3. 2000 年度 共同・プロジェクト研究報告
レーダ散乱量を用いた散乱体の形状認識について
研究代表者 研究員 白井 宏(中央大学理工学部電気電子情報通信工学科)
共同研究者 研究員 趙 晋輝(中央大学理工学部電気電子情報通信工学科)
共同研究者 研究員 牧野 光則(中央大学理工学部情報工学科)
1 はじめに
電磁波が物体に入射して散乱を起こすとき,その物体が 波長に比べて大きいほど,物体の局所的形状がその散乱パ ターンに大きく影響を及ぼす。したがって高周波電磁波を 用いた物体の散乱現象を調べるには,その散乱体の局所的 な形状をよく知る必要がある。逆に局所的な形状からの散 乱現象をある程度把握しておけば,その散乱データを基に 散乱体の形状の推定が可能となる。
筆者らは既に,自動車形状をモデルにした電磁波散乱解 析を行い,波長に比べ十分大きな散乱体の場合,幾何光学的 回折理論(Geometrical Theory of Diffraction: GTD[1]) に代表される高周波散乱解析手法は解析に十分有効である こと,また後方散乱については,主反射方向をもつ平板の 両端のエッジで励振されるエッジ回折波が重要な役割を果 たすことを示してきた[2]-[4]。そこで本報告では,凸型柱 状散乱体に平面電磁波が入射した場合の散乱現象をGTD を用いて解析し,主反射方向となる反射境界における回折 波の表現を基にして,後方散乱波の性質を調べた。そして 後方散乱に対して計算したモノスタティックレーダ散乱断 面積(Radar Cross Section: RCS)の角度依存性からその 散乱体を構成している各平板の大きさを簡単に推定する方 法を示す。
本報告で提案したアルゴリズムの有効性を調べるために,
アルミ平板を用いて作られた導体散乱体モデルを使って,
RCS値を実測し,それらのデータに対し本アルゴリズム の適用を試みた。その結果,本方法は凸型柱状の散乱体に 対し,構成要素である各平板の寸法を精度よく推定できる ことが示された。さらに各平板を接続して元の散乱体の形 状を再構成し,可視化する方法についても調べている。
2 問題の定式化
2.1 凸型柱状散乱体の RCS 値
完全導体の方形平板を組み合わせて作った凸型断面を持 つ柱状散乱体を考え,そのRCS値を求める。図1に示す ように入射角θ0で入射したH偏波(ui=Hz)の平面波:
ui= exp(−ikxcosθ0−ikysinθ0) (1)
による散乱を考える。散乱体が凸型断面を持つ柱状導体 であるとすれば,散乱体から十分離れた観測点Pにおけ る遠方放射界は,散乱体のエッジによって励振されるエッ ジ回折波のたし合わせで表すことができる。今,モノスタ ティックRCS値から形状推定を行うことを念頭におくと,
凸型断面物体による高周波散乱については,主反射方向に 近い位置関係をもつ導体板の両エッジからのエッジ回折波 が主な寄与となることがわかっている[2],[3]。そこで図1 のエッジA , Bからのエッジ回折波の寄与をGTDを用い て表すと[1]
ut=uA+uB, (2)
uA=C(kρA)D+1(θA, θ0, φA)ei(ka/2) cosθ0
, (3)
uB=C(kρB)D+1(θB, π−θ0, φB)e−i(ka/2) cosθ0
(4)
と表される。ここでC(x)は,二次元自由空間のGreen関 数の遠方界を,またDτ(φ, φ0, φw)は開き角φwの導体エッ ジによる回折係数を表し
C(x) = 1
√8πxei(x+π/4), (5) Dτ(φ, φ0, φω) = 2π
φω
sinπ2 φω
·
1 cosπφ2
ω−cos(φ−φφ0)π
ω
+ τ
cosφπ2
ω−cos(φ+φφ0)π
ω
(6)
と表される。ただし(ρA, θA),(ρB, θB)は,それぞれエッ
ジA , Bを中心とした円筒座標である。
主反射方向への散乱遠方界はρA,B=ρ±(a/2) cosθ, θ= θA=θB=π−θ0とおくことにより
ut∼C(kρ)
−2ikasinθ0
+
2π φAsinφπ2
A
cosφπ2
A
1−cos2θφ0π
A
−sinφπ2
Asin2θφ0π
A
+
2π φBsinφπ2
B
cosφπ2
B
1−cos2θφ0π
B
−sinφπ2
Bsin2θφ0π
B
=−2ikasinθ0C(kρ)
1 +O1
ka (7)
―12―
図1 導体平板による散乱
となる。この式から,明らかにkaが大きければエッジA, Bをもつそれぞれのウェッジの開き角φA, φB の影響は小 さくなることがわかる。したがって,z方向にLの長さを もつ有限長角柱のうち,エッジA , Bを含む面からのモノ スタティックRCS値は,θ0=π/2とおいて
σ2D∼ lim
ρ→∞2πρ uuti
2=2πλa2 (8) σ3D= 2L2
λ σ2D= 4π aL
λ
2
(9)
と近似することができる。ここで二次元RCS値σ2Dから 対応する垂直入射の三次元RCS値σ3Dへの変換には変換 公式を用いた[5]。
いま平板の寸法a,Lのそれぞれを求めるには,上式で 求めたRCSのピーク値σ3D のみでは不可能である。そ こでピーク値を与える直近のゼロ点に注目した。両エッジ
A , Bからの回折係数が反射に対する影との境界前後で異
なる符合をもつことを考えると,反射境界前後のゼロ点は,
エッジA , Bからの回折波の位相差が2πずれたときに生 じる。つまり観測点PからエッジA , B迄の距離ρA, ρB
の差が往復で±λのときである。散乱界をθ0+ ∆θと考え ると,∆θと波長λの間に
λ=|2acos(θ0+ ∆θ)| (10)
なる関係が存在することがわかる。今θ0 = π/2である から
a= λ
2 sin ∆θ = π
ksin ∆θ (11)
となり,このaの値と式(9)のRCSピーク値σ3Dから
L=
λ2σ3D
4πa2 =
√σ3Dπ
ka (12)
が求められる。
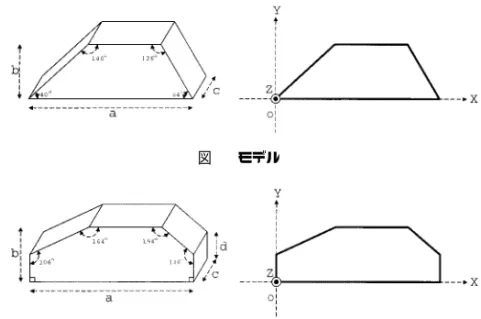
図2 モデル1
図3 モデル2
2.2 形状の認識アルゴリズム
前節のようにして,散乱体の構成要素となっている導体 平板の大きさを求める。最初に問題となるのは,測定した RCSデータの中から,平板の主反射方向を示すピーク値 を検索することである。散乱体が,ほぼ180°に近い開き 角のウェッジで近似されると,両面の主反射方向が近くな るので誤認識につながる。ここでは,各RCS値のうち極 大値を結んでできた線分から,再び代表的な極大値を抽出 し,その点の前後のゼロ点を用いた。さらに測定点の少な い場合には,測定点の値が極大,あるいは極小とならない こともある。したがって,データ補間が必要となる[6]。
3 結果及び検討考察 3.1 凸型散乱体の認識
今回の認識アルゴリズムの有効性を示すために,散乱体 モデルを作り,電波暗室内の測定値をもとに,認識を行っ た。図2, 3 に使用した凸型柱状散乱体を示す。図2は4 角柱,図3は6角柱のモデルであり,厚さ5mmのアルミ 平板を接続して作られている。各モデルの主要寸法はそれ ぞれa=143mm,b=40mm,c=57mm,d=24mmである。
これらのモデルに対するRCS測定値を図4,図5に示 す。ここで測定に用いられた周波数は24GHzである。
測定結果の図4,5から明らかなように,散乱体を構成し ている導体平板の幅a(このモデルでは,Lに相当する寸法 cは一定値(57mm)としている。)とそれらの数に対応し て鋭いピークがRCS値に存在することがわかる。測定デー タは0.5°ごとのサンプルであり,再構成のためにはRCS ピーク値の算出に近くのサンプリング値からスプライン補 間関数を用いて,4次のB-スプライン関数[7]で補間し決 定している。近くのエッジ間における多重散乱や測定実験
―13―
図4 モデル1の散乱特性(測定値)
図5 モデル2の散乱特性(測定値)
の誤差の影響もあり,検出したピーク値の前後のゼロ点ま での角度∆θは対称にはならない。いろいろな検討の結果,
∆θの値としてはピーク値前後のゼロ点までの角度∆θ+,
∆θ−を抽出し,それらの平均値∆θ(= (∆θ++ ∆θ−)/2) で決定したほうがよいことがわかっており,その方法をこ こで用いている。
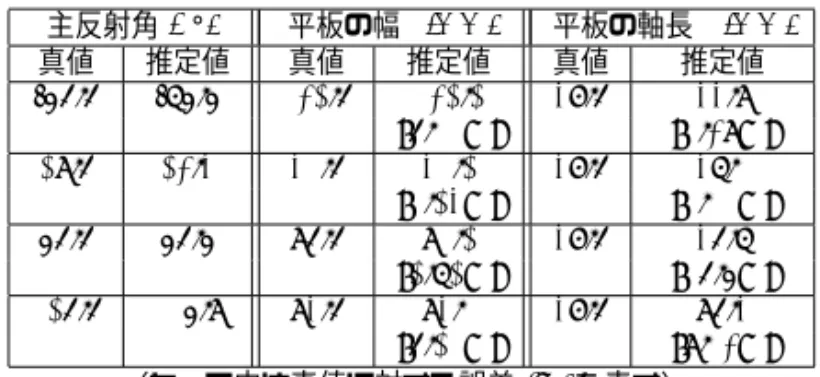
このようにして求めた主反射の角度,各平板の大きさを 表1,表2に示す。最大の推定誤差は4.9mmで14.4%と なり,両モデルとも非常に真値に近い推定が行えることが わかる。特に軸長Lの誤差については,幅aのそれに比 べやや大きくなっているが,これは∆θからaを推定し,
その値とRCSピーク値σ3Dを用いてLを推定するため aの誤差まで含まれるためと考えられる。
3.2 散乱体の再構成と可視化
こうして得られた各平板の大きさ,方向だけでは散乱体 の全体形状は推定されていないので,どんな形状をしてい るかわかりにくい。そこでこれらのデータを基にして,散 乱体の形状の再構成を試みる。
形状の再構成にもいろいろな方法が考えられるが,ここ
主反射角[°] 平板の幅a[mm] 平板の軸長L[mm]
真値 推定値 真値 推定値 真値 推定値 -90.0 -89.9 143.0 143.3 57.0 55.6
(0.21%) (2.46%)
36.0 34.5 52.0 51.3 57.0 58.2
(1.35%) (2.11%)
90.0 90.9 60.0 62.3 57.0 50.8
(3.83%) (10.9%)
130.0 129.6 65.0 65.2 57.0 60.5
(0.31%) (6.14%)
(カッコ内は真値に対する誤差[%]を表す)
表1 認識後のモデル1の面の大きさの比較 主反射角[°] 平板の幅a[mm] 平板の軸長L[mm]
真値 推定値 真値 推定値 真値 推定値 -90.0 -89.8 143.0 143.3 57.0 56.4
(0.21%) (1.05%)
0.0 1.5 28.0 29.5 57.0 53.6
(5.36%) (5.96%)
64.0 63.6 34.0 38.9 57.0 56.8
(14.4%) (3.33%)
90.0 90.5 58.5 62.4 57.0 56.8
(6.67%) (0.35%)
106.0 105.8 54.0 53.2 57.0 57.3
(1.48%) (0.53%)
180.0 179.6 28.0 28.9 57.0 58.7
(3.21%) (2.98%)
(カッコ内は真値に対する誤差[%]を表す)
表2 認識後のモデル2の面の大きさの比較
では全ての平板の主反射の角度を用いて面と面を接続する 方法を用いた。図6,図7にその結果を示す。各図の右側 が断面形状,左側が三次元的な構成図である。接続したこ とにより最初の面と最後の面の接続部分(図中の左下)に 誤差が集積することになる。これらの可視化した再構成図 は,Java言語を用いたプログラムにより,パーソナルコ ンピュータの画面上に,標準的なブラウザであるInternet
Explorer等を用いて表示できる。また,マウスで様々な視
点から観測できるように操作することができる[8]。
4 結論
本報告では,モノスタティックRCS値を用いて凸型柱 状散乱体の形状認識のためのアルゴリズムを考案した. 多 角柱形状をもつ導体散乱体の後方散乱のようすを高周波 漸近解法であるGTDを用いて解析し,ここで用いたアル ゴリズムは実際に電波暗室内のモデル物体によるモノスタ ティックRCS 測定結果に対して適用し,その有効性を調 べた。その結果,本アルゴリズムは凸型柱状物体の各平板 の大きさを推定するのに有効であることが示された。さら にこうして得られた各平板の大きさを基に散乱体の形状を 再構成し,可視化する方法においても検討した。今後は,
凹部をもつことにより主反射方向が逆転したり,二枚以上 の板が平行に存在,あるいはほとんど平行に存在する場合
―14―
図6 RCS実験値からの再構成図(モデル1)
図7 RCS実験値からの再構成図(モデル2)
について,それらを分離する方法について検討を進める方 針である。
謝辞
本研究は,中央大学 理工学研究所2000年度,2001年 度共同研究の援助を受けて行われた。ここに記し,謝意を 表する。
参 考 文 献
[1] J. B. Keller: “Geometrical theory of diffraction,”
J. Opt. Soc. Am.,52(2), pp.116-130, 1962.
[2] 林,白井,関口: “多角柱による平面電磁波の散乱解 析,”電学会電磁界理論研資, EMT-97(36), pp.61-66, 1997.
[3] 白井,林: “自動車モデルに対する電磁波の散乱,”電 学会電磁界理論研資, EMT-99(78), pp.47-52, 1999.
[4] H. Shirai, K. Okawa and T. Hayashi: “High fre- quency EM scattering by automobile models,”
Proc. of 2001 Progress in Electromagnetics Re- search Symposium (PIERS 2001), p.124, 2001.
[5] R. A. Ross: “Radar cross section of rectangular flat plates as a function of aspect angle,” IEEE Trans. Antennas and Propag., A P-14(3), pp.329- 335, 1966.
[6] 有竹: “RCSを用いた完全導体散乱体の形状推定,”卒 業論文,中央大学理工学部, 2000.
[7] 桜井,菅野,吉村,高山: “Cによるスプライン関数,”
東京電機大学出版, 1993.
[8] 小野,白井,有竹,牧野,趙: “RCS値を用いた凸型 柱状散乱体の形状認識について,”電気学会電磁界理 論研資, EMT-01(96), 2001.
―15―