通信周期制御によるショックウェーブ抑制手法
6
0
0
全文
(2) Vol.2013-ITS-52 No.2 2013/3/16. 情報処理学会研究報告 IPSJ SIG Technical Report. ここで,q は交通スループット,k は密度,u は観測地点の 上流,d は観測地点の下流,v は車両の速度,L は道路長,. N は車両台数をそれぞれ示す.図 2 に例を示す.図の例で は,車両 A から C が図中に示す速度と車間距離で道路上 を走行している.車両 B を通過するショックウェーブ伝播 図 1. 速度は式 2 で与えられる.. ショックウェーブが渋滞を引き起こす例. Fig. 1 Example of traffic congestion caused by shockwave. w=. qd − qu 3/10 − 20/20 = = −14 m/s. kd − ku 1/10 − 1/20. (2). 伝播抑制手法の代表的な方式に,拡張ビーコン方式 [4][7] 図 2. がある.拡張ビーコン方式では車両同士が位置,速度情報. ショックウェーブ伝播速度の計算例. に加えて車間距離,走行レーン,ショックウェーブの発生. Fig. 2 Example of shockwave calculation. 車車間通信を利用してショックウェーブ現象の発生や伝播 を抑制する手法 [4], [5] が検討されている. 本稿は,代表的なショックウェーブ伝播抑制手法である 拡張ビーコン方式と発生抑制手法である CACC 方式を併 用し,効果的にショックウェーブを低減することを目的と する.高車両密度時に両手法を併用すると無線帯域の輻輳 によりパケットロスが発生し,各車両で走行制御を行うた めの情報が不足し,ショックウェーブ抑制効果が悪化する 場合がある.本稿では交通状況と通信状況に応じて拡張 ビーコン方式と CACC 方式の通信周期をそれぞれ動的に 調整することで,効果的にショックウェーブを抑制する.. フラグや伝播速度の情報を交換し,ショックウェーブが車 両に到達する前にゆるやかに速度調整し,ショックウェー ブ伝播速度を低減する.伝播抑制手法は発生抑制手法に比 して広範囲に抑制効果を示すが,効果が小さい.. 2.2 発生抑制手法 発生抑制手法の代表的な手法に CACC[5][8][9] がある.. CACC は複数の車両が車群を形成し,小さい車間距離を 保ったまま高速移動する.先行車両と一体となって加減速 するため,車群内でショックウェーブが発生しない.その ために車両間では短周期の情報交換ならびに低キックバッ ク遅延の情報伝達が必要である.したがって,車群を形成 可能な車両台数の上限は低く 5 台から 10 台程度とされ,伝. 2. ショックウェーブ抑制手法 ショックウェーブは後方車両に伝播し,渋滞を引き起こ す場合がある.その例を図 1 に示す.図では車両 A から E が道路上を走行している.時刻 t1 に車両 A が減速し,そ の減速動作が後方車両に波として伝播していく.この現象 をショックウェーブ現象という.時刻 t2 には車両 B が減 速し,時刻 t3 には車両 C が減速する.ショックウェーブ は速度を増加させながら伝播する場合があり渋滞を引き起 こす.図の例では時刻 t3 で車両 D にも減速が伝わり,局 所的に交通スループットが低下し,渋滞が発生する. 一般的にショックウェーブ伝播速度と後続車両の減速量 の大きさには正の相関がある [6] ため,ショックウェーブ 伝播速度を抑制することが渋滞を低減するうえで重要であ る.ショックウェーブの抑制手法はショックウェーブの伝 播速度を小さくする手法(伝播抑制手法)とショックウェー ブの発生を抑制する手法(発生抑制手法)に分類される.. 播抑制手法に比して影響範囲は小さい.. 2.3 伝播/発生同時抑制のメリット/デメリット 両手法の長所短所から,効果的にショックウェーブを抑 制するためには,伝播手法と発生手法を併用することが望 ましい.しかし,伝播抑制手法と発生抑制手法を組み合わ せた方式はまだ検討されていない.特に渋滞が発生しやす い高車両密度時には,通信要件を満たせず抑制効果ならび に範囲が低下する恐れがある.拡張ビーコン方式の性能低 下時には事前の速度調整が不足し,ショックウェーブが抑 制されないまま伝播する.CACC 方式の性能低下時には 安定した車群走行を維持できず,車群安定性が低下し,加 減速動作が増幅しショックウェーブを引き起こす [10].以 上から,通信損失の影響を小さくするように,ショック ウェーブの伝播と発生を同時に抑制することが,突発渋滞 を抑制するうえで重要である.. 3. 提案. 2.1 伝播抑制手法 ある車両を通過するショックウェーブ伝播速度 w は式 1 で示される [5], [6]. qd − qu w = kd − ku 0 ∑ ∑ 1 vd (l)− 1 vd (l) = Ld l∈Nd |Nd | L|Nuu | l∈Nu Ld. −. Lu. ⓒ 2013 Information Processing Society of Japan. 本稿では,ショックウェーブの発生ならびに伝播を効果 的に抑制するため,発生抑制手法と伝播抑制手法を併用す る.通信の輻輳発生時には,通信量を制限する必要があり,. d| ( |N Ld −. |Nu | Lu. (otherwise).. = 0) (1). ショックウェーブ伝播速度を小さくするようにそれぞれの 通信性能を制御することで,ショックウェーブ抑制効果の 低下を抑える.そのため通信輻輳発生時にまず,拡張ビー. 2.
(3) Vol.2013-ITS-52 No.2 2013/3/16. 情報処理学会研究報告 IPSJ SIG Technical Report D. C. B. A. !. t1. )*)). !"!#$. "#$%&'(. D. C. B. BC. A. B’. D’. W_`a. V WH X.Y.. +,-./0. t2. cdefHg0h. 図 3 拡張ビーコン通信損失によるショックウェーブ発生例. +!,-. /0123456789. Z. C. D. B. Y. BC DH IJKLM:;NO@A. X. t1. Z. D. D’ Y. C. B. +,-./012 345678.9>?:; <=@A. A. X. DEFG. DHjJKLM :;NO@A. )*))12345678 .9:;<=. BC DPH !"#. t2. )*))12Z[\ 345678.9:;]^ NO@A. D. BC DHIJKLM :;NO@A V. A. D. !"!#$. bC. A’. Fig. 3 Shockwave caused by ExBeacon communication loss. DEFG. !"# i %&'(. !"# $ %&'(. 図 4 CACC 通信損失によるショックウェーブ発生例. )*))%&QRS T5U. Fig. 4 Shockwave caused by CACC communication loss )*. コンの性能低下によって伝播するショックウェーブ伝播速 度と,CACC の性能低下によって発生するショックウェー ブ伝播速度を算出する.そして,ショックウェーブ伝播速 度が小さくなるように拡張ビーコンと CACC の通信周期. 図 5. 情報受信時のショックウェーブ伝播速度の算出処理フロー. Fig. 5 Execution flow of shockwave propagation velocity when receiving information. をそれぞれ調整する.提案方式は通信性能低下時における. 例を示す.図では,車両 A から D,X から Z が直線道路上. 抑制効果の低下を小さくする.. を走行し,車両 A から D が車群を形成する.時刻 t1 から. t2 の間に車両 D に到達する CACC 通信を損失すると,車. 3.1 ショックウェーブ伝播速度の算出. 群は安定性を失い,車両 D の位置は通信成功時の車両 D’. 各車両は周囲の車両から情報を受信する毎に,直前に受. の位置とずれる.車両 D は CACC 通信を受信する度に周. 信した情報とあわせて各方式の通信損失によるショック. 囲車両の位置から通信成功時の車両位置を算出し,CACC. ウェーブ伝播速度を算出する.拡張ビーコン方式ならびに. 通信の損失によるショックウェーブ伝播速度を算出する.. CACC 方式の通信損失時に発生するショックウェーブ伝播 速度 wloss は,式 3 から算出する.. wloss = wactual − w. ′. ′ 車両 D における wloss を算出するとき wactual ,wCACC は. 式 6,7 から算出される.. (3). wactual =. VC /DC−D′ − VZ /DD′ −Z , 1/DC−D′ − 1/DD′ −Z. (6). ′ wCACC =. VC /DC−D − VZ /DD−Z , 1/DC−D − 1/DD−Z. (7). ここで,wactual は実車両位置から算出されるショックウェー ブ伝播速度,w′ は最後に受信した情報から予測される通信 損失が無い場合の周囲車両,自車両位置ならびに速度から 算出されるショックウェーブ伝播速度を示す. 図 3 に拡張ビーコンの損失によるショックウェーブ伝播 例を示す.図では,車両 A から D が道路上を走行し,各 車両は通信範囲内を走行し,拡張ビーコンを定期的に交換 する.時刻 t1 から t2 の間に拡張ビーコン通信が損失する と,時刻 t2 では車両 C が予測する車両 A,B ならびに D の位置や速度と実際に各車両が走行する位置や速度が異 なる場合がある.車両 C における wloss を算出するとき, ′ wactual1 ,wExBeacon は式 4,5 から算出される.. wactual. 車間距離を示し,Vi は車両 i の速度を示す. 通信損失によるショックウェーブ伝播速度算出処理は各 方式の情報受信時に受信車両が実行する.その処理フロー を図 5 に示す.受信情報が拡張ビーコンの場合,まず直前 に受信した位置,速度情報から送信車両の受信時刻におけ る予測位置,速度を算出する.次に,受信情報から送信車 両の実測位置,速度情報を更新し,拡張ビーコン損失による ショックウェーブ伝播速度を算出する.受信情報が CACC 通信の場合,まず送信車両タイプを検査する.送信車両が. VB ′ /DB ′ −C − VD′ /DC−D′ = , 1/DB ′ −C − 1/DC−D′. (4). VB /DB−C − VD /DC−D = , 1/DB−C − 1/DC−D. (5). ′ wExBeacon. ここで Di−j は図中の車両 A から Z について車両 i と j の. 自車群のリーダーの場合,受信車両タイプを検査する.受 信車両が車群メンバだった場合,受信情報から送信車両の 実測位置,速度情報を更新し,自車両の予測位置,速度を 更新し,CACC 通信損失によるショックウェーブ伝播速度. ここで Di−j は図中の車両 A から D について車両 i と j の. を算出する.受信車両が車群メンバでない場合は,何も処. 車間距離を示し,Vi は車両 i の速度を示す.. 理しない.送信車両が車群最後尾車両の場合,送信車両の. 図 4 に CACC の通信損失によりショックウェーブ発生 ⓒ 2013 Information Processing Society of Japan. 属する車群の CACC 通信損失によるショックウェーブ伝. 3.
(4) Vol.2013-ITS-52 No.2 2013/3/16. 情報処理学会研究報告 IPSJ SIG Technical Report. 播速度を更新する.送信車両が車群メンバの場合,何も処. !. 理しない.送信車両,受信車両タイプに関わらず,送信車 両との車間距離を検査し,閾値よりも小さければ CACC 接. "#""$%&'( ,)*+ "#""$%&' "#""$%&'( ))*+. 近フラグをセットする.. ()*+,-./012345 6789 :;()*+,-./0123 456789. 3.2 通信周期調整 提案方式では,各車両が自律的に伝播抑制手法と発生抑. <!=>6789. 制手法の通信周期を決定する.発生抑制手法ならびに伝播 ?@. 抑制手法の通信周期 T は式 8 から算出する. T = B × (1 + L × A × R),. (8). ここで,B は基本通信周期,L は情報損失率,A はショッ クウェーブ伝播速度係数,R は相対ショックウェーブ伝播 速度係数を示す.情報損失率 L は式 9 から算出する.. L=1−. P M,. !AB6789. !. 図 6. 情報送信時の通信周期決定処理フロー. Fig. 6 Execution flow of transmission interval decision when sending information. (9). ここで,P は受信情報数を示す.受信情報数は,車群内他. 4. 提案方式の評価と考察. 車両から受信する CACC 通信パケット数である.M は希. 提案方式をコンピュータ・シミュレーションにより既存. 望受信数を示し,単位時間に受信する CACC 通信パケッ. 方式と比較評価し,考察する.本シミュレーションでは,. ト数を通信周期と車群構成車両数から算出する.パケット. ショックウェーブ発生抑制方式と伝播抑制方式の特徴を確. 損失率が大きいほど L が大きくなり,通信周期は長くな. 認し,発生方式と抑制方式を併用した場合に,高車両密度. る.見込みショックウェーブ伝播速度係数 ACACC ならび. 時の性能が低下することを確認する.そして,提案方式が. に AExBeacon は式 10 ならびに 11 から算出する. ( ) WExBeacon − α1 ACACC = max ,0 , α2 ( ) WCACC − α1 AExBeacon = max ,0 , α2. 両手法を併用するため,低車両密度時に各方式を単独で使. (10) (11). ここで,WCACC ならびに WExBeacon はショックウェーブ 伝播速度を示し,α1 はノイズ除去値を示し,α2 は重み. 用する場合よりも高い性能を示すことを示し,高車両密度 時に通信性能の低下を改善することでショックウェーブ抑 制効果の低下を抑えることを示す.. 4.1 比較対象ならびにシミュレーション条件 事故や故障を想定し,ある車両が道路の中央で急減速. 変数を示す.α1 ならびに α2 は予備実験により決定する.. し,道路上に停車する意図的に渋滞が起こりやすい状況を. WCACC の絶対値が大きいほど拡張ビーコン通信周期が長. 作り,車両の流入量を変化させた場合に既存方式ならびに. くなり,WExBeacon の絶対値が大きいほど CACC 通信周期. 提案方式が渋滞に与える影響を評価する.. が長くなる.相対ショックウェーブ伝播速度係数 RCACC ならびに RExBeacon は式 12,13 から求める. WExBeacon RCACC = , WCACC + WExBeacon WCACC RExBeacon = , WCACC + WExBeacon. そのため,シミュレーション環境には通信シミュレータ. Scenargie 1.5[11] ならびに交通流シミュレータ MATES[12] (12). を並列実行する環境を用いた.主なシミュレーション条件 を表 1 に示す.道路モデルは高速道路を想定した信号の無. (13). い片側 2 車線の直線道路とし,道路上を走行する全車両 は無線通信機を搭載するものとした.1 台の車両は故障車. ここで,WCACC ならびに WExBeacon はショックウェーブ. を想定して,流入時に他車両と同様の走行モデルで走行す. 伝播速度を示す.WCACC に比して WExBeacon が大きいほ. るが,道路の中央で急減速し停車する.シミュレーション. ど CACC 通信周期が大きくなり,逆であれば,拡張ビー. の測定時間は 1300 秒で,測定開始から 100 から 200 秒後. コン通信周期が大きくなる.. に故障車が流入し,測定開始から 1000 秒後に車両の流入. 各方式の情報通信周期決定処理は各車両が情報送信直後. を止める.10%の車両は CACC 通信を行い,車群を形成. に実行する.その処理フローを図 6 に示す.各車両は送信. する.車群走行に必要な通信は文献 [8] に準じ,CACC 通. 後,車群近傍走行フラグを検査する.車群が近傍を走行し. 信では 78byte の情報を 20msec で交換することを想定し,. ている場合,ショックウェーブ伝播速度係数ならびに相対. CACC 通信が損失した場合は,文献 [10] のモデルにした. ショックウェーブ伝播速度係数を算出する.次に,受信情. がって走行するものとする.また,車群のリーダー車両と. 報から情報損失率を取得し,通信周期を算出する.最後に,. 車群に参加しない車両は拡張ビーコン通信を行い,ショッ. 通信周期から次回送信時刻を算出し,終了する.. クウェーブ伝播抑制を行う.拡張ビーコンは文献 [4] に準. ⓒ 2013 Information Processing Society of Japan. 4.
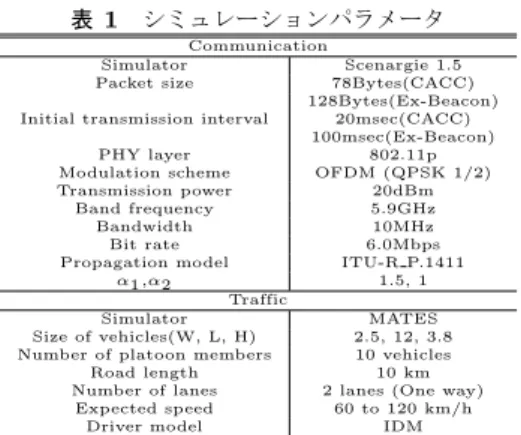
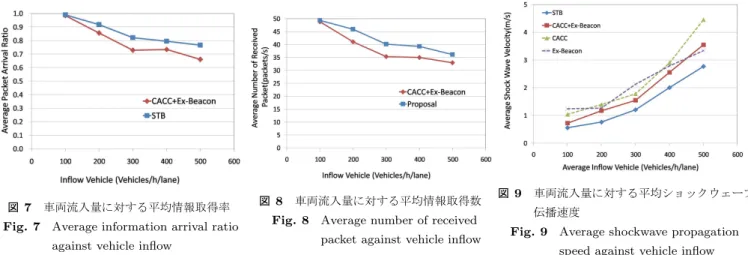
(5) Vol.2013-ITS-52 No.2 2013/3/16. 情報処理学会研究報告 IPSJ SIG Technical Report 表 1. 図 7 に車両流入量を変化させたときの車両平均情報取得. シミュレーションパラメータ. Communication Simulator Scenargie 1.5 Packet size 78Bytes(CACC) 128Bytes(Ex-Beacon) 20msec(CACC) Initial transmission interval 100msec(Ex-Beacon) PHY layer 802.11p Modulation scheme OFDM (QPSK 1/2) Transmission power 20dBm Band frequency 5.9GHz Bandwidth 10MHz Bit rate 6.0Mbps Propagation model ITU-R P.1411 1.5, 1 α1 ,α2 Traffic Simulator MATES Size of vehicles(W, L, H) 2.5, 12, 3.8 10 vehicles Number of platoon members 10 km Road length Number of lanes 2 lanes (One way) Expected speed 60 to 120 km/h Driver model IDM. 率を示す.単純併用方式,提案方式ともに車両流入量の増 加に伴って情報取得率が低下する.空いている交通状況と される,車両流入量が 100 vehicles/h/lane のときには,両 手法ともに約 1.0 の取得率を示し,手法間に差は無い.車 両密度が低いため通信負荷が小さく,帯域に余裕があるた めである.しかし,車両密度の増加に伴って手法間に性能 差があらわれ,車両流入量が 500 vehicles/h/lane の時には 提案方式が 0.77 を示すのに対し,単純併用方式は 0.66 を 示し,性能を改善している.これは,提案方式が輻輳の発. じ,128byte の情報を 100msec 間隔で交換することを想定 する.本シミュレーション条件での,見通しの良い場合の 車両の通信半径が約 500m であり,CACC 接近閾値は 400m とする.CACC 通信と拡張ビーコン通信は同一のチャネル を使って通信する. 評価指標として情報取得数,情報取得率,平均ショック ウェーブ伝播速度,最大ショックウェーブ伝播速度を測定 する.通信周期を調整することで通信負荷が低減し,情報 取得数ならびに情報取得率が改善することを確認する.そ して,効果的にショックウェーブ伝播速度を低減すること で平均ショックウェーブ伝播速度ならびに最大ショック ウェーブ伝播速度を低減することを確認する. 情報取得数 P は CACC 通信ならびに拡張ビーコン通信 のパケットを通信範囲内の車両から受信した回数である. 情報取得率 I を式 14 に示す. ) N ( 1 ∑ PCACC(k) + PExBeacon(k) ( ), I= N P′ + P′ k=1. CACC(k). 生に伴って通信周期を大きくするため,通信負荷が低下し, 情報取得率を改善するためと考えられる. 図 8 に車両流入量を変化させたときの車両平均情報取得 数を示す.単純併用方式,提案方式ともに車両流入量の増 加に伴って情報取得数が低下する.空いている交通状況と される,車両流入量が 100 vehicles/h/lane のときには,両 手法ともに約 50packets/s の取得数を示し,手法間に差は 無い.これは,両抑制手法が基本周期で通信した場合の値 に近く,情報取得率の測定と同様に車両密度が低いため通 信負荷が小さく,帯域に余裕があるためである.車両流入 量が 500 vehicles/h/lane のときに,提案方式は単純併用方 式よりも約 9.4%高い平均情報取得数を示す. 図 7 と図 8 から,提案方式は車両密度が高く通信負荷が 高い場合に通信周期を大きくすることで情報取得率を改 善すると同時に情報取得数を改善することがわかる.これ は,提案方式によって通信レートが低下するが,それ以上. (14). に輻輳の影響を低減でき,スループットが改善し通信性能 の低下を抑えることを意味する.. ExBeacon(k). ここで,Pk は車両 k から受信した情報数,Pk′ は車両 k が 受信すべき情報数,N は道路上を走行する車両台数を示す. 平均ショックウェーブ伝播速度 waverage を式 15 に示す. ∑N w(k) waverage = k=1 , (15) N ここで,wk は車両 k を通過するショックウェーブ速度を. (b) 平均,最大ショックウェーブ伝播速度 図 9 に車両流入量に対する平均ショックウェーブ伝播速 度を示す.全方式に共通して,車両流入量の増加に伴って ショックウェーブ伝播速度が増加することがわかる. 車両流入量が大きい場合,CACC 方式が最も高い平均 ショックウェーブ伝播速度を示し,車両流入量が 500 vehi-. 示し,N はショックウェーブを観測する車両台数を示す.. cles/h/lane のときに 4.5m/s である.これは,CACC が車. 最大ショックウェーブ伝播速度 wmax を式 16 に示す.. 群内でのショックウェーブ発生を抑制する手法であり,車. wmax = {m ∈ W | m ≥ a, ∀a ∈ W } ,. (16). 群走行に参加していない車両のショックウェーブ伝播を抑 制しないためである.さらに,CACC 通信損失が発生する. ここで,集合 W は車両 1 から N が観測したショックウェー. と車群からショックウェーブが発生するため,他方式と比. ブ伝播速度の集合,wmax は集合 W の最大元である.取得. して高い値を示す.単純併用方式も同様の理由から高車両. 情報率は CACC 通信と拡張ビーコン通信を通信周期調整せ. 流入量時に高い平均ショックウェーブ伝播速度を示す.拡. ずに併用する方式(以下,単純併用方式)と提案方式を比較. 張ビーコン方式を併用しているため,CACC 方式のみ使用. し,平均ショックウェーブ伝播速度と最大ショックウェー. した場合よりも低い値を示すが,CACC 通信の損失時に車. ブ伝播速度は拡張ビーコン方式と CACC 方式,CACC 通. 群からショックウェーブが発生するため,拡張ビーコン方. 信と単純併用方式ならびに提案方式を比較する.. 式のみ使用した場合よりも高い値を示す. 高車両流入量時に拡張ビーコン方式は CACC 方式のみ. 4.2 結果と考察. を使用した場合よりも低い平均ショックウェーブ伝播速度. (a) 情報取得率と情報取得数. を示し,車両流入量が 500vehicles/h/lane のときに 3.3m/s. ⓒ 2013 Information Processing Society of Japan. 5.
(6) Vol.2013-ITS-52 No.2 2013/3/16. 情報処理学会研究報告 IPSJ SIG Technical Report. 図 7. 車両流入量に対する平均情報取得率. Fig. 7 Average information arrival ratio against vehicle inflow. 図 8. 車両流入量に対する平均情報取得数. Fig. 8 Average number of received packet against vehicle inflow. 参考文献. 通信周期が長いため,通信負荷の影響を受けにくいためと. [1]. 考えられる.しかし,車両流入量が小さい場合には,拡張 ビーコン方式は他の方式に比して高い平均ショックウェー [2]. 効果が,CACC 方式に比して小さいためと考えられる. 提案方式はいずれの車両流入量においても,他方式に比し て低い平均ショックウェーブ伝播速度を示し,車両流入量が. 100vehicles/h/lane のときに 0.56m/s,500vehicles/h/lane. [3]. のときに 2.8m/s を示す.車両流入量が小さい場合には拡 張ビーコン方式の効果と CACC 方式の効果を同時に得ら. [4]. れるため,単純併用方式と同様に低い値を示す.車両流入 量が高い場合には,単純併用方式の性能は大きく低下する. [5]. のに対して,提案方式は性能低下を抑えている.情報取得 率と情報取得数の結果と合わせて,車両流入量が大きく通 信性能が低下する場合に,提案方式は単純併用方式に比し. [6]. て通信性能の低下を抑えるため,ショックウェーブ抑制効 果の低下を抑えると考えられる.. 5. おわりに. [7]. 本稿ではまず,ショックウェーブ発生抑制手法と伝播抑 制方式の特徴を確認した.次に単純併用方式が両手法の利. [8]. 点を併せ持つため,低車両密度時に高いショックウェーブ 抑制効果を示すが,高車両密度時に通信性能の低下に伴っ. [9]. てショックウェーブ抑制効果が低下し,発生抑制方式なら びに伝播抑制方式を単独で使用した場合よりも低い効果を 示すことを確認した.本稿では,通信負荷の高い高車両密. [10]. 度時に,各手法の損失によって発生するショックウェーブ 伝播速度が小さくなるように通信周期を制御することで ショックウェーブ抑制効果の性能低下を抑えることを確認. [11]. した.この結果によって提案方式が突発渋滞発生時の渋滞 の影響を抑制することが期待される.. ⓒ 2013 Information Processing Society of Japan. 車両流入量に対する平均ショックウェーブ 伝播速度. Fig. 9 Average shockwave propagation speed against vehicle inflow. である.これは,CACC 通信周期に比して拡張ビーコン. ブ伝播速度を示す.これは,拡張ビーコン方式による抑制. 図 9. [12]. Xu, Y., Wu, Y., Wu, G. and Sun, L.: Data Collection for the Detection of Urban Traffic Congestion By VANETs, Asia-Pacific Services Computing Conference (APSCC), pp. 405–410 (2010). Henrik Schumacher, C. P. and Slottke, E. N.: A simulation study of traffic efficiency improvement based on Carto-X communication, Proceedings of the sixth ACM international workshop on VehiculAr InterNETworking, pp. 13–22 (2009). Ahn, S. and Cassidy, M.: Freeway Traffic Oscillations and Vehicle Lane-Change Maneuvers, Transportation and Traffic Theory, pp. 691–710 (2007). Huang, D., Shere, S. and Ahn, S.: Dynamic highway congestion detection and prediction based on shock waves, ACM VehiculAr InterNETworking, pp. 11–20 (2010). Calvert, S., van den Broek, T. and van Noort, M.: Modelling cooperative driving in congestion shockwaves on a freeway network, IEEE Intelligent Transportation Systems, pp. 614 –619 (2011). Hegyi, A., Schutter, B. D. and Hellendoorn, J.: Optimal Coordination of Variable Speed Limits to Suppress Shock Waves, IEEE Transactions on Intelligent Transportation Systems, Vol. 6, No. 1 (2005). Zhang, J., Boitor, A. and Ioannou, P.: Design and evaluation of a roadway controller for freeway traffic, IEEE Conference on Intelligent Transportation Systems, pp. 543–548 (2005). Seki, K., Hamaguchi, M.: Inter-vehicle Communication for Truck Platooning (2nd report), Technical report, Vol.2010-ITS-43, No.5 (2010). van Arem, B., van Driel, C. and Visser, R.: The Impact of Cooperative Adaptive Cruise Control on TrafficFlow Characteristics, IEEE Intelligent Transportation Systems, Vol. 7, No. 4, pp. 429–436 (2006). Lei, C., van Eenennaam, E. M., Klein Wolterink, W., Karagiannis, G., Heijenk, G. J. and Ploeg, J.: Impact of Packet Loss on CACC String Stability Performance, ITS Telecommunications, pp. 381–386 (2011). Ohwada, Y., Maeno, T., Kaneda, S., Hisanaga, R. and Takai, M.: Realistic ITS Simulation with Scenargie Simulator, IPSJ DICOMO, pp. 233–234 (2008). Yoshimura, S., Nishikawa, H. and Moriyasu, S.: Development of Multi-Agent Traffic and Environmental Simulator MATES, Proceedings on Japan Society for Simulation Technology, Vol. 23, No. 3, pp. 228–237 (2004).. 6.
(7)
図


関連したドキュメント
I give a proof of the theorem over any separably closed field F using ℓ-adic perverse sheaves.. My proof is different from the one of Mirkovi´c
Keywords: continuous time random walk, Brownian motion, collision time, skew Young tableaux, tandem queue.. AMS 2000 Subject Classification: Primary:
n , 1) maps the space of all homogeneous elements of degree n of an arbitrary free associative algebra onto its subspace of homogeneous Lie elements of degree n. A second
This paper presents an investigation into the mechanics of this specific problem and develops an analytical approach that accounts for the effects of geometrical and material data on
The object of this paper is the uniqueness for a d -dimensional Fokker-Planck type equation with inhomogeneous (possibly degenerated) measurable not necessarily bounded
In the paper we derive rational solutions for the lattice potential modified Korteweg–de Vries equation, and Q2, Q1(δ), H3(δ), H2 and H1 in the Adler–Bobenko–Suris list.. B¨
The proof of the existence theorem is based on the method of successive approximations, in which an iteration scheme, based on solving a linearized version of the equations, is
While conducting an experiment regarding fetal move- ments as a result of Pulsed Wave Doppler (PWD) ultrasound, [8] we encountered the severe artifacts in the acquired image2.
