IIIIII 特集:理論化・モデリング その 1 IIIIII (解説)
小型ソーラー電力セイル実証機
IKAROS の薄膜セイル展開挙動
奥泉 信克
1・白澤 洋次
2・宮崎 康行
3・森 治
2Deployment Dynamics of a Thin Film Solar Sail of "IKAROS"
Nobukatsu OKUIZUMI
1, Yoji SHIRASAWA
2, Yasuyuki MIYAZAKI
3and Osamu MORI
2Abstract
IKAROS is a small solar power sail demonstration spacecraft developed by JAXA. The spacecraft launched on May 2010 succeeded in deploying a thin solar power sail membrane with 14 meters in width and 7.5 micrometers in thickness. The membrane was folded and wrapped around the spacecraft and unfurled by centrifugal force in two stages. Since the deployment test of the large thin membrane is impossible on the ground, a huge amount of numerical simulations were performed before launch by employing the multi-particle system model (MPM) and the nonlinear elasto-dynamic finite element analysis (NEDA). MPM approximates a thin membrane with a spring-mass-damper system and enables fast numerical simulations. NEDA is based on the energy momentum method which preserves the total energy, the linear momentum and the angular momentum and enables reliable simulations of flexible multi-body systems. In this paper, their numerical results are compared with flight data and the deployment behaviors of the membrane are discussed.
1. はじめに
ソーラーセイルとは,大きな面積の帆で太陽光を受け ることによって発生する微小な力を利用して推進する宇 宙機である.ソーラーセイルのコンセプトは,ロシアの ロケット科学者ツィオルコフスキーによって1921 年に提 案された.しかし,太陽輻射圧は微小なため,有効な加 速度を得るには極めて軽量で大面積の反射膜を展開する 必要がある.極薄で宇宙環境に耐える膜材や軽量な大型 展開構造・機構などの研究開発が進展した近年になって, 実機の研究開発が世界で活発化している.JAXA でも, ソーラーセイルとイオンエンジンのハイブリッド推進に よる将来の木星・トロヤ群小惑星探査が提案され,研究 開発が進められている. 研究中のソーラーセイルの技術実証のため,金星探査 機「あかつき」に相乗りする機会を得て,小型ソーラー 電力セイル実証機IKAROS の開発が 2007 年にスタート した.わずか2 年半の開発期間を経て,IKAROS は 2010 年5 月 21 日に打ち上げられ,14m 四方のソーラーセイ ルの展開と太陽光圧による加速実証に成功し,世界初の ソーラーセイル宇宙機となった1). 本稿では,まずIKAROS のソーラーセイル展開構造を 紹介する.次に,セイル膜面の遠心力展開挙動の数値シ ミュレーションに用いた2通りの解析法について説明す る.最後に,実機の展開挙動とシミュレーション結果と を比較して得られた知見をまとめる.2. IKAROS のソーラーセイル展開構造
2.1 ソーラーセイルの概要 ソーラーセイルの基本的な展開方法として,伸展式の ブーム(支柱)を伸ばすことによって折り畳まれたセイ ル膜面を展開するブーム型,宇宙機全体またはセイル膜 面のみを回転させ,遠心力によって膜面を展開するスピ ン型,およびそれらを組み合わせたハイブリッド型が提 案されている.欧米では,比較的堅実なブーム型が主に 研究されているが,JAXA では将来の大型セイルに有効 と考えられるスピン型を主に研究しており,IKAROS で 1 宇宙航空研究開発機構 宇宙科学研究所 〒252-8510 神奈川県相模原市中央区由野台 3-1-1Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency, 3-1-1 Yoshinodai, Chuo-ku, Sagamihara, Kanagawa 252-8510, Japan
2 宇宙航空研究開発機構 月・惑星探査プログラムグループ 〒252-8510 神奈川県相模原市中央区由野台 3-1-1
JAXA Space Exploration Center, Japan Aerospace Exploration Agency, 3-1-1 Yoshinodai, Chuo-ku, Sagamihara, Kanagawa 252-8510, Japan
3 日本大学理工学部航空宇宙工学科 〒274-8501 千葉県船橋市習志野台 7-24-1
Department of Aerospace Engineering, College of Science and Technology, Nippon University, 7-24-1 Narashinodai, Funabashi, Chiba 274-8501, Japan
その1方式の実証を行った. IKAROS のソーラーセイルの概要を Fig. 1 に示す.セ イル膜面は,4 枚の台形ペタルからなる一辺約 14m の正 方形状で,膜材は厚さ 7.5m のアルミ蒸着ポリイミドフ ィルムである.各ペタルは,幅約 1m の膜材を貼り合わ せることによって製作されている. ペタル同士は,着脱が可能なように面ファスナーを用 いたブリッジと呼ばれる矩形膜で接続されている.各ペ タルの中心側と外周側の角部4カ所には,テザーユニッ トと呼ばれる厚膜構造を介してテザー(Kevlar ケーブル) が接合されている.セイルと機体は16 本のテザーで立体 的に結合され,外周の四隅にはそれぞれ質量 0.5kg の先 端マスがテザー2本ずつで連結されている.膜面上には, 発電実験用の薄膜太陽電池セル,姿勢制御実験用の反射 率可変液晶デバイス,軌道上の微粒子計測用のダストカ ウンタが貼付されている.また,薄膜の亀裂伸展防止の ため,ペタルの外周や内側にはカプトンテープによる補 強が施されている.このソーラーセイルは,太陽輻射圧 を受けるだけでなく,薄膜太陽電池による発電も行うた め,JAXA では「ソーラー電力セイル」と呼んでいる. 2.2 折り畳み展開方法 Fig. 2 にセイルの折り畳み方法の概念図を示す.4つの Fig. 2 Folding of square membrane
Make four trapezoids separately
Accordionfold into strips
Attach four strips
Wind up around a cylinder
Fig. 1 Solar power sail of IKAROS
1 5 5 5 5 5 5 5 5 5 5 1 5 5 5 5 5 5 5 5 5 5 1 3 5 5 5 5 5 5 5 5 5 5 1 3 5 5 5 5 5 5 5 5 5 5 1 3 5 5 5 5 5 5 5 5 5 5 1 3 5 5 5 5 5 5 5 5 5 5 1 5 5 5 5 5 5 5 5 5 5 1 5 5 5 5 5 5 5 5 5 5 Polyimide film Thin film solar array Reflectivity control device Tip mass Bridge Tether Dust counter 14m Kapton tape
Fig. 3 Deployment sequence Separated from launch vehicle Spin down 5rpm 1-2 rpm Tip-mass separation
(a) Tip-mass separation (release of launch lock)
Rotation guide
(b) First stage deployment
Spin up 25rpm
Rotation of four “rotation guides” against main body
5-6 rpm Four strips of folded
membrane are extended quasi-statically.
(c) Second stage deployment
Four “rotation guides” are lay down.
Membrane deploys dynamically. Deployment is completed. 1-2 rpm Bundle of folded membrane Rotation guide
台形ペタルをそれぞれを28cm 間隔(最内周は 14cm)で 18 回蛇腹折りし,短冊状にする.次に,それらをくの字 に折り曲げてブリッジで十字型に接合し,セイル中心部 をテザーで機体に結合する.そして4つの枝を収納円筒 に巻き付け,回転ガイドと呼ばれる展開制御用の 4 本の 円柱でセイルを側面から押さえて拘束する.最後に外側 のテザーを先端マスに接続して機体に固定する. Fig. 3 にセイルの遠心力展開法を示す.展開は主に2段 階で行われる.まず,IKAROS は中心軸周りにスピンし た状態でロケットから分離される.スラスタを噴射して 回転数を調整した後,スピンによる遠心力の下で,まず 先端マスを機体から分離する.次に,回転数を増加した 後,収納円筒の周囲を回るように回転ガイドを本体に対 して相対回転させる.それによって4本の枝を遠心力に よって準静的に繰り出し,セイルを十字形状に伸展する (一次展開).このとき,慣性モーメントの増加のため回 転数は低下する.その後,回転ガイドを倒してセイルの 拘束を解放すると,蛇腹折りされたペタルが動的に展開 され,セイルが正方形状に広がる(二次展開). この折り畳み・展開方法は,セイル膜面の製作しやす さやそれまでの研究実績などを考慮して,複数の候補の 中から選定された.
3. 展開挙動の数値解析モデル
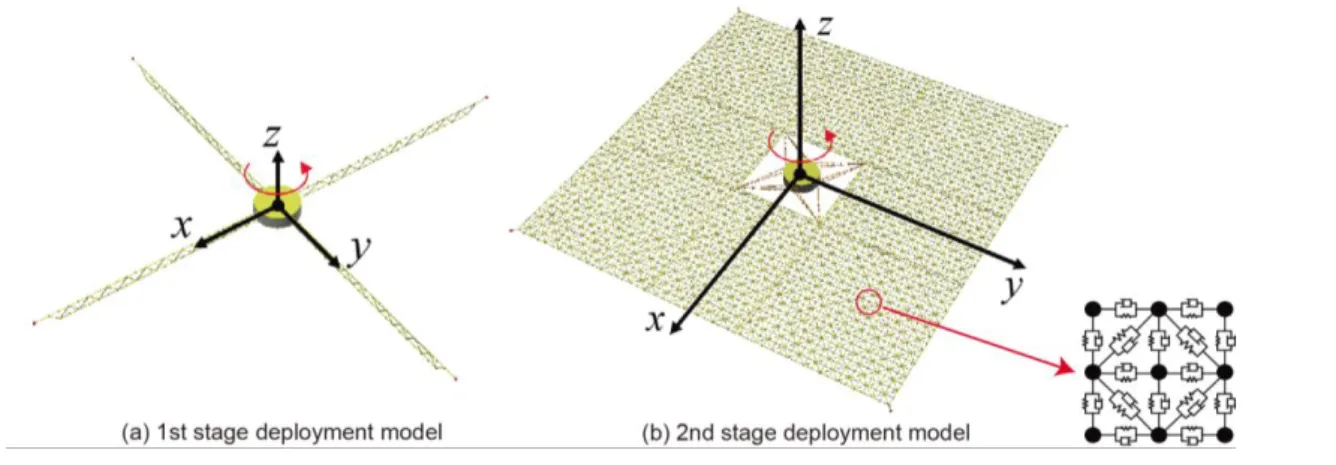
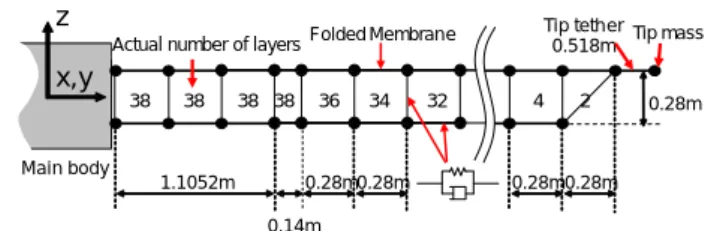
3.1 はじめに 太陽電池パネルやアンテナなど,通常の宇宙展開構造 物の展開挙動は,展開機構の動作確認を主な目的とした 重力補償下での地上試験において検証される.しかし IKAROS の場合,展開機構はともかくとして,実機サイ ズの膜面の動的展開挙動の地上試験は,空気抵抗や重力 の影響が支配的となり不可能である.約 1/30 のサイズの 小型膜面モデルによる二次展開実験 2) は行っているが, 膜のサイズと曲げ剛性との比が実機と大きく異なること などから,その結果から実機の挙動を正確に推定するこ とは困難である.そのため,実機サイズのセイル展開挙 動の検証は,主に数値シミュレーションによって行った. 一次展開については,回転ガイドが計画通り動作し, 4本の枝が準静的に滑らかに繰り出されれば,機体のバ ランスが失われることなく,安定してセイルを伸展でき ると予想された.一方,二次展開については,動的展開 に伴ってセイルが大きく振動して本体に接触したり,機 体の角運動量がセイルに奪われて姿勢異常が起きないか など,検証すべき多くの課題があった. 展開シミュレーションに使用した主な解析プログラム は,JAXA と大学の IKAROS 構造系開発メンバーの自作 によるもので,1つは膜面をばね・質点・ダンパ系で表 現する多粒子系モデル,もう1つは膜要素や剛体要素を 含む柔軟多体有限要素モデルである.多粒子系モデルで は一次展開と二次展開,柔軟多体有限要素モデルでは二 次展開のシミュレーションを行った.これらの他に,先 端マス分離のシミュレーションに汎用非線形有限要素解 析ソフトABAQUS を,一次展開には自作の伸展梁要素に よる有限要素モデルも利用した.これら複数の方法によ る結果を比較することによって,シミュレーション結果 の妥当性を確認した.以下では,多粒子系モデルと柔軟 多体有限要素モデルについて説明する. 3.2 多粒子系モデル 3.2.1 概要 薄膜の力学を取り扱うときの基本的な考え方は,薄膜 の曲げ剛性は微小なため無視でき,面内の引っ張りに対 しては膜材の剛性による復元力が働くが,面内の圧縮に 対しては殆ど抵抗力を持たない(座屈する)とするもの である.多粒子系モデル(MPM: Multi-Particle system Model)は,面内剛性と圧縮特性を表すばね,質点および ダンパからなる二次元ネットワークによって膜面を近似 的にモデル化する.膜構造の大変形挙動の高速なシミュ レーションのために提案された 3).陽解法である Runge-Kutta-Gill 法によって高速な計算ができる一方,定量的 な精度や複雑な構造物への適用などにはまだ課題があり, 小型の膜面を用いた実験との比較によるモデルの有効性 の検証や改良が筆者らによって進められている2,4,5). IKAROS のセイル展開シミュレーションでは,シンプルさと高速性を活かして,多粒子系モデルを主に活用し た.一次展開モデルと二次展開モデルをFig. 4(a), (b)にそ れぞれ示す. 3.2.2 一次展開モデル Fig. 5 に一次展開モデルの詳細を示す.一次展開モデル では,多層に折り畳まれた膜面を一体の構造とした.各 ばね定数は,膜材のヤング率をもち膜厚×層数の厚さの 膜面の一次元的な引っ張り剛性から求めた.各質点の質 量は,膜材だけでなくセイル面上の搭載物を含めた質量 分布に対応した値を与えた.ダンパは,ばねの長さの変 化速度に対する比例減衰とした.薄膜の圧縮時の剛性低 下を考慮するため,ばねの張力 T を次のように仮定した.
0 0 0 0 L L L C L L K L L L C L L K T (1) ここで,Kはばね定数,L, L0はばねの現在の長さと自然 長,C はダンパの減衰係数, は圧縮時に適用する微小 な係数である.多層膜の曲げ剛性は,実験や有限要素解 析との比較によって影響が小さいと考えられたため無視 している.実証機本体は,実機の質量特性を有する剛体 とした. 以上のようにして,一次展開中の構造全体を表すば ね・質点・ダンパ系の運動方程式を構成した.シミュレ ーションには,できるだけフライトモデルの実測値を用 い,膜面が本体の周りに固定されて全体が一定回転して いる状態を初期条件とし,セイル先端側から順番に質点 の拘束を解放していくことにより行った. 3.2.3 二次展開モデル 二次展開の場合には,膜厚 7.5m の膜面を模擬するば ね・質点・ダンパ系でセイル膜全体をモデル化した.各 ばねのばね定数は,面内変形時の膜材の歪みエネルギー と多粒子系モデルのばねに蓄えられるエネルギーが等し くなる条件から求め,圧縮時の特性を式(1)のように与え た.各質点の質量は,膜材と膜面上搭載物の質量分布に 一致するように与えた.膜面の折り目の特性や曲げ剛性 は,実サイズでの展開挙動に与える影響が小さいと考え て無視した.膜面上搭載物の曲げ剛性は膜材に比べて非 常に高いが,多粒子系モデルの原理上導入しにくいため, 有限要素解析において考慮することにした.膜面同士の 接触も,正常な展開中はあまり起こらないこと,計算の 煩雑さや速度低下を考慮して無視した.テザーは,実際 に使用するKevlar の物性値を用いて,一次元のばね・質 点・ダンパ系でモデル化した. シミュレーションは,十字形状に対応して質量を配置 し,回転ガイドで拘束される位置の粒子を本体に拘束し て一定回転している状態を初期状態とし,そこから拘束 を解放することにより,動的な二次展開を行った. 多粒子系モデルでは,膜面の応力分布などの定量的評 価は難しいが,膜の圧縮剛性や減衰などの未知パラメー タの展開挙動に対する感度を調べたり,機体の質量特性 や初期ニューテーションなどが異なる様々な条件下で, セイルの展開挙動や振動,機体の角速度や姿勢角の変動 などを確認するための,膨大な量のシミュレーションを 実施することができた. 3.3 柔軟多体有限要素モデル 柔軟な膜面やケーブルと剛な機体などを同時に含む宇 宙構造物のダイナミクスの有限要素解析は,非線形性が 強く硬い問題となる.こうした問題を扱うため,柔軟多 体有限要素モデルのエネルギ・モーメンタム法に基づく 陰 解 法 (NEDA: Nonlinear Elasto-Dynamic Analysiscode)が宮崎らによって研究されている 6,7).この方法で は,外部から力やモーメントが作用しなければ,全エネ ルギー,運動量,角運動量を厳密に保存した計算を行う ことができ,ダイナミクスの安定性を正しく評価できる. そこで,NEDA をもとにして IKAROS の二次展開の詳細 なシミュレーションを行った. 柔軟多体有限要素モデルでは,膜面,テザー,機体, 先端マスを,それぞれ膜要素,ケーブル要素,剛体要素, 質点要素によってモデル化した.Fig. 6 にセイル膜面の要 素分割を示す.計算時間の短縮のために精細とは言えな いが,全体的な展開挙動の解析には十分である.この膜 要素では,引張,皺,たるみの3つの応力状態を判別し て精度良く表現できるように,構成方程式が修正されて いる.減衰には応力速度比例型のモデルを導入した. また,多粒子系モデルでは無視している膜面上搭載物 の曲げ剛性や折り目の特性を,対応する節点領域に与え た.折り目の特性は,基礎的な実験結果に基づいて回転 2 1.1052m 0.28m 0.14m Main body 0.28m 0.28m0.28m Tip teth er 0.518m 0.28m z x,y 4 32 36 34 38 38 38 38
Actual number of layer Folded Membrane Tip mass
Fig. 5 Detail of first stage deployment model
Actual number of layers
ばねでモデル化して導入した.その他にも,Fig. 8 に示す ように,テザー接着部,ブリッジ,亀裂伸展防止テープ を,膜要素,バー要素,ケーブル要素でそれぞれモデル 化し,それらの影響を考慮した. 柔軟多体有限要素モデルによるシミュレーションでは, 詳細なデータを得ることができる反面,陰解法に基づい ていることもあり計算時間がかかる.上記の詳細なモデ ル化とともに,実機開発のペースの速さに追従できるよ うに計算の高速化を図るため,MPI ライブラリを用いた 並列計算を新たに導入した.その結果,並列化しない場 合と比較して計算時間を 25%以下に削減でき,膜面の強 度設計に必要となる展開時の応力の評価や,多粒子系モ デルによるシミュレーション結果の妥当性の確認のため の比較対象として用いることができた.
4. フライト結果と数値解析結果の比較
4.1 一次展開 以下では,主なフライト結果とシミュレーション結 果を比較する. 打ち上げ前に行った,多粒子系モデルによる一次展 開のシミュレーション結果例を Fig. 8 に示す.回転ガ イドの相対回転に従ってセイルが伸展され,570 度回 転すると伸展が終了する.フライトでは,繰り出しを 11 回のシーケンスに分割し,機体の姿勢角変動や機体 側面に搭載した4台の固定カメラ画像を確認しながら, 慎重にシーケンスを進めた.Fig. 9 に第 8 シーケンス 終了後に撮影した固定カメラ画像を示す.太陽の方向 の違いのため見え方が異なるが,折り畳まれた形状を 維持したまま,4本の枝がほぼ同様に伸展されている ことが確認できる. 次に,一次展開中の機軸(Z 軸)周りのスピンレー ト変化をFig. 10に示す.縦軸は,機体に搭載されたジ ャイロで計測された Z 軸周りのスピンレート,横軸は 回転ガイドの回転角である.伸展に伴う慣性モーメン トの増加によりスピンレートが減少する.当初の解析 結果(緑線)はフライト結果(赤線)よりやや減少が 遅かったが,モデルの質量分布を修正することにより 一致させることができた(青線). 各シーケンスの繰り出し後には多少の残留振動が発生 する.第10 シーケンス後のスピンレートの振動を Fig. 11 に 示す.フライトデータ(赤線)の振動の減衰比を計算し た結果,0.0127 となった.多粒子系モデルのダンパは膜 面直交方向の振動には効果が小さく,この減衰は表現で きていなかった(緑線)が,セイル根元に回転ダンパを 追加してフライト結果に近づけることができた(青線). Fig.7 Finite element of tether unitCenter tether Petal Spacecraft main body Finite element of tether unit FE mesh of petal H&L fastener Bridge
Fig. 8 Simulation of 1st stage deployment
0 deg 21 deg 246 deg
336 deg 381 deg 570 deg
Fig. 9 Photos during 1st stage deployment
CAM-H1
CAM-H2
CAM-H3
CAM-H4
CAM-H1
CAM-H2
CAM-H3
CAM-H4
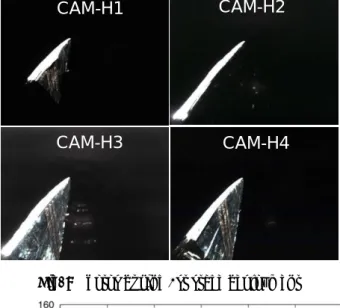
また,各シーケンス後の残留振動の周波数解析を行った 結果,一次展開中のセイルの剛性は多粒子系モデルより もかなり高いことが明らかとなった. 最後に,一次展開完了後の固定カメラ画像(Fig. 12) により,4本の枝が非対称に伸展されていることがわか った.これは,回転ガイドはセイルの半径方向への展開 を拘束するだけで,周方向には拘束できないため,セイ ルの周方向への滑りが生じたためと考えられる. 4.2 二次展開 次に,多粒子系モデルと柔軟多体有限要素法による二 次展開のシミュレーション計算の比較例をFig. 13 に示す. 展開後の振動減衰の速さに違いがあったが,展開開始か ら最終形状に至る全体的な挙動はよく一致した. 実際の二次展開の初期状態はFig. 12 の非対称形状とな ったが,そのまま展開可能と判断し,二次展開を実行し た . 展 開 後 に 機 体 か ら 分 離 さ せ た カ メ ラ で 撮 影 し た IKAROS の全景と固定カメラ画像を Fig. 14, 15 にそれぞ れ示す.これらの画像からセイルが完全に展開されたこ とが確認できた. しかしながら,展開中の固定カメラ画像とスピンレー トデータを確認した結果,回転ガイド解放後しばらくの 間,膜面の一部が展開していなかったことが判明した.
(a) Multi-Particle Model
(b) FEM Model
Fig.13 Simulations of 2nd stage deployment 0.0sec 1.0sec 2.0sec
3.0sec 5.0sec 100.0sec
0.0sec 1.0sec 2.0sec
3.0sec 5.0sec 100.0sec
Fig.14 Photos after 2nd stage deployment
Fig 15. Overview of IKAROS in space Fig. 11 Damping of spin rate after #10 of 1st stage
32 33 34 35 36 37 38 3200 3300 3400 3500 3600 3700 Time[s] sequ en ce #10 ωz [d e g /s ] MPM with ou t dampin g Fligh t Data MPM with dampin g
Fig.12 Photos after first stage deployment
CAM-H1 CAM-H2
Fig.16 に二次展開中の固定カメラの連続画像を示す.展 開開始後9 秒から 13 秒の間,1 台のカメラ(CAM-H2) にセイルが写っておらず,25 秒まで正常に展開していな かったことが分かる.二次展開中のスピンレートデータ と有限要素モデルによるシミュレーション結果の比較を Fig. 17 に示す.フライトデータ(赤線)では,展開開始 から20 秒過ぎに一端振動が中断し,数秒後に再び振動が 始まっている.シミュレーション結果は,振動の周期と 減衰をフライト結果に合うようにチューニングしたもの だが,振幅の変化はフライト結果と一致せず(緑線),時 間を18 秒前にシフトするとフライトデータの後半とよく 一致する(青線).このことは二次展開の最初の約 25 秒 まで異常があったことと整合している.この現象の原因 として,本稿では説明を省略したが,折り畳まれたセイ ルが打ち上げ時の振動で崩れないように追加した保持部 材の離脱不良が考えられるが,一次展開後の非対称形状 や折り畳み展開方式そのものに原因があった可能性もあ り,検討中である.
5. おわりに
小型ソーラー電力セイル実証機 IKAROS の薄膜セイル 展開挙動の数値シミュレーションとフライト結果につい て概説した.詳しくは多くの文献が出ているので参照い ただきい(例えば参考文献(8)-(10)).IKAROS の成功に より,ソーラーセイル膜面の遠心力展開挙動を実測でき ただけでなく,その後の軌道上実験により,無重力下の 大型薄膜展開構造物の力学特性に関する数多くの貴重な データを取得することができた.一次展開後や二次展開 中の非対称挙動,薄膜構造物の振動減衰や剛性,太陽光 圧を受けるセイル膜面の釣合形状とその経時変化,凹凸 のできた膜面に太陽光圧が作用して生じるスピン回転数 の変化(風車効果)など,解明すべき興味深い課題が多 数見つかっており,数値解析や小型モデルを用いた実験 などによって,現在取り組んでいる最中である. 参考文献1) O. Mori, Y. Tsuda, H. Sawada, R. Funase, T. Yamamoto, T. Saiki, K. Yonekura, H. Hoshino, H. Minamino, T. Endo, J. Kawaguchi and IKAROS Demonstration Team: “World's First Demonstration of Solar Power Sailing by IKAROS”, The Second International Symposium on Solar Sailing, New York, NY, (2010).
2) N. Okuizumi, A. Muta and S. Matsunaga: “Enhancement of a Spring-mass System Model for Numerical Simulations of Centrifugal Deployment Dynamics of Folded Square Membranes”, The 28th International Fig. 16 Photos during 2nd stage deployment
Fig. 17 Spin rate during 2nd stage deployment 0 5 10 15 20 25 30 35 0 10 20 30 40 50 60 70 80 S pi n ra te [d eg /se c] Time [sec] Flight data FEM FEM(Shifted)
Symposium on Space Technology and Science, 2011-c-30, Okinawa, June (2011).
3) 松井崇雄: 多粒子系モデルによる大型膜面宇宙構造物の動 的解析に関する研究, 東京大学大学院修士論文, (2002). 4) N. Okuizumi and T. Yamamoto: “Centrifugal Deployment
of Membrane with Spiral Folding: Experiment and Simulation”, Journal of Space Engineering, 2 (2009) 41. 5) 宮崎康行,岩井優佳: 遠心力展開膜面のダイナミクスにつ
いて,スペースエンジニアリングコンファレンス講演集, 東京, 2005, p59.
6) Y. Miyazaki and T. Kodama: “Formulation and interpretation of the equation of motion on the basis of the energy-momentum method”, Journal of Multi-body Dynamics, 218 (2004) 1.
7) Y. Miyazaki: “Wrinkle/Slack Model and Finite Element Dynamics of Membrane”, International Journal for Numerical Methods in Engineering, 66 (2006) 1179. 8) Y. Shirasawa, O. Mori, Y. Miyazaki, H. Sakamoto, M.
Hasome, N. Okuizumi, H. Sawada, H. Furuya, S. Matsunaga, M. Natori and J. Kawaguchi: “Analysis of
Membrane Dynamics using Multi-Particle Model for Solar Sail Demonstrator "IKAROS"”, 52th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, AIAA-2011-1890, Denver, CO, (2011).
9) H. Sawada, O. Mori, N. Okuizumi, Y. Shirasawa, Y. Miyazaki, M. Natori, S. Matunaga, H. Furuya, and H. Sakamoto: “Mission Report on The Solar Power Sail Deployment Demonstration of IKAROS”, 52th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, AIAA-2011-1887, Denver CO, (2011).
10) Y. Miyazaki, Y. Shirasawa, O. Mori and H. Sawada: “Finite Element Analysis of Deployment of Gossamer Space Structure”, MULTIBODY DYNAMICS 2011, ECCOMAS Thematic Conference, Brussels, Belgium, (2011).