セラミック基板を用いた人工視覚用多電極
CMOS
デバイスの試作
笹川 清隆
†森
康登
†春田 牧人
†鐘堂 健三
††寺澤 靖雄
††竹原 浩成
†田代 洋行
†,†††野田 俊彦
††††田
崇
†††††太田
淳
†A Multi-Electrode CMOS Integrated Device for Retinal Prosthesis Using Ceramic
Substrate
Kiyotaka SASAGAWA
†, Yasuto MORI
†, Makito HARUTA
†, Kenzo SHODO
††,
Yasuo TERASAWA
††, Hironari TAKEHARA
†, Hiroyuki TASHIRO
†,†††, Toshihiko NODA
††††,
Takashi TOKUDA
†††††, and Jun OHTA
†あらまし CMOS チップに集積化した制御回路により配線数を低減したフレキシブルな人工視覚デバイスを試 作し機能実証を行った.1 台のチップで 7 個の刺激電極を制御でき,これを多数接続することによって電極ア レーを構成可能である.電極はセラミック基板上に形成することによって生体の長期埋植においても劣化の少な い構成としている.また,生体適合性のあるパリレン C を基板とした Pt 配線で多数を接続し,柔軟性のある試 作デバイスを作製した.試作デバイスは,電流を設定して両極性刺激が可能であり,生理食塩水中で動作可能で あることを実証した.また,ラット眼球への埋植実験を行い,網膜に電気的な刺激を与え,脳において誘発電位 を計測されることを確認した. キーワード 人工視覚,生体埋植デバイス,CMOS 集積回路,電流刺激
1.
ま え が き
人工視覚システムは,視覚障害を補綴するための装
置であり,脳刺激型,視神経刺激型,網膜刺激型に大
別される.このうち,網膜刺激型は比較的手術が容易
な手法である.
我 々 は ,網 膜 刺 激 型 人 工 視 覚 シ ス テ ム の 中 で も
安全性が高く評価されている
STS
(
Suprachoroidal-†奈良先端科学技術大学院大学,生駒市Nara Institute of Science and Technology, 8916–5 Takayama, Ikoma-shi, 630– 0192 Japan
††株式会社ニデック,蒲郡市
Nidek Co., LTD, 34–14 Maehama, Hiroishi-cho, Gamagori-shi, 443–0038 Japan
†††九州大学,福岡市
Kyushu Univerisity, 3–1–1 Maidashi, Higashi-ku, Fukuoka-shi, 812–8582 Japan
††††豊橋技術科学大学,豊橋市
Toyohashi Univerisity of Technology, 1–1 Hibarigaoka, Tenpaku-cho, Toyohashi-shi, 441–8580 Japan
†††††東京工業大学,東京都
Tokyo Institute of Technology, 2–12–1–S9–11 Ookayama, Meguro-ku, Tokyo, 152–8550 Japan DOI:10.14923/transelej.2020JCI0019
Transretinal-Stimulation
:脈絡膜上経網膜刺激)方式の
人工視覚システムを目的として埋植型の刺激電極デバ
イスを開発している.これまで,高解像度で広視野角
な視覚を実現可能な刺激電極デバイスを目指して,多
点刺激可能な
CMOS
チップ分散型デバイスの試作・
開発を行ってきた
[1]
∼
[8]
.一方で,刺激電極デバイ
スは生体内に埋植を行うため,高い安全性と信頼性が
求められる.これまでのデバイスでは,ポリイミドの
フレキシブル基板を用いていたが,
10
年程度の長期
間埋植が可能なデバイスの実現を目標とした場合に,
吸湿性が高く生体内では絶縁性の特性変化が懸念され
る
[9], [10]
.そこで本研究では,長期埋植可能な刺激
電極デバイスの実現を目指し,より高い信頼性が期待
されるセラミック基板を導入し,デバイス作製プロセ
スの開発及び機能実証を目的とした.
2.
網膜刺激型人工視覚システム
網膜刺激型人工視覚システムでは,図
1
のように,
網膜や強膜に対し刺激電極デバイスを埋植して刺激を
行うことで視覚を再建する.この方式では,適応可能
図 1 脈絡膜上経網膜刺激型デバイスの眼球内配置
な疾患が網膜色素変性症や加齢黄斑変性症と限られる.
しかし一方で,眼球内は脳などに比べると免疫寛容で
あるため,脳に人工物を埋め込むよりも,感染症に罹り
にくいと考えられる.網膜刺激方式は更に,眼球に対
する刺激電極の埋植位置に応じて,網膜に角膜や硝子
体側から刺激する網膜上刺激方式
[11]
∼
[14]
,脈絡膜
と網膜の間に埋植して刺激する網膜下刺激方式
[15]
∼
[18]
,強膜内または強膜と脈絡膜の間に埋植し刺激す
る脈絡膜上―経網膜刺激方式
[19], [20]
の三つに分類
される.
本 研 究 は ,こ の う ち 脈 絡 膜 上 ― 経 網 膜 刺 激
(Suprachoroidal-Transretinal-Stimulation; STS)
方 式 に
適用するデバイスを目的としている.この手法は,
眼球を構成する組織の内,強固な膜である強膜に埋植
し,手術も網膜に触れることがなく,手術が網膜上や
網膜下方式と比較して安全なほか,デバイス自体が網
膜に対して低侵襲という特徴がある.一方,強膜,脈
絡膜を介して網膜の刺激を行うため,他の方式と比べ
て刺激しきい値が高く,高い負荷駆動力が必要である.
視覚における重要な要素として視力と視野角が挙げ
られる.そのため人工視覚デバイスにおいては,高い
視力と広い視野角の視覚を再建可能なデバイスの開発
が求められる.刺激電極デバイスによる網膜刺激のパ
ターンは,脳内である程度同じパターンとして知覚さ
れることが知られている.したがって,刺激電極の密
度は,再建可能な視力の分解能に,刺激電極アレーの
面積は視野角に関わる.密度に関しては,網膜上に電
極を配置した場合には最大で
60
µm
程度の分解能が得
られると報告されている.
[21]
刺激電極数に関しては,
文字の読み取りには,少なくとも
600
電極必要という
試算も報告されている
[22]
.しかし,現在の人工視覚
デバイスではそのような高解像度と広視野角を実現で
きるデバイスの開発が課題となっている.
STS
方式で
は,厚さが
0.8 mm
程度の脈絡膜を介して刺激を行う
ため,刺激可能な密度は原理的に他の手法より低い.
図 2 分散型 CMOS デバイスの模式図.1 チップで 7 電極 を制御し,フレキシブル基板を用いた配線で接続し てアレー化する.そのため,電極数の増加による視野角の向上がより重
要となるが,これに対する技術的な問題の一つは,刺
激電極数の増加に伴う配線数の増加にある.
2. 1
分散型
CMOS
デバイス
配線数の増加を解決するための手法として,低電力
な
CMOS
集積回路を眼球内埋植デバイスに統合し高
機能化をすることが有効となる.本研究では,刺激電
極数の数にかかわらず
4
本の配線で動作を制御するデ
バイスを開発した.このデバイスは,図
2
のように刺
激電流を出力する
CMOS
チップを刺激電極アレー状
に分散配置させ,共通の信号線で動作させる.これに
より,刺激電極数が増加しても,一定の配線数を保つ
ことができる.単位モジュールは,片面に
7
極の刺激
電極が形成され,もう一方の面にはこれらの電極への
刺激電流制御を行う
CMOS
チップが実装されている.
6
角形の小型のモジュールをハニカム状に配列し,単
位モジュール間はフレキシブル基板配線により相互接
続することで多電極アレーを構成する.
2. 2
セラミック単位モジュール
本研究で試作した単位モジュール構造を図
3
に示す.
長期埋植を目指す刺激電極デバイスの単位モジュール
材料として,生体適合性と優れた耐久性が求められる.
特に
CMOS
チップの気密封止が重要であり,これが不
十分であることが故障原因の多くをしめる例も報告さ
れている.
[23]
また,配線層や貫通電極を形成するこ
とができ,将来的に
CMOS
チップをハーメチックシー
ル可能な基板であることが求められる.このような材
料としてセラミックを用いた.今回用いたセラミック
基板は,対角が
2.66 mm
となっている.刺激電極は
Pt
で構成されており,直径が
500
µm
,高さ
20
µm
,ピッ
チは
800
µm
となっている.表面積を大きくすること
により刺激性能の改善が報告されているが
[24], [25]
,
図 3 試作デバイスの構造
本デバイスでは平坦表面としている.電極密度は網膜
上刺激デバイスと比較して低いが,本デバイスは脈絡
膜(厚さ
0.8 mm
程度)上に配置するため,密度向上
による更なる分解能改善余地は大きくないと考えられ
る.モジュールの基板層には,生体適合性と柔軟性に
優れた樹脂であるパリレン
C
を用いた
[26]
.パリレン
C
は
CVD
法によりコンフォーマルコーティング可能
なため全体を防水できること,また,フォトリソグラ
フィの薬品耐性があることもデバイス作製に適してい
る.中間層にはコネクタ接続用のフレキシブル配線基
板を設け,セラミック基板と
4
本の
Pt
配線が接続さ
れている.最上層には再度パリレン
C
層をコーティン
グし,電極部分にのみ開口を形成した.
2. 3
制御用
CMOS
チップ
制御
CMOS
チップの諸元を表
1
に示す.本チップ
は以下の要件を満たすように設計された.
•
小型かつ省配線で制御可能であること.
•
1,000
電極以上制御可能で超多電極化に対応可
能であること.
•
所望の強度の刺激電流を生成できること.
•
刺激電極への電流出力が任意に切り替えられる
こと.
図
4
に試作した制御用
CMOS
チップの外観を示す.
チップサイズは
500
µm × 500 µm
の正方形である.
厚さは研磨によって
100
µm
に薄型化している.動作
制御回路,刺激電流制御回路,電極スイッチング回路,
ヒューズラインによるチップ
ID
設定の機能を有して
いる.ヒューズラインは
8
本あり
256
チップ(
1,792
点の電極)まで
ID
を設定することが可能である.
2
本
の制御信号線
(C1, C2)
からの入力により,モジュール
指定及び刺激電極の選択,刺激電流値の設定,両極性
の刺激電流の出力の設定を行う.設定値は,各チップ
表 1 試作 CMOS チップ諸元プロセス 0.35µm 2-poly 4-metal 標準 CMOS 電源電圧 DC5V チップ寸法 500µm × 500 µm 刺激電極数 7 / チップ 最大モジュール数 256 入力配線数 4(電源 2,制御信号 2) 最大電流値 ±1550 µA (設計値) 図 4 試作 CMOS チップ外観
内のレジスタに保持され,刺激開始の信号とともに指
定された電極が同時に電流刺激を行う.これにより,
指定した画像パターンで同時に刺激することができ
る.刺激のタイミング及び幅は,刺激開始及び終了の
制御信号によって決定される.パルス幅は制御システ
ムにより
200
µs
から
100 ms
の範囲で
100
µm
ステッ
プで,パルスの電流値は
50
µA
から
1550
µA
まで
50
µA
ステップで指定可能となっている.両極性刺激に
より,刺激箇所に電荷が残留しないようにすることで
生体への安全性の向上を図っている.
12
個のパッド
サイズは
80
µm ×80 µm
であり,セラミック基板上に
これらに対応したパッドが対応するよう配置されてい
る.本チップは
5 V
で駆動され,
2
本の電力供給配線
と
2
本の制御信号配線の合計
4
本で駆動される.これ
らの配線は全てのモジュールで共通であり,モジュー
ル数が増加しても駆動に必要な配線数は
4
本である.
2. 4
実装プロセス
本研究で用いるセラミック基板は両面構造となって
いる.本研究では,アクリル製の治具にセラミック基
板を固定し,その上にパリレン
C
や
Pt
配線を積層させ
てデバイス実装を行った.図
5
に実装プロセスの基本
的な流れを示す.まず,アクリル治具にセラミック基
板とフレキシブルフラットケーブル
(Flexible flat cable;
FFC)
を固定した.
FFC
は,厚さ
0.22 mm
であり,機
器との接続に用いる.アクリル治具には,それぞれを
配置するための凹部を
CO
2レーザー加工により形成
した.それぞれの素子を嵌め込んで仮配置した後に,
約
135
℃,
1.4 kN
の圧力でプレスすることにより凹部
と各素子との空隙のない平坦な表面を得た.その後,
パリレン
C
薄膜を形成し,これをフレキシブル基板の
下層とした.次に,
Pt
配線と接続させる部分のパリレ
ン
C
を除去し,コンタクトホールを開口した後,リフ
トオフ法により
Pt
配線を形成した.ここで,
Pt
膜はス
パッタリング法により形成した.また,密着性の向上
のため
Pt
に先立って
Ti
層を形成した.配線幅は
240
µm
,配線ピッチは
310
µm
,
Pt
層厚は約
1
µm
とした.
その後,制御用
CMOS
チップをフリップチップ実装
した.更に,
2
層目のパリレン
C
を積層し,レーザで
図 5 埋植モジュール加工プロセス 図 6 試作モジュール写真.(a) チップ配置面.(b) 電極面. (c),(d) 屈曲時の様子加工した.最後にアセトンでアクリルを溶解し,デバ
イスをリリースした.
図
6
に作製したデバイス写真を示す.本デバイスは
パリレン
C
薄膜が
10.4
µm
厚,
Pt
金属配線が
1.1
µm
厚,セラミック基板が
400
µm
厚,
CMOS
チップが
100
µm
厚で構成されている.単位モジュール間はパ
リレン
C
と
Pt
配線のみで構成され,モジュール間隔
は
580
µm
となっている.図
6(c)
,
(d)
に示すようにモ
ジュール間の接続部は良好な柔軟性を示し,眼球に対
して無理なく沿うように配置できることが分かる.ま
た,
FFC-
モジュール間の配線も直径
1.0 mm
の金属棒
に沿って無理なく曲げることが可能である.
3.
試作デバイス評価
試作した人工視覚デバイスの有用性を実証するため,
リン酸緩衝生理食塩水中での評価を行った.図
7
にデ
バイス駆動システムの概要を示す.駆動システムは制
御プログラム,制御装置,中継基板から構成される.
PC
からの制御信号は制御装置で
GND
分離と波形整
形がなされ,中継基板を介して刺激電極デバイスへと
送信される.最後に,受信した制御信号をもとにデバ
イスが動作し,刺激電極から刺激電流を出力する.
本制御装置は,
5 V
電源系で十分な電流量の両極性
刺激を実現するため,カソーディック刺激のときは,
対向電極が刺激回路の最高電位に接続され,アノー
ディック刺激のときは,対向電極が刺激回路における
最低電位に接続される.これ以外のときには,対向電
極は電気的に浮遊状態となり,この間の電位は生体の
自然電位に決定される(フローティング方式)
.これに
より電流刺激時により高い電圧をかけることができ,
負荷駆動力が大きく向上する.
図
8
に試作したデバイスを用いて,刺激電極からの
図 7 電流刺激出力実験系図 8 リン酸緩衝生理食塩水中での電流出力測定結果
電流出力の測定を行った結果を示す.両極性の刺激波
形を出力されており,開発した作製プロセスでデバイ
スが動作することが確認できる.また,設計電流値と
の差はあるものの,電流値設定機能が正常に動作して
いることが確認された.出力は設定値に比例した電流
値となっており,安定的な動作をしていることを示し
ている.また,刺激の主成分であるカソーディック刺
激及びアノーディック刺激にそれぞれ
100
µsec
前に
スパイク状のノイズが発生しているが,これは刺激回
路と対向電極との接続を操作するスイッチが切り替わ
るタイミングで発生しており,生体や制御回路の浮遊
容量に蓄積された電荷が流れることによるノイズだと
考えられる.電流刺激と比較すると,電荷量は低く刺
激動作への影響は軽微と思われる.出力波形はほぼ矩
形波となり,
5 V
の電源電圧でも
1 mA
程度まで定電
流刺激が行えることが確認できた.
4.
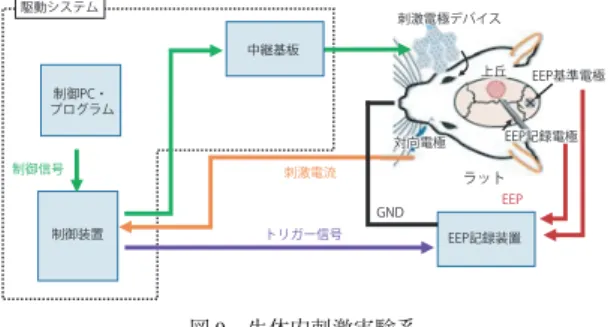
生体内における評価
試作したデバイスを用いて
in-vivo
(生体内)での機
能検証を行った.実験系を図
9
に示す.ラットの眼球
を作製した刺激電極デバイスで電気刺激し,脳の上丘
から刺激誘発電位
(Electrically Evoked Potential: EEP)
の測定を行った.電気刺激の結果として
EEP
が測定
されることで,人工的な視覚の誘発がされていること
を確認できる.なお,本実験は動物実験において文部
科学省が定める,研究機関等における動物実験等の実
施に関する基本方針を遵守し,株式会社ニデックの動
物実験規定に基づいて実施した.
観察対象には,ラット(
Long-Evans
;生後
10
週齢,
383.8 g
)を用いた.実験手順を以下に示す.まず,導
入麻酔としてセボフルランの吸引を施したのち,実投
図 9 生体内刺激実験系与量でウレタン
1.7 ml
,ソルメルコート
0.3 ml
の腹腔
内投与及び,アトロピン
0.38 ml
の筋肉注射を施し,
麻酔下においた.次に,刺激電極を眼球に設置するた
めに,頭皮切除を行い,頭蓋を一部除去したのち,眼
球を露出させた.続いて,電気刺激に対する
EEP
を測
定するために,視覚中枢の上丘の露出を行った.その
後,
EEP
測定用の記録電極を上丘表面より
250
µm
の
深さへ刺入し,記録電極の基準電極となるスクリュー
を後頭骨から小脳に向かって設置した.また,刺激に
用いる対向電極用のシリンジ針をラットの鼻部に刺入
した.
手術を行ったラットに対して,
EEP
測定を行うため
の実験系を構築した.作製した刺激電極デバイスを眼
球に設置した.ラットでは眼球が小さいため,仕様デ
バイスは
1
モジュールのものを用いた.通常
STS
方
式では強膜を半層切開し,その中にデバイスの埋植を
行うが,ラットでは強膜厚が薄く強膜ポケットの形成
が困難であるため,強膜の表面に押し当てるようにし
た.次に,刺激電極からの刺激波形を測定するために,
鼻部の対向電極を制御装置と接続した.
構築した実験系で刺激電極デバイスから対向電極に
向かって刺激を行い,対向電極から刺激波形,
EEP
記
録装置から
EEP
の測定を行った.生体
GND
はラット
の口を固定している治具の電位とした.なお,
EEP
の
測定にはプリアンプ(
10
倍)と差動アンプ(
Low-cut
10 Hz
,
High-cut 5 kHz
,
100
倍)を用い,
1,000
倍の増
幅率で
EEP
信号を増幅後,制御装置の電気刺激より
50 msec
前に生成されるトリガ―信号に同期させて,
EEP
の記録を行い,
100
回試行で記録した信号を加算
平均処理した.
ラットに対して指定した電極から電気刺激を行い,
測定した刺激波形を図
10
に示す.各刺激電流値にお
いて,両極性の刺激波形が対向電極から測定され,体
内環境において刺激電極デバイスが正常に動作するこ
図 10 生体内での電流出力測定結果 図 11 EEP 信号計測結果
とを確認した.低電流設定時は設定値に比例した電流
出力であり,安定的な動作が確認された.一方で,高
い電流設定値では,生体の負荷に対して設定された電
流量を流し続けることができず次第に出力電流が低下
した.これは,設定値を増加させても刺激電流量の増
加が十分に得られないことを示しているが,この条件
を含めた刺激実験を行った.
各刺激電流値による
EEP
の応答を図
11
に示す.刺
激開始時に大きなノイズが生じているが,刺激電流に
よって混入したアーチファクトである.刺激開始を
0
s
として,約
5 ms
後に一つ目のピーク
P1
(図中下向
き),約
10 ms
後に二つ目のピーク
N1
(図中上向き)
が
0.7 mA
の刺激付近から明瞭に観測された.この波
形は,典型的なラットの
EEP
波形とおおよそ一致して
おり,試作したデバイスによって人工的な視覚が誘発
されていることを示唆している
[27]
.刺激電流設定値
が
1.1 mA
以上では大きな差が見られないことは,設
定値に対応した十分な刺激電流が得られないことと合
致している.
5.
む す
び
本研究では,セラミック基板を用いた
CMOS
チッ
プ搭載人工視覚デバイスを提案し,機能実証を行った.
セラミック基板間は,生体適合性の高い樹脂であるパ
リレン
C
に包埋された
Pt
配線を用いており,眼球に
沿わせることのできるフレキシブル性を備えている.
また,複数の
CMOS
チップを共通の
4
配線で駆動可
能であり,電流を設定して両極性刺激が可能であるこ
とを示した.ラットを用いた動物実験では,実際に網
膜に電気的な刺激を行い,脳における誘発電位が計測
されることを示した.今後は,電源の交流化や長期埋
植時の特性評価を行い更なる安全性の向上を目指す.
謝辞 本論文の一部は,寺田啓介氏(
2019
年
3
月博
士前期課程了)の協力によって行われました.本研究
は,東京大学
VDEC
活動を通して,ケイデンス株式会
社及びメンター・グラフィクス株式会社の協力で行わ
れました.
文
献
[1] J. Ohta, T. Tokuda, K. Kagawa, T. Furumiya, A. Uehara, Y. Terasawa, M. Ozawa, T. Fujikado, and Y. Tano, “Silicon LSI-based smart stimulators for retinal prosthesis,” IEEE Engineering in Medicine and Biology Magazine, vol.25, no.5, pp.47–59, 2006. [2] J. Ohta, T. Tokuda, K. Kagawa, S. Sugitani, M. Taniyama, A. Uehara, Y. Terasawa, K. Nakauchi, T. Fujikado, and Y. Tano, “Laboratory investigation of microelectronics-based stimulators for large-scale suprachoroidal transretinal stimulation (STS),” J. Neural Engineering, vol.4, no.1, p.S85, 2007.
[3] T. Tokuda, K. Hiyama, S. Sawamura, K. Sasagawa, Y. Terasawa, K. Nishida, Y. Kitaguchi, T. Fujikado, Y. Tano, and J. Ohta, “CMOS-based multichip networked flexible retinal stimulator designed for image-based retinal prosthesis,” IEEE Trans. Electron Devices, vol.56, no.11, pp.2577–2585, 2009.
[4] T. Tokuda, Y. Takeuchi, Y. Sagawa, T. Noda, K. Sasagawa, K. Nishida, T. Fujikado, and J. Ohta, “Development and in vivo demonstration of cmos-based multichip retinal stimulator with si-multaneous multisite stimulation capability,” IEEE Trans. Biomed-ical Circuits Syst., vol.4, no.6, pp.445–453, 2010.
[5] T. Noda, K. Sasagawa, T. Tokuda, H. Kanda, Y. Terasawa, H. Tashiro, T. Fujikado, and J. Ohta, “Fabrication of fork-shaped reti-nal stimulator integrated with CMOS microchips for extension of viewing angle,” Sensors Mater., vol.26, no.8, pp.637–648, 2014. [6] T. Noda, K. Sasagawa, T. Tokuda, Y. Terasawa, H. Tashiro, H.
Kanda, T. Fujikado, and J. Ohta, “Performance improvement and functionalization of an electrode array for retinal prosthesis by iridium oxide coating and introduction of smart-wiring technol-ogy using CMOS microchips,” Sensors and Actuators A: Physical, vol.211, pp.27–37, 2014.
[7] J. Ohta, T. Noda, K. Shodo, Y. Terasawa, M. Haruta, K. Sasagawa, and T. Tokuda, “Stimulator design of retinal prosthesis,” IEICE
Trans. Electron., vol.100, no.6, pp.523–528, 2017.
[8] T. Noda, Y. Nakano, Y. Terasawa, M. Haruta, K. Sasagawa, T. Tokuda, and J. Ohta, “Performance improvement and in vivo demonstration of a sophisticated retinal stimulator using smart electrodes with built-in CMOS microchips,” Jpn. J. Appl. Phys., vol.57, no.10, p.1002B3, 2018.
[9] J.H. Lee, H. Kim, J.H. Kim, and S.-H. Lee, “Soft implantable microelectrodes for future medicine: prosthetics, neural signal recording and neuromodulation,” Lab on a Chip, vol.16, no.6, pp.959–976, 2016.
[10] Y. Sun, S. Lacour, R. Brooks, N. Rushton, J. Fawcett, and R. Cameron, “Assessment of the biocompatibility of photosensitive polyimide for implantable medical device use,” J. Biomedical Ma-terials Research Part A: An Official J. The Society for BiomaMa-terials, The Japanese Society for Biomaterials, and The Australian Society for Biomaterials and the Korean Society for Biomaterials, vol.90, no.3, pp.648–655, 2009.
[11] A.K. Ahuja, J. Dorn, A. Caspi, M. McMahon, G. Dagnelie, L. daCruz, P. Stanga, M. Humayun, R. Greenberg, ArgusII Study Group, “Blind subjects implanted with the Argus ii retinal pros-thesis are able to improve performance in a spatial-motor task,” British J. Ophthalmology, vol.95, no.4, pp.539–543, 2011. [12] D.D. Zhou, J.D. Dorn, and R.J. Greenberg, “The Argus®II retinal
prosthesis system: An overview,” 2013 IEEE Int. Conf. Multime-dia and Expo Workshops (ICMEW)IEEE, pp.1–6 2013. [13] L. daCruz, J.D. Dorn, M.S. Humayun, G. Dagnelie, J. Handa,
P.-O. Barale, J.-A. Sahel, P.E. Stanga, F. Hafezi, A.B. Safran, J. Salzmann, A. Santos, D. Birch, R. Spencer, A.V. Cideciyan, E. de Juan, J.L. Duncan, D. Eliott, A. Fawzi, L.C.O. de Koo, A.C. Ho, G. Brown, J. Haller, C. Regillo, L.V. Del Priore, A. Arditi, and R.J. Greenberg, “Five-year safety and performance results from the Argus II retinal prosthesis system clinical trial,” Ophthalmology, vol.123, no.10, pp.2248–2254, 2016.
[14] Y.H.-L. Luo and L. Da Cruz, “The Argus®II retinal prosthesis system,” Progress in Retinal and Eye Research, vol.50, pp.89–107, 2016.
[15] K. Stingl, R. Schippert, K.U. Bartz-Schmidt, D. Besch, C.L. Cottriall, T.L. Edwards, F. Gekeler, U. Greppmaier, K. Kiel, A. Koitschev, L. Kühlewein, R.E. MacLaren, J.D. Ramsden, J. Roider, A. Rothermel, H. Sachs, G.S. Schröder, J. Tode, N. Troelenberg, and E. Zrenner, “Interim results of a multicenter trial with the new electronic subretinal implant alpha ams in 15 patients blind from inherited retinal degenerations,” Frontiers in neuroscience, vol.11, p.445, 2017.
[16] T.L. Edwards, C.L. Cottriall, K. Xue, M.P. Simunovic, J.D. Ramsden, E. Zrenner, and R.E. MacLaren, “Assessment of the electronic retinal implant alpha AMS in restoring vision to blind patients with end-stage retinitis pigmentosa,” Ophthalmology, vol.125, no.3, pp.432–443, 2018.
[17] R. Daschner, A. Rothermel, R. Rudorf, S. Rudorf, and A. Stett, “Functionality and performance of the subretinal implant chip Al-pha AMS,” Sens. Mater, vol.30, pp.179–92, 2018.
[18] H. Faber, D. Besch, K.-U. Bartz-Schmidt, H. Eisenstein, J. Roider, H. Sachs, F. Gekeler, E. Zrenner, and K. Stingl, “Restriction of eye motility in patients with RETINA IMPLANT Alpha AMS,” Acta
Ophthalmologica, pp.e998–e1003, 2020.
[19] L.N. Ayton, P.J. Blamey, R.H. Guymer, C.D. Luu, D.A. Nayagam, N.C. Sinclair, M.N. Shivdasani, J. Yeoh, M.F. McCombe, R.J. Briggs, N.L. Opie, J. Villalobos, and P.N. Dimitrov, “First-in-human trial of a novel suprachoroidal retinal prosthesis,” PloS one, vol.9, no.12, p.e115239, 2014.
[20] T. Fujikado, M. Kamei, H. Sakaguchi, H. Kanda, T. Endo, M. Hirota, T. Morimoto, K. Nishida, H. Kishima, Y. Terasawa, K. Oosawa, M. Ozawa, and K. Nishida, “One-year outcome of 49-channel suprachoroidal-transretinal stimulation prosthesis in pa-tients with advanced retinitis pigmentosa,” Investigative Ophthal-mology & Visual Science, vol.57, no.14, pp.6147–6157, 2016. [21] M.R. Behrend, A.K. Ahuja, M.S. Humayun, R.H. Chow, and J.D.
Weiland, “Resolution of the epiretinal prosthesis is not limited by electrode size,” IEEE Trans. Neural Systems and Rehabilitation Engineering, vol.19, no.4, pp.436–442, 2011.
[22] J. Sommerhalder, B. Rappaz, R. deHaller, A.P. Fornos, A.B. Safran, and M. Pelizzone, “Simulation of artificial vision: II. eccentric reading of full-page text and the learning of this task,” Vision Research, vol.44, no.14, pp.1693–1706, 2004.
[23] R. Daschner, U. Greppmaier, M. Kokelmann, S. Rudorf, R. Rudorf, S. Schleehauf, and W.G. Wrobel, “Laboratory and clinical relia-bility of conformally coated subretinal implants,” Biomedical Mi-crodevices, vol.19, no.1, p.7, 2017.
[24] T. Watanabe, R. Kobayashi, K. Komiya, T. Fukushima, H. Tomita, E. Sugano, H. Kurino, T. Tanaka, M. Tamai, and M. Koyanagi, “Evaluation of platinum-black stimulus electrode array for electri-cal stimulation of retinal cells in retinal prosthesis system,” Jpn. J. Appl. Phys., vol.46, no.4S, p.2785, 2007.
[25] Y. Terasawa, H. Tashiro, Y. Nakano, K. Osawa, M. Ozawa, T. Noda, T. Tokuda, J. Ohta, and T. Fujikado, “Charge injection ca-pacities of femtosecond laser-induced porous electrodes measured in vitro and in vivo: comparison between porous and smooth elec-trodes,” Investigative Ophthalmology & Visual Science, vol.55, no.13, pp.1803–1803, 2014.
[26] C. Hassler, R.P. vonMetzen, P. Ruther, and T. Stieglitz, “Charac-terization of parylene c as an encapsulation material for implanted neural prostheses,” J. Biomedical Materials Research Part B: Ap-plied Biomaterials: An Official J. The Society for Biomaterials, The Japanese Society for Biomaterials, and The Australian Society for Biomaterials and the Korean Society for Biomaterials, vol.93, no.1, pp.266–274, 2010.
[27] H. Kanda, T. Morimoto, T. Fujikado, Y. Tano, Y. Fukuda, and H. Sawai, “Electrophysiological studies of the feasibility of suprachoroidal-transretinal stimulation for artificial vision in nor-mal and RCS rats,” Investigative ophthalmology & visual science, vol.45, no.2, pp.560–566, 2004.
(2020 年 10 月 16 日受付,2021 年 1 月 22 日再受付, 2 月 9 日早期公開)
![図 1 脈絡膜上経網膜刺激型デバイスの眼球内配置 な疾患が網膜色素変性症や加齢黄斑変性症と限られる. しかし一方で,眼球内は脳などに比べると免疫寛容で あるため,脳に人工物を埋め込むよりも,感染症に罹り にくいと考えられる.網膜刺激方式は更に,眼球に対 する刺激電極の埋植位置に応じて,網膜に角膜や硝子 体側から刺激する網膜上刺激方式 [11] 〜 [14] ,脈絡膜 と網膜の間に埋植して刺激する網膜下刺激方式 [15] 〜 [18] ,強膜内または強膜と脈絡膜の間に埋植し刺激す る脈絡膜上―経網膜刺激方式](https://thumb-ap.123doks.com/thumbv2/123deta/8139612.1268932/2.773.402.707.98.275/脈絡膜上経網デバイスしかし比べる人工物埋め込むにくいられる.webp)
![図 3 試作デバイスの構造 本デバイスでは平坦表面としている.電極密度は網膜 上刺激デバイスと比較して低いが,本デバイスは脈絡 膜(厚さ 0.8 mm 程度)上に配置するため,密度向上 による更なる分解能改善余地は大きくないと考えられ る.モジュールの基板層には,生体適合性と柔軟性に 優れた樹脂であるパリレン C を用いた [26] .パリレン C は CVD 法によりコンフォーマルコーティング可能 なため全体を防水できること,また,フォトリソグラ フィの薬品耐性があることもデバイス作製に適してい る.中間](https://thumb-ap.123doks.com/thumbv2/123deta/8139612.1268932/3.773.420.689.113.424/デバイスモジュールコンフォーマルコーティングフォトリソグラ.webp)