タブレット PC とポータブルな反力デバイスを用いた
滑車の仮想実験環境
Learning Support System for Pulley using Tablet PC and Portable Haptic Device
檜谷直樹
1松原行宏
1岡本勝
1Naoki Hidani
1, Yukihiro Matsubara
1and Masaru Okamoto
11
広島市立大学大学院情報科学研究科
1
Graduate School of Information Sciences, Hiroshima City University
Abstract: Recently, using tablet PCs in various school are conducted. Especially, it is remarked that all
students can use own tablet PC. There are some advantage that the students can study own speed by using own device. In this paper, we propose the learning support system of pulley learning using a tablet PC and a portable haptic device for giving all students to own experiment environment. The user can experience the virtual experiment of pulley with the force feedback. The force feedback is corresponding to a pulley combination constructed by the user, and presented to the user’s finger by touching the display. The pulley combination is constructed by arranging the pulleys displayed on the display. The system decides the pulley combination by the pulley’s position to the user can construct the pulley combination only arranging the pulleys. Additionally, the user can arrange pulleys with the trajectory of real experiment by using touch panel. In the verification, it confirmed that the learner can conduct the virtual experiment with the trajectory like the real experiment.
1 はじめに
近年,総務省によるフューチャースクール推進事 業など,実際の教育現場でタブレット PC を用いた 授業を行うなどの試みが行われている[1].タブレッ ト PC を用いた授業においては,生徒それぞれが学 習に自分の端末を用いる「一人一台型」が強く指向 されている.この学習形態では,学生が端末をそれ ぞれ用いることにより,自分に合わせた速さで学習 ができることや,協調学習への利用しやすいといっ た利点が考えられている.また,教師に対するアン ケートから,“多目的に利用できるタブレット端末に 対する期待は大きく、その用途としてもさまざまな 形態が想定されている”とされている[2].現在行わ れている研究は,生徒同士で画面を見せ合うことを 想定しタブレット PC を使用し概念マップを用いて 理科の理解を深めるシステムの開発を行った研究 [3]や,リアルタイムに文字や図を書き込める協調学 習を支援するアプリケーションを開発し,協調学習 への利用価値を分析した研究[4]など協調学習の形 でタブレット PC を利用することを想定したものが 多く見られる. 一方で,高等学校の学習指導要領によれば体験に よる学習は重要とされており[5],我々の研究グルー プではコンピュータを用いて仮想的に実験を行う研 究を行ってきた.沖見らは,仮想実験環境で滑車の 実験を行うシステムを開発した[6].このシステムで は,学習者は AR マーカを操作することで仮想空間 内の滑車の組み合わせを構築し,滑車の個数の違い から滑車の特性を学習できる.AR マーカにより滑 車を配置する動作は実験キットを使った場合の動作 を模しており,実際に滑車を設置するような動きで 滑車の配置を行える.また,学習者が実際に重さを 感じながら実験することを重要とし,反力デバイス を用いることで実際の実験のように重さの体験を可 能とした.このような仮想実験環境をタブレット PC が導入された現場で利用することを想定すれば,タ ブレット PC と仮想的な実験環境の双方の利点を持 つ学習支援システムを構築できると考えた. そこで,本研究ではタブレット PC を用いた滑車 を学習題材とした仮想実験環境を開発する.タブレ ット PC の画面上には複数の定滑車や動滑車が表示 され,その滑車を学習者が指でドラッグして配置で き る よ う に す る . ま た , 反 力 の 提 示 の た め に SPIDAR-tablet[7]を用いる.SPIDAR-tablet はタブレ ット PC と組み合わせて使用することにより,タッ 人工知能学会研究会資料 SIG-ALST-B401 − 13 −図 1: システムの外観. チ操作と同時に 2 次元的な反力を学習者に提示でき るデバイスである.このデバイスを用いることで, 学習者はタブレット PC 上に表示された糸を引くこ とで滑車の組み合わせの違いによる重さの変化を体 験できる.そのため,学習者は実験の動作をすべて タブレット PC 上に表示されたオブジェクトを操作 することにより行うことができる.以降,開発した 滑車の仮想環境についての詳細とそれを用いた学習 方法についての考察,仮想環境における実験動作と 実際の実験での実験動作との比較による本システム の実験動作の再現について述べる.
2 滑車の仮想実験環境
2.1 システムの概要
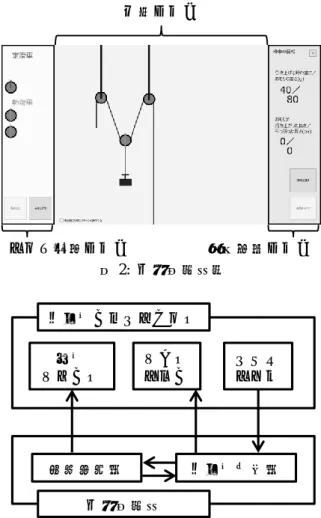
図 1 にシステムの外観を示す.タブレット PC の 周囲に設置されているフレームや図中央のリングは SPIDAR-tablet である.このデバイスは USB ケーブ ルでタブレット PC と接続され,フレームの四隅に 設置されたモータが糸を引くことにより反力を提示 することができる.学習者がこのリングに指をかけ ながらタブレット PC の操作を行うことで学習者は 反力の提示を受けることができる.タブレット PC の画面上には仮想実験室が表示されている.学習者 は仮想実験室上のオブジェクトを実験キットによる 実験と同様の動きで操作できる. 図 2 に仮想実験室を示す.仮想実験室はパーツ収 納エリア,作業エリア,情報表示エリアの 3 つのエ リアに分かれている.初期状態ではパーツ収納エリ アに定滑車,動滑車が 3 つずつ配置されている.こ の滑車を学習者が作業エリアに配置することによっ て,配置された滑車は滑車の組み合わせの部品とし て認識される.このとき,学習者は作業エリアのど の位置でも滑車を配置できる.滑車の組み合わせを 作業エリア パーツ収納エリア 情報表示エリア 図 2: 仮想実験室. 仮想実験室 反力 デバイス 入出力制御部 タッチ パネル ディス プレイ 滑車設計部 入出力インタフェース 図 3: システム構成図. 構築した後,糸を指でドラッグして引くことにより 滑車やおもりが持ち上がるシミュレーションを行う とともに,構築された滑車の組み合わせに応じた反 力の提示を行う.滑車の組み合わせが構築された状 態では滑車を配置することはできないが,左下の“糸 をはずす”ボタンを押すと滑車にかけられた糸とお もりが消え,再び滑車の配置が可能となる.このよ うな手順で学習者は繰り返し滑車の配置を自由設計 することで,様々な滑車配置パターンで実験を行い 滑車の組み合わせの違いによる重さの変化を比較す ることができる. このように学習者はタブレット PC の操作のみで 滑車の配置,重さの体験といった滑車の実験を行え るため,タブレット PC が導入された学習環境であ れば容易に本システムを用いることが可能である.2.2 システムの構成
図 3 にシステム構成図を示す.システムは入出力 インタフェースと仮想実験室から構成される.入出 力インタフェースから入力された情報を仮想実験室 で処理し,学習者へのフィードバックが入出力イン タブレット PC SPIDAR-tablet − 14 −タフェースに返される. 仮想実験室は滑車設計部と入出力制御部から構成 される.入出力制御部はディスプレイ上に表示され る滑車の位置や滑車間にかけられる糸の情報の保持 し,学習者がどのオブジェクトに触れたか,どの滑 車がどのエリアに配置されているか,糸が引かれた 際の滑車やおもりの挙動といった情報を管理する. 滑車設計部は入出力制御部から送信される仮想実験 室に配置された滑車の位置情報に基づき,その滑車 の並びに応じた糸のかけ方やおもりをつける位置の 計算を行う.また,構築した滑車の組み合わせに対 応した重さを計算し,学習者が糸を引く際の反力情 報を反力デバイスへ送る.
2.3 滑車の組み合わせの構築
滑車の組み合わせの構築は,システムにより学習 者が配置した滑車の左右の位置関係から自動的に行 われる.システムは,滑車を左から順に探索してい くことで糸やおもりを滑車に取り付ける位置を決定 する.滑車の組み合わせの構築は以下のアルゴリズ ムによって行われる. ステップ1. 最も左側に配置された滑車をチェック する. ステップ2. チェックした滑車が動滑車ならば,その 右の滑車をチェックする.定滑車ならば, ステップ 5 に移る. ステップ3. ステップ 2 でチェックした右側に定滑車 があるか何もない場合は,チェックした 滑車を,おもりを接続する候補の滑車と する. ステップ4. ステップ 2 でチェックした滑車の右側に 動滑車がある場合は,その滑車と右側の 滑車を糸でつなぐ. ステップ5. ステップ 2 でチェックした滑車の右側に ある滑車をチェックし,手順 2 に戻る. ステップ6. すべての滑車をチェックし終わったと き,おもりをつける候補の動滑車におも りをつける.候補の動滑車が複数ある場 合は,それらの動滑車を接続したのちに おもりをつける.おもりをつける候補の 動滑車がない場合は,右端の定滑車にか かる糸におもりを取り付ける. また,以上の手続きにより滑車間にかける糸やおも りを設定した後,動滑車の位置の自動調整を行う. 例えば,動滑車が隣接する定滑車より高い位置にあ る場合,定滑車より低い位置に移動させる.以上の 手順により滑車の組み合わせを構築することで,学 習者が滑車をどのように配置しても,滑車の組み合 わせを構築して実験を行うことができる. 図 5: 実験キットを用いた滑車配置. 反力デバイス 滑車の ARマーカ 仮想実験室の 様子 図 6: 従来システム[6]における滑車配置.3 検証実験
本検証では,タブレット PC で実装した仮想環境 においても実際の実験の動きを再現して実験を行え ることを確認する. 方法として,実際の器具を用いた実験環境,AR マーカを用いた仮想実験環境[6],タブレット PC を 用いた仮想実験環境のそれぞれにおいて学習者が実 験を行う様子を撮影し,手の動きの軌道を比較する ことにより仮想実験環境が滑車の配置,重さの体験 の動作において実際の実験と同様の動作で実験でき ていることを確認する.図 5 に実験キットを用いた 実験の様子を示す.被験者は配置した滑車に糸をか けて滑車の組み合わせを構築した後,糸を引くこと により重さを体験する.図 6 に従来システム[6]にお ける実験の様子を示す,従来システムでは,被験者 は滑車を模した AR マーカを配置することで自動的 にシステムによって滑車の組み合わせが構築される. その後,反力デバイスを用いて重さを体験する.こ のように被験者が実験を行う様子を背面から撮影し, 右手の動きを比較した.このとき,滑車の組み合わ − 15 −0 10 20 30 40 50 60 70 80 0 10 20 30 40 50 60 70 80 90 100 定滑車の位置 横軸[cm] 縦軸 [cm ] 実験キット 従来システム 提案システム 図 7: 定滑車を配置する際の動作の軌道. 0 10 20 30 40 50 60 70 80 0 10 20 30 40 50 60 70 80 90 100 横軸[cm] 縦軸 [cm ] 実験キット 従来システム 提案システム 糸の位置 図 8: 糸を引く際の動作の軌道. せを構築し重さを体験するまでの作業を分割し,そ れぞれの分割した作業ごとに比較を行った.軌道の 取得は,それぞれの環境において同様の操作を 10 回ずつ取得する.比較する際には 10 回分の軌道を平 均化した.平均化は作業に要した時間の 50 分の 1 ごとの座標値を平均して行った.また,提案システ ムはその他の環境に比べ実験する空間が狭くなって いるため,操作可能な空間の幅をその他の環境と等 しくなるように拡大している.図 7 に定滑車を配置 する際の軌道を示す.定滑車の位置は図 5 中の左上 の定滑車に対応する.また,すべての方法で同様の 位置に配置するように指示した.3 つの実験環境が 共に同様の軌道を示したことから,実際の実験を模 した従来システムシステムと同様,提案システムに おいても定滑車を配置する動きをとっていることが 分かった.図 5 中の動滑車においても,実験キット では糸をかける作業のため異なる軌道をとったが, 従来システムと提案システムとでは同一の軌道をと った.図 8 に糸を引く際の手の動きの軌道を示す. このように,従来システムのみが他の環境と比べ位 置が離れていることがわかる.これは,従来システ ムでは,滑車を模したマーカを操作した後に反力デ バイスを用いて重さを体験しているのに対し,提案 システムでは画面上に表示された糸を操作すること で重さを体験するからである.これら結果から,タ ブレット PC を用いた仮想実験環境においては学習 者が指で触れて操作するディスプレイ上のオブジェ クトを自由に表現できるという自由度から,実際の 実験を行うのと同様の動作による実験が可能なこと が分かった.
4 むすび
本研究では,タブレット PC とポータブルな反力 デバイスを用いた滑車の仮想実験環境を開発した. 検証では,AR マーカを用いたシステムとタブレッ ト PC を用いたシステムとの実験動作の比較を行い, タブレット PC を用いたシステムは実際の実験動作 に近い動作で実験を行うことができることがわかっ た.今後の課題として,本システムを繰り返し利用 することでの知識の定着可能性の検証を行うことな どが挙げられる. なお,本研究の一部は,日本学術振興会科研費(基 盤研究(c) No. 24501199)の助成による.参考文献
[1] 総務省, フューチャースクール推進事業: http://www.soumu.go.jp/main_sosiki/joho_tsusin/kyouiku _joho-ka/future_school.html, (2014 年 6 月 27 日確認) [2] 株式会社アイ・ティ・アール: 教育現場でのタブレッ ト活用における製品選定の指針, (2014) [3] 仁 野 由 彬 , 杉 原 康 太 , 吉 田 完 , 林 雄 介 , 平 嶋 宗 : Kit-Build 概念マップを用いた構造表出としての言 語活動の促進, 教育システム情報学会第 38 回全国大 会論文集, pp. 225-226, (2013)[4] Bonastre, O.M., Benavent, A.P., Belmonte, F.N.: Pedagogical Use of Tablet PC for Active and Collaborative Learning, International Professional Communication Conference, IEEE, pp214-218, (2006) [5] 文部科学省: 高等学校学習指導要領解説 理科編 理 数編, 実教出版, pp. 25-34, (2009) [6] 沖見圭洋, 松原行宏: 拡張現実型マーカを用いた滑 車配置実験のための学習支援システム, 日本教育工 学会論文誌, Vol. 37, No. 2, pp 107-116, (2013) [7] 田中理乃, 村山淳, 平田幸広, 佐藤誠, 原田哲也: タ ッ チ パ ネ ル の た め の 力 覚 イ ン タ フ ェ ー ス SPIDAR-tablet とその力覚計算方法の開発, 日本バー チャ ル リ アリ テ ィ 学会 論 文誌 , Vol. 16, No.3, pp. 363-366, (2011) − 16 −