置の原理と偏光の複屈折効果により出現した等色線縞の例(豊橋 創造大学紀要, No.15, 67-76, 2011)
Fig. 4 Photoelastic apparatus for measuring the pressure points when seated and photoelastic fringe image on the contact plane.
図5 (a)歪みゲージを用いた床反力計(㈱テック技販)
http://www.tecgihan.co.jp/p5/p5_1.htm,(b)水晶圧電素
子を用いた床反力計(日本キスラー㈱)http://www.kistler.
co.jp/pro/index/005_main.html
Fig. 5 (a)Force plate by using strain gauge,(b)Force
ジ式の力センサでは100 Hz程度,水晶圧電素子式のもの では400 Hz程度である.通常の歩行では,0∼50 Hzの測 定周波数帯域が要求され,普通の歪ゲージ式で十分であ る.しかし,硬い踵の靴を履いた義足歩行の計測,走行 などの速い動作の計測などでは,高い測定周波数を必要 とするため,水晶圧電素子式の力センサを用いるのが好 ましいとされる. 床反力計の計測では,片足ごとの床反力を測定できる ことが望ましい.特に,関節モーメントの計算において はこれが必須条件となる.そのため,片足ごとの床反力 を測定するために床反力計の配置には2つの方法がある. 1つは,数十cm四方の床反力計を進行方向に沿って直列に 並べる方法である.この場合,被測定者は左右の足で各 床反力計を次々に踏んでいくことが要求される.これは, 被測定者が意識して各床反力計を踏む必要があるため, 被測定者へ心理的影響を与える.また,歩幅にも物理的 な制約を加えることになる.2つ目の方法は,長尺の床反 力計を進行方向に対し並列に並べる方法である.この場 合,被測定者の歩幅に対する制約はなくなるが,左右の 足で左右の床反力計を踏み分けることが要求されるため, 歩隔に物理的な制約を加えることになる.また,床反力 計の踏み分けは心理的制約を加えることになりかねない. 2-2.身体装着型計測装置 身体装着型計測装置は,靴の中に入れるインソール型 センサが一般的である.設置型の計測装置と同じく,歩行 中に足部の圧力を計測する装置と床反力を計測する装置の 2種類に分けられる.前者には,設置型で既に説明した感圧 導電性インクなどを使用したシート状のセンサを用いた 圧力分布測定の計測装置,後者には,設置型床反力計を 厚さ13 mm,95 mm角,重量200 gに小型化し,床反力計 と同じ原理で靴裏に取り付け可能とした移動式床反力計が ある.移動式床反力計を足の前足部と踵部の2つ用いるこ とにより,足関節モーメントを求めることも可能である. 2-2-1.足底圧力分布計測型 身体装着型計測装置で足底圧力分布を計測する機器は, インソール型センサが一般的で,現在までに複数の製品 が販売されている.インソール型の足底圧力分布計測装 置は,センサの種類により3種類に分類できる.まず,イ ンクで着色し発色の度合いで足底圧力を計測するプレス ケール,電極を行と列で格子状を作りその交点の抵抗値 から計測する走査型の計測器,最後にインソール内に小 型のセンサを分布した分布型の計測器に分類される. 【インク着色型】 プレスケールは,富士フイルム㈱から販売されている, 圧力特性が測定可能な極薄発色層均一塗布フィルムであ る10). 支持体が紙のAシートとポリエステルフィルムのCシー トから構成されている.Aシートのマイクロカプセルには 無色染料が封入されており,圧力がかかるとこのマイク ロカプセルが破壊されCシートに塗布された顕色剤と化 学反応が起こり赤く発色する.加圧力の大きさに対応し, 一定の強度以下のマイクロカプセル群が破壊される.一 定の圧力で破壊されるマイクロカプセル内の無色染料を 一定にすることで,発色する色濃度が供給される無色染 料の量に比例するため,色濃度から圧力の大きさが算出 できる(図6). 紙とポリエステルフィルムからできているため,鋏な どで被測定者の足の形や大きさに合わせ自由にトリミン グが可能である.しかし,材質が紙や染料などを用いて いるため紫外線や油,水に弱い欠点があり,1度しか使用 できない. 【走査型】 足圧分布測定システムF-スキャンⅡ(ニッタ㈱)11)は, 設置型で既に述べた感圧導電性インクを用いたシート状 のセンサで,日本で最も普及しているインソール型足底 圧力計測センサである.厚さ約0.15 mmの超薄型のセン サシートで靴内に容易に装着可能で,最大955点の計測点 で高密度な圧力分布測定が可能である.サンプリング周 波数は最大で750 Hzとなっている(図7).キャリブレー 力 力 支持体 :Aフィルム (PETベース) 支持体 :Cフィルム (PETベース) 発色剤層 顕色剤層 支持体(PETベース) 発色剤層 顕色剤層 図6 インク着色式プレスケール(富士フイルム㈱)http:// fujifilm.jp/business/material/prescale/prescalefilm/featur e.html
ションはセンサシートを装着し,靴を履いた被測定者の 自重により片足ずつ実施し,計測毎に必ず行う必要があ る.データロガーシステムを利用し,足底分布圧をコー ドレスで計測することも可能である. 【センサ分布型】 センサ分布型の身体装着式の計測装置は,インソール 内部に圧力センサが部分ごとに配置されている.複数の 製品が販売されているが.センサの配置位置やセンサの 数は千差万別である.また,非拘束で計測が行える無線 式やデータロガー式の製品が多いのもこの種類の特徴で ある. medilogic insole(medilogic社)12)は,インソールの中 に最大240点のセンサを分布させた計測装置である.デー タの収集にはテレメトリーを採用しているため被測定者 に動作,心理的制約を与えずリアルタイムで計測が可能 である.体の重心軌跡(COP)や圧力中心を表示するこ とができる(図8). 2-2-2.床反力計測型 靴底に3軸力覚センサを組み合わせた床反力計に相当す る機械的な装置を,中足骨部分と踵部分に取り付け,片 足の床反力がこの2つのセンサのみに加わるようにして床 反力を計測する.汎用の3軸力センサを用いて製作された ものは,靴の重さが重く厚いため,歩容への影響が懸念 される. Xsens社(ForceShoe)は,自社のモーショントラッカー と3自由度の力センサを靴底に取り付けた床反力計を,オ ランダのUniversity of TWENTEのP. H. Veltik等と共同開 発している(図9)13,14).計測されたデータは,ForceShoe からリアルタイムでXsens社専用ソフトウェアに無線で 送信され,3軸反力とトルクを用いて足部の3次元運動を 測定し,装着者の運動を拘束することなしに歩容を計測 することが可能である.靴底に取り付けるセンサモジュー ルの高さが32 mm,重量が片足分で1100 gあるため,歩 容への影響が懸念される. M3D-FP(移動式フォースプレート)(㈱テック技販)は, 設置型床反力計を厚さ13 mm,爪先95 mm角,踵80 mm角, 重量が片足分350 gに小型化し,床反力計と同じ原理で靴 裏に取り付け可能とした移動式床反力計である(図10)2). 専用のサンダルを使用した場合,普通の靴の厚みと同程 度であり,爪先部分と踵部分を分離しているため,歩行 の際にも違和感のないことが報告されている.フォース センサシート システム内容 図7 走査型足底圧分布圧測定システム F-スキャンⅡ(ニッ タ㈱)http://www.nitta.co.jp/?post_type=sensor&p=7425 &fnkey=product
Fig. 7 F-scan II insole type foot pressure measurement system(Nitta Corporation).
図8 センサ分布型分布圧測定システム medilogic insole (medilogic
GmbH)http://www.medilogic.com/produkte-mensch/fussdruckmessung/medilogic-sohle/
Fig. 8 Medilogic insole type foot pressure measurement system(medilogic GmbH).
図9 靴底装着型床反力センサUniversity of TWENTE13) Fig. 9 Experimental instrumented shoe with 6 degrees of
freedom force and moment sensors under heel and forefoot coupled to inertial movement sensors
(University of TWENTE).
図10 靴底装着型の移動式床反力計M3D-FP(㈱テック技販)
http://www.tecgihan.co.jp/p7.htm
プレート内部に慣性センサ(加速度,ジャイロ,地磁気 センサ)を内蔵し,鉛直方向力,剪断方向力,3軸回りの モーメントの同時計測が可能である.計測データは,時 系列のCSVファイルで保存されるため,ユーザが自由な 解析を行うことができる.無線トリガユニットと組み合 わせることで,外部機器と同時スタートする,トリガ計 測も可能である. 本装置は,㈱テック技販が著者らと共同で開発したも ので,その構造や性能に関して次章で少し詳しく述べる. 以上のように,本節では現在までに研究報告および市 販されている計測装置をセンサの種類,計測目的ごとに 分類し,計測装置の種類ごとに特徴を述べた.足裏に 作用する圧力の計測装置は,その計測目的,方法が様々 であり多岐にわたる.いずれの計測装置にも長所,短所 があり,ユーザは計測装置の特徴を理解し,計測目的に 沿って機器を使い分ける必要がある.
3.ウエアラブルな床反力センサ
2) 3-1.M3Dシステムの構成 著者らは,「M3Dシステム」と呼ばれるウエアラブル な歩行解析システムを開発した(図11)15).M3Dシステ ムは小型の移動式床反力計や加速度センサ,ジャイロセ ンサおよび地磁気センサからなるモーションセンサによ って構成されている.床反力計やモーションセンサに内 蔵されている各種センサの諸元について表1に示す.さら に,システムを構成するコンポーネントの諸元について 表2に示す.M3Dシステムは,設置式の三次元動作解析 装置と比較すれば安価であり,制約条件も少ない.歩行 実験においては移動式床反力計やモーションセンサから の出力を用いて計算することで床反力,圧力中心の軌跡 および下肢の姿勢を算出することが可能である.M3Dシ ステムの妥当性を検証するために,歩行運動を含む複数 の運動を対象として計測を実施している.歩行運動の計 測の際には,比較のためにM3Dシステムと同時に既存の 三次元動作解析装置を用いて,同等の性能を有している ことが確認されている. ここでは,M3Dシステムの内,4つの移動式床反力計 (M3D-FP)についてその特徴を述べる. M3D-FPの内部には,図12に示すように4個の3軸力覚 センサが内蔵されている.歩行に際し,センサの床面と M3D-DT データトランスファ M3D-MS モーションセンサ M3D-FP-R 移動式 フォースプレート 図11 M3D歩行解析システム(㈱テック技販)http://www. tecgihan.co.jp/p7/p7_3.htmFig. 11 Constitution of M3D system( Teck-Gihan Corporation). Nonlinearity ±1[%RO] ±1[%FS] ±1[%FS] ±0.1[%FS] Responsive ±2[kHz] ±500[Hz] ±140[Hz] ±10[kHz] Rated Value XY:±250[N], Z:+500[N] ±19.6[m/s2] ±1200[deg/s] ±70000[nT] Sensor Force Acceleration Gyro Geomagnetism 表1 センサの仕様
Tab. 1 Specification of sensors.
Component M3D-FP M3D-MS M3D-DT Rated Value Fx, Fy:±500[N] Fz:±1000[N] Mx, My:±15[N・m] Mz:±30[N・m] Weight 135[g] 16.5[g] 565[g] Height 6[mm] 10.5[mm] 40[mm] Depth 82[mm] 50[mm] 100[mm] Width 88[mm] 35[mm] 145[mm] 表2 移動式床反力計M3Dの仕様 Tab. 2 Specification of M3D components.
図12 靴底装着型の移動式床反力計M3D-FPの内部構造 Fig. 12 Inside construction of M3D mobile force plate.
の接触による衝撃荷重が発生しないように四隅を面取り するため,3軸力覚センサは,床反力計の座標に対し45度 傾けて取り付けられている.M3D-FPは専用シューズの 底面に両面テープを用いて取り付ける.なお,片足につ き2枚のM3D-FPを一組として用いる.さらに,M3D-FP には加速度センサ,ジャイロセンサおよび地磁気センサ も内蔵されているので,足部の運動学データを計測する ことが可能である. 3-2.座標系の定義 今後,左上への添え字として書かれる「S」はフォース プレートのセンサ座標系を意味し,同様の「G」は固定 座標系を意味する.また,どちらの座標系も右手座標系 であり,各軸に関して時計回りを正の方向とする.ここ で,M3D-FPのセンサ座標系(SX,SYおよびSZ)を図13 のように定義した.さらに,片足につきM3D-FPを爪先 側,踵側に装着し計測を行うため,図14に示すように, 片足全体のセンサ座標系の原点は踵側のM3D-FPのセン サ座標系の原点と同一であると定義した. M3D-FPにおけるセンサ座標系S X,S Y,S Zを図13に示 すように定義すると,センサ座標系各軸方向にかかる床 反力S F(=[SFX SFY SFZ]T ):[N]は3軸力覚センサ出力 Fxj,Fyj,Fzj,(j=1,2,3,4):[N]を用いて次式で算 出することが可能である. (1) また,M3D-FPが地面より受ける3軸まわりのモーメント SM(=[SMX SMY SMZ]T ):[N・m]は3軸力覚センサ出力 より次式のように推定することができる. (2) ここで,rは原点と3軸力覚センサ中心の距離である.以上 より求めた床反力およびモーメントから,センサ座標系に おける圧力中心座標:SCop(=[SCopX SCopY SCopZ]T
): [m]は次式で算出することが可能である. (3) 図14のように,通常M3D-FPは片足に2枚ずつ使用する. つま先側の M3D-FP出力を添字の Toe,踵側の M3D-FP 出力を添字のHeelで表す.図14のように,片足全体のセ ンサ座標系の原点は踵側M3D-FPのセンサ座標系の原点 と同一であると定義する時,片足全体における床反力 S_TotalF,モーメントS_TotalMおよび圧力中心S_TotalCopは次式 のように定義される. (4) (5) (6) ここで,d:[m]は2枚のM3D-FPの中心間距離である. S_Total S_Total S_Total S_Total S_Total MY FZ MX FZ Cop= − 0 S_Total S_Total S_Total S_Total S Toe S Heel S Toe S Toe S Heel S
Toe S Heel S Toe
MX MY MZ MX MX FZ d MY MY MZ MZ FX d M= = + + ⋅ + + + ⋅ S_Total S_Total S_Total S_Total S Toe S Heel S Toe S Heel S Toe S Heel FX FY FZ FX FX FY FY FZ FZ F= = + + + S S S S S S S S CopX CopY CopZ MY FZ MX FZ Cop= = − 0 S S S S MX MY MZ Fz1 Fz 2 Fz 3 Fz 4 2 2 r Fz1 Fz 2 Fz 3 Fx 4 2 2 r Fx1 Fx 2 Fx 3 Fx 4 r M= = − − + +
(
)
⋅ ⋅ − − +(
)
⋅ ⋅ + + +(
)
⋅ S S S S FX FY FZFx1 Fx2 Fx3 Fx4 Fy1 Fy2 Fy3 Fy4 2 2 Fx1 Fx2 Fx3 Fx4 Fy1 Fy2 Fy3 Fy4 2 2 Fz1 Fz 2 Fz 3 Fz 4 F= = + − − + − − +
(
)
⋅ − + + − + + − −(
)
⋅ + + + r 45° SX SY SZ SZ SY SX Fx4 Fy4 Fz4 Fy3 Fx3 Fz3 Fx1 Fy1 Fz1 Fy2 Fx2 Fz2 図13 M3D-FPのセンサ座標系Fig. 13 Sensor coordinate system of a M3D-FP.
S_HeelZ S_HeelY S_HeelX S_ToeZ S_ToeY S_ToeX d S_TotalZ S_TotalY S_TotalX 図14 片足全体のセンサ座標系の定義
3-3.下肢の姿勢 股関節,膝,踝,M3D-FP中心の位置座標をO(=[OX OYOZ]T),関節間ベクトルをL(=[LXLYLZ]T)とすると, M3Dシステムを装着した時の下肢モデルを図15に示す. この下肢モデルは下肢姿勢を算出するためのもので,以 下のような仮定に基づいている. まず,歩行中は必ず4枚のM3D-FPのいずれかで立脚し ていて,立脚点とみなすM3D-FPの中心座標は変化しな いとみなす.なお,実際には4枚のM3D-FPのうち最も大 きな床反力を計測しているM3D-FPを立脚点であるとみ なし,下肢モデルを計算する.また,関節間ベクトルL の大きさは変化せず,各センサが脚部に固定されている ので,LはS座標系とともに回転する.この時,固定座標 系に対する各センサ座標系の回転を求めることで,立脚 点から順に関節座標を算出することが可能である.この ようにして求めた各点を結ぶことによって,下肢姿勢を スティックピクチャの形で表示することができる. 3-4.計測結果 比較検証のために床反力の結果を固定座標系で表現す るので,M3D-FPによって計測された床反力データをセ ンサ座標系から固定座標系へ座標変換し,固定座標系で 表された床反力のうち右足についての結果を図16に示す. また,床反力と同様にして,M3Dシステムおよび既存の 三次元動作解析装置の双方の計測データを用いて算出し た圧力中心の結果を図17に示す.直線歩行の際にM3Dシ ステムにより得られたデータを用いて算出した下肢の軌 SX SY SZ GY GX GZ OLeft heel OLeft ankle OLeft knee OLeft hip OLeft toe ORight knee ORight hip ORight heel ORight toe ORight ankle Right hip Right knee L Left hip Right hip L Left ankle Left knee L Left toe Left heel L Left ankle Left heel L Left knee Left hip L Right knee Right ankle L Right toe Right heel L Right ankle Right heel L 図15 M3D-FPを装着した時の下肢モデル
Fig. 15 Lower leg model with M3D system.
700 600 500 400 300 200 100 0 −100 0 5 10 15 Time[s] Force [N] M3D-FP Rignt Toe +Heel Force Plate 図16 床反力計とM3D-FPの鉛直方向床反力計測結果の比較 Fig. 16 Ground reaction force: right foot.
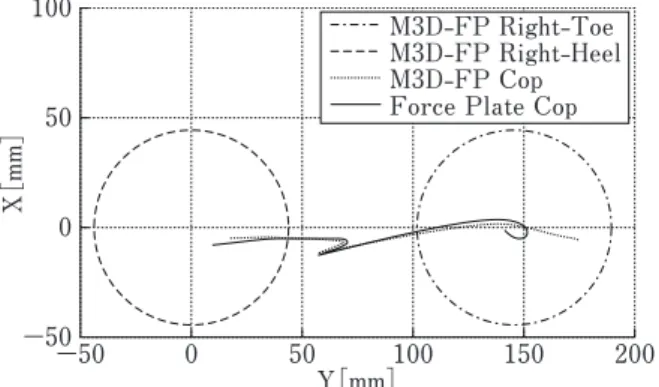
100 50 0 −50 −50 0 50 100 150 200 Y[mm] X[m m] M3D-FP Right-Toe M3D-FP Right-Heel M3D-FP Cop Force Plate Cop
図17 床反力計とM3D-FPの圧力中心計測結果の比較 Fig. 17 Center of pressure: right foot.
1000 800 600 400 200 0 1000 800 600 400 200 0 −200 −400 −600 −800−1000 X(mm) Z(m m) 図18 直線歩行時の下肢のスティックピクチャ
Fig. 18 Stick picture in walking straight.
図19 M3D用歩行分析システムの操作画面
跡を,図18にスティックピクチャの形で示す.図18より, M3Dシステムを用いると歩行中の下肢の姿勢を計測可能 であることがわかる. また,計測したデータを基に歩行分析が可能な,専用 ソフトウェアも開発している.その操作画面の一例を図 19に示す.
4.多軸力覚センサの応用事例
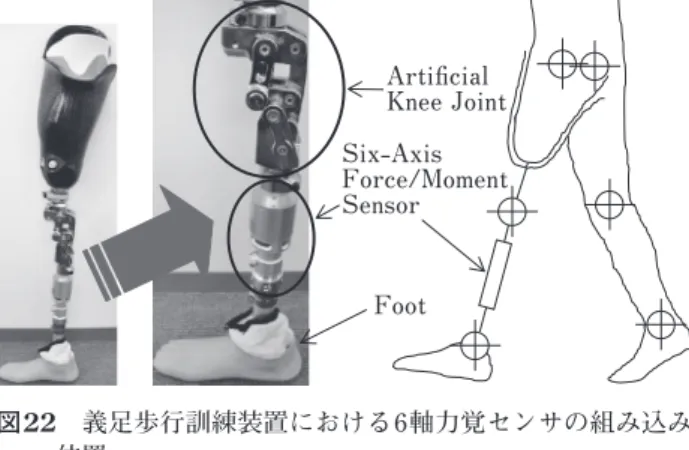
16) 4-1.義足内蔵型6軸力覚センサ 日本における下肢切断者は約六万人で,その約半数が 日常生活で何らかの義足を使用している.中でも,二万 人以上を占めるといわれている図20に示すような大腿切 断者は膝関節の機能を失っており大腿義足を装着する. リハビリテーション時には,平行棒を用いた義足歩行訓 練における義足への体重負荷および移動方法,健側と義 足側のバランスなどに関する指示の理解が困難であり, 平行棒外での歩行訓練に移行できない例が多い.そこで, 大腿義足に生じる床反力や下肢関節モーメントなどの負 荷荷重を計測することにより,義足への体重負荷方法な どを明確に指示できるシステムがあれば,義足歩行訓練 が促進され,短期間の訓練で一定の効果が得られると考 えられる. 義足の下腿部に装着可能な歩行機能計測システムとし てパイロンロードセルと呼ばれる6分力計が用いられてい るが,これらは歪みアンプなどの信号処理部が計測部と 分かれている上,PCと常時接続する必要があり歩行動作 の妨げとなる.従って,斜面,階段および不整地など幅 広い環境において下肢切断者が行う長時間連続した歩行 動作を計測できないという問題があった. そこで著者らは,ウエアラブルな義足歩行訓練装置とし て,計測部と信号処理部を一体化し,PCと接続せずさまざ まな環境において長時間連続した歩行動作を計測可能と する,義足内蔵型6軸力覚センサを開発した(図21(a)). これらのセンサは,起歪部である梁の側面に貼り付け たひずみゲージの電気抵抗変化から作用力と作用モーメ ントを計測する.6軸力覚センサは,信号処理部に最大サ ンプリング周波数10 kHzのデータロガーを内蔵し(図21 (b)),バッテリーやメモリーカードを使用して,図22に 示すような形で商用の歩行訓練用大腿義足に装着して使 用する.PCと接続することなく,最大350時間連続した 完全な無拘束状態での歩行計測が可能である.著者らは, この義足歩行訓練装置を大腿切断者に装着してもらい, 図20 大腿切断者Fig. 20 Trans-femoral amputee with a prosthetic limb.
Elongate Hole for Circuit Lead
Strain Gauge Screw Hole (b) 50 [m m] 30 [m m] 65[mm] 50[mm] 50[mm] Elastic
Body Data Logger
(a)
図21 (a)義足内蔵型6軸力覚センサ,(b)6軸力覚センサ の起歪部とデータロガ部
Fig. 21 (a)Prototype of a six-axis force/moment sensor,(b)
Placing surface of strain gauges and data logger.
Six-Axis Force/Moment Sensor Artificial Knee Joint Foot 図22 義足歩行訓練装置における6軸力覚センサの組み込み 位置
Fig. 22 Attachment position of a six-axis force/moment sensor.
平地,斜面,階段および不整地といった歩行路環境を設 定した自由な歩行速度における義足歩行計測実験を行い, 一般的な日常生活動作において大腿義足に生じる各荷重 パターンの生体力学的なメカニズムを明らかにしている. その時の様子と,計測されたデータの一例を図23に示す. 4-2.床反力計を内蔵したスプリット型トレッド ミル17) 歩行障害は,リハビリテーション医療で取り扱う頻度 の高い障害であり,日常生活動作を低下させる要因でも ある.リハビリテーションなどの臨床で行われている歩 行解析は,10 m歩行で要した時間を計測することによる 歩行速度とその歩数から計算される歩幅と歩行率,視診 による異常歩行パターンの類型化が一般的である.従っ て,据え置き型である複数のカメラによる動作解析装置 と設置型床反力計の出力から関節モーメントを推定する 市販の3次元動作分析装置,筋電図計,設置型床反力計 など歩行解析システムは,専有計測空間の制約,高コス ト,運動学習効率に対する評価指標欠如などの問題から, 臨床に応用されていない.これらの問題を解決する方法 として,低歩行能力者に対する長時間にわたる歩行解析 に対しては,トレッドミル歩行が有効と考えられている. 一方,大腿義足装着者の歩行訓練に関しては,その特 徴である左右非対称性を緩和し,患側に十分に荷重を負 荷する訓練が行われている.左右非対称性を緩和するた めのリハビリとして,左右分離型のトレッドミルの速度 差を利用するものがある.しかし,トレッドミルを患者 の歩容に合わせて効果的に制御する手法は確立されてい 0 600 1000 −200 800 400 200 0 10 20 30 40 50 60 70 80 90 100 Gait Cycle[%]
Stance Phase SwingPhase
Ground Reaction Force
[N]
Trans-femoral amputee in walking downstairs 0 600 1000 −200 800 400 200 0 10 20 30 40 50 60 70 80 90 100 Gait Cycle[%]
Stance Phase Swing Phase
Ground Reaction Force
[N]
Healthy subject in walking downstairs
0 600 1000 −200 800 400 200 0 10 20 30 40 50 60 70 80 90 100 Gait Cycle[%]
Stance Phase SwingPhase
Ground Reaction Force
[N]
Trans-femoral amputee in walking upstairs 0 600 1000 −200 800 400 200 0 10 20 30 40 50 60 70 80 90 100 Gait Cycle[%]
Stance Phase Swing Phase
Ground Reaction Force
[N]
Healthy subject in walking upstairs
図23 大腿切断者の階段上昇,下降時の膝反力の計測結果(健常者との比較)
ない.そこで,外部環境に制約を受けない自然な状態に おけるヒトの運動解析に基づく歩行評価指標を獲得し, 評価指標に基づき左右分離型トレッドミルの走行速度を 効果的に制御することにより,リハビリ効率の飛躍的な 向上が可能である.また,歩行指標と実際の歩行との相 違点を患者や理学療法士に視覚的に提示することにより, 患者のバイオフィードバックを促進し,運動学習効果を 反映した歩行訓練手法が構築できると考えられる. そこで,著者らは左右分離した歩行路に個別に埋設し た床反力計を利用し,障害者の歩容,歩行速度に合わせ て,左右の歩行路が個別に速度制御可能なトレッドミル を開発した.停止状態から定常歩行までの任意の歩容に 対して,非侵襲による歩行路ベルトの速度制御を実現し ている.このために,各床反力計の鉛直方向荷重から足 底圧中心点のそれぞれの位置情報を推定し,足先の運動 パターンからリアルタイムで歩幅,立脚時間,遊脚時間 を同定し,歩行速度を推定する.そして推定した位置情 報と歩行速度情報を基に,任意の歩容に完全に追従する トレッドミルのベルト速度制御が実行される.また,左 右の歩行周期,各方向の床反力などの歩行情報とともに 都会の中を歩いて行くような環境をコンピュータグラ フィクスによるバーチャルリアリティを利用して視覚的 に提示する大型スクリーンを備えた,3次元トレッドミル 歩行解析システムを開発した(図24). 本システムに埋設される床反力計は,1260 mmH, 400 mmL,248 mmDと一般的に用いられる床反力計に比 べて著しく縦長であるため,最低次の固有振動数の向上 が重要となる.そのため,コアの厚みが非常に大きいア ルミハニカムパネルを用いた床反力計を設計し,1次固有 振動数を180Hzに向上することが可能となった.剛性が 高いハニカム構造であるため,四隅に設置された歪み式 の3軸力センサの組み立てには高度なノウハウが必要であ る.埋設された床反力計を図25に示す. 4-3.指先力計測用力センサ 人間の行動に対するセンシング技術が進歩する一方, カメラなどでは計測が難しい,例えば,指が印加する接触 力の大きさを検出するための指先力の検出が可能なセン サが開発されている.指の接触面を覆わないウエアラブ ルな接触力センサは,医師が体得している手技の定量化 やスポーツトレーニング,人間工学の観点から操作性の 評価や接触動作の定量化など実用面から求められている. 図26は,カトーテック㈱,㈱テック技販,㈱資生堂の 図24 3次元トレッドミル歩行解析システム(トレッドミル, 投影画像)
Fig. 24 Human gait analysis system using sprit type treadmill and 3D virtual animation movie.
1260 mm
400 mm
248 mm
図25 トレッドミル用フォースプレート Fig. 25 6D force plate for sprit type treadmill.
図26 ウエアラブルの接触力センサシステムHaplog(カトー テック㈱,㈱テック技販,㈱資生堂)http://www.
tecgihan.co.jp/p2.htm
共同研究により開発された,ウエアラブルの接触力セン サシステムHaplog(Haptic Skill Logger)である18).この システムは指に装着し,指にかかる接触力を推定するの に必要な二対の歪みゲージを取り付けた指治具と,歪み ゲージからの電圧データを処理する装着型アンプ,なら びに,歪みゲージの計測データから指にかかる接触力を 推定するために必要なキャリブレーションシステム(3軸 力センサとコンピューター)から構成されている.また, 小型3軸加速度センサも取り付けられており,接触動作時 の特徴的な動作を検出可能である.このセンサシステム において,接触力を推定する方法は次の直感に基づく. 物体に触れる際に,接触力が指腹部に対して垂直に働く と,指先は水袋に似た性質を示すことから,指は水平方向 に変形する.この水平方向の指の変形を計測することで, 指の接触面で生じている接触力を推定する(図27参照). ここでは,関節リウマチ患者のリハビリの際に行われ るハンドセラピーにおいて,セラピストが与える力の大 きさや作用点の計測に適用した例を示す19).実験者(セ ラピストでない医師の指導を受けた者)が健常者を対象 に提案した計測法にてリハビリの模擬動作計測を行って いる.リハビリ時の指動作を計測するためにモーション キャプチャーシステムとHaplogを併用することにより, セラピストが発生する時々刻々変化する力の大きさと, その作用する方向を計測した.その結果を図28に示す.
5.おわりに
本稿では,「力覚センサによる動作計測」について,ま ず現在よく使用されている足底圧力計測システムを機能 ごとに分類し,その特徴について述べた.次に,運動計 測システムに利用可能なものとして最近着目されている, 著者らが開発した「ウエアラブルな移動式床反力計」に ついてその構造と計測原理について述べた.さらに,先 端的な多軸力覚センサの応用事例として,義足装着者の 歩行解析,アラインメントの調整のために開発した, 義足内蔵型6軸センサや,片麻痺患者の歩行リハビリテー ションに有効と考えられる,床反力計を内蔵したスプ リット型トレッドミル,指の押し圧力を計測可能な指用 力覚センサなどに触れた.本稿が,「身体動作の評価に関 する研究」の一助となれば幸いである. Finger fixture 指の変形 Force Horizontal Deformation 図27 Haplogの動作原理Fig. 27 Measurement principal of HapLog.
35 30 25 20 15 10 5 0 0 10 20 30 40 50
Force(no traction)(N)
Force ( traction )(N) (b)Relationships between two rehabilitations Traction No traction 35 30 25 20 15 10 5 0 0 20 40 60 Time(s) Force (N)
(a)Force of one subject
Rehabilitation with traction
40 20 0 -20 50 40 30 20 10 0 0 50 40 30 20 10 -10 -20 (m m) (mm) (mm) Push step 40 20 0 -20 50 40 30 20 10 0 0 50 40 30 20 10 -10 -20 (m m) (mm) (mm) Stop step Force vector
Point of action(Therapist) Bone
Joint axis Joint center Point of action(Bone)
Rehabilitation
(a)Stop (b)Traction
(c)Push (d)Return
図28 セラピストが発生する力の大きさと,その作用方向の時刻歴変化
参考文献
1) Liu T, Inoue Y, et al: A Mobile Force Plate System and Its Application to Quantitative Evaluation of Normal and Pathological Gait, 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics(AIM), 272-277, 2010.
2) 足立渡, 辻内伸好, 他:携帯型床反力計およびモーショ
ンセンサを用いた歩行解析システムの開発, 日本機械学会 論文集 C編, 78(789), 1607-1616, 2012.
3) ニッタ㈱:大面積用圧力分布測定システムBIG-MAT HUGE-MAT, Retrieved August 20, 2014, available from http://www.nitta.co.jp/?post_type=sensor&p=7432&fnkey= product
4) zebris Medical GmbH: Image Gallery - FDM System for stance and gait analysis, Retrieved August 20, 2014, available from http://www.zebris.de/english/extranet/ downloads/webgalerie/webgalerie_produkte/bildergalerie _fdm_e.php?navid=24
5) 中川博文, 藤田武久:光弾性法に基づく接触圧分布計
測装置の小児神経発達評価への応用, 豊橋創造大学紀要,
15, 67-76, 2011.
6) Arcan M, Brull MA: A fundamental characteristic of the human body and foot, J. Biomech, 9, 453-7, 1976.
7) 中川博文, 高橋賞:光弾性を用いた足圧分布測定法(第 1報), 日本機械学会論文集A編, 52(480), 2109-2116, 1986. 8) ㈱テック技販:フォースプレートTF-4060, Retrieved
August 20, 2014, available from http://www.tecgihan.co.jp/ p5/p5_1.htm
9) 日本キスラー㈱:フォースプレート, Retrieved August 20, 2014, available from http://www.kistler.co.jp/pro/
index/005_main.html
10) 富士フイルム㈱:プレスケール, Retrieved August 20, 2014, available from http://fujifilm.jp/business/material/ prescale/prescalefilm/feature.html
11) ニ ッ タ ㈱ : 足 圧 分 布 測 定 シ ス テ ム F-ス キ ャ ン II, Retrieved August 20, 2014, available from http://www.nitta. co.jp/?post_type=sensor&p=7425&fnkey=product 12) Medilogic GmbH: medilogic Sohle, Retrieved August 20,
2014, available from http://www.medilogic.com/produkte-mensch/fussdruckmessung/medilogic-sohle
13) Schepers HM, Koopman HF, et al: Ambulatory assessment of ankle and foot dynamics, IEEE Trans. Biomed. Eng., 54
(5), 895-902, 2007.
14) Veltink PH, Slycke P, et al: Three dimensional inertial sensing of foot movements for automatic tuning of a twochannel implantable drop-foot stimulator, Med. Eng. Phys., 25(1), 21-28, 2003.
15) ㈱テック技販: M3D 歩行解析システム, Retrieved August 20, 2014, available from http://www.tecgihan.co.jp/ p7/p7_3.htm
16) 林祐一郎, 辻内伸好, 他:無拘束歩行計測が可能な義足
用 6軸力覚センサの開発, 日本機械学会論文集 C編, 77 (781), 3427-3438, 2011.
17) Makino Y, Tsujiuchi N, et al: Quantitative Evaluation of Unrestrained Human Gait on Change in Warking Velocity, Proceedings of IEEE EMBS2014, Paper TB09.4, 2014. 18) 仲谷正史, 川副智行:触覚の感性評価ツール:ウェアラ ブル蝕動作センサHapLog, 日本ロボット学会誌, 30(5), 499-501, 2012. 19) 北野敬祐, 辻内伸好, 他:関節リウマチ母指MP関節亜 脱臼のリハビリ動作計測, 2014年度日本機械学会年次大 会講演論文集, 講演番号J2410202, 2014.


![Fig. 11 Constitution of M3D system( Teck-Gihan Corporation). Nonlinearity ±1[%RO]±1[%FS]±1[%FS] ±0.1[%FS] Responsive ±2[kHz] ±500[Hz]±140[Hz]±10[kHz]Rated ValueXY:±250[N],Z:+500[N]±19.6[m/s2]±1200[deg/s]±70000[nT]SensorForceAccelerationGyroGeomagnetism表1セン](https://thumb-ap.123doks.com/thumbv2/123deta/6493716.658771/6.892.464.814.621.949/Fig1ConstitutionNonlinearity±±FS±±HzHz2NZ+5N±196ms2±1セン.webp)