初期設計段階 多関節 最適 関節数 ン 長 軌 関 研究
Research on Optimum Number of Joints, Length of Links and Trajectory for Multi-Jointed Robot Arm at Initial Design Stage
2015 2
金紺 亨俊
Hyeongjun KIM
初期設計段階 多関節 最適 関節数 ン 長 軌 関 研究
Research on Optimum Number of Joints, Length of Links and Trajectory for Multi-Jointed Robot Arm at Initial Design Stage
2015 2
早稲 大学大学院紺 創造理工学研究科 総 機械工学専攻紺 最適 ン研究
金紺 亨俊
Hyeongjun 紺 KIM
I
目 次
第 1 章紺 序論 ... - 1 -
1. 1紺 研究背景 ... - 1 -
1. 1. 1紺 研究 問題 ... - 1 -
1. 1. 2紺 人間 腕 特性 ... - 2 -
1. 2紺 形状や軌 関 従来 研究 ... - 3 -
1. 2. 1紺 構造解析 設計 関 研究 ... - 4 -
1. 2. 2紺 経路 軌 設計 関 研究 ... - 5 -
1. 2. 3紺 冗長自 効 利用 関 研究 ... - 7 -
1. 2. 4紺 従来 関連研究 問題点 課題 ... - 8 -
1. 3紺 研究目的 ... - 9 -
1. 4紺 研究対象 研究方法 ... - 10 -
1. 4. 1紺 最適 対象 仮 ... - 10 -
1. 4. 2紺 研究方法 手 ... - 10 -
1. 4. 3紺 関節数 ン 長 軌 最適 手 ... - 11 -
1. 5紺 論文 構 ... - 12 -
第 2 章紺 多関節 解析手法 ... - 15 -
2. 1紺 概紺 要 ... - 15 -
2. 2紺 多関節 ... - 16 -
2. 2. 1紺 ン 表示 ... - 16 -
2. 2. 2紺 逆運動学解析 ... - 17 -
2. 2. 3紺 Jacobian行列 ... - 20 -
2. 2. 4紺 特異点 ... - 20 -
2. 2. 5紺 動力学解析 ... - 21 -
2. 3紺 最適 計画 ... - 23 -
2. 3. 1紺 冗長自 生 場 設計変数 ... - 23 -
2. 3. 2紺 3次Spline補間 用い 軌 計画 ... - 25 -
2. 3. 3紺 目的関数設 ... - 27 -
2. 4紺 遺伝的 (GA) 適用 ... - 28 -
2. 4. 1紺 遺伝的 原理 ... - 28 -
2. 4. 2紺 交 突然変異 選択 ... - 29 -
2. 4. 3紺 適用手 ... - 30 -
II
第 3 章紺 固 軌 条件 多関節 最適
関節数 ン 長 ... - 33 -
3. 1紺 概紺 要 ... - 33 -
3. 2紺 ... - 34 -
3. 2. 1紺 標変換行列 逆運動学解析 ... - 34 -
3. 2. 2紺 運動方程式 ... - 36 -
3. 3紺 冗長自 最適設計方法 ... - 37 -
3. 3. 1紺 関節角 設計変数表現 ... - 37 -
3. 3. 2紺 設計変数 含 軌 計画 ... - 38 -
3. 3. 3紺 最適 問題 式 ... - 39 -
3. 3. 4紺 最適 手 ... - 41 -
3. 4紺 最適 設計結果 ... - 44 -
3. 4. 1紺 Case 1 結果 ... - 45 -
3. 4. 2紺 Case 2 結果 ... - 46 -
3. 4. 3紺 Case 3 結果 ... - 47 -
3. 4. 4紺 各Case 角 角 関節 ... - 48 -
3. 4. 5紺 各Case 効果 Effect size ... - 51 -
3. 5紺 章 ... - 54 -
第 4 章 紺 初期設計段階 次元 面 多関節 関節数 ン 長 軌 最適 ... - 57 -
4. 1紺 概紺 要 ... - 57 -
4. 2紺 初期設計段階 最適 関節数 ン 長 軌 最適 手法 ... - 58 -
4. 2. 1紺 設計変数 ... - 59 -
4. 2. 2紺 目的関数設 ... - 61 -
4. 2. 3紺 最適 問題 式 ... - 62 -
4. 2. 4紺 最適 手法 ... - 63 -
4. 2. 5紺 多目的最適 手 ... - 64 -
4. 3紺 最適設計結果 ... - 66 -
4. 3. 1紺 単目的最適 問題 ... - 66 -
4. 3. 2紺 多目的最適 問題 ... - 66 -
4. 3. 3紺 単目的最適 多目的最適 結果 比較 ... - 67 -
4. 4紺 実験 検討 ... - 73 -
4. 4. 1紺 実験装置 ... - 73 -
4. 4. 2紺 実験方法 ... - 75 -
4. 4. 3紺 実験結果 ... - 77 -
III
4. 4. 4紺 実験結果 考察 ... - 81 -
4. 5紺 章 ... - 81 -
第 5 章 紺 3 次元空間 多関節 最適 関節数 ン 長 軌 最適 ... - 83 -
5. 1紺 概紺 紺 要 ... - 83 -
5. 2紺 3次元空間 ... - 84 -
5. 2. 1紺 運動方程式 ... - 84 -
5. 2. 2紺 冗長自 考慮 軌 計画 ... - 86 -
5. 3紺 最適 問題設 ... - 87 -
5. 3. 1紺 最適 問題 式 ... - 87 -
5. 3. 2紺 最適 手 ... - 87 -
5. 4紺 最適 結果 ... - 90 -
5. 5紺 実用問題 貢献 ... - 95 -
5. 6紺 章 ... - 95 -
第 6 章 結論 後 展望... - 97 -
6. 1紺 研究 結論 ... - 97 -
6. 2紺 後 展望 ... - 100 -
6. 2. 1紺 弾性体 仮 最適 ... - 100 -
6. 2. 2紺 作業 考慮 最適 ... - 101 -
6. 2. 3紺 問題 ... - 102 -
参考文献 ... - 103 -
謝紺 辞 ... - 109 -
研究業績 ... - 111 -
紺
IV
紺 紺
V
図 目 次
1 章
1. 1紺 産業用 例 ... - 2 -
1. 2紺 人体 黄金比 各種生物 腕 比率 ... - 3 -
1. 3紺 Zvi Shiller 最適 結果 ... - 4 -
1. 4紺 Indura Adji State-Value Function ... - 5 -
1. 5紺 白井 GA SA 利用 最適 手法 ... - 6 -
1. 6紺 人間 腕 自 ... - 7 -
1. 7紺 研究対象 概念 ... - 10 -
1. 8紺 論文 構 ... - 14 -
2 章
2. 1紺 運動学 逆運動学 ... - 16 -2. 2紺 Denavit-Hartenberg紺 ... - 17 -
2. 3紺 冗長 逆運動学 解 ... - 18 -
2. 4紺 PUMA型 4 解 ... - 19 -
2. 5紺 冗長 逆運動学 解 ... - 19 -
2. 6紺 特異点 置 い 例 ... - 21 -
2. 7紺 次元 ... - 22 -
2. 8紺 冗長自 生 場 設計変数 概略 ... - 24 -
2. 9紺 Spline補間 用い 軌 計画 概念 ... - 25 -
2. 10 交 Crossover 突然変異 Mutation 概念 ... - 29 -
2. 11紺 選択 ... - 30 -
2. 12紺 実 ン 例 ... - 31 -
3 章
3. 1紺 関節角計算例 概念 ... - 35 -3. 2紺 面剛体 ... - 37 -
3. 3紺 関節角計算例 概念 ... - 38 -
3. 4紺 軌 計画 概念 ... - 39 -
3. 5紺 計画 軌 目標点 ... - 39 -
VI
3. 6紺 制約条件 , 明 ... - 41 -
3. 7紺 最適 手 ... - 43 -
3. 8紺 各最適 結果 ... - 44 -
3. 9紺 Case1 軌 ... - 45 -
3. 10紺 Case2 軌 ... - 46 -
3. 11紺 Case3 軌 ... - 47 -
3. 12紺 Case1 角 角 関節 変 ... - 48 -
3. 13紺 Case2 角 角 関節 変 ... - 49 -
3. 14紺 Case3 角 角 関節 変 ... - 50 -
3. 15紺 各Case 効果 棒 ... - 53 -
3. 16紺 固 軌 搬送 適用例 ... - 55 -
4 章
4. 1紺 軌 計画 設計変数 表現 ... - 60 -4. 2紺 軌 最適 概念 ... - 60 -
4. 3紺 研究 意思決 方法 ... - 63 -
4. 4紺 多目的最適 手 ... - 65 -
4. 5紺 多目的最適 解 ... - 68 -
4. 6紺 可操作 比較 ... - 68 -
4. 7紺 初期値 単目的最適 多目的最適 各軌 ... - 69 -
4. 8紺 初期値 単目的最適 多目的最適 各角 変 ... - 70 -
4. 9紺 初期値 単目的最適 多目的最適 各角 変 ... - 71 -
4. 10紺 初期値 単目的最適 多目的最適 各関節 変 ... - 72 -
4. 11紺 実験装置 概略 ... - 73 -
4. 12紺 実 製作 実験 ... - 73 -
4. 13紺 角 P制御 線 ... - 74 -
4. 14紺 計測系 概略 ... - 75 -
4. 15紺 力や摩 影響 最 環境設 ... - 76 -
4. 16紺 挙動 ... - 78 -
4. 17紺 初期 電 電流 電力 ... - 79 -
4. 18紺 最適 電 電流 電力 ... - 80 -
4. 19紺 軌 最適 含 初期設計段階 搬送 適用例 ... - 82 -
VII
5 章
5. 1紺 次元 ... - 85 -
5. 2紺 次元空間 軌 計画方法 ... - 86 -
5. 3紺 次元 最適 手 ... - 89 -
5. 4紺 初期 軌 ... - 91 -
5. 5紺 最適 軌 ... - 92 -
5. 6紺 各場 角 変 ... - 93 -
5. 7紺 各場 関節 変 ... - 94 -
5. 8紺 溶接 適用例 ... - 95 -
6 章
6. 1紺 弾性体 仮 ... - 100 -6. 2紺 剛体 ン 回転 ネ 弾性体 ... - 101 -
6. 3紺 作業 概念 ... - 101 - 紺
VIII
紺 紺
1. 1紺 研究背景
- 1 -
第 1 章 序論
1. 1 研究背景
1. 1. 1 ロボッ ア ム 研究 おける問題
産業用 1.1 う 方向 運動 い
水 方向 作業 搬送 適 い 通称SCARA Selective
Compliance Assembly Robot Arm 型 呼 水 多関節 あ
次元空間 運動 設置面積 対 広い作業範 確保 自動車 組 立 複雑 作業 通称PUMA型 呼
垂直多関節 あ 水 多関節 共 表的
産業用 あ う 作業 適 性
断 選択 使用 い 軌 確性や
復性 要 性能 要求 生産 減 要 目標
要求 従 軌 最適 確性や 復
性 高 形状最適 軽 消費 ネ
減少 研究 数多 行わ
う 研究 既 性能 改善
活用 初期設計 段階 関節数や ン 長
決 研究 異 比較的単純 作業 面
場 関節数や ン 長 関 作業 可能 最 限 関節数や ン 長 い 十 考察 い 経験的 決 い 既 装置 用い
い 理 既 装置 使用 安易 あ 装置
改良 試 場 関節数 増加 数 増え
初期設備費用 高 点 関節数 作業空間 次元 超え
発生 冗長自 制御 複雑 考え
- 2 -
言い換え 従来 性能 改良 研究 関節数
等 決 既 性能 改善 いう利点 あ
初期設計段階 設計 関節数や ン 長 決
根 的 問題 変 発生 影響 関 議論
十 行わ 決 関節数 条件 最適 行う
い 現状 あ
理 関節数や ン 長 初期設計段階 決
作業 容いわゆ 軌 影響 大 関節数や ン 長
変 計画 軌 変更 い い い 互い
影響 初期環境条件 仮 解 あ 挙
う 問題 解決 最適 関節数 ン 長 数理計画法
解い 複数 最適解 いわゆ 多峰性 求
解 局 的 最適解 あ 最適 問題 設計変数 自然 数 実数両方 考慮 い い い 最適 手法 選択 要 問題 考 え
(a) 菱電機 型水 多関節 紺 紺 紺 紺 紺 (b) 菱電機MELFA RV-F
1. 1紺 産業用 例[1]
1. 1. 2 人間 腕 特性
人間 腕 観察 2 特徴 持 い
1 人間 腕 冗長自 持 い 人間 冗長自 う
利用 害物 避 目標支点 到 状況 わ
運動 怪 自 1 失 最 限 運動 確保
特徴 あ [2] 人間 冗長自 発生 複雑性 利用
目標 学習 結果 直観的 腕 動
う一 特徴 人間 腕 1.2 う 各関節 一 比率 持
1. 2紺 形状や軌 関 従来 研究
- 3 -
あ え 腕 場 手首 手先 手首 比率
約 1:1.6 比率いわゆ 黄金比 持 指摘 い 一方 人間 腕
相当 生 物 腕 観察 環境 適 形
利用目的 わ 結果腕 比率 人間 腕 異 人間 生物 学的 似 い 類人猿 腕 人間 異 生態系 適 固 比率 持
人間 含 生 物 腕 環境や目的 適 比率 持
特徴 あ 作業目的 適 形 関節数 駆動方式 や 比率 ン 長 あ い 考え
特徴 い 明 い 経験や長い間 進 何
意味 周 環境 対 関節数や腕 長 適応あ い 最適
結果 推測 軌 関節数 ン 長
緊密 関係 あ い 考え 観察や考察 筆者
多関節 最適 関節数 ン 長 軌 注目 研究 進 動機
紺 紺
(a) 人体 比率[3] 紺 紺 (b) 多様 生物 腕 比率[4]
1. 2紺 人体 黄金比 各種生物 腕 比率
1. 2 ロボッ ア ム 形状や軌道 関 る従来 研究
制御 関 最適 研究 多 研究 直接
関連 い 形状や軌 関 最適 研究 多
い
- 4 -
最適 関節数 ン 長 軌 関連 従来 研究
構造解析 設計 関 研究
移動経路 軌 設計 関 研究
最適 関 研究 手法 体的 容 特徴
い 明 ~ 明 後
冗長性 効 利用 関 研究
各研究 問題点 組 課題 い 考え 設計 いう言葉 最適 含 総 的 意味 設計方法 使 い
1. 2. 1 ロボッ ア ム 構造解析 設計 関 る研究
形状 関 研究 Zvi Shiller[5] 各
関節 一 関節 加わ 条件 作業 間 最 最適 行 軌 わ 最適 ン 長 求 結果 1.3 う 根元
ン 長 短 結果 得 Zvi Shiller 各 ン 長 総和 値
一 条件 制作 変
全体 効率性 変 初期値 最適 結果 効性 比較 客観性 い 最適 行 対象 関節数 2 関節
関節数 ン 長 影響 明 考慮 条件 範 考え
室巻[6] 構造 振動 制御性能 評価 最適 動作指標 目的関数 扱い 最適形状 求
設計変数 関節数 固 各 ン 断面積 考慮 ン
長 触 い い 評価関数 一 あ 広範 わ
解 中 一 解 選択 困 あ
1. 3紺 Zvi Shiller 最適 結果[5]
1. 2紺 形状や軌 関 従来 研究
- 5 -
B.K.Rout[7] 最適 手法 GA 用い
ン 長や ン 質 最適 行 結果 解 大域的
最適 問題 い GA 用い 信 性 高い解 求 いう可能性 示
研究 関節数 固 前 行い関節数 変 影響 い 議論 い い
1. 2. 2 ロボッ ア ム 経路また 軌道設計 関 る研究
最適 軌 関 研究 害物回避 問題 解決
研究 多い 毛利[8] 作業空間 手先 侵入 い
空間 場 禁 空間 近似 手先 領
域 避 目標点 届 経路 ン 方法[9]~[10]
索 得 経路 間 関数 軌 変換 あ
作業 間 短縮 手法 示
[11] 各 ン 線 表 毛利 研究
全体 害物回避 拡張 研究 間短縮
各関節 駆動力 制約 行わ 作業 間短縮 結
果 駆動力 制約 大 依 う 予想 固
空間経路 軌 対 作業 間 最 行 経路 最適 性 考慮
尾崎 [12]多関節 各関節角 B ン関数 利用 近似 軌 滑 示 評価関数 害物回避
関数 付 線形和 評価関数 軌 最適 行 方法 滑
軌 計画 B ン 制御点 関節空間
え 設計者 実空間 害物 配置等 容易 考慮 い状態 B
1. 4紺 Indura Adji State-Value Function[11]
- 6 -
ン 制御点 置 決 い 幾何学的運動学 利用 動力学的要素 考慮 い い 多関節
対象 い 冗長自 効 利用 い 触
い い
山 [13] GA 用い い 初期軌 決 傾斜 用い 数理計画法 用い 消費 間 最 行う手法 示 方法
研究 使用 動力学 考慮 最短 間軌 設計 理 最短 間 駆動力 関 制約条件 大 影響 い 形
い
Indura Adji[14] ン 長 一 仮 作業 間 最
1.4 う 手先 軌 State-Value Function 表
最適 行 Nicolas Schmit [15] 3関節 対 消
費 最 軌 最適 行 S. Mahalakshmi[16] 作
業 間 消費 最 多目的最適 問題 考え Spline補間 軌 作 方法 示
研究 関節数や ン 長 変 最適 軌 影響 い 一 考慮 い い
一方 軌 や形状 最適 研究 あ Lee[17]
1. 5紺 白井 GA SA 利用 最適 手法[18]紺
1. 2紺 形状や軌 関 従来 研究
- 7 -
軌 形状 作業 間 最適 行い 消費 ネ 軌 偏差 作業 間 最 最適 問題 考え
結果 各目的関数 間 互い 関係 あ 確
解 求 白井[18] 可変長 最
適 軌 求 GA SA Simulated Annealing) 利用 1.5
う 最適 手法 案 作業 間 軌 偏差 最
最適 問題 考え 結果 ン 長 変 作業 間 短 縮 面 効 いう結果 得
軌 や形状 最適 研究 関節数 変 最適構造 軌 い 考慮 い い
1. 2. 3 冗長自由 有効 利用 関 る研究
人間 腕 1.6 う 7自 持 3次元空間 6自 対 一
自 余 い う 作業空間 次元 持
い 自 数 多 自 持 場 冗長性
あ い 冗長自 持 言わ う 冗長自
効 利用 研究 活発 行わ い
冗長自 い 害物 回避 目標 到着 い場
あ 冗長自 活用 回避 場 あ
場 各自 解析 優先 軌 計画問題 評価方法 い 考慮 必要 考慮 害物回避 利用 関 研究 行 わ [19]~[24]
1. 6紺 人間 腕 自
- 8 -
2.3.3 節 詳 明 可操作 評価関数 冗長自
特異姿勢回避 利用 研究 行わ [25]~[27]
冗長自 持 各関節 消
費 ネ 最適 関節あ 必要 減少
加 動特性 改善 利用 関 研究 [28]~[31]
研究 単一評価関数 効性 扱
実 性能 表 複数 評価関数 い 考慮 い
い 評価関数 入 実 近い最
適 創 一般的 最適解 得 考え
1. 2. 4 従来 関連研究 おける問題点および課題
述 1.2.1節 構造解析 設計 関 従来 研究
関節 や作業 間 評価関数 扱
ン 長 断面積 最適 初期
設計 段階 論議 必要 あ 関節数 冗長性 関 全 議論 行わ い い
1.2.2 節 経路 軌 設計 関 従来 研究
い 方法 軌 一 複数 う 評
価関数 用い 中 一 経路 軌 選ぶ 常 問題 あ
言え 冗長自 持 い 駆動力 動
作 間 直接性能 関わ 評価関数 考慮 い い場 多 冗長自 効 利用 い 議論 い い
従来 問題点 既 使用 前 関節
数 固 条件 最適 実行 研究 あ 冗長性 利点 い 考慮 い い 初期設計 段階 関節数 ン 長 等 決 問題 対 全 扱わ い い
研究 い い 要 考え 初期設計 段 階 関節数 ン 長 軌 冗長性 互い え 影響 明
最適 関節数 ン 長 軌 求 必要 あ
3関節 場 発生 冗長自 問題
軌 計画方法 問題
目標 適応 総 的 目的関数 設 問題 考え 新 い最適設計問題 設 汎用性 あ 解法 要 あ 紺 従来 研究 固 関節数 条件 最適 行い 関節数 直接設計変数 扱 研究 い 理 関節数 自然数 あ
1. 3紺 研究目的
- 9 -
面 ン 長や関節角 実数 両方 考慮 最適 手法
必要 加え 最適 関節数 ン 長 軌
満足 最適 問題 解 多 局 的 最適解 いわ ゆ 多峰性 問題 含 中 大局的 最適解 選択 望
紺 最適 関節数 ン 長 軌 索 最適 手法
整数 実数 混 問題 多点 索 必要 問題 多峰性 問題
適 手法 選択 要 問題
紺 従来 数理計画法 問題 対 適 手法 創発
的 手法 あ 遺伝的 GA 活用 必要
1. 3 研究目的
研究 SCARA 型 PUMA 型 い 単純 2 ン 剛
体 多関節 剛体 初期設計段階 関
節数 ン 長 決 後 詳細設計 段階 活用 汎用 性 あ 設計方法 示 結果 基 い 例示的 設計
検討 加え 併 実用的 効 示 目的
体的 関節数 ン 長 軌 え 影響
明
最適 決 行う
冗長自 活用 問題 軌 計画方法 問題
害物 作業環境 適応 総 的 目
的関数 設 問題
解決 最適 関節数や ン 長 影響 え 種
類や駆動方式 駆動 想 数 対応 質 考慮
運動方程式 計算 間接的 映 方法 便宜的
示 設計手法 詳細設計 後 設計段階 体的 最適 問題 対応 示 述 課題 解決 設計手法 数値計算
例 示 示 手法 実 搬送 既 産業用
適用可能 面 効 簡単 例 基 検討
- 10 -
1. 4 研究対象 研究方法
1. 4. 1 最適化対象 仮定
紺 多関節 剛体 対象 始点 終点 面
次元運動や 次元空間 運動 考え わ 1.7 う 任意 A B 点間 移動 想
駆動 各関節 直接設置 駆動方式
や 駆動方式 多 駆動方式
ネ 消費 駆動方式 依 便宜的 各関節
直接設置 駆動方式 標準 考え
1. 4. 2 研究方法 手順
紺 初期設計段階 多関節 剛体 最適 関節数 ン 長 考え 要 あ 記1.3 目 関 次 う 方法
冗長自 関係紺
多関節 剛体 面運動 考え 3関節
冗長自 発生 冗長自 活用 各関節
角 設計変数
1. 7紺 研究対象 概念
1. 4紺 研究対象 研究方法
- 11 - 軌 関係
予備的 研究 始点 終点 表的 軌 想
主 研究 ン曲線 ン ン 設計変
数 軌 最適 最適軌 求 場 考え
紺 評価指標 目的関数 関係
最適軌 評価 評価指 種々考え 大局的 評価指標 一 あ 消費 ネ 特異点 回避 考え 可操作性 考え
紺 関係
簡単 関節部 駆動 方式 想
数 対応 質 考え 運動方程式 消費 ネ 計算 映
作業環境 空間 害物等 最終的 ン 長や ン 形状 最適 必要 考え 案 手法 関節数 決
作業環境 変 対応 設計手法 掲載 目的関数 作業 間 置決 確 等々 い い 考え
い 案 手法 関節数 決 考慮 う
多関節 剛体 面運動 場 い 研究 展開
解析 主体 研究 並行 一部 実験 行い 比較 試
3次元空間 運動 い 解析 拡張 検討 行う
1. 4. 3 関節数, ンク長,軌道 最適化 手順
紺 関節数 関 自然数 変数 え い 系 状態 決 い 1 関
節 開始 数 増加 限数 各関節数
逆運動学解析 動力学解析 行い 長や軌 最適 行い 目的関数
最適 最 関節数 選ぶ 軌 最適 い 軌 ン
関数 近似 ン ン 設計変数 扱い 最適軌
求 冗長自 発生 場 関 回転角 設計変
数 姿勢 決
最適 手法 1.2.4 言 整数 実数混 問題 多点 索必要 問題
多峰性 問題 適 点 考え 手法 研究 扱う
関節数 自然数 や ン 長や軌 実数 設計 変数 軌 設計 予備的 研究 多峰性 見
遺伝的 (Genetic Algorithm) 用 後遺伝的
い GA 簡略 使う 紺
- 12 -
GA 自然選択 Natural selection 適者生 Survival of the fittest
原則 立脚 簡素 最適 あ 最適 手法 多
用い い GA 一般的 最適 手法 異 特徴 大
う 四 程 あ う 特徴 非線形 問題 連 問題 解
全域的空間 場 使わ 研究 最適 手法
適 断 紺
媒 変数 Parameter 直接利用 媒 変数 集 Parameter set
使用 最適解 索
単点 Point 多点 Multi points 索方法 あ
付加的 知識 使用 適 性 利用
決 論的 確率的 Crossover or Mutation 使用
実行
多目的最適 い 解 求 解 中 適
解 求 方法
1. 5 本論文 構成
紺 論文 全6章 構 い 示
紺 第 1 章 序論 関節数や ン 長 軌 関係 い 研究背景や関連 従来 研究 課題 述 後 論文 目的 研究対 象 研究方法 い 明 最後 論文 構 示
紺 第 2 章 多関節 い 最適 関節数 ン 長 軌 最適 行う 後 章 使用 基礎的 解析方法 い
明 行う 剛体多関節 対象 GA 最適 行う
適用 対象 い 最適 問題
式 最適 義 必要 実用 目指 汎
用性 あ 設計方法 示 設計変数 制約条件 目的関数 選
択 適 必要 あ 章 多関節
最適 計画 GA 適用 実 最適
行う 使わ 理論 明
第 3 章 論文 中心 第 4 章 予備的 研究
面 運動 対象 い 面 表的 軌 想 い
わゆ 固 軌 対 研究 行う 多関節 固 軌
通 冗長自 関節 や加 動特性 改善 着目
消費 ネ 最 最適 行い 最適 関節数や ン 長 求
1. 5紺 論文 構
- 13 -
最後 構造 関節数 ン 長 軌 影響 把握
効果 概念 入 傾向 考察 実 使用 い
作業 い 実用性 高い い 言
第4章 論文 主要 研究 容 あ 固 軌 関節数や ン 長 直接的 影響 避 第 3 章 設計方法 拡張 面 軌 自体 変 軌 含 最適 問題 考え 後 詳細設計
段階 活用 汎用性 あ 手法 案 効性 検討
実験 行い 案 手法 効性 実用面 検証 前章
想 軌 え 軌 沿う 最適 関節数
ン 長 求 章 軌 知 設計変数 含 最適
行う 前章 結果 関節角 0 特異姿勢 結果 観
察 章 問題 防 目的関数 設 多目的最適 行
う 体的 多 最適 関節数 ン 長 加え 軌
最適 始点 終点 外 目標点 設計変数 設
Spline 補間 用い 軌 計画 特異点 回避 考慮 消費 ネ
最 可操作性 最大 最適 問題 式 手法 案
最適 問題 式 MOGA Multi-Object Genetic Algorithm 多目的
最適 行い Pareto解集 中一 解 選択 方法 示
実験 実施 実験的 最適 結果 検証 最後 実 作
業 想 面 章 得 果 活用 示
第5章 第3 4章 面 物体 対象 最適 行 対
通常 作業 多 見 次元空間 対
象 面 手法 発展 最適 行い 汎用性 あ 手法
案 果 検討 対象 次元 増え 標変換 関
複雑 計算 飛躍的 増え 前章 第 4 章 直 接 用 膨大 計算 間 要 実用的 い
効率的 最適 行う 目的関数 消費 ネ 一 限
わ 特異姿勢 防 制約条件 設 最適 問
題 案 得 果 実用面 資 示
第 6 章 得 果 基 い 論文 結論
後 展望 い 述 最後 研究 関連 後 研究 展望 示
研究 各章 構 ワ 1.8 記
- 14 - 1. 8紺 論文 構
2. 1紺 概紺 要
- 15 -
第 2 章
多関節ロボッ ア ム 解析手法
2. 1 概 要
紺 初期設計 段階 多関節 剛体 関節数 ン 長 軌 対象 汎用性 あ 最適設計法 示 対象
い 運動学解析や動力学解析 最適 問題 式
最適 設 必要
紺 運動学解析 先端 置情報 計算や特異姿
勢 解析方法 示 動力学解析 運動
方程式 義 各関節部 関節 計算 値 用い 評価関数 数値計算や個々 値 比較 可能 研究 最適 手法
あ GA 用い 最適 問題 式 方法 示 必要
紺 章
多関節 解析
最適 計画
遺伝的 GA 適用
最適 行う 使わ 理論 実 適用 方法 い 明
紺 多関節 運動学 次元空間 関節
数 個 仮 適用 ン 表示方法 示
冗長自 発生 関節角 Jacobian行列 特異点 い 考察や問
題点 述 後 動力学解析 行う 運動方程式 義 関節
式 出 紺
紺 最適 計画 前述 多関節
基 い 最適 問題 式 行う 研究 課題 あ 冗長自
- 16 -
関節角 問題 軌 計画問題 目的関数 適用方法 案 紺
紺 最後 遺伝的 GA 適用 GA 原理 ン
方法 い 検討 実 適用 い 考察
2. 2 多関節ロボッ ア ム モ 化
紺 運動学 Kinematics 固 基準 標系 い 間
関数 運動 幾何学的 解析 行う う 運動
学 空間移動 解析的 記述 特 手先 ン
置 姿勢 関係 間 関数 扱う あ 運動学 2.1 示 う 運動問題 逆運動学問題 2
紺 運動学 関節 標系 関節角 え 場 直交 標系 手先 置 計算 問題 あ 対 逆運動学問題 手
先 置 え 場 満足 各関節角 計算 問題
あ 運動学 関節 標系 直交 標系 変換 あ 逆運動 学 直交 標系 関節 標系 変換 言え 紺
紺 運動 逆運動学 繋 ン 概
念 基 い 多関節 適用 ン 表示 関節角
Jacobian行列 特異点 い 明 紺
紺
2. 1紺 運動学 逆運動学
2. 2. 1 ンク 表示
一般的 う 多関節 機構学的面 各 ン
い 四 値 記述 基準 ン 自体 記述 残 基
準 ン 接 ン 記述 値 利用
機構 義 規約 Denavit-Hartenberg表示法 呼 い 研究 3~5
2. 2紺 多関節
- 17 -
章 多関節 ン 表示法 Denavit-Hartenberg表示法 利
用 2.2 一般的 多関節 ン 系 表 い
, , 軸 1 単 , , 軸 単
あ ン 呼 , , , う 義
基準 測 距
回 測 間 角
基準 測 距
回 測 間 角
1 関節 基準 標 関節 標変換行列 紺 式(2.1) う 表
∙ ∙ 0 ∙
∙ ∙ ∙
0 0 0 1
(2.1)
標変換 式(2.2) う え
… (2.2)
2. 2紺 Denavit-Hartenberg紺 [32] 追加
2. 2. 2 逆運動学解析
逆運動学問題 端装置 置 方角 え 関節角
求 あ 逆運動学 問題 運動学 問題 う 簡単
い 逆運動学 連立方程式 非線形 形 あ 解 求 容
易 い 完全 解 求 い場 あ
- 18 -
2. 3紺 冗長 逆運動学 解
逆運動学 解 過程 直面 問題 いわゆ 冗
長性 解 複数 あ 例え 2.3 う 目標点
関節角 解 無数 解 数 関節数 決
ン , , 関係 あ 例え PUMA型
腕 あ 目標 到 解 あ 2.4 置
法角 持 う 手 置 四 解 示 い
解 い 最後 関節 返 可能性 あ 全体
的 一 目標 対 解 持 関節 限界範
解 中い 解 可能 あ 可能性 あ
一般的 0 い ン 多 目
標 到 方法 多 例え 回転 関節 持 い
考え う 表2.1 可能 解 数 ン 中 0 数
関係あ 示 い 0 い 多い 多 解
6自 完全 一般的 回転 関節 持 い 最大 16 個
解 [33]~[34]
表 2. 1紺 6自 逆問題解 数
Number of solutions
0 4
0 8
0 16
0 16
2. 2紺 多関節
- 19 -
複数 解 持 中 一 解 選択 い い問題 あ 一 解 選ぶ 考慮 選択 基準 設計者
異 例え 2.5 う A B 動 B-a
う B-b う 移動 面 理的 考え 研
究 例 移動 う 基準 目的関数 設 目的関数 最少 一 解 選択 う 目的関数 後 最適 問題 わ 用
2. 4紺 PUMA型 4 解[35]
2. 5紺 冗長 逆運動学 解
- 20 - 2. 2. 3 Jacobian行列紺
ン 微 多次元 形 あ 例え 個 関数 あ 個 立変数 関数 仮
, , … , , , , … , ,
⋮
, , … , ,
(2.3)
う 微 微 関数 表
+ + ⋯ + +
+ + ⋯ + +
⋮
+ + ⋯ + +
(2.4) 式(2.4) 偏微 × 行列 ン J 義 両辺 間 微 割 式(2.5) う
(2.5)
あ 瞬間 X あ 値 持 う J(X) 線形変換 新 瞬
間 X 変 線形変換
ン 間 変 線形変換 言え 工学
一般的 関節 手先 直交 標系 表現
行列 あ 行列 数 直交 標空間 自 数 一 あ
2. 2. 4 特異点
関節 直交 標系 連結 線形変換 え 場
行列 逆行列 求 いう問題 あ 行列 非特異的
Non-singular あ 断 あ 行列 非特異的 あ 行列
逆 求 直交 標系 関節 変 率 計算
例え 直交 標系空間 中 え
2. 2紺 多関節
- 21 -
運動 い 仮 う 式(2.5) 使う 各瞬間 必要 関節角 変 率 計算
逆行列 無 関 根 的 質問 関節角 値 対
ン 逆行列 い あ 領域
? あ
ン 特異性 値 持 い う 置 特異点 いう 2.6 う 特異姿勢
直交 標空間 見 1 個 自 喪失
意味 直交 標空間 中 関節 変 率 う 選
択 動 い方向 空間 表 [32] 紺紺
特異姿勢 軌 計画 い 考慮 あ
要 問題 あ 研究 特異姿勢 避 方法 目的関数 設計条件 設 回避 う 考え い 紺紺
紺
2. 6紺 特異点 置 い 例紺
2. 2. 5 動力学解析
研究 多関節 面や空間 運動 剛体 扱
う 2.7 次元 表 場 示
関節数 各 ン 質 剛体 挙動 示 各関節部 質 回転運動 減衰 ネ 考慮 い 仮
各関節角 各 ン 長 各 ン 断面積 各 ン 任意
標点 あ 1, 1,
紺 全体 運動 ネ 全体 置 ネ 式(2.6), (2.7)
う 密 ン 任意 標点
関節部 あ
- 22 -
2. 7紺 次元
+
+ 1
2 1, 2, ⋯ ,
(2.6)
+
+
1, 2, ⋯ ,
(2.7)
紺 ン 方程式 入 式(2.8) う
2. 3紺 最適 計画
- 23 -
dtd + 1, 2, ⋯ , (2.8)
関節 あ 式(2.8) 式(2.9) う 簡略 運動方程 式
+ , + 1, 2, ⋯ ,
∙ + + { } 1, 2, ⋯ , (2.9)
紺 慣性行列 , 力 遠心力` 力
あ
研究 先 運動学解析 各関節 角 角 角加 計算 行い 式(2.9) 動力学解析 各関節部 関節 計算
最適 各部 関節 比較 可能 最適 関節
変 評価
研究 各 ン 細長い棒 関節部 集中質 持 仮 慣性行例 運動特性 い 考慮 い
2. 3 最適化モ 計画
1章 腕 最適 関節数 関節 長 軌 最適
考慮 い問題 い 明 設計変数設
軌 計画 目的関数設 問題 う 式 最適
研究 要 点 あ 3.4.5章 扱う最適 問
題 式 行う 必要 設計変数 設 軌 計画
目的関数設 い 明 章 異 条件
適用 向 一般的 明 詳細 適用 各節 再 論
2. 3. 1 冗長自由 が生 る場合 設計変数
関節数 作業空間 次元 超え 冗長自 発生
逆運動学 用い 関節角 求 い 研究 関節
角 1, 式(2.10) う 表 ≥ 設計変数 扱う
次元 場 4
- 24 -
2. 8紺 冗長自 生 場 設計変数 概略
+ + ⋯ + +
紺 紺 + + ⋯ +
⋮
+ + ⋯ +
(2.10)
関節角 , , 逆運動学 用い 式(2.11a), (2.11b), (2.11c) う 計算
紺 紺 紺 ,
,
, ,
, + ,
2 , 1
(2.11a) (2.11b) (2.11c)
, う
+ , (2.12)
, , , , , 2番目 ン 手先 標 あ , , , , , 計算
2. 3紺 最適 計画
- 25 -
ン 手先 標 , , , , , え 式(2.13a),
(2.13b), (2.13c) 1 ン 手先 標 , , , , , 計算
計算 繰 返 2番目 ン 手先 標 , , , , , 求
, ,
, ,
, ,
(2.13a) (2.13b) (2.13c)
わ 姿勢 表 関節 , , ⋯ , 求
2.8 概略 示 い
2. 3. 2 3次Spline補間を用いた軌道計画
軌 2.9 う 始点 終点 含 個 ン ン
, , ⋯ , , え 各 ン ン 当 各関節角
式(2.14) う
,
,
⋮, ,
,
⋮, ,
⋯⋯
⋯⋮
, ,⋮
,
,
⋮, ,
紺
, , ⋯ , , 1, 1,
紺 紺
紺
(2.14)紺
, 任意 関節角 あ , 次 Spline 補間
用い 間 関数 各関節 軌 Θ 求
2. 9紺 Spline補間 用い 軌 計画 概念
- 26 -
3次Spline 用い 理 明 2次Spline 最初 2 目標
点 繋 線 直線 点 最後 区間 大 振動 可能性 あ
あ 4 次 高次 Spline 高次多 式 持 安 性
章 3次Spline 用い
各関節 軌 Θ 1, 式(2.15) う 義
Θ , + , , + , , + , ,
1, 1,
(2.15) 各 数 , , , , , , , う
, , , … , ,
, , ,
, , ,
3 ,
, , ,
,
3 2, , + , 1, 1,
(2.16) (2.17) (2.18) (2.19)
, 式(2.20) う 表示 い い 0 あ
,
,
⋮, ,
, 1
,
2 , + ,
,
,
2 , + ,
,1
0
3 , , , , , ,
⋮
3 , , , , , ,
0
1, 1,
(2.20)
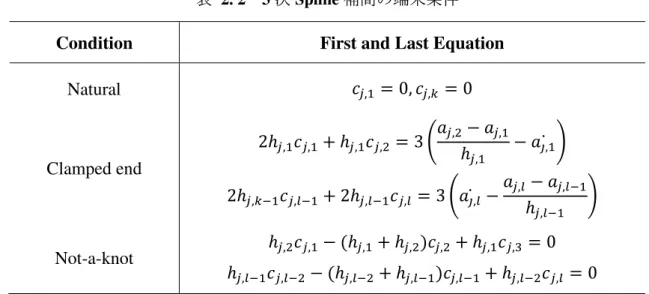
3次Spline補間 一般的 端 条件 あ 表2.2 各端 条件 示
あ 章 , 0, , 0 Natural condition 用い 理
Clamped end condition 曲線 最初 最後 関数 0 補間 曲線
最初 最後 比 仮想 目標点 漸近 あ
Not-a-knot condition 3次 関数 繋 端 条件 持 い 多
い曲率 持 [36]~[38]
2. 3紺 最適 計画
- 27 -
表 2. 2紺 3次Spline補間 端 条件
Condition First and Last Equation
Natural , 0, , 0
Clamped end
2 , , + , , 3 , ,
, ,
2 , , + 2 , , 3 , , ,
,
Not-a-knot , , , + , , + , , 0
, , , + , , + , , 0
2. 3. 3 目的関数設定
初期設計 段階 関節数や ン 長 あ 決 う
目的関数 評価指標 選択 大い 議論 あ あ 考え 初期設計 詳細設計 段階 体的 い 目的関数
考え 大局的 目的関数 選択
関節数 決 後 詳細設計 段階 個々目的関数 対 示 手法 対応 考え方
目的関数 汎用 考慮 消費 ネ 可操作 多目的最
適 行う 消費 ネ 始点 終点
動 各 ン 運動 ネ や 置 ネ 足 値 考え 式
(2.21) う 表
∙ + + 1, 2, ⋯ ,
(2.21)
紺 可操作 次元 自 持 考え
姿勢 表 関節 , , ⋯ ,
置 表 置 , , ⋯ ,
紺 紺 幾何学的関係 紺 紺 え
間変数 微 紺 紺 紺 ン行
列 あ 次式(2.23) え 紺 紺 可
操作 呼 操作能力 運動学的 観点 一 指標
[39] 可操作 最 値0 最大値1 持 最 値0 場 特異点 置 あ 最大値 1 場 作業空間 移動 容易 いう 示
- 28 -
最適 式(2.24) う 初期姿勢 可操作 最大 多様 作業環境 わ 関節数 ン 長 軌 最適 考え 紺
紺 紺 紺 紺 紺 紺 紺 紺 det ∙ (2.23)
det , ∙ , 紺紺
Where紺 , , , , , ⋯ , , 紺
(2.24)
2. 4 遺伝的ア ゴ ズム(GA) 適用
研究 最適 手法 あ 遺伝的 原理 述 あ 最適問題 実 適用 方法 い 検討
2. 4. 1 遺伝的ア ゴ ズム 原理
自然 A ン T ン G ン C ン いう
4種類 塩基 個体 情報 表 一般的 GA 個体 情報 0 1
表 形 蓄え う 蓄え
場 遺伝的 Locos 遺伝子 蓄え 対立遺伝子
Allele いう 対立遺伝子 複数並 列 色体 Chromosome い
う GA 色体 情報 入 文 列 String 直 表
方法 2 方法 使わ
― ン Binary coding [40]
紺 実数値 色体 , , ⋯ 次 関係 あ
+ 2 1 2 ∈ {0,1} (2.24)
遺伝子 数 , ン 範 あ , , ⋯ 紺
う 遺伝子 構 や 配列 遺伝子型 Genotype 実数値 う 色
体 情報 基 い 個体 特性 表現 表現型 Phenotype
いう 例え 色体 0 場 最 値 色体
1 人や 最大値 結局 式(2.24) ン 2 進数表記 10進数表記 変換 ン 範 中 修 一
あ ― ン ン 壁 Hamming cliff
呼 問題 あ 単 変わ 全 異 形態 色体
2. 4紺 遺伝的 (GA) 適用
- 29 -
作 連 性 生 あ 一般的 う 連 性
最適 行 う 問題 発生 考え 近接 色体
連 性 防 考案 次 ン あ
ン Gray coding
ン ン 壁 言わ 問題 持 い
解消 ン いう手法 使わ 表
現型 隣 わ 数 遺伝子型 隣 わ う
ン 修 あ 紺
ン 実数値 色体 , , ⋯ 関係 式(2.25)
う
+ 2 1 ⨁ 2 ∈ {0,1} (2.25)
式() 中 ⨁ 加え 値 2
残 示 演算子 ン 壁 紺
紺
2. 4. 2 交叉,突然変異,選択
GA 交 Crossover 突然変異 Mutation 呼 操作 行 次
世 作 交 突然変異 概念 2.10 示 い 交 複数 親子体 用い 行わ 各親子体 持 い 対立遺伝子 交 率 親 交換 交 方法 一点交 点交 方法 案 い お41が
~お43が
2. 10 交 Crossover 突然変異 Mutation 概念
- 30 -
自然界 親世 次 世 色体 々発生
現象 突然変異 いう う 起 確率 突然変異率 い う
GA 交 主要 遺伝子 突然変異 補助的 遺伝子
使用 理 最適 行う過程 突然変異 い場 親世 色体 色体 束 結果交 意味
う 問題 解消 突然変異 いう概念 GA 必要
紺 最適 個体 次 世 生 後 選択 いう操作 行わ
環境 適 個体 次 世 残 次 世 親個体 う
選択 1 章 前述 ン 適者生 原理 立脚 行わ 選 択 方法 選択 確率的 ン 選択 ン ン 選択
様々 方法 あ [44]~[46] 選択 い 扱う 紺 選択 現 個体群 優 個体 選択 方法
利用 2.11 う 環境 適 計算 選
択確率 選択 い 紺
適 高い個体 生 残 次 世 遺伝子 残 [47]
2. 11紺 選択
2. 4. 3 適用手順 Step 1)紺 遺伝子型決
案 GA 適用 各設計変数 2.12 う
ン 用い 色体 変換 色体 各
2. 4紺 遺伝的 (GA) 適用
- 31 -
ン 長 関節角 中間目標点 情報 含 い 中間目標点 最適 問題 省略 3章 最適 問題
2. 12紺 実 ン 例
Step 2)紺 初期遺伝子 個体群決
紺 Step 1) 決 遺伝子型 要素 う様々 個体 発生 個体 数
問題 易 や性質 依 一般的 数十個 発生 少 並列的処理 特徴 遺伝子 長 発揮 い い 逆 多 一世 あ 演算 増え 無駄 計算
多
Step 3)紺 各個体 適応 評価
遺伝子 適応 非常 要 概念 各個
体 適応 前 決 方法 演算 集団中 前 決 基準
満足 個体 無 個体 あ 終了 う い場
次 段階 行 Step 4)紺 選択
紺 Step 3) 決 適応 基 い 次 段階 交 行う個体 生
決 Step 5)紺 交
紺 色体 間 遺伝子 交 率 新 い個体 発生 Step 6)紺 突然変異
紺 遺伝子 部 値 強制的 変え 遺伝子集団 多様性 大 う 良い解 持 個体 発生 期
- 32 -
あ 突然変異率 大 悪い方向 向 う変異
確率 大 解 求
Step 7)紺 繰 返
紺 Step 3) 戻 各個体 適応 評価
3. 1紺 概紺 要
- 33 -
第 3 章
固定軌道条件 多関節ロボッ ア ム 最適 関節数 ンク長
3. 1 概 要
多関節剛体 最適 関節数や ン 長 初期設計
段階 設計 い あ 理 関節数や ン
長 軌 関節角 緊密関係 あ 関節角 計算 非線形 連立方程式 解 い い や作業 容 作業空間 制御方法 多 要因 関係 あ あ [48]~[50] 章
予備的 研究 単純
面 運動
冗長自 消費 ネ 減少 着目 評価関数 消費 ネ
既 軌 え 最適 関節や ン 長 求 仮 最適 関節数 ン 長 軌 関係 析
紺 仮 軌 え 最適 ン 長 求 従来
研究 あ 軌 最適 関節数 ン 長 傾向 把握
型的 軌 え 各軌 最適
結果 考察
紺 章 多 最適 関節数や ン 長 求
軌 固 問題 単純 行う 単純 研究 方向性や傾向 運動特性や効果 析 把握 次章 研究 容 方向性
- 34 - 章 目的 あ
最適 行う 設計変数選択 軌 計画 解析方法
い 2章 論議 方法 基 詳細 い 各節 述 章 得 結果 効性 各種 観点 示
3. 2 ロボッ ア ム モ 化
次元 面 運動 対象 最適 行
う い 体的 明 標
変換行列 作 逆運動 関節角 求 方法 示 運
動方程式 式 関節 計算 動力学解析 行う 2章 論議 方法 適用 示
3. 2. 1 標変換行列 よる逆運動学解析
紺 Denavit-Hartenberg 記法 面 関節 ン
表3.1 う 表
表 3. 1紺 面 関節 ン
1 0 0 0
2 0 0
3 0 0
⋮ ⋮ ⋮ ⋮ ⋮
0 0
式(2.1) 標変換行列 式(3.1) う 得 全体 標変換 式(3.2) う 計算
3. 2紺
- 35 -
3. 1紺 関節角計算例 概念
0 00 0
0 0 1 0
0 0 0 1
,
00 0
0 0 1 0
0 0 0 1
00 0
0 0 1 0
0 0 0 1
, …
00 0
0 0 1 0
0 0 0 1
紺 紺 紺 紺 紺 紺 (3.1)紺
… (3.2)
紺 式(3.2) 数学的 解法 各関節角 求 関節数
3関節 冗長自 発生 研究 う 方法 関
節角 計算
2次元 面 多関節剛体 3.1 う 表
関節角 1, ≥ 中 式(3.3) う 表
+ + ⋯ + +
紺 紺 + + ⋯ +
⋮
+ + ⋯ +
(3.3)
3 ≥ 3 場 関節角 い 最適 問題 関係
- 36 -
あ 3.3 節 詳 明 関節角 , 逆運動学 用い 式(3.4a), (3.4b) う 計算
,
,
, + , 2 1
(3.4a) (3.4b)
, , , 2番目 ン 手先 標 あ , う
+ , (3.5)
, , , , 2番目 ン 手先 標 あ
3. 2. 2 運動方程式
章 3.2 う 多関節 2次元 面 運動 剛体 扱う 各 ン 質 剛体挙動 各関節部 質 , 面 回転運動 力 影響 減衰 ネ 置 ネ 解析 簡
略 考慮 い 仮 各関節角 各 ン 長
各 ン 断面積 各 ン 任意 標点 あ 1, 2, ⋯ , 紺
全体 運動 ネ 式(3.6) う 密
ン 任意 標点 関節部 あ
紺 紺 紺 紺 紺 紺 紺 +
+ 1
2 (3.6)
紺 ン 方程式 入 式(3.7) う 関節
あ ン ネ 総和 あ
式(3.7) 式(3.8) う 簡略 運動方程式 d
dt + 1, 2, ⋯ , (3.7)
3. 3紺 冗長自 最適設計方法
- 37 -
3. 2紺 面剛体
+ , 1, 2, ⋯ ,
∙ { } + { } 1, 2, ⋯ , (3.8)
J 慣性行列 , 力 遠心力 あ
3. 3 冗長自由 を有 るロボッ ア ム 最適設計
方法
3. 3. 1 関節角 設計変数表現
3.2.1節 述 う 面運動 関節数 3
冗長自 発生 逆運動学 用い 関節角 求 超越関数
非線形 連立方程式 解 い い 間や計算
必要 3関節 関節角 ≥ 3 設計変数 扱い , 逆運動学 用い 式(3.4a), (3.4b 計算 ≥ 3 い
式(3.3) 関 係 用 い 姿 勢 表 関 節
, , ⋯ , 求 概念 3.3 表
- 38 -
3. 3紺 関節角計算例 概念
3. 3. 2 設計変数を含めた軌道計画
章 直線運動 曲線運動 数回 方向転換運動 意 軌 え
3.4 う 始点 終点 含 5 中間点 , , , , 決
あ 式(3.8) う 各中間点 当 各関節角
紺 紺 紺
Θ , Θ , Θ ⋮,
Θ , Θ , Θ ⋮,
Θ , Θ , Θ ⋮,
Θ , Θ , Θ ⋮,
Θ , Θ , Θ ⋮,
, , , , , 1,
紺 紺
紺
(3.9)紺
3次Spline 補間 用い 間 関数 各関節 軌 求 紺
目標点 軌 多関節 関節数や動 特性 把
握 3.5 う 始点 終点 一 型的 軌 え Case
1 面 直線運動 Case 2 軸 方向 方向転換 い滑 曲線
運動 Case 3 軸 方向 数回方向 転換 運動 想 軌 あ
う 型的 軌 中間点 え 理 始点 終点 一
場 軌 複雑 関節数や ン 長 う変 確
あ
3. 3紺 冗長自 最適設計方法
- 39 -
3. 4紺 軌 計画 概念
(a) Case1 (b) Case2 (c) Case3
3. 5紺 計画 軌 目標点
3. 3. 3 最適化問題 定式化
各関節数 ン 長 軌 最適 最適設計問題 表3.2 う 式
設計変数 関節数紺 各 ン 長 3 関節 場 , , ⋯ ,
≥ 3 加わ 式(3.10) う 紺
- 40 -
表 3. 2紺 最適 問題 式
Design variable 設計変数
, , ⋯
, , , ⋯
3関節 場
Objective function to be minimized 最 目的関数
Driving energy:
⇒ Min
Constraints
制約条件 , , ⋯ > 0
+ + + ⋯ +
+ + ⋯ + ≥ ,
紺 紺 紺
,
⋮, ,
,
⋮, ,
,
⋮, ,
,
⋮, ,
,
⋮, ,
, , , , , 1,
紺 紺
紺
(3.10)紺 目的関数 冗長自 利点 あ 消費 ネ 減少 注目 消費 ネ
目的関数 設 最 行う 消費 ネ
始点 終点 動 各 ン 運動 ネ 加算 値 考え 式(3.11) う 表
∙ + 1,
(3.11)
制約条件 各 ン 長 ン 長 変 増減
防 ン 長 総和 一 条件 関節数 変
目的関数 影響 考慮 関節部 質 制限 い紺紺
3. 3紺 冗長自 最適設計方法
- 41 - 紺
3. 6紺 制約条件 , 明
条件 中 各 ン 長や関節数 変 確 , 3.6 示 う 原点 え 各目標点紺 紺 紺 1紺番目 ン 距 表
3 関節 場 冗長自 逆運動学 用い 角 求
2紺個 知数 生 紺
3関節 場 各紺 紺当 2個 角 設計変数
2紺個 紺 , 紺制約条件 必要 え 5 関節 場 冗
長自 3 設計変数 数 , , , , 紺 5個 15
個 総20個 制約条件 紺 , , , , 0紺 5個 + + + +
紺 1個 , 紺 15個 総21個 紺 3. 3. 4 最適化手順
紺 3.7 研究 最適 手 示 概略 う 関節数 ン 長 軌 初期値 設
初期値 決 後 逆運動学 用い 各目標点 角 求
求 各目標点 角 Spline 補間 各 ン 角 求
動力学解析 行い 目的関数 計算 消費 ネ 最
GA 最適 行う ネ 最 値 関節数
+ 1 戻 う い場 設計変数 変え
戻
- 42 -
3 場 設計変数 加え
終了
関節数 1 ~ 中 目的関数 最 選ぶ
3. 3紺 冗長自 最適設計方法
- 43 - 3. 7紺 最適 手
- 44 -
3. 4 最適化設計結果
想 軌 対 最適 関節数や ン 長 求 GA 基 い
販最適 (modeFrontier) 利用 水 面 2 関節 5 関節
最適 行 生 世 数 1000 世 交 選択 突然変異 適用率 0.5 0.05 0.1 あ 各初期 値 卓 用 想 2, 0.25 , 0.25 ,
12 × 10 , 2700 kg/ 体積 密 各 ン 質
1, 2, ⋯ , 計 算 各 関 節 部 質 紺 1, 2, ⋯ ,
0.29[kg] 一 値 あ
結果 3.8 う 世 経過 目的関数 束 最適 解 求 詳細 容 各Case 示 最後 角 角 関 節 変 3.12 3.13 3.14 示
(a) Case1
(b) Case2 (c) Case3
3. 8紺 各最適 結果
3. 4紺 最適 設計結果
- 45 - 3. 4. 1 Case 1 結果
Case 1 最適 結果 3.9 う 最適関節数 初期値 2 最適
3 3関節 ン 長 , , 0.21, 0.24, 0.05[m]
消費 ネ 2.97[× 10 ] 2.63[× 10 ] 約
11[%]減少 各関節数 対 最適 結果 表3.3 示
(a) 最適 前紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 (b) 最適 後 3. 9紺 Case1 軌
紺
表 3. 3紺 Case1 最適 結果
設計 Initial n=2 n =3 n =4 n =5
0.25 0.2 0.21 0.19 0.17
0.25 0.3 0.24 0.11 0.1
- - 0.05 0.15 0.08
- - - 0.05 0.1
- - - - 0.05
Driving Energy × 10 2.97 2.86 2.63 2.98 4.03
Rate of change [%] -3.8 -11.5 0.3 35.8
- 46 - 3. 4. 2 Case 2 結果
紺 Case 2 最適 結果 3.10 う 最適関節数 初期値 2 最適
4 4関節 ン 長 , , , 0.12, 0.15, 0.06, 0.12
[m] 消費 ネ 7.01[× 10 ] 5.44[× 10 ]
約22[%]減少 各関節数 対 最適 結果 表3.4 示
(a) 最適 前紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 (b) 最適 後 3. 10紺 Case2 軌
表 3. 4紺 Case2 最適 結果
設計 Initial n=2 n =3 n =4 n =5
0.25 0.29 0.23 0.12 0.18
0.25 0.21 0.22 0.15 0.17
- - 0.05 0.11 0.05
- - - 0.12 0.05
- - - - 0.05
Driving Energy × 10 7.01 6.95 6.57 5.44 9.98
Rate of change [%] -0.9 -6.2 -22.4 42.4
3. 4紺 最適 設計結果
- 47 - 3. 4. 3 Case 3 結果
紺 Case 3 最適 結果 Case1,2 い 3.11 う 関節数 変
2 2関節 最適 ン 長 , 0.28, 0.22[m]
消費 ネ 59.28[× 10 ] 58.08[× 10 ]
約2[%] 減少 各関節数 対 最適 結果 表3.5 示
(a) 最適 前紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 (b) 最適 後 3. 11紺 Case3 軌
表 3. 5紺 Case2 最適 結果
設計 Initial n=2 n =3 n =4 n =5
0.25 0.28 0.25 0.14 0.1
0.25 0.22 0.11 0.07 0.11
- - 0.14 0.05 0.05
- - - 0.24 0.05
- - - - 0.19
Driving Energy × 10 59.28 58.08 73.42 79.04 83.15
Rate of change [%] -2.0 23.9 33.3 40.3
- 48 -
3. 4. 4 各Case 角 ,角 ,関節 ク
紺
(a) 角 変
(b) 角 変
(c) 関節 変
最適 前紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 最適 後
3. 12紺 Case1 角 角 関節 変
3. 4紺 最適 設計結果
- 49 -
(a) 角 変
(b) 角 変
(c) 関節 変
最適 前紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 最適 後
3. 13紺 Case2 角 角 関節 変
- 50 -
(a) 角 変
(b) 角 変
(c) 関節 変
最適 前紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 紺 最適 後
3. 14紺 Case3 角 角 関節 変
3. 4紺 最適 設計結果
- 51 - 3. 4. 5 各Case 効果量 Effect size
紺 出力値 入力値 間 関連性 あ う 予測 効果 称
指標 入 指標 比 系 影響力 わ 一
般的 入力変数 対 効果 Cohen’s d 式(3.12) う 義 [51]
| |
(3.12)
1 + 1
+ 2 (3.13)
一般 散
∑
1 (3.14)
入力変数 領域 出力変数 集 体 散
∑
1 (3.15)
入力変数 領域 出力変数 集 体 散 あ
入力変数 限領域 出力変数 均値 入力 変数 限領域 出力変数 均値 入力変数 限領域
値 数 入力変数 限領域 値 数 あ 紺 検 式(3.16) う
| |
+ (3.16)
紺 効果 d 式(3.17) 関係 あ
| | × ×
+ + 2
+ (3.17)
効果 数 大 値 大
意差あ 示 い [52]
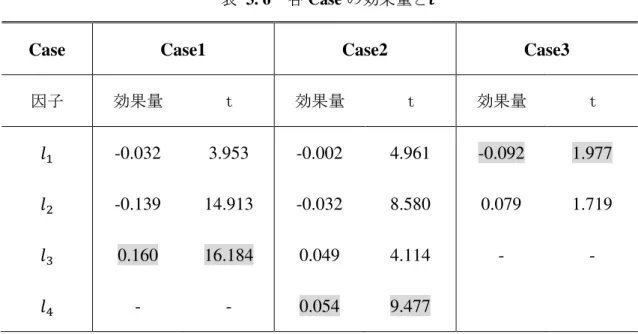
各結果 効果 d 検 値 表3.6 示 最 高い値 影 あ Case3 外 手先 ン 効果 高 影響 大 い
- 52 -
3.15 効 棒 表 い 棒 高 効果 呼 出
力値 入力値 間 関係 強 示 大 い効果 入力変 数 比例的 関係 示 0 い場 比例 関係 示
表 3. 6紺 各Case 効果
Case Case1 Case2 Case3
因子 効果 t 効果 t 効果 t
-0.032 3.953 -0.002 4.961 -0.092 1.977
-0.139 14.913 -0.032 8.580 0.079 1.719
0.160 16.184 0.049 4.114 - -
- - 0.054 9.477
3. 4紺 最適 設計結果
- 53 - (a) Case1
(b) Case2
(c) Case3
3. 15紺 各Case 効果 棒
- 54 -
3. 5 本章 ま め
紺 章 最適 関節数 ン 長 軌 影響
明 問題 簡略 行 面 動
計画 軌 沿 動 消費 ネ 最 最適 問題
式 始点 終点 一 特徴 持 型的
軌 え 軌 沿 動作 腕 2 関節 5
関節 GA 用い 最適解求 3 関節 自 生 冗長
自 関 3関節 関節角 設計変数 解決
紺 結果 各 軌 対 消費 ネ 減少 最適 関節
数や ン 長 求 特 Case1 Case2 う 比較的 単純 軌 い
関節数 増え 消費 ネ 減少率 高 効果的 あ
面 Case3 う 方向転換 数回あ 複雑 軌 い 関節 2 関節
最適 ン 長 変 や消費 ネ 減少 少 い 結果
紺 各場 角 角 関節 変 観察 共通点 見
根元 ン 角 変 大 い 関節 変 大 い 面 先端 ン 角 変 大 い 関節 変
少 い 理 根元 ン ネ 多 消費
根元 ン 動 い ネ 消費 少 い先端 ン 動 方向 最適 行わ 考え 紺
紺 最適 結果 中Case1 Case2 角 あ 区間 角 急
昇 あ 現象 い 関節角 0 特異姿勢 影
響 い 考え 両方 関節角 0 0 近 区間
あ 原因 角 急 昇 い 考え 理
式(2.5) 関節角や直交 標 関係 表 式(3.18) う
(3.18) 角 式(3.19) う
(3.19)
3. 5紺 章
- 55 -
角 ン行列 逆行列 計算 必要 行列式 値 0
逆行列 角 無限大 発散 う 系
関節角 0 行列式 値 0 角 発散
角 急 昇 理 特異姿勢 結果 考え
全 共通点 手先 ン 効果 [+] 根元
ン [-] 値 持 わ 意味 手先
ン 長 増加 消費 ネ 増加 根元 ン 長 増加
消費 減少 最適 消費 ネ 最
手先根元 ン 長 ン 短 傾向 あ 考え
実 最適 結果 Case1 Case 2 場 根元 ン 短
手先 ン 長 面Case 3 逆 結果 い
理 い 単純 手先 ン 短 根元 ン 長
余計 動 ネ 消費 場 関節数 増え 冗長自
理的 軌 消費 ネ 減少 い 推測
紺 章 最適 関節数 ン 長 軌 関
連性 把握 簡略 行い 運動特性や効果 基準 影 響 確 効性
3. 16紺 固 軌 搬送 適用例
- 56 -
結果 基 い 多関節剛体 初期設計 軌 設計 変数 入 設計 間 短縮や作業 効率面 効 関節数や ン 長
決 考え 章 得 結果 初期設計 段階
固 軌 作業 行う 対 ン 長 変更
消費 ネ 減少 期 例え 3.16 う A B
間 軌 固 い 搬送 対 関節数や
ン 長 最適 ネ 減少 考え 経済的 利
益 発生 思わ
角 急 昇や 一般的 結論 方法や目的
関数 設 更 研究 必要 考え 容 い 4 章 述 紺
4. 1紺 概紺 要
- 57 -
第 4 章
初期設計段階 おける二次元平面内 多関節ロボッ ア ム 関節数, ンク 長,軌道 同時最適化
4. 1 概 要
3章 最適 質 把握 型的
固 軌 え 問題 簡略 関節数や ン 長 最適 行い 軌 最適 関節数や ン 長 え 影響 検討 効果
析 結果 傾向 い 議論 搬送 例
挙 最適 結果 効性 初期設計 段階や既 対 確
章 初期設計 段階 関節数や ン 長 決 汎用性 手法 示 言う汎用性 あ 手法 初期設計段階 案 手法 最適 関節部や ン 長 決 後 流 設計 あ 詳細設計
段階 害物回避 作業空間 考慮 各種 制御 考慮
各種 最適 可能 手法 あ 軌 設計変
数 加え 行い 目的関数 消費 ネ 可操作 目
的 最適 問題 設 解法 示 数値計算例 得
結果 検討 行う 実 多関節 製作 実験 行
い 数値計算 結果 比較 検討 加え 最後 案 手法
搬送 適用 効性 示
前章 準備 固 軌 え 軌 沿
う 最適 関節数 ン 長 求 章 軌 知 設計
変数 含 最適 行う 前章 結果 関節角 0 特