Title
Transient Stability Regions of Power Systems
Author(s)
Miyagi, Hayao; Taniguchi, Tsuneo
Citation
琉球大学理工学部紀要. 工学篇 = Bulletin of Science &
Engineering Division, University of the Ryukyus.
Engineering(15): 105-114
Issue Date
1978-03-01
URL
http://hdl.handle.net/20.500.12000/27655
Transient Stability Regions of Power Systems
Hayao MIY AGI* and Tsuneo TANIGUCHI**
Summary
The direct method of Lyapunov is used to estimate the stability region
of power systems. A method for the construction of the Lyapunov function,
which has been developed recently, is applied to a
single-machine system with
and
without
a velocity governor. Such method is based
on
a construction
technique of the Lagrange's state function resulting from
second-order
ordinary
differential equations. The stability region given by the obtained Lyapunov
function is compared
with
those
given
by other Lyapunov functions and is
found to be useful in the power
system
transient stability problem
.
Furthermore,
its construction procedure seems to be concise.
List of principal symbols
M machine(generator) inertia constant in p.u. power second per electrical radian.
D = machine damping coeff;cient in p.u. power-second per electrical radian. Eq' = p.u. voltage proportional to field flux linkage.
EB = p.u. infinite-bus voltage.
xd p.u. direct axis synchronous reactance. Xq p.u. quadrature axis synchronous reactance. xd' = p.u. direct axis transient reactance.
X12 = p.u. total reactance between the generator terminal and the infinite-bus. Kg= loop gain of the governing system.
wo = 2 "fo Cfo=60Hz)
Tg = equivalent time constant of the governor, second.
1 . Introduction
1)
In the previous paper, the authors presented a new method of constructing Lyapunov functions for power systems represented by n second-order ordinary differential equations. The Lyapunov function constructed by the method :s equivalent to the generalized energy function of the system.
In this paper, the stability region given by the obtained Lyapunov function is compared with those g:ven by other Lyapunov functions. To begin with, a simple model of power system without,:velocity governor is considered. Then, the various Lyapunov functions are derived for the system. Although the authors' Lyapunov function (energy function) is found to be a special case of those obtained by Popov's method, it is shown that the Lyapunov function proposed offers better results for judging stability of the system.
--- --- - - - -- - - -- - - - -- - -- - - -- - - -- - - --
-Accept : 1977.10. 20
*
Dept. of Elec. Eng., Univ. of the Ryukyus**
Dept. of Elec. Eng., Univ. of Osaka Prefecture106 Transient Stability Regions of Power Systems
Next, two Lyapunov functions are given for the power system with a velocity governor. One is a Lyapunov function by the method developed in the previous paper. The other is a
2)
Lyapunov function given by Pai et al., which is constructed by Popov's method. The stability regions of the two Lyapunov functions are illustrated, showing no superiority among them. In case of using critical reclosing time in the estimation of the power system transient stability, however, authors' function often offers better results. This fact is designated in another example of power system with a velocity governor, while the synchronous generator is considered to be a salient pole machine.
2. Single-machine system
The system under consideration consists of a synchronous generator connected to an infinite bus through transmission lines. The normalized equation of a synchronous generator-infinite bus
2) system in the prefault state can be written as
o+Do=Pi-sino ( 1)
where, iJ is the rotor angle with respect to a synchronously rotating reference, Pi and D are
mechanical power input and constant damping coefficient, respectively. The equilibrium state
iJ0=sin-1Pi, ilo= 0 can be transferred to the origin by defining a new variable x=il-ilo
so that eqn. (1) becomes
x+Dx+f(x)=O where
f(x)=sin (x+ilo) -Pi
(2)
( 3)
(4) Application of the Popov's method to the system given by eqn. (3) yields a following Lyapunov function in the region xf (x) 2 0 near the origin.
· 1 · D D2 (n-1)
Jx
V(x,x) =--zCx+n
x)2+ 2 n2 x2+ /Cx)dx ( 5) with . . Dl
l
V(x,x)==-n (n-1) x2+xf(x) ( 6)In eqn. (5), different choices of n will lead to different Lyapunov functions. Various cases for
the value. n are listed in Table 1.
Table 1. Various Lyapunov functions for various n
n Lyapunov function V
oo energy function3)
1 , 2 Rao's function4)
D/p (D:S.,p:S-,0) Mansour's function 5)
1 +Da Pai's function2)
To determine the stability region it is necessary to calculate, first, the unstable equilibrium
state closest to the stable equilibrium state. Then, the critical value Vc of the Lyapunov function
V, which describes the stability boundary, is obtained by substituting such unstable equilibrium
- - 1 1=00 ---II=-! - - - n=l 0.5 0 0.5 1.0
_,-/·-i
-0.5:__,_J
--
----
----
-
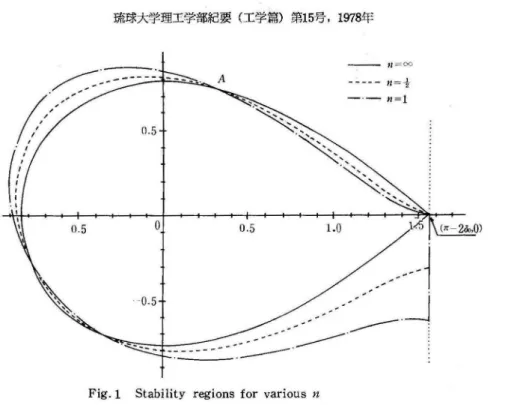
---Fig. 1 Stability regions for various n
Fig. 1 shows the stability regions obtained for the admissible values of n. The system parameters are given as M=l, D=0.2and ilo=45°.
The surface V=Vc passing through the unstable equilibrium state, together with the part of the plane perpendicular to the x-axis with negative x, gives a stability region. An intersecting point A in Fig. 1 is calculated by equalizing two stability boundaries, which are arbitrarily chosen in the limited range of n. Thus, the point A always exists on a curved line
(7) where,
Xc= " - 2oo (8)
Although only three curves are illustrated in Fig. 1, the other stability boundaries depending upon the value of n exist between curves (i) and (ii). When n is infinite. the obtained Lyapunov function corresponds to Gless's function3)and the Lyapunov function (energy function) which is constructed by the authors' method is of this type.
If a system disturbance occurs on a transmission line, the solution trajectory generally lies in the first or third quadrant. Hence, the energy function is often superior to the other Lyapunov functions.
3. Single-machine system with velocity governor
3. 1 Stability region
In this case, the swing equation for the prefault condition is given by2)
;:1 +D~1
+x2--!-j(x1)= 0x2=gx1-ax2
where,
108 Transient Stability Regions of Power Systems /Cx1)=sin (x1+oo) -Pi
The additional state variable x2 corresponds to the governor power, while g(=0.1) and a(=0.002) are the parameters of the governor, which is approximated by a single time constant.
According to the previous paperY the system equation (9) is rearranged in the
form
(
! :
J
::
+l
-
D
0~
[~
1
) + [f
Cx1) ) = [ 0 ) g 1 1 x 2 ax2 0 (10)A modified system obtained by multiplying both members of eqn. (10) by 2 x 2 nons;ngular matrix Q is considered; that is
[
Q11 Q12)f['1
Q21 Q22 .
l
0o
\
~1
1 + r Do
)
[
~1
l
+ r/(X1))l
=l
o
J
0
J
x 2 J \- g 1 x 2 \ ax2f
,
0 The generalized momentum P(x,.i:) and the generalized potential force F(x) becomeP (x,x) [ ::: ::: ] [
~
:)[~:
JF (x) = [ :::
:::
I
[
/~
::)
J
For a line integral of eqn. (12) to be independent of the path of integration, we obtain
Q21 0
Q12
In consideration of the above relation, the Rayleigh dissipation function W(.i:) is
W (x) =
t
(x1~2)
[ Qu Q12 ) [ D 0~
('~1
J
Q21 Q22 - g 1 ) X2
(D+ : ) Q11
Q22
In order that W(i-) be a positive semidefinite, the conditions
Q11
>
0 • Q22>
0(D+!) Qn q22
-
+!}
qu+gq22j2
;::::
o
must be satisfied. Eqn. (16) reduces to
__L
lg
+
2D~
/ 4D(D+__g_)
·-
-
~
qu :::;; Q22 g2 a .. ·. . · V . , a :::;; i2 ·f!·
··
+
2D+ v /4D CD+:)l
Q11 Here, we choose Q22 as Q22 = - 1 -g2l
g / gr
a-+ 2 D-v 4D CD+a -)!
Now, the Lyapunov function becomes
·
r
1 • 2 aR 2v
(x,x) = Qtt L~2 x1 +-
-z
x2+
r
~:
J
(11) (12) (13) (14) (15) (16) (17) (18) (19)where,
R = ; 2
~
!
+ 2
D-v/ 4DCD+
! )
l
Choosing qu as
1
D
we obtain the Lyapunov function
V ( · 1 • 2 aR 2 1
JX1
f
X,x) = 21JXl -1- -2D X2+
---rJ
0 (Xt)dxt (20) (21) (22)On the other hand, another Lyapunov function has been obtained by Pai et al. using Popov's method. In case of using Popov's method, the system equation (9) is rewritten in the form
Xt 0 1 0 Xt
+
;
X2 0 -D -1 X2f
(a)xa
0 g -a X a X1 (23) a = (1 0 0) X2 X aNotice here that x1 = x2 and x3 now becomes the state variable corresponding to the governor power.
Using transformation
s
s
+
awhere,
eqn. (23) reduces to the form
I
~~
j
[.
o
l
?2
= . -(aD+g)~ = - f(a)
- (a+1D) ) [
~:
j
-
[
~
I
f(a)ab
~a
gll
~:
I
+
aD : g ¢For the system given by eqn. (25), the Lyapunov function obtained by Pai et a!. is
~ ~T V (x,;,a) = Cx
0
B>r
~
1
(J+
--jy-J
0 f(a)da where,_jf
_
l
(a+D)2+
1l
g(a+D) 0 2D aD+ g 2D(aD+g) B* = g (a-t-D) g 0 ZD(aD+g) 2D(aD+g) 0 0 ·-2(aD+g) a ... (24) (25) (26) (27)110 Transient Stability Regions of Power Systems
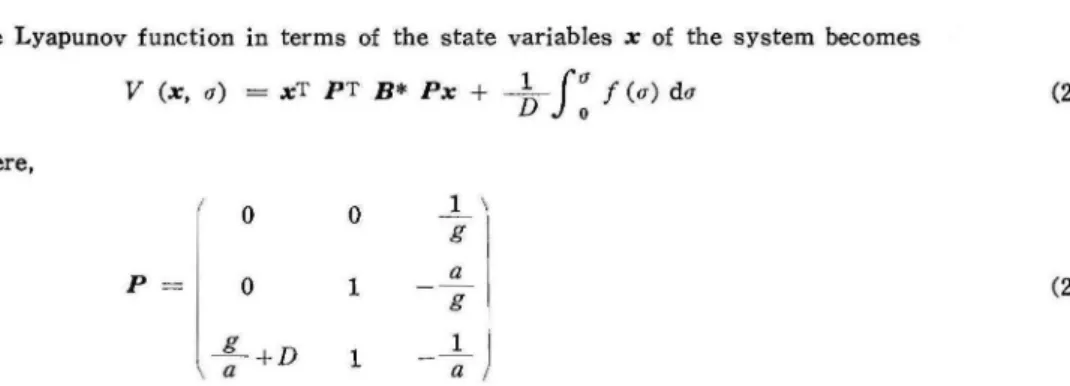
The Lyapunov function in terms of the state variables x of the system becomes
V (x, a) = xT PT B* Px
+
-
1
J:
f
(a) da where, 0 0l
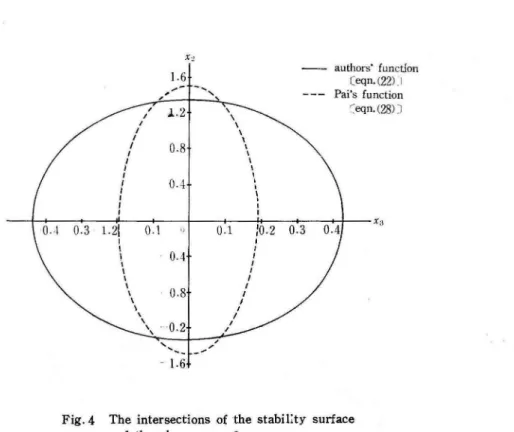
g p 0 1 a g Jf-+D 1 1 a a (28) (29)The stability regions guaranteed by eqn. (22) and (28) are shown in Figs. 2, 3 and 4. The state variables x2 and xa in these figures are corresponding to the variables X1 and x2 in eqn. (22), respectively. The intersections of the plane x3 = 0 of the two Lyapunov functions are sketched in Fig.2. A solid line shows the Lyapunov function {eqn. (22)} given by authors' method and a broken line shows the Lyapunov function {eqn. (28)} given by Popov's method. Figs. 3 and 4 are related to the intersections of the plane x 2 = 0 and x1 = 0, respectively. As shown in these figures, there is no superiority between two Lyapunov functions, being concerned with stability region.
-1.6
X2:
1.6 authors' function (eqn.\22)
----
Pai's function(eqn.(28)J 0.8
'
'
\•
\ \ 0 4 \ \ I I I I 0.4 0 0.4 0.8 1.2 1.6 2.2 2.4 -0.4Fig. 2 The intersections of the stability surface and the plane xa = 0
--
---X;\o.s
0.4 0.3 0.2 ---0.1 0 I! . 0.4 0 -0.1 0.2 --- 0.5 ---0.4O)i.--
·
t·
:
t
---
---authors' function Ceqn.(22)J Pai's function ---1: eqn. <28))---.,
...
,.
1.6 2.0 2.4 x,.Fig. 3 The intersections of the stability surface and the plane x2 = 0
).6 0.8 0.4 0.3 1.21 0.1 I I I 0.4 0.8
'
' ,_ - 1.6 0.1 10.2 -0.3authors· function
(eqn.(22U Pai's function
Ceqn.(28)J
Fig. 4 The intersections of the stabil:ty surface and the plane Xt = 0
112 Transient Stability Regions of Power Systems
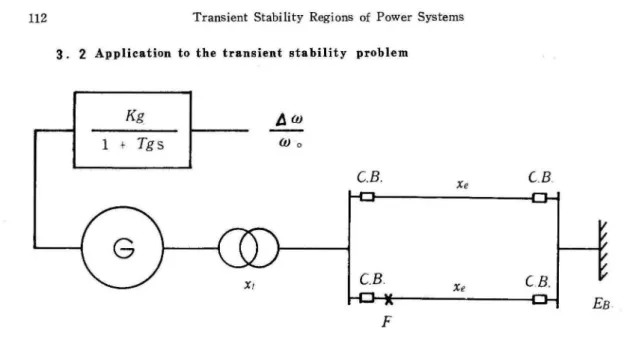
3. 2 Application to the transient stability problem
Kg
1
+
Tgs
W oC.B
.
XeCB.
C.B
.
XeCB.
Es
F
Fig. 5 Power system under consideration
In this section. the authors' method is compared with Popov's method from the point of
view of the critical reclosing time.
A single-machine system connected to an infinite bus taking into account saliency of the
generator is represented by where, Xt + a1 Xt
+
a2 x2 + aaf' Cxt) X2 = bt ~1 - b2 X2 D at=!vr
J(gu
--;;-
T
£
Po = Pt sinrio Eq'EB Pt = X12+Xd' ' 1Tg
0According to authors' method, the Lyapunov function is obtained as • 2
1 Po
!
cosn0- cos
V(x,x) = 2-xt
-
Pt aa Xt + as (xt+rlo)p2
l
COS 2.rlo-COS 2 (XI +i)o)
~
R
'
- ~as + -2
where,
R' = 1
i
(
2
a
t+
b.~
)
-z./
/~
1
(at+b
-
1iz--;-)
(
-
61
'
2' ( . . b2 v b2 JIn order to use Popov's method, eqn. (30) is rewritten in the form
,
;1
1
0 1~
:: J 0 - at 0 Ct 0 -a2 -c2 0+
- aa f'(rr) 0 (30) 2 b2 X2 (31)( x::t
l
a= (100)
(32)
where, Xt = x2 and xs becomes the state variable corresponding to the governor power again. The Lyaqunov function constructed by Popov's method is obtained as
V(x,a) = xT PT B* Px
+
_1_ Ja f'(a)da Ot 0 (33) with 02 Ct (a1+c2) 2 +1l
a2c1 a1 +c2 02a1 as Ca1c2 + a2c1) 2at as a1c2+a2Ct
B*= a2c1 a1+c2 a2c1
1
02at as a1c2 +a2c1 2at as a1c2+a2Ct
0 0 2(atc2 + aac2 a2c1) 0 0 1 Ct p 0 1 -~ Ct a1c2+a2cl 1 ~ as c2 a a c2as
The following numerical examples are presented in this section. The values of the system parameters are given in Table 2.
Table 2. System constants
xd = 1.0
XL2 = 1.12 M = 0.0138
Xg
=
0.6Eq'
=
1.208 En = 1.0A symmetrical three-phase fault to ground is assumed at point F in Fig. 1. The faulted line :s disconnected after 0.1 second and is reclosed subsequent to time t0 •
Under these conditions, the critical reclosing times <c(=0.1+t0
J,
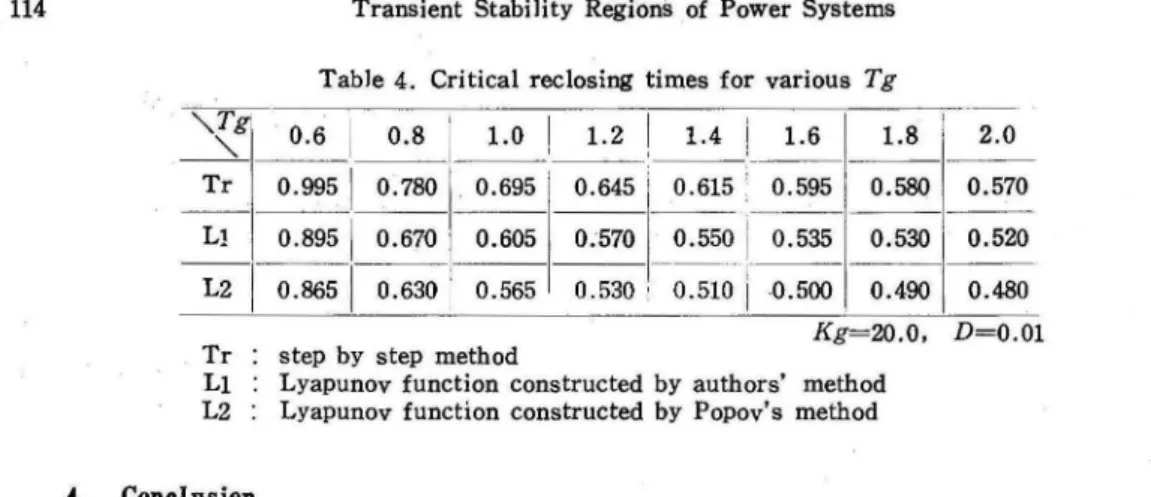
in which the system willreturn to a stable state, is determined by using two Lyapunov functions {eqns. (31) and (33)} . The critical reclosing times for the various system conditions obtained by varying Kg and Tg
are computed. The results are given in Tables 3 and 4, respectively. The results reveal that the Lyapunov function {eqn. (31) } constructed by authors' method is superior to the Lvapunov function {eqn. (33) I obtained by Popov's method.
Table 3. Critical reclosing times for various Kg
"-,.Kg ;
~
-
2.5 5.0 7.5 10.0 12.5 Tr 0.550 0.645 0.785 1.005 1.460 ·-. ---L1 0.535 0.625 0.760 0.980 1.430 -- ·- -L2 Tr L1 L2 0.475 0.560i
0.695 0.920 1.375 ' Tg=O.l. D""'0.01step by step method
Lyapunov function constructed by authors' method Lyapunov function constructed by Popov's method
114 Transient Stability Regions· of Power Systems
Table 4. Critical reclosing times for various Tg
'"-~T"'g,----,---~---,-~---,--j--,-j ----c~---,~--,...---· _"-_,_1_ 0_._6_ 0.8 1.0 ' 1.2 , _1_.4_: _ _ 1._6 _ __ 1_.8_ 2.0 Tr 0.995 1 0.780 0.695 0.645: 0.615 ; 0.595 0.580 0.570 - - -'1- - --'-- - -- - -- - - - -L! 0.895 1 0.670 0.605 i - - -1-- - -0.8651 0.630 0.565 0.570 0.530
o.sso 1 o.535 o.530 o.52o
-- o.s1o 1 o.5oo o.49o 0.480.
L2 Tr L1 L2 4. Conclusion Kg=20.0, D=0.01 step by step method
Lyapunov function constructed by authors' method Lyapunov function constructed by Popov's method
The Lyapunov function obtained by authors' method has been compared with other Lyapunov functions. In the problem of estimation of critical reclosing time, the proposed function offers better results because of the path of solution trajectory. Hence, one may use the proposed function for the power system stability problems.
Furthermore, since the construction procedure of the authors' Lyapunov function is easy,
such Lyapunov funct:on is considered to be practical.
1
References
Tsuneo Taniguchi and Hayao Miyagi : 'Denryokukeito no Lyapunov Kansu Kosei no Ichihoho',
Trans. of The Institute of Electrical Engineers of Japan, 1977, Voi.97-B, No.5, pp. 271·278
2
:
.
M.A.Pai, M.Ananda Mohan and J.Gopala Rao: 'Power System Transient Stability RegionsUsing Popov's Method', IEEE Trans., 1970, Vol.PAS-89, pp. 788·794
3 G.E.Gless: 'Direct Method of Lyapunov Applied to Transient Power System Stability', IEEE
Trans., 1966, Vol.PAS-85. pp. 159-168
4 N.Dharma Rao : 'Routh-Hurwitz Conditions and Lyapunov Methods for the Transient-Stability
Problem', Proc. lEE, 1969, Vol-116, (4), pp. 539-547