歩行中のプラスチック短下肢装具に作用する荷重と装具変形の分析
—自動装具設計製作システムの開発を目指して—
北 野 将 利
*,北 山 一 郎
**,森 岡 大 輔
***Load and Deformation on a Plastic Ankle–Foot Orthosis during Walking
—Development of a Semi-automatic Orthotic Design and Production System—
Masato KITANO, Ichiro KITAYAMA and Daisuke MORIOKA
In this study, the load on a shoehorn brace-type plastic ankle–foot orthosis during walking was measured in 9 hemiplegic subjects and 6 non-hemiplegic subjects. A 6-axis force sensor was used to measure the load on the orthosis and a flexible goniometer was used to examine its deformation. Then, range and magnitude of moments and forces acting on the orthosis were calculated along each axis. We found a significant difference in the waveform for load in the longitudinal direction, which plays an important role in walking, between the hemiplegic and non-hemiplegic subjects, as well as significant inter-individual variation in the waveforms obtained from the hemiplegic subjects. These findings suggest that the thickness and shape of the brace should be taken into account when designing an orthosis to meet the functional needs of a hemiplegic patient. The waveform associated with deformation of the orthosis was confirmed to be similar to that of the waveform of the longitudinal load. We believe that the results of our study provide the basic data necessary for construction of a semiautomatic design and fabrication system for orthoses suitable for hemiplegic patients.
Keywords: Plastic ankle foot orthosis (PAFO), Six-axis force torque sensor, Goniometer, Hemiplegia, Gait analysis
1.緒 言
介護が必要となる主な疾病のうち脳血管疾患に分類さ れる脳卒中が第 2 位で約 18%を占めている1).これらの脳 卒中患者の多くに短下肢装具(AFO)が処方・適応される. 短下肢装具に関しては多くの研究事例がある.装具そのも のの剛性を調べた研究2) 3) や歩行中の装具の変形や剛性を 調べ,剛性を変化させたときの歩行を分析した研究 4),筋 電(EMG)などを評価指標とした研究 5) などである.し かし,装具に継手をつけることで足継手まわりのモーメン トを測定した研究6) はあるものの,いずれも歩行中に装具 に作用する荷重を測定した研究はみられない.これに対し, 著者らの研究グループは,装具装着歩行における装具に作 用する力学的負荷を計測できるシステムを開発し 7),片麻 痺者と健常者の歩行データを獲得してきた 8).これらの研 究では,従来測定されたことがないと考えられる装具に作 用する荷重ベクトルを測定し,装具の前後方向にかかる荷 重において片麻痺者と健常者との間で差異がみられること 8),歩幅とケーデンス(単位時間(1 分)あたりの歩数)で は歩幅の方の相関性が強いこと 8),荷重の発生点(ベクト ルの始点)が装具腓腹部周辺に集中していること 9)を提示 している.また一方,近年は 3D スキャナ,CAD,シミュ レーション,3D プリンタを活用することでプロダクトを製 作する流れがある.この中,装具製作においても,人の手 による採型,修正,製造といった一連の製作過程に代わる ものとして 3D プリンタ等を活用する製作システムの研究 10)が始まり,著者らも義肢装具士の技術を生かした“自動 装具設計製作システム”を提案し研究を進めている.同シ ステムにおいて,CAD による修正やシミュレーションを実 施するための装具の①力学的負荷データと②装具の評価方 法が求められるが,これらに対しては有効なデータと方法 が示されていない現状にある.著者らはこれらのデータと 方法を獲得すべく研究を実施した. 本研究では,新たに 9 名の片麻痺者と 6 名の健常者に対 し,力学的負荷状態を測定するセンサに加えて角度測定セ ンサを装着し,歩行中に装具に作用する荷重と変形状態を 同時に測定し,分析をおこなったので報告する.研究では, 測定システムの開発に注目していた従来の研究7) 8) 9) を拡 張し,前後方向,内外側方向,体重方向の各荷重および装 具の変形などを総合的に評価分析する.具体的には,以下 のこと目標とする. (1)荷重や変形の波形による被験者間の特徴から得られた 知見をまとめること (2)片麻痺者における荷重や変形のデータを提示し,今後 の装具の耐久試験などに役立てる基礎データとすること (3)現在研究が進行している“3D プリンタなどを使用し た装具の自動設計製作システム”の有限要素解析に使用す 原稿受付 2019 年 3 月 20 日 *近畿大学大学院生物理工学研究科(〒649-6433 和歌 山県紀の川市西三谷 930) **正会員 近畿大学生物理工学部(〒649-6433 和歌山 県紀の川市西三谷 930) *** 正会員 拓殖大学工学部(〒193-0985 東京都八王子 市館町 815-1)る荷重データを獲得すること (4)同設計システムの臨床評価に役立つデータや知見を獲 得すること
2.実験方法
2.1 装具歩行実験 (1) 測定システム 装具装着歩行の実験(装具歩行実験)では図 1 に示すセ ンサ内蔵型の測定システムを用いた.プラスチック短下肢 装具(装具)には,足底の踵に 1 点,つま先に 1 点および 腓腹部に 1 点の合計 3 個の 6 軸力覚センサを組み込んだ. さらに,装具の足関節まわりの角度変化を測定するために フレキシブルゴニオメータ(英国 Biometrics 社 SG150)を 取りつけた.サンプリング周波数は 1000 Hz とした. 6 軸力覚センサ(米国 ATI-Mini-45-E)は x,y,z の 3 軸 方向の荷重と,各軸まわりのモーメントが測定できる.足 底 2 点の 6 軸力覚センサでは床反力を知ることができるた め,これより歩行周期(立脚相,遊脚相)の識別をおこな った.腓腹部の 6 軸力覚センサでは,歩行中に装具に作用 する荷重およびモーメントを測定した.歩行中,装具底面 以外では装具腓腹部上部の後方面と前面のベルトのみに大 半の荷重がかかる.これらの荷重を測定するために装具を 腓腹部で分割して 6 軸力覚センサを前後から挟み込むよう に保持することで,歩行中に装具に作用する荷重およびモ ーメントを測定できるようにした8).Fig. 1 Measuring system and flexible goniometer installation
(2) 被験者について 被験者は 6 名の健常男性(年齢 30.5±16.1(平均±標準 偏差))と 9 名の左片麻痺者(男性 7 名,女性 2 名,年齢 60.0±11.8)である. 歩行回数は基本的に 10 回とし,左片麻痺者(片麻痺者) においては症状や申告に応じて歩行回数を調整した.健常 男性(健常者)については,今回の片麻痺者の歩行(表 1(a)) に対応して,歩幅は 30 cm,50 cm,70 cm の 3 パターンで 測定をおこない,ケーデンスは 80 steps/min とした.片麻 痺者は自由歩行とした.実験では,15 名の被験者それぞれ に対応して義肢装具士が製作した装具を用いた.義肢装具 士には,装具の厚みとトリミング量ができる限り一定とな るように製作を依頼した.
片麻痺者の Brunnstrom Recovery Stage(BRS)は表 1(b) に示すとおりである.BRS とは,脳卒中による運動麻痺の 代表的な評価法である.これは麻痺の程度がⅠからⅤの間 で示され,Ⅰが最も重度である.U/E は上肢,finger は指, L/E は下肢を示し,それぞれに対して評価がおこなわれる. L/E において,Ⅰは随意運動なし,Ⅱは下肢の随意運動が わずかに可能,Ⅲは座位や立位で股・膝・足関節の屈曲が 可能,Ⅳは座位で足を床上に滑らせながら膝屈曲 90°以上 可能そして座位で踵を床につけたまま足関節の背屈が可能, Ⅴは立位で股関節を伸展したまま膝関節の屈曲が可能そし て立位で患側足部を少し前方に出して膝関節を伸展したま ま足関節の背屈が可能であることを示す. なお,本実験は近畿大学生物理工学部生命倫理委員会 (承認番号 H27-1-002)より承認を受けている. (3) 実験用装具の座標系について 実験用装具に取りつけた各 6 軸力覚センサとフレキシブ ルゴニオメータの軸方向を図 2 に示す.今回,すべての片 麻痺者は左片麻痺であるため,健常者も含めて装具歩行実 験には左足用装具を用いた.
Fig. 2 Axial direction of each component of six-axis force torque sensor and angle direction of flexible goniometer
A B C D E F G H I Step length[cm] 86 57 53 67 53 23 32 40 70 Cadence[steps/min] 100 62 82 85 85 76 73 65 80 Conditions to be compared (step length[cm]/cadence[steps/min]) 70/80 50/80 50/80 70/80 50/80 30/80 30/80 30/80 70/80 A B C D E F G H I U/E Ⅴ Ⅲ Ⅲ Ⅳ Ⅲ Ⅲ Ⅲ Ⅲ Ⅳ finger Ⅳ Ⅲ Ⅲ Ⅴ Ⅲ Ⅱ Ⅱ Ⅲ Ⅲ L/E Ⅴ Ⅳ Ⅲ Ⅳ Ⅳ Ⅱ~Ⅲ Ⅳ Ⅳ Ⅳ
U/E:upper limb,L/E:lower limb
Table 1 Information on patients with hemiplegia (a) Walking condition and condition to be compared
2.2 静的負荷実験 本研究では,装具に作用する荷重を装具の角度変化から 予測するため,図 3 に示すように装具をアルミフレームで 製作した装置に固定して錘を吊るすことで,装具に対して 静的な負荷を与え,荷重と角度変化を測定した.具体的に は,静的負荷実験により得られた荷重と角度変化について 回帰分析をおこなうことで,装具に作用する荷重を角度変 化から予測するための係数を算出した.この実験では,装 具に作用する荷重すなわち実験用装具の座標系としては Fz 荷重を予測する係数の取得を目的としているため,装具 腓腹部の前後方向荷重および前後方向角度変化のみに注目 した.回帰分析の結果と算出した係数の例として片麻痺者 A の結果を示す.図 3 右側は,片麻痺者 A の装具で測定し た装具腓腹部に作用する前後方向荷重と前後方向角度変化 について回帰分析をおこなった結果で,(1)式はその回帰式 である.前後方向荷重を予測する場合,測定した角度変化 を(1)式に代入することで予測結果を得られる.ここでは, なるべく予測を容易にするため単回帰を採用している.
Fig. 3 Static loading experiment and an example measurement result (patient with hemiplegia A)
33.61
3.78
z pF
=
θ
+
(1)
3.測定・分析結果
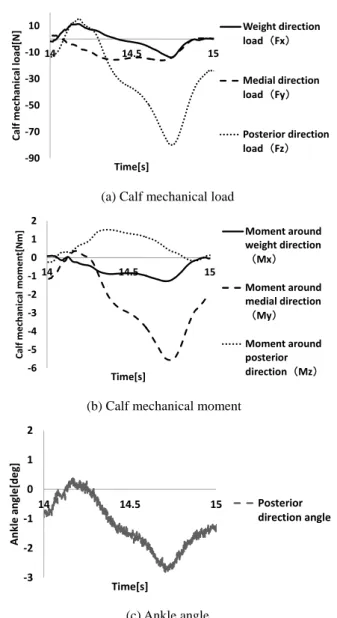
3.1 装具歩行実験 図 1 に示す測定システムを用いて装具歩行実験を実施し た.装具歩行実験による測定波形の 1 例として図 4 に片麻 痺者 C の測定結果を示す.図 4 の一段目は 6 軸力覚センサ の各軸方向荷重を,二段目は 6 軸力覚センサの各軸まわり のモーメントを,三段目はフレキシブルゴニオメータによ る装具の底背屈の角度変化(θp)を示している.θp はア ースに接続しているものの電源ノイズが十分低減できず観 察されている.しかし,歩行に比べて電源ノイズは高周波 であるため,大きな波形には影響されないと考え,観測さ れた波形をそのまま図に示した.装具歩行において,図 4 に示す装具腓腹部の前後方向荷重(Fz)の波形は,足関節 底屈運動をともなう立脚相前期では正の値を示し,足関節 背屈運動をともなう立脚相後期では負の値を示す.歩行中 の装具変形における角度変化においても同様である.(a) Calf mechanical load
(b) Calf mechanical moment
(c) Ankle angle
Fig. 4 Example measurement results about gait experiment (patient with hemiplegia C)
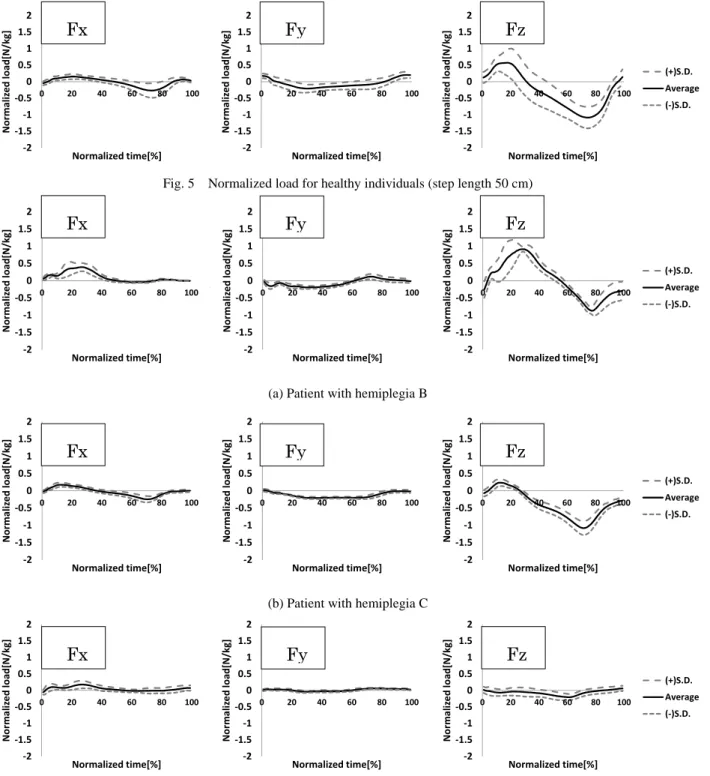
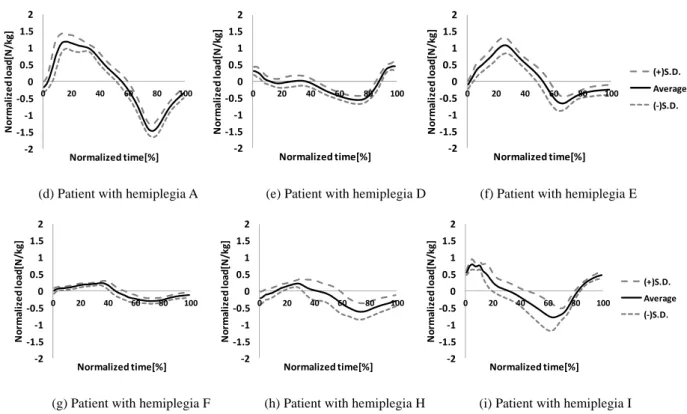
3.2 装具腓腹部に生じる荷重の最大値と最小値の分析 被験者それぞれの装具歩行実験の取得データが比較で きるように装具腓腹部に作用する体重方向荷重(Fx),内 外側方向荷重(Fy),前後方向荷重(Fz)それぞれの波形 を 1 立脚相が 100 %となるように計算し,さらに作用荷重 についても被験者の体重で除すことで標準化をおこなった. 図 5 では全ての健常者のデータを平均したものを 30 cm, 50 cm,70 cm それぞれの歩幅ごとに示し,図 6 は各片麻痺 者のデータを示す.図 5 と図 6 では,データの平均および 標準偏差の波形を示しており,左から順番に体重方向荷重 (Fx),内外側方向荷重(Fy),前後方向荷重(Fz)のそれ ぞれの波形を示している. 被験者の実験データの特徴を調べるため,健常者と片麻 痺者それぞれの体重で標準化した作用荷重波形の最大値お よび最小値を表 2 に示す.表 2 の(a)および(b)では, 今回の 健常者すべての立脚相における体重方向荷重(Fx),内外 側方向荷重(Fy),前後方向荷重(Fz),体重方向まわりモ -90 -70 -50 -30 -10 10 14 14.5 15 C a lf m e ch a n ic a l l o a d [N ] Time[s] Weight direction load(Fx) Medial direction load(Fy) Posterior direction load(Fz) -6 -5 -4 -3 -2 -1 0 1 2 14 14.5 15 C al f m ec ha ni cal m o m en t[ Nm ] Time[s] Moment around weight direction (Mx) Moment around medial direction (My) Moment around posterior direction(Mz) -3 -2 -1 0 1 2 14 14.5 15 A n kl e a n g le [d e g ] Time[s] Posterior direction angle -100 -80 -60 -40 -20 0 20 40 60 80 100 -4 -3 -2 -1 0 1 2 3 4 Loa d [N ] Angle[deg] Experimental value Predicted value
ーメント(Mx),内外側方向まわりモーメント(My),前 後方向まわりモーメント(Mz)の最大値と最小値の平均と 標準偏差それぞれを歩幅 30 cm,50 cm,70 cm ごとに示し たものである.表 2 の(c)および(d)では,片麻痺者の BRS と立脚相における体重方向荷重(Fx),内外側方向荷重(Fy), 前後方向荷重(Fz),体重方向まわりモーメント(Mx),内 外側方向まわりモーメント(My),前後方向まわりモーメ ント(Mz)の最大値と最小値の平均値と標準偏差を示し た.これらのデータの分析については考察で記載する. 片麻痺者全員の各軸方向荷重についてまとめると次の ようになる.ここで( )内のデータは,左から Fx,Fy, Fz を示しており,立脚相前期には最大値で(0.36±0.28, 0.079±0.051,0.68±0.46)(平均±標準偏差)N/kg であり, 立脚相後期には負の値としての最大値で(-0.18±0.15,- 0.21±0.11,-0.84±0.46)N/kg である.同じく,すべての 片麻痺者の中で,最大の作用荷重は,立脚相前期には最大 値で(0.87±0.24,0.12±0.082, 1.3±0.16)N/kg,立脚相 後期には負の値としての最大値で(-0.40±0.13,-0.36± 0.085,-1.5±0.15)N/kg である.
Fig. 5 Normalized load for healthy individuals (step length 50 cm)
(a) Patient with hemiplegia B
(b) Patient with hemiplegia C
(c) Patient with hemiplegia G
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d l o a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d l o a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d l o a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N or m a li ze d l oa d [N /kg ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N or m a li ze d l oa d [N /kg ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N or m a li ze d l oa d [N /kg ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N or m a li ze d l oa d [N /kg ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N or m a li ze d l oa d [N /kg ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N or m a li ze d l oa d [N /kg ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d l o a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d l o a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d l o a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D.
Fx
Fy
Fz
Fx
Fy
Fz
Fx
Fy
Fz
Fx
Fy
Fz
(d) Patient with hemiplegia A (e) Patient with hemiplegia D (f) Patient with hemiplegia E
(g) Patient with hemiplegia F (h) Patient with hemiplegia H (i) Patient with hemiplegia I Fig. 6 Normalized load for each patient with hemiplegia
表 2 によると,健常者の体重方向荷重(Fx)においては, 立脚相前期(表 2(a))では 0.1~0.2 N/kg となり,体重の 1~2 % の免荷機能を装具が果たしていると考えられる.立脚相後 期(表 2(b))では,体重方向とは逆方向に 0.2~0.4 N/kg の 値となっている.この荷重はベルトを前方に引張ることで 生じた荷重であると考えられ,立脚相前期(踵接地)の値 よりも大きな値を示している.内外側方向荷重(Fy)は, 踵接地時に内側荷重が発生し,その後,立脚相中期では外 側荷重へと荷重方向が変わり,立脚相後期(つま先の離床 前)では踵接地と同様に再び内側方向荷重となる.ただし, Fy は,体重方向荷重(Fx)や前後方向荷重(Fz)と比べて 値は小さい.前後方向荷重に関しては,立脚相前期(表 2(a)) では 0.2~0.8 N/kg 程度の荷重が後方に作用する.立脚相後 期(表 2(b))では 0.8~1.1 N/kg 程度の荷重が前方に作用し ており,Fx,Fy いずれの値よりも大きな値となっている. 一方,各片麻痺者で同様の標準化をおこなった波形と表 2(c),(d)の結果をみると,健常者と同様の傾向が片麻痺者 ではみられなかったので,さらに詳細な分析を実施した. 3.3 装具に作用する前後方向荷重の予測結果 本研究では,装具の変形にともなう角度の変化を調べる ためフレキシブルゴニオメータを使用した.同センサから の波形を調べる中で,装具に作用する荷重と波形の類似性 がみられたことから,角度変化から装具に作用する荷重が 予測できるのではないかと考えた.荷重の予測にあたり, 静的に装具に付加した荷重と変形にともなう荷重とを関連 づける係数(回帰係数)を事前に求め,それらのデータを 使用した. なお,足関節の角度と荷重の大きさの類似性に関する当 実験は,使用者の体調などの関係で角度データが取得でき なかった被験者があった.そこで,取得できた4名の片麻 痺者について分析を実施した. 図 7 は,静的負荷実験で得られた回帰係数と装具歩行実 験により得られた角度変化から予測した前後方向荷重(予 測荷重)と,装具に組み込んだ 6 軸力覚センサによって得 られた前後方向荷重を同時に示した片麻痺者 4 名の波形結 果である.
Table 2 Result of maximum value and minimum value of normalized load and moment on healthy individuals and each patient with hemiplegia
(a) Healthy individuals in normalized load
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d lo a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d lo a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d lo a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d lo a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d lo a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 20 40 60 80 100 N o rm a li ze d lo a d [N /k g ] Normalized time[%] (+)S.D. Average (-)S.D. Conditions to be compared (step length[cm]/cadence[steps/min]) Maximum value [N/kg] Minimum value [N/kg] Maximum value [N/kg] Minimum value [N/kg] Maximum value [N/kg] Minimum value [N/kg] 30/80 0.17±0.058 -0.23±0.14 0.19±0.071 -0.25±0.063 0.48±0.26 -1.1±0.26 50/80 0.20±0.078 -0.31±0.18 0.22±0.088 -0.28±0.095 0.73±0.28 -1.1±0.33 70/80 0.24±0.11 -0.39±0.21 0.24±0.085 -0.32±0.11 0.85±0.25 -1.2±0.37
Fx:weight direction load,Fy:medial direction load,Fz:posterior directon load
(b) Healthy individuals in normalized moment
(c) Each patient with hemiplegia in normalized load
(d) Each patient with hemiplegia in normalized moment
(a) Patient with hemiplegia A (b) Patient with hemiplegia D
(c) Patient with hemiplegia E (d) Patient with hemiplegia G Fig. 7 Posterior direction load and prediction load for each patient with hemiplegia
Conditions to be compared (step length[cm]/cadence[steps/min]) Maximum value [Nm/kg] Minimum value [Nm/kg] Maximum value [Nm/kg] Minimum value [Nm/kg] Maximum value [Nm/kg] Minimum value [Nm/kg] 30/80 0.011±0.0046 -0.012±0.0053 0.029±0.018 -0.068±0.023 0.018±0.0076 -0.017±0.0084 50/80 0.013±0.0053 -0.013±0.0072 0.045±0.020 -0.065±0.026 0.021±0.0097 -0.020±0.011 70/80 0.013±0.0054 -0.015±0.0075 0.054±0.019 -0.066±0.027 0.025±0.011 -0.022±0.011
Mx:moment around weight direction,My:moment around medial direction,Mz:moment around posteror direction
Brunnstrom Recovery Stage Subject (patients with hemiplegia)
L/E Maximum value[N/kg] Minimum value[N/kg] Maximum value[N/kg] Minimum value[N/kg] Maximum value[N/kg] Minimum value[N/kg]
A Ⅴ 0.87±0.24 -0.40±0.13 0.089±0.039 -0.36±0.085 1.3±0.16 -1.5±0.15 B Ⅳ 0.51±0.13 -0.057±0.026 0.12±0.082 -0.21±0.051 1.1±0.23 -0.92±0.12 C Ⅲ 0.18±0.061 -0.26±0.080 0.015±0.041 -0.26±0.080 0.27±0.082 -1.1±0.16 D Ⅳ 0.23±0.097 -0.10±0.050 0.095±0.033 -0.27±0.029 0.48±0.12 -0.57±0.13 E Ⅳ 0.31±0.16 -0.19±0.054 0.091±0.059 -0.11±0.056 1.1±0.22 -0.77±0.17 F Ⅱ~Ⅲ 0.39±0.021 0.065±0.030 0.11±0.019 -0.10±0.022 0.25±0.061 -0.33±0.084 G Ⅳ 0.20±0.10 -0.070±0.055 0.063±0.018 -0.054±0.028 0.063±0.085 -0.21±0.098 H Ⅳ 0.24±0.016 -0.22±0.060 0.073±0.030 -0.29±0.056 0.28±0.11 -0.65±0.22 I Ⅳ 0.10±0.074 -0.20±0.053 0.080±0.027 -0.19±0.057 0.90±0.077 -0.92±0.21 Average±S.D. Ⅳ 0.36±0.28 -0.18±0.15 0.079±0.051 -0.21±0.11 0.68±0.46 -0.84±0.42
Fx:weight direction load,Fy:medial direction load,Fz:posterior directon load
Fx Fy Fz Brunnstrom Recovery Stage Subject (patients with hemiplegia)
L/E Maximum value[Nm/kg] Minimum value[Nm/kg] Maximum value[Nm/kg] Minimum value[Nm/kg] Maximum value[Nm/kg] Minimum value[Nm/kg]
A Ⅴ 0.0070±0.0034 -0.019±0.0076 0.046±0.0040 -0.068±0.0087 0.028±0.013 -0.0090±0.0043 B Ⅳ 0.0091±0.0050 -0.013±0.0034 0.059±0.014 -0.066±0.011 0.017±0.0070 -0.59±0.48 C Ⅲ 0.0027±0.0016 -0.017±0.0028 0.0095±0.0050 -0.072±0.0089 0.021±0.00533 -0.0032±0.0012 D Ⅳ 0.0084±0.0020 -0.016±0.0027 0.031±0.010 -0.035±0.0080 0.022±0.0033 -0.0090±0.0028 E Ⅳ 0.0066±0.0038 -0.0096±0.0023 0.071±0.015 -0.048±0.013 0.013±0.0059 -0.012±0.0065 F Ⅱ~Ⅲ 0.011±0.0013 -0.0092±0.0014 0.0058±0.0058 -0.037±0.0070 0.016±0.0031 -0.014±0.0046 G Ⅳ 0.0010±0.0012 -0.0060±0.0011 0.0032±0.0091 -0.022±0.0084 0.0081±0.0022 -0.0069±0.0020 H Ⅳ 0.0046±0.0011 -0.010±0.0017 0.0088±0.0071 -0.037±0.013 0.027±0.0036 -0.012±0.0023 I Ⅳ 0.0028±0.0017 -0.0099±0.0028 0.059±0.0063 -0.052±0.016 0.014±0.0045 -0.0090±0.0029 Average±S.D. Ⅳ 0.0059±0.0040 -0.013±0.0055 0.034±0.026 -0.050±0.020 0.019±0.0086 -0.047±0.18
Mx:moment around weight direction,My:moment around medial direction,Mz:moment around posteror direction
Mx My Mz -200 -150 -100 -50 0 50 100 150 0 0.2 0.4 0.6 0.8 1 Lo a d [N ] Time[s] Prediction load Posterior direction load -40 -30 -20 -10 0 10 20 30 40 0 0.2 0.4 0.6 Lo a d [N ] Time[s] Prediction load Posterior direction load -60 -40 -20 0 20 40 60 80 100 0 0.2 0.4 0.6 0.8 1 Lo a d [N ] Time[s] Prediction load Posterior direction load -15 -10 -5 0 5 10 15 0 0.2 0.4 0.6 0.8 1 Lo a d [N ] Time[s] Prediction load Posterior direction load
4.考 察
4.1 荷重データの分析 装具に作用する荷重とモーメントについて,健常者(図 5)の波形の形状には大きな差が観測されなかったが,片麻 痺者(図 6)では,それぞれの波形に大きな差がみられること がわかった.これらは,装具による片麻痺者の歩行支援の 程度や片麻痺者と装具間の適合が影響しているものと考え られる.これらの図の特徴を調べるため,荷重の最大値, 最小値を抽出し,3.3 節で表 2 を提示した.さらに,これ らのデータに対してウェルチの t 検定で解析した結果を表 3 に示す.ここでの検定では,それぞれの片麻痺者に対応 した歩幅によるデータを使用した. はじめに,3.2節の結果についての考察を示す. (1)体重方向荷重(Fx)は,装具の免荷機能に関係する ものと考えられるが,健常者と片麻痺者間には特徴的な事 項は確認できなかった.装具の免荷機能については,健常 者と片麻痺者間に差があるかどうかも含め今後さらに詳細 な実験が必要と思われる. (2)内外側方向荷重(Fy)は,健常者においては,立脚 相前期と立脚相後期でほぼ同じ値の外側方向荷重の最大値 が得られ,立脚相中期において内側方向荷重の最大値が得 られる.一方,片麻痺者においては,内側方向荷重(正の Fy)は立脚相のどの部分でみられるかわからないが,内側 方向荷重は,立脚相中期で観測することができる.さらに, 外側方向荷重では,片麻痺者 B(健常者と有意差なし)を 除き全員,健常者よりも小さい値となっている.また片麻 痺者では,内側方向荷重は片麻痺者 A,H(ともに健常者 と有意差なし)以外は全員,健常者よりも小さい値となっ ている.これらは,健常者においては筋活動による内外側 方向荷重が得られているのに対し,片麻痺者においては足 関節まわりの麻痺により,足関節に従って体重が後方から 前方に移動する運動(ankle rocker)しかおこなっていない こと11)によるためと考えられる. (3)前後方向荷重(Fz)は,最大値で片麻痺者 I,最小値 で片麻痺者 C を除き,健常者よりも有意に大きな値か小さ な値となっている.前後方向荷重は,Fx や Fy よりも大き な値を示していることから,装具に作用する荷重で最も重 要な役割を担っていると考えられる.これらのデータが健 常者のデータよりも有意に大きいか小さい値となっている のは,様々な症状を呈する片麻痺者に対し,同じ装具を 使用することは必ずしも適した状態ではないことが考えら れる.同データについては,片麻痺者 A,B,E について大 きな値を示しているが,このことは,装具がこれらの被験 者の歩行の安定性に寄与している結果であると考える.Fz が小さい片麻痺者では,装具の強度が強すぎると考えられ る. 最も大きい荷重である前後方向荷重について,健常者で は,踵設置時に①装具の後方(座標では正の方向)に荷重 が作用し,つま先離床前には②装具の前方(ベルトによる 引張,負の方向)に①より大きな荷重が作用する.また, このことは健常者ではほぼ一定している.一方,片麻痺者 では,個人によっては,①あるいは②,または,両方が大 きいあるいは小さい場合など種々の状況が観察できる.こ のように片麻痺者それぞれにより,荷重は通常,健常者と 異なった波形となり,大きさも片麻痺者ごとに多種多様で あることがわかった.片麻痺者では,一定の手順で製作さ れた装具では,強度が大きすぎる場合や強度が低すぎる場 合に対応して設計の変更をおこなう必要があると考える. (4)表 2(c)の立脚相前期の踵接地時の前後方向荷重(Fz) の最大値では,片麻痺者 A,B,E のように大きな値を示し ている場合がある.著者らは,これらは装具が体に装着し た杖のように身体を支えてくれていると考えている.した がって,このような場合,装具は,装具使用者にとって身 体の補助として強度が強すぎると思われる.一方,立脚相 後期のつま先離床時(前後方向荷重の最小値)は,体重を 前方に移動することを制限するので,片麻痺者 A,B,C, I は装具の強度が強すぎるではないかと考えている.ここ で,片麻痺者 A,B は装具強度に関してスペックとしては トレードオフとなるので,後方荷重には強い荷重に対応で きる構造とし,前方荷重では柔軟な構造を有する装具とす ることが望まれる.このためには,例えば装具の断面 2 次 Table 3 Result of Welch’s t test between healthy individuals and each patient with hemiplegiaBrunnstrom Recovery Stage Subject (patients with hemiplegia) L/E Maximum value Minimum value Maximum value Minimum value Maximum value Minimum value Maximum value Minimum value Maximum value Minimum value Maximum value Minimum value A Ⅴ ** n.s. ** n.s. ** ** ** n.s. ** n.s. n.s. ** B Ⅳ ** ** n.s. * * * n.s. n.s. n.s. n.s. n.s. n.s. C Ⅲ n.s. n.s. ** ** ** n.s. ** ** ** n.s. n.s. ** D Ⅳ n.s. ** ** ** ** ** ** n.s. ** ** n.s. ** E Ⅳ * ** ** ** ** ** ** ** ** ** ** ** F Ⅱ~Ⅲ ** ** ** ** ** ** n.s. ** ** ** n.s. n.s. G Ⅳ n.s. ** ** ** ** ** ** ** ** ** ** ** H Ⅳ ** n.s. ** n.s. * * ** n.s. ** * * ** I Ⅳ ** ** ** ** n.s. * ** ** n.s. n.s. ** **
Fx:weight direction load,Fy:medial direction load,Fz:posterior directon load
Mx:moment around weight direction,My:moment around medial direction,Mz:moment around posteror direction n.s.:not significant,*:p<0.05,**:p<0.01
Mz
モーメントを考慮した構造とする,あるいは,装具外壁に 襞をつけることで,一方には曲がりやすい構造とするなど の改良方法が考えられる. 4.2 荷重と装具変形角度の関係 3.3節の結果についての考察を示す. (1)図 7 より,実測荷重と予測荷重の波形が類似している ことから,装具に作用する前後方向荷重は健常者や片麻痺 者に関係なく装具変形と作用荷重から得られる回帰式によ りある程度予測可能であると考えられる. (2)角度変化から装具に作用する荷重を予測することは, 装具靴底を固定し,腓腹部付近を後方に押す,あるいは ベルトで前方に引張ることと同じで,つまり片持ち梁に曲 げを加えるようなものであり,荷重の大きさと変形が対応 することはほぼ予測できる.しかし,臨床的には装具にど のような荷重が作用しているのかという重要な指標に対し, 高価なセンサと評価用に加工した装具を用いることなく, 装具の変形(臨床現場では,角度計測装置を多くの場合保 有している)から簡単に予測できれば,荷重という重要な 指標が得られ評価が非常におこないやすくなると考える. (3)緒言に記載したように,現状の装具の新しい設計製作 システムとして,図 8 のような“3D スキャナや 3D プリン タなどを使用した装具の自動設計製作システム”の流れが ある.同システムにおいてシミュレーションを実施するた めには,①装具の力学的負荷データと②装具の適合評価方 法が求められる.①では,今回取得した装具に作用する各 荷重データが役立つと考えられる.例えば,新たな装具材 料や形状を開発する際の繰返し耐久試験で装具に加える荷 重として活用できる.②の装具の評価方法については,歩 行中①の力学的負荷データが容易に獲得できれば,運動学 的および運動力学的分析から,トリミング(装具の一部を 削る行為)やコルゲーション(一部を盛り付けるような修 正)など使用者に適する装具設計が可能となると考える.
Fig. 8 Automatic Orthotic Design and Production System
この点については,装具の変形角度の変化から装具に作 用する荷重が高価な力覚センサを用いることなく予測でき るという結果が活用できる.いずれにしても,今回得られ たデータは,今後の装具の設計や装具の耐久試験装置開発 の基礎資料となると考えられる.
5.結 言
本研究では,片麻痺者 9 名と健常者 6 名の協力のもと装 具歩行実験を実施し,歩行中装具に作用する荷重や装具変 形などの分析をおこなった. 装具歩行実験より,今回得られた実験結果と知見は次の とおりである. (1)装具に作用する荷重は前後方向荷重(Fz)が最も大き く,体重方向荷重(Fx)や内外側方向荷重(Fy)よりも大 きいことがわかった.これらの事項は,上記の“装具の自 動設計製作システム”構築に役立つものと考えられる. (2)歩行において重要な役割を果たす前後方向荷重につい て,片麻痺者それぞれにより荷重は通常健常者とは異なっ た波形となり,その大きさも多種多様であることから,一 定の手順で製作された装具を使用した場合,そこまでの固 定力を必要としない,一方さらに大きい固定力を必要とす る,などの設計変更が必要になるのではないかと考える. (3)後方向荷重の波形と装具変形にともなう波形の類似性 については,装具の材料特性にともなう静的負荷実験で求 めた係数を利用することで,装具の動的な変形から装具に 作用する荷重を予測できることを示し,装具内にセンサを 内蔵することなく荷重が測定できる可能性を示した.この ことは,本研究で用いた実験用装具のように,大掛かりな システムを準備できない臨床現場において,角度センサに よる角度変化から装具に作用する荷重の予測ができると考 えられる. 今回の結果により,著者らが進めている“装具の自動設 計製作システム”の構築が前進したものと考える.6.謝 辞
実験にあたり,被験者として協力していただいた片麻痺 者および健常者の方々には,研究において大きく貢献して 頂いたことを心より深く感謝致します.なお,本研究の一 部は平成 28 年度科学研究費助成事業 (No. 16K01579)の支 援を受けました.ここに記して謝意を表します.参 考 文 献
1) "An overview of the basic survey of people's life in the 2017 academic year", The Ministry of Health, 2017-06-27. https://www.mhlw.go.jp/toukei/saikin/hw/k-tyosa/k-tyosa16/dl/16.p df, (accessed 2019-04-14).
2) Akazawa, Y., Nakagawa, A., Matubara, H., Nakamura, T., Nomura, T. and Tanaka, M.: A system development to measure plastic ankle-foot orthosis joint characteristics -relationship between AFO stiffness and ankle stiffness of twelve hemiplegic patients-,
Assistech report, Hyogo Assistive Technology Research and Design Institute, (2004), 168-173.
3) Nagaya, M., Mizuno, M. and Kazuki, T.: Flexibility of shoehorn type short leg orthosis - prediction of flexibility by multi variate analysis-, Bulletin of the Japanese Society of Prosthetics and
Orthotics, 7-3(1991), 307-311.
4) Yamamoto, S., Ebina, M., Kawai, H., Iwasaki, M., Miyazaki, S., Kubota, T. and Yamaguchi, T.: The effects of the flexibility and initial angle of ankle-foot orthoses on hemiplegic gait, Bulletin of
253-264.
5) Nicole.G.Harper., Elizabeth.Russell.Esposito., Jason.M.Wilken. and Richard.R.Neptune.: The influence of ankle-foot orthosis stiffness on walking performance in individuals with lower-limb impairments,
Clinical Biomechanics, 29(2014), 877-884.
6) Mine, Y., Kobayashi, Y., Takashima, T. and Fujimoto, H.: Research on the gait analysis of the spastic paralysis using the measurement orthosis, Transactions of the Japan Society of Mechanical Engineers.
C, 72-722(2006), 3280-3285.
7) Saito, Y., Kitayama, I., Koyama, H., Morimoto,T. and Sonobe, H.: Measurement of stance phase function of plastic ankle foot orthosis while walking, The Japanese Society for Experimental Mechanics, 14-1(2014), 9-15.
8) Kitano, M., Kitayama, I., Morioka, D., Nakano, K., Yamanaka, T., Ohmasa, M., Koyama, H., Sonobe, H. and Miyazaki, N.: Analysis of plastic ankle-foot orthoses : a comparison of healthy individuals and
patients, Japanese Journal of Clinical Biomechanics, 37(2016), 365-372.
9) Kitano, M., Kitayama, I., Morioka, D., Yamanaka, T., Ikehara, Y., Koyama, H., Morimoto, T., Sonobe, H. and Miyazaki, N.: Movement and relation between forceVector and plantar/dorsiflexion angle during walkingwith plastic ankle foot orthoses, The Japanese Society for Experimental Mechanics, 16-2(2016), 147-153.
10) Morioka, D., Kitayama, I., Nakano, K., Kitano, M., Yamanaka, T., Koyama, H., Morimoto, T., Sonobe, H. and Miyazaki, N.: Finite element analysis of trimmed plastic ankle-foot orthoses, Advanced
Experimental Mechanics, 1(2016), 269-276.
11) Kobayashi, K., Kinase, A., Shimanuki, Y. and Hukatani, T.: Effect of ankle foot orthosis on leg movements during stance phase of walking, Medical and Health Science Research : Bulletin of Tsukuba