水中カメラKG-6のストロボ発光長期化改良と曳航海
底撮影装置の開発
著者
伊藤 麻美, 児玉 正二, 井上 喜洋, 五島 正哲
雑誌名
鹿児島大学水産学部紀要=Memoirs of Faculty of
Fisheries Kagoshima University
巻
57
ページ
11-17
別言語のタイトル
Improvement on Life Span of The Battery for a
Strobe Light KG-6 and Development of a
Stabilizing Towing Device for Underwater
Photography
2 ോఱڠକॲڠ໐ȪFaculty of Fisheries, Kagoshima University, 5-61-31 Shimoarata, Kagoshima, 9:1-1167 Japanȫ (*Email:a-ito@fi sh.kagoshima-u.ac.jp)
3 ࢃͺ·ͺΞͻΛ·ΑȪڼȫ(Goto Aquatics Co.LTD., 2271-6 Manazuru, Ashigarashimogun, Kanagawa, 36:-1312 Japan)
କಎιρ KG-6 ͈ΑΠυδอಿܢا٨ၻ͂ה࣎٬ೲज़ג౾͈ٳอ
ུࡄݪ͉́Ȅକಎ͈́ಿশۼज़גͬخෝ̳̹ͥ͛ͅକ ಎΟΐΗσιρ KG-7ȪոئȄKG-7 ̳͂ͥȫ́ٳอ ̱̹ഩႁଷࢄٝႹ2) ͬఈ͈ज़גဥܥܕ͒؊ဥ̳̭̤ͥ͂ ͍͢ज़גࡑ༞੩ܕऺ͈ٳอͥ͢ͅज़גࡑํս͈ڐఱ ͬ࿒എ̳͂ͥȃ չͣ2ȫ͉Ȅঌ์̯̞ͦ̀ͥΟΐΗσιρȪոئȄ Οΐῖ̳ͥȫͬକಎ͈́ಿশۼज़גͅచ؊̳ͥΏΑ Ξθ͈ٳอ̤̭̹ͬ̈́̽ȃΟΐῖۋഩ౻͈ۼͅഩႁ ଷࢄٝႹͬழ͙ࣺ͙Οΐι͈͒ಿশۼ͈ഩႁރݯͬদ ͙̹ȃਲြঀဥ̱̞̹̀ဥਰഩ౻ȪDB-71ȄςΙ;θ ͼϋഩ౻ȫ̱̩͉͜ౙঅۋഩ౻ 3 ུȪͺσςۋഩ౻Ȅ ΅ΏρͼΡۋഩ౻̹͉͘ΣΛΉσକளۋഩ౻ȫঀဥ́ ͈ज़גশۼ͉ 4.6 শۼ̥ͣ 5 শۼ̜̹̦́̽Ȅٳอ̽͢ͅ ̀डಿ 2: শۼ͈ज़ג̦خෝ̹͂̈́̽ȃഩႁଷࢄٝႹ ̦ಿশۼ͈ഩႁރݯͅခ̜̭̦࢘́ͥ͂બྶ̯̹̹ͦ ͛ȄKG-7 ͈ΑΠυδഩ࡙͈͒؊ဥ͜خෝ̜́ͥ͂ࣉ̢ ̹ȃKG-7 ͈Οΐιഩ࡙ٳอ͈͙͉́ΑΠυδ͈ঀဥ خෝশۼ̦Οΐὶ͓ͅౣ̩Ȅज़גࢃ̈́ͥ͂ͅΑ Πυδ͈ഩ࡙͈ਞၭͤ͢ͅະྶၸْ̈́௨̦͙̹̹ͣͦ͛ ΑΠυδ͈ঀဥশۼ͈װಿ̦ະخ̹ࠧ͂̈́̽ȃΑΠυδ ͈ಿশۼঀဥ̦خෝ̈́ͦ͊ͅಓͅ۾̴ͩͣͤ͢ྶ̈́ ْ௨̦ංͣͦͥ͂ࣉ̢ͥȃज़ג༹༷̞̭͉̾̀ͦ́͘ͅ ݿ࿌൝ͅ KG-7 ͬࡥ̱̀କಎज़גࡑ̤̭̞ͬ̈́̽̀ ̹̦ȄKG-7 ͅज़ג༞੩ܥऺͬ৾ͤັ̫ה࣎ज़ג̦خෝ AbstractUnderwater photographs of fi shing gears and fi sh behavior are useful for fi shery technical development and natural environment investigation. In our previous study, we used a voltage controller to extend the battery duration time in an underwater digital camera and be able to take photographs for longer time. In this time, we tried to apply a voltage controller to the stroboscope for getting clearer photographs. Photography experiments were conducted using a small set-net located at a 10m depth. We succeeded to take good quality photographs at intervals of 60 and 120 seconds, obtaining performance that lasted 19 and 14 hours, respectively. The newly developed voltage controller was effective at supplying power longer to the stroboscope used in our study.
In addition to that application, we developed a new stabilizing apparatus for taking underwater photographs clearly while towing a camera. Photography experiments were conducted using the training ships "Nanseimaru" and "Shiranami" at depth ranging from 20 m-200 m in the Kagoshima Bay. We succeeded in taking good quality photographs of fi sh and other organism.
չཻȄ
2*ޮୃඵȄ
2ȁ֔ષܔဢȄ
2ȁࡼോୃഓ
3Improvement on Life Span of The Battery for a Strobe Light KG-6
and Development of a Stabilizing Towing Device for Underwater Photography.
Asami Ito,
1*Syoji Kodama,
1Yoshihiro Inoue
1and Masaaki Goto
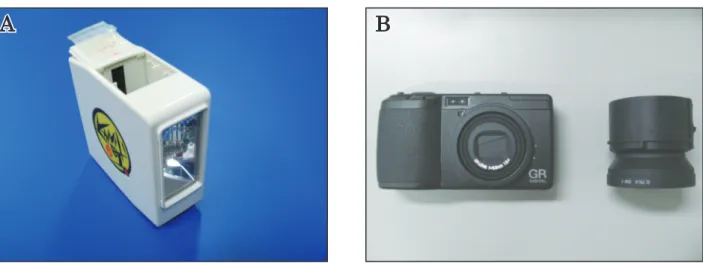
212 ോఱڠକॲڠ໐ܮါȁలĶĸےȪijııĹȫ ͂̈́ͦ͊ࡑ͈໙̦̯ͣͅࢩ̦ͥ͂ࣉ̢ͥȃ ུࡄݪ͉́Ȅӱ KG-7 ́ٳอ̱̹ഩႁଷࢄٝႹͬΑΠ υδ͂ۋഩ౻͈ۼͅழ͙ࣺ͙ΑΠυδ͈ঀဥশۼ͈װಿ ࡑْ͂௨͈ບثȄӲ KG-7 ͈́ज़גࡑ͈̹͛༞੩ܥ ऺ͈ٳอͬ࿒ດ̳͂ͥȃ ऺၳ༹༷͂ ུࡄݪ͉́ȄKG-7 ́ٳอ̱̹ഩႁଷࢄٝႹͬΑΠυ δͅ؊ဥ̱ΑΠυδ͈ঀဥশۼ͈װಿͬদ͙̹ȃ̹͘Ȅ KG-7 ͈କಎज़גࡑဥ͈ज़ג༞੩ܥऺͬٳอ̱̹ȃ ΑΠυδ ๊֚ͅΟΐι͈ୃΑΠυδ͉ࣞثུ̜̹́ͥ͛ ࡄݪ́ঀဥ̱̹ΑΠυδ͉հث́ව̦ယօ̈́ΑΠυδ ȪκȜςΑ২ୋȇΪσ 7ȫͬ 2 రঀဥ̱̹ȃΑΠ υδْ͈௨ͬ Fig.2 ͈ A ͅা̳ȃ Οΐι Οΐι͉ RICOH ২ୋ͈ȶGR DEGITALȷ̜́ͥȃ ̭͈Οΐι఼̱̹ͬၑဇ͉ٸັ̫έρΛΏνဥ͈୪ ঊ̦̞̭ͩ̽̀ͥ͂Ȅഩ౻̦̳ͥࡠ֚ͤশ ۼۼڞ́ΏλΛΗȜ̦୨ͦͥͼϋΗȜΨσज़ג̦ࠑ̱ ̀خෝ̜̭́ͥ͂Ȅ̤͍͢հث̜̭̦́ͥ͂ݷ̬ͣͦͥȃ ̹͘Ȅࢩْ̞ڙ́ज़ג̳̹ͥ͛ͅࢩڙϋΨȜΐοϋτ ϋΒȪRICOH ২ୋȇGW-2 ̤͍͢ GH-2ȫͬঀဥ̱̹2ȫ ȃ Οΐι̤͍͢ࢩڙϋΨȜΐοϋτϋΒͬ Fig.2 ͈ B ͅা̳ȃ Χ;ΐϋΈ ུࡄݪ́ैୋ̱̹Χ;ΐϋΈͬ Fig.3 ̤͍͢ Fig.4 ͅ া̳ȃFig.3 ͈ A ͉Χ;ΐϋΈୃ࿂ͬȄB ͉ࢃ༷ͬা̱ ̞̀ͥȃΧ;ΐϋΈ͉ΟΐῖΑΠυδ̷̸ͬͦͦ ਓො̳ͥൟယܕͬΑΞϋτΑࣙโ̞̺́̾̈́ࢹ௮̱͂ ̹2ȫ ȃ Fig.4 ͈ A ͅা̱̹Οΐιਓො໐͉ιρ͈ୃ࿂τ ϋΒ௰͈ڀͬະ൫ྶ̈́ MC ͼυϋ 912ȄൟယܕͬΑ ΞϋτΑࣙȄࢃ༷௰͈ڀͬ൫ྶεςȜδΥȜΠਏড́ ̷̸ͦͦैୋ̱̹ȃ̹͘ȄτϋΒ௰͈ڀ͉ͅτϋΒஜ࿂ ͅཹ̧΄ρΑ͉ࣺ̺ͬ͛ͭௗͬ৾ͤັ̫̹ȃιρஜ࿂ ڀͅ΄ρΑௗͬழ͙ࣺ̺͈͉ͭओ͞ე͙̳̹ͬٝͥ ̜͛́ͥȃΟΐιͬࡥ̳ͥͺΗΛΙιϋΠͬاΫ Σσڙऺ́ैୋ̱৾ͤັ̫̹2ȫ ȃ Fig.4 ͈ B ͅা̱̹ΑΠυδਓො໐͉Ȅୃ࿂อ௰͈ ڀͬ൫ྶεςȜδΥȜΠਏডȄൟယܕͬΑΞϋτΑ ࣙȄࢃ༷௰͈ڀͬ MC ͼυϋ 912 ̷̸́ͦͦैୋ̱̹ȃ ̭͈ಎͅΑΠυδ 3 ࡢͬ৾ͤັ̫̹2ȫ ȃ ΑΠυδ͈อ͂Οΐι͈ΏλΛΗȜͬ൳ܢ̵̯ͥ ̹͛Ȅၰ৪ͬΏϋ·υΉȜήσ́ഩܨഎͅ୪̳ͥຈါ ̦̜ͤȄ;τΗϋਏড́ैୋ̱̹କྟΥ·ΗȜͬΧ; ΐϋΈ͈Οΐιਓො໐͂ΑΠυδਓො໐͈ࢃ༷৾ͤͅ ັ̫̹ȃအș̈́ࡑ૬ഽͅచ؊̧̠́ͥ͢ͅȄΧ;ΐϋ Έ̤͍͢କྟΥ·ΗȜ͉ఛգକ૬̦ 511 m ̠͂̈́ͥ͢ ͅ୭̱̹ࠗ2ȫ ȃ ΑΠυδഩ࡙ ঀဥ̱̹ΑΠυδ͉ඤ௬ഩ࡙̱͂̀ౙ२ۋഩ౻ 5 ུͬ ુঀဥ̳ͥȃ̭͈ΑΠυδ͈ঀဥশۼͬװಿ̵̯̭ͥ ͂́ಿশۼज़ג̤̫ͥͅྶၸْ̈́௨ͬං̭ͥ͂ͬ࿒ດ͂ ̱̹ȃΧ;ΐϋΈඤ͈ΑΠυδਓොΑβȜΑͬခ࢘ͅڰ ဥ̱̀ఉତ͈ۋഩ౻ͬ൏श̱Ȅ̷͈ഩႁͬ࢘ၚഎͅঀဥ ̧̠́ͥ͢ͅഩঊٝႹͬழ͙ࣺ͚̭̱̹͂͂ȃۋഩ౻͉ ςΙ;θۋഩ౻ȪFUJIFILMȄܳഩႁ 2.6 Vȫͬঀဥ̱̹ȃ ̭͉ͦչͣ2)͈ࡑͤ͢ಿশۼज़גͅഐ୨̜́ͥ͂ࣉ ̢̹̹̜͛́ͥȃ ུࡄݪ́ဥ̞̹ΑΠυδͬΧ;ΐϋΈ̳ͥ͂ͅ ౙ२ۋഩ౻ 9 ུͬΧ;ΐϋΈඤͅਓ̧̭̦̹͛ͥ͂́ ̹͛Ḙ̏ͦͣۋഩ౻ 9 ུͬೄႥͅ୪̱̹ȃೄႥͅ୪ ̱̹͈͉ȄႥ̷̸̞͈̾̈́́ͦͦͅۋഩ౻ͅഩգओ̦ ̜̹̽ાࣣͅഩգ͈೩̞ഩ౻ͅഩၠ̦ၠࣺͦͭ́อ̳ ͥخෝ̦̜̭̳̹̜ͤͦͬٝͥ͛́ͥȃ̱̥̱Ȅۋ ഩ౻ 9 ུ͈୪ͤ͢ͅഩգ̦ 23 V ̩͂ࣞ̈́ͥȃુ 5 ུ͈ۋഩ౻ͬೄႥͅࠒ̞́ঀဥ̷̳̹͈ͥ͛ഩգ͉ 7V ͅା̳ͥຈါ̦̜̹̽ȃոષ͈̭̥͂ͣȄKG-7 ́ٳ อ̱̹ഩႁଷࢄٝႹͬঀဥ̱ഩգͬ 7V ͅା̱Ȅ̥̾ ഩႁͬ࢘ၚഎͅރݯ̳̭̱̹ͥ͂͂ȃ ̭͈̭͂ͤ͢ͅഩႁͬ࢘ၚഎͅ၌ဥ̳̭̦ͥ͂خෝ ̹͂̈́̽ȃ̭̭́ঀဥ̱̹ΑΞΛίΘ;ϋϋΨȜΗ ͉ζ΅ΏθȆͼϋΞΈτȜΞΛΡȆίυΘ·Μ২ୋ͈ MAX2887 ̜́ͥɦ 2ȃ MAX2887 ͉වႁশ͈ 5.6 V ̥ͣ 35 V ͈ഩգͬႁশ ͅ 2.36 V ̥ͣ 35 V ͅାخෝ̈́ഩঊ໐̜́ͥȪडఱ ႁ 711mAȄඤ໐ࢯ 1.5 ϮȫȃഩঊٝႹ͉ MAX2887 ͈ୋૂ༭ͅࠇश̯̞ͦ̀ͥٝႹͬ४ࣉ̱̹͂ȃٝ Ⴙ ͬ Fig.5 ͅ া ̳ ͜ ͈ ͂ ̱ ̹ȃMAX2887 ͈ IN ঊ ͂ GND ঊ͈ۼͅ 23V ͈ഩգͬවႁ̱̹শͅȄVout͂ GNDঊۼ͈ഩգ̦ 7 V ̠̈́ͥ͢ͅخ་ࢯ R2͂ R3ͬା̱̹ȃ ഩঊٝႹ͈ܖโ͉ۜܖโͬحࢥ̱̀ैୋ̱Ȅഩঊ ໐̭ͬͦ৾ͤͅັ̫̹ȃ̭͈ഩգଷࢄ౾̥ͣႁ̳ ͥഩգͬͤ͢հރݯ̵̯̹ͥ͛Ȅैୋ̱̹ഩঊٝႹ͂ ΑΠυδ͈͂ۼͅഩܨඵਹϋΟϋ C4ͬ୪̱̹ȃ ۜܖโ͈حࢥैު͉ോఱڠࢥڠ໐ಎ؇ਠࢥા́ ɦ 2
Maxim Integrated Products.(3114). 35V, 711mA internal switch, 211% Duty Cycle, Step-Down Converter, 3:2-24.
Fig. 1. A shows the Stroboscope and B shows the Digital camera.
Fig. 2. Housing. A shows the front of the housing and B shows the back.
Fig. 3. Illustration showing digital camera housing. A shows the waterproofed box of the digital camera and B shows the waterproofed box of the electronic fl ash.
14 ോఱڠକॲڠ໐ܮါȁలĶĸےȪijııĹȫ
Fig. 4. Design of electronic circuit.
C1 and C2 show condensers of 100µF, C3 shows a condenser of
1F, R1 and R2 show variable condensers of 50kΩ, L shows a coil
of 4.7µH and D shows a shot-key diode, Vin and Vout show the
points were voltage was measured.
Fig. 5. Electronic circuit and battery holders with the housing.
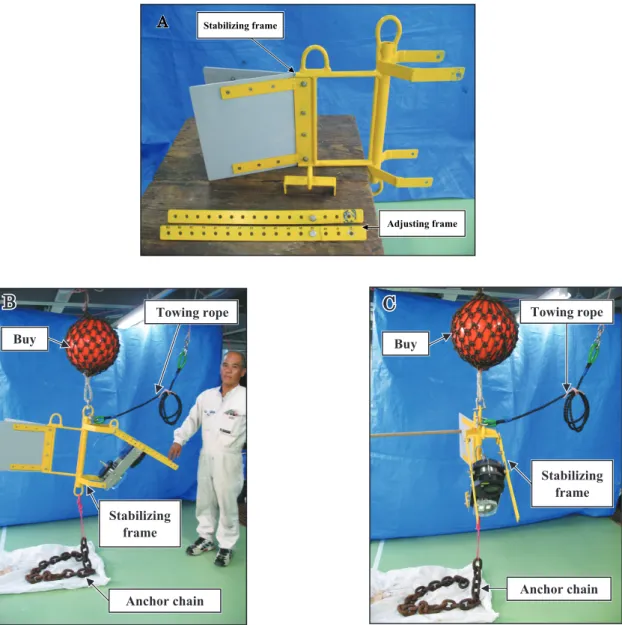
Fig. 6. Stabilizing towing device for underwater digital camera.
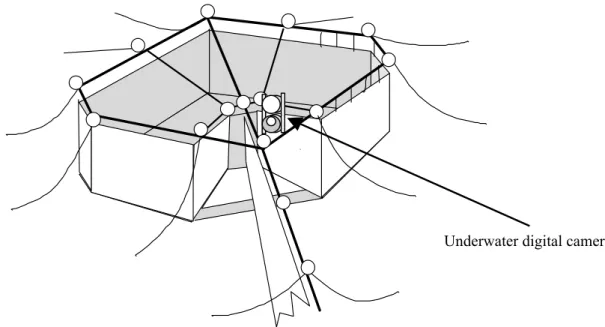
̤̭̹̈́̽ȃFig.6 ͅা̳̠͢ͅȄΑΠυδ͂ഩ౻γσ ΘȜ 9 ࡢ͈ۼͅഩঊٝႹͬ୪̱̹ȃْ௨ͬ Fig.6 ͅা ̳ȃ ज़גࡑ༞੩ܥऺ͈ٳอ KG-7 ̯̰ͬ̈́͘͘ज़גࡑͅ؊ဥ̳̹ͥ͛ज़גࡑ ಎ͈ KG-7 ͈պ౾ͬ༗̹͈̾͛ज़גࡑ༞੩ܥऺ͈ैୋ ̤̭̹ͬ̈́̽ȃഘȪ6 mm ȿ 61 mmȫȄΏλέΠȪ23 mmȫȄࣙۯȪ46 mmȫဣ୪حࢥ̱ܥऺષ໐ͅέυȜΠ୪ ဥ͈ςϋΈȄئ໐ͅଞ୪ဥ͈ςϋΈ̤͍͢ΨρϋΑ ାဥ͈ထςϋΈͬဣ୪̱̹ȃႯਠ͈́ה͈࣎षȄ KG-7 ͈ΨρϋΑͬհ̵̯̹ͥ͛ΫโȪ6 mm ȿ 411 mm ȿ 411 mmȫ́ैୋ̱̹ 3 ཿ͈ૺႹה့࣎ͬ 41ɋͅ ା̱৾ͤັ̫̹ȃज़גࡑ̤̭̠ͬ̈́ष٬ೲ͈ࠁેͬ ࣉၪ̱̀ KG-7 ͈৾ͤັ̫ڙഽͬ 6ɋ͙࣫́ 96ɋ́͘ ା̧́ͥͺȜθͬैୋ̱̹ȃ༞੩ܥऺͬ Fig.7 ͈ Aͅা̳ȃܥऺ̥ͣ 3 m ͈պ౾ͅה࣎ဥυȜί͈ͤ͢ ࿗̱ͬ୪̱̹ȃ̭͉ͦה࣎ಎυȜί̦ͤ͢ͅවͥ͂ज़ גܥऺ͈ήτٝ͞ഢ̦̭̳̹̜̾̈́ͤͦͬٝͥ͛́ͅ ͥȃࡑܥऺ͈୨ͤၗ̱̦ယօͅြ̠ͥ͢ͅυȜί͈ ୶ͅͺͼͬैୋ̱ܥऺͅ୪̱̹ͤ͢࿗̱ͅࠒ̞̺ȃ ٬ೲ̥ͣ 3 ̥̉ͣ 4 ͈̯̉ࣞͬ༗̠̀ͥ͢ೄࠂ 461 mmȄਹၾ 5 Kg ͈έυȜΠ͂ਹၾ 22.6 Kg ͈ଞဥ͈ङ 4 ུ́ႁͬା̱̹ȃKG-7 ͈͂୪ͬ Fig.7 ͈ B ̤ ͍͢ C ͅা̳ȃ ज़גࡑ ٨ၻͬح̢̹ KG-7 ΏΑΞθ͈ΑΠυδෝບث̳ͥ ̹͛ͅΑΠυδ൲ैশۼͬݥ͛ͥࡑ̤̭̹ͬ̈́̽ȃ͘ ̹Ȅज़גࡑ༞੩ܥऺͬ KG-7 ৾ͤͅັ̫ࡑͅރ̳ͥ ̭̦͂خෝْ̈́௨̦ං̥ͣͦͥͬږ̳ͥࡑ̤̭͜ ̹̈́̽ȃ ΑΠυδ൲ैশۼ͈ບثࡑ͉ോࡇධ̯̾͘ঌ ͈༌׆ݽࢽؗͅ୭౾̱̹ޗ֗ਠဥ߿౾࿌ඤ̤̭́ ̹̈́̽ȃज़גΏΑΞθ͉ Fig.8 ͅা̳̠͢ͅ౾࿌ֵ࢛ વঊၔ௰͈٬ೲ߃̩৾ͤͅັ̫Ȅ࿌ඤͬٝဋ̳ͥݿ̤͢ ֵ͍࢛̥ͣ࿌ඤٸ͒ව࿌̳ͥݿͬज़גచય̱̹͂ȃո ஜ͈ٳอ͂ࣽٝ KG-7 ͈ΑΠυδഩ࡙ͅ٨ၻͬح̢̹͜ ͈͈ΑΠυδ͈൲ैশۼͬڛ̱̹ȃΟΐι͈Ⴒ̱ ْ̹௨ज़ג͈ۼڞͬ 71 ຟ͂ 231 ຟͅ୭̱̀Οΐι ͈ज़גخෝশۼ͂ΑΠυδ͈൲ैশۼͬݥ̹͛ȃ ٨ၻͬح̢̹ KG-7 ͅ༞੩ܥऺͬ৾ͤັ̫ज़גࡑͬ ̤̭̹̈́̽ȃോఱڠକॲڠ໐້௺Ⴏਠȶධି܃ȷ ̤͍͢ਢഀȶ̱͙ͣ̈́ȷ́ോსඤ̤̞̀ͅज़גࡑ ̤̭̹ͬ̈́̽ȃܥऺ֚ͬตͅ୭౾̯̞ͦ̀ͥυȜί ͂ࠒ̨٬ೲ̥ͣ 3 ̥̉ͣ 4 ͈̯̉ࣞͬ༗̱Ȅה̱࣎ ̦̈́ͣକ૬ 91 m ̥ͣ 311 ͈̉٬ೲັ߃ͬज़ג̱̹ȃ2 ͈ٝज़גࡑশۼ̦ 2 শۼஜࢃ͂ౣশۼ̜̹̹́̽͛ ज़גশۼۼڞͬ 6 ຟ̥ͣ 31 ຟͅ୭̱ȄΟΐιഩ࡙Ȇ ΑΠυδഩ࡙͂͜ͅဥਰഩ౻ȪDB-71ȫͬঀဥ̱̹ȃ ࠫض̤͍͢ࣉख़ ུࡑ́ං̹ͣͦΑΠυδঀဥশۼͬ Table 2 ͅȄ ࡑ́ංْ̹ͣͦ௨ͬ Fig.9 ̥ͣ Fig.22 ͅা̱̹ȃTable 2 ͉ΑΠυδอْ͈̞̈́௨̦ංͣͦই͈͛ͥ́͘শۼ͂ Οΐι̦൲ै̱̫̹শۼͬা̱̞̀ͥȃչͣ2) ͈ ज़גࡑࠫضͤ͢ΑΠυδ٨ၻոஜ͉Ⴒज़ג̦ 21 শ ۼ಼̢̜̹̥ͬͥͤͣତཿͅ 2 ཿഽ͈ڬࣣ́อ̦̈́ ̷̩͈̈́ͤອഽ̦௩̱Ȅडਞഎͅอ̦̩ۖ̈́̈́ͥͅȃ ࡔ֦̱͂̀ഩ࡙ഩգ̦੭șͅ၂̻̦̀͞ຈါഩႁͬྖ ̹̯̩̭̦̈́̈́ͥ͂ݷ̬ͣͦͥȃ୭̱̹ज़גশۼۼڞ ඤͅΑΠυδඤ͈ϋΟϋ͈͒ਰഩ̦ਰ̴̧́อ ٝତ̦ࡘઁ̱̹͈͂͜ࣉ̢ͣͦͥȃTable 2 ͤ͢ΑΠυ δͅഩႁଷࢄٝႹͬழ͙ࣺ͚ஜ͂ࢃ͉́ΑΠυδ͈อ ْ̦̞̈́௨̦ज़ג̯͈ͦͥ́͘শۼ̦։̞̈́̽̀ͥȃႲ ज़גۼڞ̦ 71 ຟ͉́٨ၻஜ͉ : শۼࢃ̥ͣ 21 শۼ ஜ́ΑΠυδ͈อْ̦̞̈́௨̦ංͣͦই̹̦͛Ȅ٨ ၻࢃ͉ 26 শۼ߃̩൲ै̦̱̹ȃ൳အͅႲज़גۼ ڞ̦ 231 ຟ́͜٨ၻஜ͉ 21 শۼஜ́ΑΠυδ͈อ ْ̦̞̈́௨̦ංͣͦই̹̦͛Ȅ٨ၻࢃ͉ 2: শۼոષ ൲ै̦̱̹ȃକಎ͉́ྶْ̈́௨͉ං̩̩ͣͦͅඅ ͅۼ͉̈́̓ΑΠυδ̦̩͉̈́̀ྶၸْ̈́௨͉ज़גະخ ̜́ͥȃFig.9 ͉౾࿌ඤ́ज़ג̯̹ͦ·υΆ̜́ͥȃ ྶၸْ̈́௨̦ං̭̦̭͈ͣͦͥ͂ࡑ́ږ̧̹́ȃུ ࡄݪͤ͢ KG-7 ́Οΐιဥͅٳอ̱̹ഩႁଷࢄٝႹ͉ ΑΠυδ͜ͅ؊ဥ̧́ఉ̩͈ྶၸ̈́ज़גْ௨̦ංͣͦͥ ̭̦͂ܢఞ̯ͦͥȃࣽࢃ͈ࡄݪهఴ̱͂̀ͤ͢հͅഩ ႁͬރݯ̳̹͈ͥ͛ఱယၾϋΟϋ͈ழ͙ࣺ͙͞ഩႁ ଷࢄٝႹ͈٨ၻ̦ݷ̬ͣͦͥȃ ज़גࡑ༞੩ܥऺͬঀဥ̱̹ࡑ́ංْ̹ͣͦ௨͈ ႕ͬ Fig.: ̥ͣ Fig.22 ͅা̳ȃධି܃͈́ה࣎ज़גࡑ ͉ज़גশۼۼڞ 31 ຟ̤̭̹́̈́̽ȃFig.: ͉٬ೲັ߃ͬ ח̪Ό࿒έΌش͈ಏۼ̜́ͥ͂ࣉ̢ͣͦͥȃ ;ΛςΌ̜́ͥخෝْ̦̞̦̭͈ࣞ௨͈̥͉ͣ ౯̧̞́̈́ȃFig.21 ͈ئ༷͈͉ࡔ॑൲͈σΩ ͈Ⴒङࡢఘ̱̩͉͜·ρΊ͈ಏۼ͈خෝ̦̜ͥȃ̭͈ ͉କಎ́༛ڕ̱̀ષͅષ̦ͥஜͅΨρΨρ͂̈́ͤ ࡓ͈ࡔ߿ͬၣ̞̹͛̈́͛ח̞̞́ͥউͬږْ̧́ͥ௨ ͉ܲਹ̜́ͥȃ̱͙͈ͣ̈́́ה࣎ज़גࡑ͉ज़גশۼۼ ڞ 21 ຟ̤̭̹́̈́̽ȃFig.22 ͉٬ೲͅ୭౾̯̹ͦݽઞ ͂ݽઞඤͬٝဋ̳ͥݿْ͈௨̜́ͥȃංْ̹ͣͦ௨̥ͣȄ ה࣎ज़גࡑဥܕऺͬ৾ͤັ̫̹ KG-7 ́٬ಎ͈͞ ࢹ௮ͬज़ג̧̭̦́ͥ͂ږ̯̹ͦȃུࡄݪ́ैୋ̱
16 ോఱڠକॲڠ໐ܮါȁలĶĸےȪijııĹȫ
Fig. 7. Position of underwater digital camera and housing on a“Kago-type”set-net.
Fig. 8. Photograph of Black-tipped (Gerr oyena) in the set-net. Fig. 9. Photograph of Scorpionfi sh (Sebastiscus tertius) in the sea bottom. ̹ה࣎ज़גࡑဥܕऺ͉ KG-7 ͈ΨρϋΑͬհ̵̯ྶ ၸْ̈́௨ज़גͬخෝ̳̭̦ͥ͂ͅږ̯̹ͦȃ ৫ৃ ུࡄݪͬૺ̜̹̤͛ͥͤͅଲდ̹༷̈́̽ͅș̭͈ͅા ̤ͬৰ̱ͤ̀ࢄႛ૭̱ષ̬̳͘ȃज़גࡑ̮ͅފႁ̞̹ ̺̞̹ോఱڠକॲڠ໐້௺Ⴏਠȶධି܃ȷଽෝ ಿ͉̲͛ழ֥͈༷șȄज़גْ௨͈͈൳̤ͅႁ ̱̞̹̺̞̹ͬ̀ോఱڠକॲڠ໐௩ന֗ংޗȄ ૻൡ੩ޗȄအș̮̈́੩࡞୍ֳ̱̩̺̯̹֚ͬ̀̽੩ ޗۜͅ৫͈փͬນ̱̳͘ȃ̹͘Ȅਹါ̈́٨ၻത͈֚̾́ ̜ͥΟΐιഩ࡙͈ैୋ̮ͅފႁೀ̞̹ോఱڠࢥڠ ໐ಎఆგຳ֥ܿȄाུ໌ং֥͍ܿ̈́ͣͅज़ גࡑ̮ͅފႁೀ̞̹ോఱڠକॲڠ໐ܿ໐ઐ
Fig. 10. Photograph of Companion of Hoya suspended in the water. Fig. 11. Photograph of an underwater reef rocky area where fi sh live suspended in the water.
Table 1. Comparisons of duration times and fi rst stop time of fl ash used in the KG-6 strobe light
ܿಿȄாੳࢩྩ৽හȄಿડ֚ܿ৽හ̤͍͢ გฎ֥ܿۜͅ৫͈փͬນ̱̳͘ȃ ֨ဥࡃ 2ȫչཻȄ֔ષܔဢȄࡼോୃഓȪ3118ȫȅಿশۼज़גͅచ؊ ̱̹କಎΟΐΗσιρ KG-7 ͈ٳอ͂ෝບثȄକॲڠ໐ ܮါȄ67ȇ48-54