産業用装置の位置合わせ機能に特化した符号化開口の最適化
作山努
†1舩冨卓哉
†2飯山将晃
†2美濃導彦
†2 逆畳み込みによる合焦画像の推定は,符号化開口を実装することで,精度よく行える.先行研究で提案されている 符号化開口は,自然画像のパワースペクトルモデルを評価式に導入し,その式によって最適化されていた.しかし, 位置あわせ用画像を撮影する産業用装置にその先行研究の符号化開口を適用しても,そのパワースペクトルは自然画 像と異なるため,十分な精度で合焦画像の推定ができない場合がある.そこで本研究では,位置合わせ用画像のパワ ースペクトルを符号化開口の評価式に導入することで,その復元に適した符号化開口の最適化を行った.この最適化 した符号化開口を適用したとき,最適化に用いた特定種類の画像の推定が先行研究よりも精度よく行うことができ た.Optimization of Coded Aperture mask for alignment in industrial
machinery
TSUTOMU SAKUYAMA
†1TAKUYA FUNATOMI
†2MASAAKI IIYAMA
†2MICHIHIKO MINOH
†2The camera equipped with a coded aperture can accurately recover the target scene from a defocused image by deconvolution technique. Previous study has reported an aperture pattern that was optimized based on the power spectrum of natural images. However, the aperture sometimes provides insufficient accuracy in recovering images for alignment in an industrial machinery. In this paper, we have introduced the power spectrum of the alignment images to optimize the aperture pattern. Our aperture could recover the target scene from the defocused alignment images with higher accuracy than that of the previous study.
1. はじめに
半導体ウェハやプリント基板,液晶パネルのパターンを 検査する装置には位置合わせの機能が搭載されている.こ の機能は,検査材料の位置を検出し,その材料の位置を検 査装置にフィードバックするものである.検査装置はフィ ードバックされた位置情報に応じてパターンの検査を行う. この機能の具体的な処理の一例を示す.まず,検査装置に, 検査材料が設置される.次に,位置合わせ用にあらかじめ 描画された所定のパターン(以下,アライメントマークと 呼称)を含む領域を撮影する.さらに,あらかじめ用意さ れたテンプレートと撮影画像とのパターンマッチング等を 行い,画像中のアライメントマークを検出する.最後に, 検出されたマークの位置情報を用いて,処理対象物の形状 変化や,位置決めの誤差を算出し,その誤差を吸収するよ うに装置が検査を行う.一般的に位置合わせ機能で用いら れるカメラにはオートフォーカスが搭載されているが,そ のオートフォーカスも失敗することがある.このとき,非 合焦画像が撮影され,アライメントマークの検出に失敗す る.その結果,検査装置は設計された描画パターンを適切 に検査できなくなり,不良品の見落としが発生する.この 非合焦画像が撮影される問題に対処する一手法として,逆 畳み込みによる画像復元が挙げられる[1]. 画像復元は,撮影した非合焦画像と,その画像のぼけ方 †1 大日本スクリーン製造株式会社 Dainippon Screen Mfg. Co., Ltd. †2 京都大学Kyoto University
を示す点広がり関数(PSF:Point Spread Function)の逆畳み 込みを行うことで,合焦画像を推定する技術である.この 逆畳み込みの演算は,非合焦画像,PSF をそれぞれフーリ エ変換して,周波数空間上で行う.もし位置合わせ機能で オートフォーカスに失敗しても,画像復元によって,十分 な精度で合焦画像が推定できれば,アライメントマークを 正しく検出できる.ただし,一般的なカメラの場合,PSF の周波数分布に多くのゼロ交差を持つことが原因で,安定 して合焦画像の推定が行えないことが知られている[2]. この問題を解決する手法として,符号化撮影が提案され ている[3].符号化撮影は,ハードウェアの工夫により,PSF を制御することで,画像処理のみでは不安定であった距離 推定問題や画像復元問題の解を,より安定して求められる ようにする方法である.光学の分野では,PSF はカメラの レンズ特性や開口の形状により決定されることが知られて いる.この特徴を活かして,符号化撮影の中でも,カメラ の開口を変更して,PSF の制御を行う研究がある[4][5][6][7]. このとき用いられる開口は符号化開口と呼ばれ,目的に応 じて様々な形状が提案されている.例えば,天文学の分野 ではMURA コード [4]と呼ばれる符号化開口が提案されて いる.一方,自然画像の分野では,Zhou ら[5]や Veeraraghavan ら[6],Levin ら[7]によってそれぞれ異なるアプローチで符 号化開口が提案されている.しかし,位置合わせ装置にこ れらの符号化開口を適用しても,十分な精度で合焦画像の 推定ができない場合がある. そこで,アライメントマーク画像のパワースペクトルを 導入した符号化開口の評価式を用いることで,それらの画
像の復元に適した符号化開口を設計した.本稿では,この 設計した符号化開口を適用して画像復元を行い,位置合わ せの精度を評価し,推定した合焦画像が位置合わせ装置に 必要十分な画質であることを示す.
2. 産業用装置の位置合わせ機能
半導体や液晶,プリント基板の各種検査装置の検査工程 において,検査材料の反り,あるいは,熱や研磨による前 工程(下地となるパターンを描画材料にあらかじめ描画し ておく工程)でのずれや歪みが発生し,設計と異なる位置 にパターンが描画されている場合がある.これを吸収しな れば十分な検査品質が得られないことがある.そこで,ア ライメントマークと呼ばれるパターンの撮影を行い,検査 材料の歪みを検出し,検査する位置を決定する.この一連 の処理による位置合わせ機能を用いない場合,設計上の描 画パターンと実際の描画パターンの比較ができず,検査性 能が低下する(図1). 図 1 検査装置の位置合わせ機能概要 アライメントマークは前工程で描画されたパターンが 用いられるが,その形は様々である.また,アライメント マークとして撮影されたパターンではなく,回路として設 計された部分の中で特徴的な部分をアライメントマークと して用いることもある.図2 に,アライメントマーク画像 の模式図を示す. 図 2 アライメントマークの模式図 通常,位置合わせ機能でアライメントマークを撮影する 装置にはオートフォーカスが搭載されているが,何らかの 原因によりオートフォーカスに失敗すると,非合焦画像が 得られ,設計されたパターンが検査できなくなる. 現状の要求は,この位置合わせ機能においてオートフォ ーカスを行う範囲で,非合焦画像が得られても0.5pixel 以 下の誤差でアライメントマーク検出ができるようにするこ とである.また,追加で許される処理時間は最小限とする. 本稿では,この条件を満たしながら,問題へ対処する方法 として画像復元を用いることを提案する.3. 関連研究
3.1 画像復元 一般的に非合焦画像が撮影される現象は(1)式で表現 される.n
k
i
i
0
(1) ここで,i は非合焦画像,i0は合焦画像,k はぼけ関数(PSF), n はノイズ成分である.(1)式をフーリエ変換によって周 波数領域で表現すると(2)式が得られる.N
K
I
I
0
(2) 非合焦画像及びPSF は撮影装置によってそれぞれ実測で きるため,I と K は既知である.さらに,ノイズ成分 N が 既知であれば,(3)式により合焦画像の周波数画像 Î0を推 定することができる.K
N
I
K
J
I
ˆ
0
(3) しかし(3)式からわかるように,もし K の一部にゼロ または小さい値を含むとき,Î0は発散もしくは不安定な解 になる.また(3)式の右項が示すように,除算によって画 像のノイズ成分が強調されてしまう[3].これを抑制する方 法として,様々なデコンボリューション手法が提案されて いる.その中でも,(4)式に示すウィナーフィルタを用い ることが一般的である[8]. 2 2 0ˆ
C
K
K
I
I
(4)|C|2は NSR(Noise-to-Signal Ratios)比を示し,|σ/Î 0|2 と定義される.また,σは撮影画像I に含まれるノイズの 標準偏差である.ただし,(4)式を用いても完全にリンギ ングを抑制できないことがあるため,十分な精度で焦点画 像を推定できない場合がある.よって,画像復元の際に生 じる,リンギングに対する様々な対策が提案されている. リンギングの一因は撮影画像に含まれるノイズである ため,そのノイズを画像復元処理の前にフィルタ処理によ って除去する手法が提案されている[9][10][11].一方,井 下ら[2]は,画像復元後に発生したリンギングを検出し,そ のリンギングだけを推定した合焦画像から除去する方法を 提案している.しかし,これらの手法を採用した場合,画 像復元の他にノイズへ対処するための計算処理を行う必要 がある.よって,処理時間を最小限にするという今回の要 求には不向きであると考えられる. 上述のように追加の計算を必要とせず,ハードウェアの 工夫により,画像復元で生じるリンギングに対処する方法 として,符号化開口を用いて画像復元を行う方法がある. 3.2 符号化開口を用いた画像復元 符号化開口は様々な用途に応じて提案されてきた.例え ば,天文学の分野で代表的なものは MURA コード[4]であ る.このMURA コードは天体望遠鏡で利用されることを想 定し,X 線やガンマ線を用いた撮影を前提としている.ま た,この符号化開口は,実装した際のPSF のパワースペク ト ル は 広 帯 域 に な る よ う に 設 計 さ れ て い る . 一 方 , Veeraraghavan ら[6]は可視光を撮影する通常のレンズカメ ラを想定し,PSF のパワースペクトルが広帯域になるよう に設計した符号化開口を提案した.具体的には,開口パタ ーンをランダムに変化させ,パワースペクトルの最小値が 最大となるように遺伝的アルゴリズムによる最適化を行っ ている. また,Zhou ら[5]は画像復元の結果を最適化するような 符号化開口を提案している.彼らは,真値I0と画像復元に よる推定結果Î0の差が最小になる開口を遺伝的アルゴリズ ムにより近似的に求めた.以下に Zhou らが作成した開口 の評価関数を示す.
ξ
A
K
K
R
(
)
2 2 2 (5) ここで,ξは周波数,Aξは1/f 法則[12][13][14]に従う自 然画像のパワースペクトル,σはノイズの標準偏差である. また,σが既知であり,真値I0と推定結果Î0の差分値を基 準としたとき,これまで提案された各先行研究の符号化開 口の中でこの(5)式で最適化した符号化開口が,最も合焦 画像に近い推定結果が行えることが示されている[5].この 評価関数では,1/f 法則に従う自然画像のパワースペクトル が用いられており,一般のカメラで撮影されるような自然 画像の復元が想定されている.一般に,N[pixel]×N[pixel] の画像のパワースペクトルは以下の式から求めることがで きる[15].
2 2,
1
,
y x y xI
k
k
N
k
k
(6)
y x y x y xstd
k
k
k
k
k
k
,
,
,
(7)
2
,
,
,
y x y x y xk
k
E
k
k
E
k
k
std
(8) ここでkx,kyはそれぞれ規格化周波数であり,I(kx,ky) は撮影画像のフーリエ変換結果を示す.また,Γはパワー スペクトルを示し,Γ´はΓを正規化したパワースペクト ルである.1/f 法則は自然画像のΓ´をモデル化した法則で ある.4. 提案手法
4.1 アライメントマークのパワースペクトル 一般的に,撮影対象の種類によって,得られるパワース ペクトルの傾向が異なると報告されている[15].よって, アライメントマーク画像が自然画像と異なるパワースペク トルの傾向を持っているとすると,Zhou ら[5]の符号化開 口は,アライメントマーク画像の画像復元にとって,最適 ではない可能性がある.そこで,(7)式を用いて,撮影さ れたアライメントマーク画像のパワースペクトルを画像ご とに求めた平均した結果と 1/f 法則から求めた自然画像の パワースペクトル平均を比較した(図3).パワースペクト ル平均を求めるためのアライメントマーク画像は,アライ メントマークとして用いることができる特徴的な領域を持 つテストパターン画像10 枚を用いた.実際は 2 次元のパワ ースペクトルが得られるが,図3 では y 座標の中心を切り 取ったx軸方向のパワースペクトルを示している. 図3 より,検査装置で用いられる各アライメントマーク 画像から求めたパワースペクトル平均は 1/f 法則から求め られる自然画像のものとは,異なることが見て取れる.ア ライメントマーク画像のパワースペクトルを画像毎に観察 すると,低帯域の周波数成分が自然画像よりも多く含まれ ていた.一方,アライメントマーク画像の中帯域の周波数 成分は各画像によって様々な特性が見られた.アライメン トマークは人工的に設計された比較的単純なパターンであ る.よって,図3 に示すように,アライメントマーク画像 は自然画像に比べて濃淡の変化が少ない.このことから, アライメントマーク画像には低帯域の周波数成分が自然画像に比べて多く含まれていたと考えられる.一方,中帯域 の周波数成分は,撮影対象に描かれているパターンに依存 するため,各画像で異なる.このため,アライメントマー ク画像の中帯域の周波数成分は平滑化され,自然画像に比 べてパワースペクトルの振幅が小さくなったと考えられる. 図 3 アライメントマーク画像の例と その画像のパワースペクトル平均値 4.2 符号化開口の最適化方法 4.1 で述べたように,自然画像とアライメントマーク画 像のパワースペクトル平均値をとったとき,画像に含まれ る周波数成分の傾向が異なることがわかった.よって, Zhou ら[5]が用いた開口の評価関数(5)式で自然画像のパ ワースペクトル平均が用いられている部分にアライメント マーク画像のパワースペクトル平均 Sξを代入した場合, Zhou らが提案した符号化開口と異なる形状に最適化され ると予測できる.そこで,Zhou らと同様に遺伝的アルゴリ ズムを用いて,Aξ=Sξとした(5)式の値を最小とする開 口k を求めた.以下にその具体的な手順を示す.このとき 求める開口k は 1 を開口部,0 を遮光部とする数列で表さ れる. ① ランダムな開口k を 4000 個発生させる.この開口は 13×13 のグリッドで構成され,ランダムに開口部, 遮光部が配置されている. ② ランダムに発生させた開口k のフーリエ変換結果, K を求める ③ Aξ=Sξとした(4)式に K を代入して評価値を求め, 4000 個の開口の内,評価値が低いものを 400 個選択 する ④ 400 個の開口からランダムに 2 つを選択し,新たな 開口パターンを以下の処理により生成する.この処 理を繰り返すことで,さらに3600 個の開口パターン を生成する. (ア) 選択された 2 つの開口の開口部と遮光部を 20%の確率で入れ替え,新たに 2 つの開口を作 成する (イ) 新たに作られた 2 つの開口の開口部と遮光部 を2%の確率で反転させる. ⑤ ②から④を80 回繰り返し,最も低い評価値が得られ た開口を選択する.このとき,開口率50%以上のも のを選択した. 図4 に通常の円形開口,Zhou らによって示された開口形 状,上記手法によって得られた開口形状を示す.この図に は一例としてσ=0.01 として最適化した結果を示す. 図 4 既存研究の符号化開口と提案する符号化開口
5. 実験
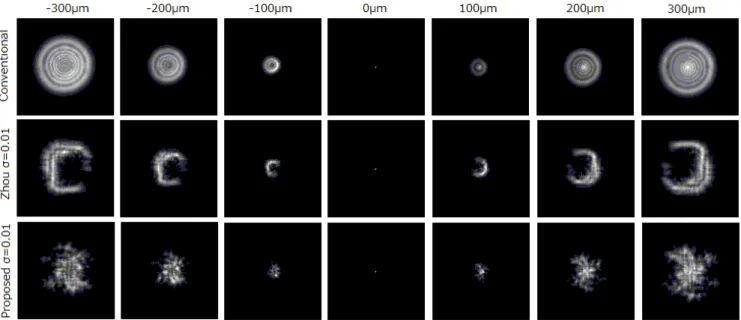
図4 に示す符号化開口を撮影装置にそれぞれ実装し,オ ートフォーカスで動作できる範囲で撮影された非合焦画像 の画像復元を行ったとき,位置合わせ機能に必要な精度 0.5pixel 以下のばらつきで位置の検出ができることを示す. 5.1 実験環境 この実験を行うための実験環境は実際の検査装置で用 いられているレンズを用いて構築した.また,画像撮影時, 後述するPSF 撮影時にセンサ面上で均一な光量を確保する ために,照明にはケーラー照明系[16]を採用した.撮影素 子 は 一 般 的 な CMOS セ ン サ で あ る ( acA2500-14gm/gc, BASLAR).図 5 に実験環境の概要図を示す.振動の影響を 考慮して,この実験環境は除振台の上で構築した.また, 外部からの照明の影響を排除するために,実験環境は暗室 内に設置した.本稿の技術の適用を想定している装置のオ ートフォーカスの範囲は,この実験環境の±300μm に相 図 5 実験環境図 6 各符号化開口を実装したときに撮影された PSF 当する.よって,物体面にはマイクロメータを設置し,μ m オーダーで光軸方向に移動できるようにして,±300μm の範囲で物体の撮影をできるようにした.負の方向は物体 面がレンズに近づく方向であり,正の方向は物体面がカメ ラから遠ざかる方向である.また,従来の絞りを設置する 位置には設計した符号化開口を設置できるように固定部を 設けた. 5.2 PSF の撮影方法 画像復元を行うとき,PSF が必要になる.この PSF はブ ラインドデコンボリューション[17][18]と呼ばれる手法に より推定する方法と,点光源を撮影し,それをPSF として 用いる方法が一般的に知られている.ブラインドデコンボ リューションは円形の絞りを前提とした手法が多く提案さ れているが,符号化開口を実装した場合に適用した例が少 ない.よって,今回はPSF を撮影する方法を選択した. PSF は理想的には大きさの無い点光源を撮影した画像で あるとされている.しかし,物理的に大きさの無い点光源 を作ることはできない.よって,5.1 で示した実験環境に とって十分小さい光源を作るために,物体面に微小な穴の 開いた板(以下,ピンホール)を用いた.実験環境に用い たレンズは,物体側の結像性能が約2μm であることから, PSF 実測に用いるピンホールは,直径 2μm の穴を採用し た.実験環境の物体面にこのピンホールを設置し,センサ と反対側から光をあてて,近似的な点光源を作成し,それ を撮影装置で撮影することで,PSF を±300μm の範囲,100 μm 間隔で撮影した(図 6). このとき,センサ側でオートゲインやトーンカーブによ る画像処理は全て行わないように設定した.また,合焦位 置からピンホールのズレ量が大きくなると,撮影された画 像の光量が低下する.これに対処するために,露光時間を ズレ量に応じて変化させて撮影している.このとき,正確 な点光源の輝度分布を測定するために,撮影されたPSF の 最大輝度値が230-254 の範囲になるように各条件で露光時 間を設定した.さらに,PSF を各条件で 100 枚連続して撮 影し,その撮影した画像の平均を取ることで,ノイズ成分 を吸収する処理を行った. 5.3 評価方法 まず,5.2 で示した方法で PSF の撮影を行う.次に,PSF と同様に100μm 間隔で±300μm の非合焦画像を撮影する. ただし,このとき露光時間は撮影した画像がサチレーショ ンを起こさないようにPSF 撮影時と異なる値を用いた.こ の非合焦画像及びPSF により画像復元を行い,その結果得 られた画像を用いてテンプレートマッチングを行う.画像 復元には(4)式のウィナーフィルタを用いた.また,今回 は画像復元を行うとき,非合焦画像の合焦位置からのずれ 量は既知であるとする. sampleB sampleD sampleC sampleA sampleB sampleD sampleC sampleA 図 7 評価対象画像とテンプレート
2 2 0
ˆ
C
K
K
I
I
Weiner Filter Defocus Image Focus Image Template Template matching)
(
x
0,y
0(
x
,y
)
Result Image
2 0 2 0x
y
y
x
d
2 2 0ˆ
C
K
K
I
I
Weiner Filter Defocus Image Focus Image Template Template matching)
(
x
0,y
0(
x
,y
)
Result Image
2 0 2 0x
y
y
x
d
※◆:従来の円形開口,■:Zhou らの符号化開口,▲:提案手法で最適化した符号化開口 図 8 位置合わせ精度の評価方法と各サンプルの評価結果 今回,テンプレートマッチングは市販されているソフト ウェアの関数を用いて行った(HALCON, find_shape_model 関数).この結果検出されたパターンの座標値(x,y)とパ ターンの座標値の真値(x0,y0)のユークリッド距離d を求 めた.本稿ではこの距離d を位置決め精度と定義する.位 置決め精度の評価に用いた撮影対象は,4.1 で計算に用い たアライメントマーク画像の内,大きさや線幅の異なる sampleA から sampleD の計 4 種類を用いた(図 7). また,アライメントマークの位置座標の真値(x0,y0)は, テンプレートを切り出した合焦画像に対して,同画像から 切り出したテンプレートでテンプレートマッチングを行い, 検出された座標と定義した.図7 の左上にテンプレートマ ッチングで用いたテンプレートを示す.また,同図の赤枠 で囲んである部分が位置決めの真値の位置を示す.6. 結果と考察
6.1 位置決め精度の評価 5.3 で示した位置決め精度の評価を行った結果を図 8 に 示す.今回評価に用いたsampleA から sampleD の全てのサ ンプルにおいて,提案手法で最適化した符号化開口を実装 して非合焦画像,PSF の撮影を行い,画像復元を行ったと き,従来の円形開口,Zhou らの符号化開口を実装したとき に比べて,位置決め精度が向上することが分かった.また, 提案手法により最適化した符号化開口を実装したとき,位 置決め精度は sampleD の-300μm の条件の場合は若干 0.5pixel を上回ったものの,要求された仕様をほぼ満たし ていた.よって,提案手法は今回想定するアプリケーショ ンにとって有効であるといえる. また,各サンプルの位置決め精度の大小に注目すると, sampleA から sampleC は物体面が負方向に移動すると,正 の方向に移動したときに比べて位置決め精度が悪くなりや すい傾向が見て取れる.一般に,物体面がカメラに近づく 方向のピントの合う範囲である前方被写界深度が,物体面 がカメラから遠ざかる方向のピントの合う範囲である後方 被写界深度よりも小さいことが知られている.これは物体 面がカメラに近づく方向に移動したほうが,撮影面の錯乱 円の面積,つまりぼけの面積が大きくなりやすいことに起 因する.よって,焦点位置からの距離が同じでも,負の方 向の条件では正の方向の条件に比べて,非合焦画像のぼけ方が強く,その条件で画像復元した結果を用いた位置決め 精度も悪化したと考えられる. 6.2 画像復元により推定した合焦画像のリンギング 図8 の sampleD の位置決め精度を見ると,提案手法で最 適化した符号化開口を除いて,sampleA から sampleC と異 なる傾向が見られた.図9 に従来の円形開口,Zhou らの符 号化開口を実装した場合の,sampleD のテンプレートマッ チングの結果を示す.図中の赤枠は真値を示し,それ以外 の領域は±300μm の各条件での検出位置を示す.この図 より,sampleD でテンプレートマッチングの結果検出され た位置を確認したところ,本来検出されるべきパターンと 全く異なる位置が検出されていたことがわかる. 図 9 sampleD のテンプレートマッチングの結果 今回用いたテンプレートマッチングのアルゴリズムは テンプレートと対象の画像からエッジ特徴を検出し,その 類似度を求め,最も類似度の高い領域を検出するものであ った[19].また,各開口を実装して撮影した非合焦画像か ら推定した合焦画像の推定結果を見ると,リンギングが現 れていた.図10 にリンギングが現れた一例として,sampleD で物体面を焦点距離から300μm 移動させ,撮影した非合 焦画像と推定した合焦画像を各開口の条件ごとに示す.従 来の円形開口,Zhou らが提案する符号化開口を実装したと き,このリンギングにより,正解のパターンの無い部分に テンプレートに類似したエッジが現れ,真値と異なる位置 が検出されたと考えられる.一方,提案手法によって最適 化した符号化開口を用いた場合,画像復元の結果発生した リンギングが他の開口を用いたときに比べて弱く,リンギ ングによってテンプレートに類似したパターンが現れなか ったため,他の開口を用いたときに比べて精度よく位置決 めができたと推察できる. Zhou らの提案する符号化開口を実装したとき,設計上の PSF のパワースペクトルは,リンギングの原因となるゼロ 点への落ち込みは含まれない.よって,設計通りにPSF の パワースペクトルが得られていれば,(3)式に示した撮影 画像に含まれるノイズ成分を強調することによって生じる リンギングは現れない.ここで,設計通りにPSF のパワー スペクトルが得られていることを確認するために,Zhou ら の符号化開口の設計上のパワースペクトルと,その符号化 開口を実装した状態で,画像として撮影したPSF のパワー スペクトルの比較を行った(図11). 図 10 推定した合焦画像の例(300μm, sampleD) 図 11 Zhou らの提案符号化開口の設計データ,撮影結果 (300μm)から求めた PSF のパワースペクトル この比較結果から,撮影したPSF では設計上とは異なる パワースペクトルが得られていることがわかった.さらに, 実際に撮影したPSF のパワースペクトルには設計時には見 られないゼロ点への落ち込みが見られる.この点が推定し た合焦画像にリンギングが発生した一因であると考えられ る.ここで,図8 の円形開口を実装して撮影した PSF を見 ると,理想的には点対称なPSF が得られることが想定され るにもかかわらず,非対称なPSF が得られている.理想的 なPSF が撮影できなかった原因として,装置部品の加工誤 差,またはそれらの調整誤差が影響した可能性がある.こ の装置部品の加工誤差,装置の調整誤差が原因となり,設 計と異なるPSF が得られたことで,想定されていなかった ゼロ点への落ち込みが発生したと推察する.
6.3 装置応用に向けた課題 今回,提案手法によって最適化された符号化開口を実装 して画像復元した結果を用いて位置合わせを行ったとき, 応用を想定するアプリケーションで要求されている位置決 め精度が得られた.ただしこれは今回評価に用いたサンプ ルに対しての評価であり,なおかつ画像復元の際に物体面 までの距離を既知として評価している. 評価に用いた画像はアライメントマークに用いたパタ ーンの大きさや線幅が異なるものであった.実際のアライ メントパターンも線幅や大きさが異なる様々なパターンが 使われる.例えば,sampleD のようにパターンの線幅や大 きさが小さいものほど位置決めが困難であると予測できる. そのため,装置応用を考えたとき,パターンの大きさや線 幅,アライメントマーク以外の領域のパターンの複雑さに 対してどの程度頑強に対応できるのかを定量的に評価して おく必要がある. また,実際に装置で画像復元を行う場合には,非合焦画 像から画像内の各対象までの距離推定を行う必要がある. 特にぼけの大きさから画像中の物体の奥行きを推定する手 法は Depth From Defocus(DFD)と呼ばれている[20][21]. DFD では,一般的に撮影画像と復元画像を任意の奥行きに 対応したPSF でぼかした推定合焦画像との差で奥行きの評 価関数が表される.この評価関数を最小化することで奥行 きを推定することができる.今後はこのDFD を用いた上で, 位置合わせ精度の評価を行う必要がある.
7. おわりに
本稿では産業装置で用いられる位置合わせ機能の位置決 め精度を向上させるために,位置合わせ機能で撮影される 画像のパワースペクトルを導入した評価式を用いて符号化 開口の最適化を行った.この符号化開口を実装した実験環 境を用いて非合焦画像を撮影し,画像復元によって推定し た合焦画像を用いて位置決め精度の評価を行った結果,先 行研究で提案されている符号化開口を実装したときと比較 して位置決め精度が向上し,かつ要求された仕様を満たす ことを確認した.ただし,装置応用に当たっては,撮影対 象に対するロバスト性の評価や,距離推定を含めた状態で の位置決め精度評価を行っていく必要がある.参考文献
1) 美濃導彦: 画像処理論-Web 情報理解のための基礎知識-, 株 式会社 昭晃堂,(2011). 2) 井下智加,向川康博,八木康史: ぶれ画像復元のためのリンギ ング検出器の提案, CVIM2010, No.7, pp.1-8, (2010). 3) 長原一: 符号化撮影, CVIM2010, No.14, pp.1-9, (2010). 4) S. R. Gottesman and E. E. Fenimore : New family of binary arrays for coded aperture imaging, Applied optics, Vol.28, No.30,pp.4344-4352, (1989).
5) C. Zhou and S. Nayar: What are Good Apertures for Defocus Deblurring?, Computational Photography (ICCP), 2009 IEEE International Conference on, pp.1-8, (2009).
6) A. Veeraraghavan, R. Raskar, A. Agrawal, A. Mohan and J. Tumblin: Dappled photography: mask enhanced cameras for heterodyned light fields and coded aperture refocusing, ACM Transactions on Graphics, Vol.26, No.3, (2007).
7) A. Levin, R. Fergus, F. Durand, and W. Freeman: Image and depth from a conventional camera with a coded aperture, ACM Transactions on Graphics, Vol.26, No.3, (2007).
8) H. Andrews and B. R. Hunt: Digital image restoration, Prentice Hall, (1977).
9) K. Dabov, A. Foi, V. Katkovnik, K. Egiazarian: Image denoising with block-matching and 3D filtering, Proceedings of SPIE, Vol.6064, pp.354-365, (2006).
10) J. Mairal, F. Bach, J. Poncen G. Sapiro, A. Zisserman: Non-local sparse models for image restoration, Computer Vision, 2009 IEEE 12th International Conference on, pp.2272-2279, (2009).
11) D. Zoran and Y. Weiss: From learning models of natural image patches to whole image restoration, Computer Vision (ICCV), 2011 IEEE International Conference on, pp.479-486, (2011).
12) Y. Weiss and W. T. Freeman: What makes a good model of natural images?, Computer Vision and Pattern Recognition, 2007. CVPR'07. IEEE Conference on, pp.1-8, (2007).
13) D. Mumford and B. Gidas: Stochastic models for generic images, {Quarterly of applied mathematics, Vol.59, No.1, pp.85-112, (2001). 14) A. Srivastava, A. B. Lee, E. P. Simoncelli, and S-C. Zhu: On Advances in Statistical Modeling of Natural Images, Journal of mathematical imaging and vision, Vol.18, No.1, pp.17-33, (2003). 15) T. Antonio, and A. Oliva: Statistics of natural image categories, Network: computation in neural systems, Vol.14, No.3, pp.391-412, (2003).
16) K. August: New method of illumination for phomicrographical purposes, Journal of the Royal Microscopical Society Vol.14, pp.261-262, (1894).
17) W. H. Richardson: Bayesian-based iterative method of image restoration, Journal of Optical Society of America, Vol.62, No.1, pp.55-59, (1972).
18) L. Lucy: An iterative technique for the rectification of observed distributions, Journal of Astronomy, Vol.79, pp.745-754, (1974). 19) C. Steger, M. Ulrich C. Weidemann: 画像処理アルゴリズムと 実践アプリケーション : HALCON によるマシンビジョンシステ ム構築のためのソリューション, リンクス出版事業部, (2008). 20) A, P. Pentland: A new sense for depth of field, Pattern Analysis and Machine Intelligence, IEEE Transactions on, Vol.9, No.4, pp.523-531, (1987).
21) M. Subbarao, G. Surya: Depth from defocus: a spatial domain approach, International Journal of Computer Vision, Vol.13, No.3, pp. 271-294, (1994).