SPC-09-27
PWM
ホールドモデルに基づく IPM モータの過変調領域での制御法の提案
宮島孝幸
∗,藤本博志(横浜国立大学)
Proposal of Control Method for IPM Motor Based on PWM Hold Model in Overmodulation Range Takayuki Miyajima∗, Hiroshi Fujimoto (Yokohama National University)
Abstract
IPM motors are used for electric vehicle motors. So, control in overmodulation range is important for wide driving range. Usually, IPM motor is controled by using current vector control based on sinusoidal PWM or overmodulation PWM and voltage phase control on rectangular wave drive. However, we need to switch the structure of controller from current vector control to voltage phase control. In this paper, we propose control method based on PWM hold model in overmodulation range without the controller switchig and verify the proposed method by simulations and experiments.
キーワード:IPM モータ,過変調領域,PWM ホールドモデル,完全追従制御 (IPM motor, overmodulation range, PWM hold modle, perfect tracking control )
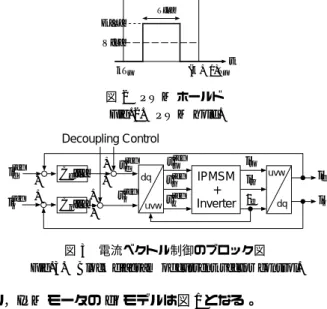
1. はじめに 永久磁石同期モータ (PM モータ) は誘導モータのように 2次銅損が発生しないため高効率である。また,ブラシ・ 整流子を用いないため保守性が高い。このため,産業界で 広く用いられている。PM モータには表面磁石同期モータ (SPMモータ) と埋込磁石同期モータ (IPM モータ) があり, IPMモータはマグネットトルクに加えてリラクタンストル クを利用できるため,高トルクが求められる電動車両用の 主機モータとして用いられている。 PMモータの制御方式の一つに正弦波 PWM に基づいた 電流ベクトル制御がある。この方式では出力電圧の高調波 成分を小さくすることができる。しかしながら,相電圧基 本波成分の最大値が Vdc/2 (Vdc: インバータ直流電源電圧) のために直流電源電圧利用率が悪く,駆動領域を制限して しまう。駆動領域を拡大するには電源電圧を上げれば良い が,インバータ素子の耐圧の面から好ましくない。 同じ電源電圧で駆動領域を拡大する方式として,過変調 PWMと矩形波駆動 (1 パルスモード) があり,中回転域で は過変調 PWM,高回転域では矩形波駆動を用いることで 駆動領域を拡大している(1) (2)。これらを用いる場合,正 弦波,過変調 PWM の電流ベクトル制御と矩形波駆動の電 圧位相制御の間に制御則の切り換えがあるため,切り換え 時に応答の乱れが発生する恐れがある。このため,正弦波 PWMから矩形波駆動までの領域を一つの制御則で制御で きることが求められている。 文献 (3) ではインバータの過変調領域の利用によって発 生する高調波電圧をモデル化し,それに基づいて発生した 高調波電流分を推定し,フィードバック電流から高調波成 分を除去することで電流を安定に制御することが提案され ている。文献 (4) では過変調領域においてモデル予測制御 に基づいた電流制御系とインバータのスイッチング制御を 一体化して制御することが提案されている。 1 Lds + R 1 Lqs + R 1 J s + D Kt vd vq + id 1 s + + iq T ωm θm v′ d v′ q ωeLd ωeLq − − + + Krt P Ke ωe 図 1 IPMモータの dq モデル Fig. 1. dq-model of IPM moter.
本論文では PWM ホールドモデルに基づいた制御法によ り IPM モータを正弦波 PWM の領域から過変調領域まで を制御することを提案し,シミュレーション及び実験結果か ら提案手法を検討する。さらに制御則に完全追従制御法(7) を用いることで目標電流への追従特性を向上させる。 2. モータモデルと離散化 〈2・1〉 IPM モータの dq モデル IPMモータの dq 座標における電圧方程式は式 (1) のようになる。 [ vd vq ] = [ R + sLd −ωeLq ωeLd R + sLq ][ id iq ] + [ 0 ωeKe ] (1) ただし,vd(q):d(q)軸電圧,R:電機子巻線抵抗,Ld(q):d(q) 軸インダクタンス (Ld̸= Lq),ωe:電気角速度,id(q):d(q)軸 電流,Ke:誘起電圧定数である。また,トルク T と機械角 速度 ωmは式 (2),(3) のようになる。 ωm= 1 J s + DT · · · (2) T = Ktiq+ Krtidiq · · · (3) ただし,J:イナーシャ,D:摩擦係数,Kt = P Ke,Krt = P (Ld− Lq),P :極対数である。式 (1)∼(3),ωe= P ωmよ
∆T [k] kTu (k + 1)Tu E[V] t V[k] 図 2 PWMホールド Fig. 2. PWM hold. vref q vrefd dq uvw vrefu vref v vref w IPMSM + Inverter Cd[z] Cq[z] irefd id iref q dq iq uvw iu iv + + − − Decoupling Control + + + + − θe 図 3 電流ベクトル制御のブロック図 Fig. 3. Block diagram of current vector control.
り,IPM モータの dq モデルは図 1 となる。 一般に dq モデルで制御を行う場合,式 (1) に式 (4),(5) で表される非干渉制御を施す。これにより電圧 vd(q)′ から出 力電流 id(q)までの特性が一次遅れ系となる。 vd= vd′ − ωeLqiq· · · (4) vq= vq′ + ωe(Ldid+ Ke) · · · (5) ここで,状態変数 x を電流 id(q),入力 u を電圧 vd(q)′ と すると IPM モータの連続時間状態・出力方程式は式 (6),(7) となる。 ˙ x(t) = Acx(t) + bcu(t), y = ccx(t)· · · ·(6) Ac=− R Ld(q) , bc= 1 Ld(q) , cc= 1· · · ·(7) 〈2・2〉 PWM ホールドに基づく離散化 制御対象を 離散化する際,単相インバータシステムでは図 2 のように 任意の出力電圧 V [k] は出力できず,0,±E[V](E:単相イン バータ直流電源電圧) しかとれない。このため,瞬時値を緻 密に制御したい場合には零次ホールドによる離散化は不適 切であるといえる。そこで,これを PWM ホールド(5) と 捉え,その幅を制御することを考える。制御対象の伝達関 数を式 (8) とおくと,式 (9),(10) のようにスイッチング時 間 ∆T [k] を制御入力とした緻密な離散時間状態方程式を得 ることができる。ただし,∆T [k] が負の時は−E[V] を出力 することにする。 ˙ x(t) = Acx(t) + bcu(t), y(t) = ccx(t)· · · (8) x[k + 1] = Asx[k] + bs∆T [k], y[k] = csx[k]· · · (9) As= eAcTu, bs= eAcTu/2bcE, cs= cc· · · · (10) 3. 制御系設計 〈3・1〉 従 来 法 〈3・1・1〉 電流ベクトル制御 式 (4),(5) の非干渉制御 を行った式 (6),(7) のプラントに対して,FB 制御器を式 (11) で表される極零相殺型の PI 制御器 Cd(q)(s)とする。 id ωeKe iq d-axis q-axis β ia ωeLqiq ωeLdid δ va Ria 図 4 定常状態における IPM モータのベクトル図 Fig. 4. Phasor diagram of IPM Motor on steady state.
vref w Tref + iu iv θe uvw dq iq id Torque Estimator − Testi PI Contoller δ Voltage Calculator vref u vref v IPMSM + Inverter 図 5 電圧位相制御のブロック図 Fig. 5. Block diagram of voltage phase control.
Cd(q)(s) = Ld(q)s + R τ s · · · (11) なお,τ = 10Tuとした。式 (11) を制御周期 Tuで Tustin 変換を用いて離散化を行うと,Cd(q)[z]を得る。3 相イン バータの制御入力は vref d ,v ref q を dq/3 相絶対変換により,
vrefu ,vrefv ,vrefw に変換し,三角波比較変調により決定する。
また,二相変調等により決定することもできる。図 3 にブ ロック図を示す。 〈3・1・2〉 電圧位相制御 矩形波駆動では電圧が一定 であるため,その位相を制御することでトルクを制御する。 本稿では電圧位相 δ を図 4 のようにおき,反時計回りを正 とする。電圧位相制御のブロック図を図 5 に示す。これは式 (3)を用いてトルク推定値 Testiを求め,トルク指令値 Tref との差が小さくなるように PI 制御器で電圧位相 δ を求め る。式 (12),(13) から δ を用いて vrefd , vqrefを求め,dq/3 相 絶対変換で 3 相の指令値に変換する。この指令値が 0 以上 のとき Vdc/2,それ以外は−Vdc/2にすることで矩形波パ ターンを生成・出力する。 vrefd =− sin δ · · · (12) vrefq = cos δ· · · (13) PI 制 御 器 は 比 例 ゲ イ ン KP=0.1745,積 分 ゲ イ ン KI=34.91とし,Tustin 変換により離散化したものとする。 また,電圧位相 δ には±π/2[rad] の制限を設けている。 〈3・1・3〉 電流ベクトル制御と電圧位相制御の切り替え 電流ベクトル制御の制御性能が保たれるのは変調率が 1.28 までである。そこで,dq 軸上の電圧ベクトルの大きさが電 源電圧の√3 2 1 2×1.28(絶対変換の場合) になったとき電流ベ クトル制御から電圧位相制御に切り替える。このとき,現 在の電圧位相 δ を用いて電圧位相制御器の初期値補償を行 う。また,電圧位相制御を行っているとき間には電流ベク トル制御器の積分は停止させる。 電圧位相制御から電流ベクトル制御に切り替える場合に
C2[z] + + + u0[k] y0[k] y[k] u[k] e[k] S (Tu) − Pc(s) y(t) PLANT B−1 (1 − z−1A ) S D z−1 C r(t) r[k] = xd[k + 1] C1[z] + + (Tu) 図 6 SR-PTCの構造
Fig. 6. Singlerate perfect tracking control system.
は,チャタリング防止のため dq 軸上の電圧ベクトルの大 きさが電源電圧の√3 2 1 2 × 1.1 になったとき電圧位相制御 から電流ベクトル制御に切り替える。なお,このときの dq 軸上の電圧ベクトルの大きさは式 (1) に電流ベクトル制御 の場合の指令値を代入し,電流ベクトル制御を行っている 場合の電圧値を推定したものを用いる(6) 。 〈3・2〉 完全追従制御法 完全追従制御法 (PTC) は図 6に示すようにフィードフォワード (FF) 制御器 C1[z]と フィードバック (FB) 制御器 C2[z]を有する 2 自由度制御系 の構造をしている。FF 制御器はプラントの安定な逆システ ムとなっており,ノミナルプラントに対してはサンプル点 上で完全に追従誤差が零になることが補償されている。FB 制御器は外乱やプラント変動がある場合に追従誤差を抑圧 する。n 次のプラントに対しては 1 サンプル点間に制御入 力を n 回切り換えるマルチレート制御により完全追従が補 償される。本稿では式 (6),(7) に示すように制御対象が 1 次 であるため,シングルレート制御で PTC が実現できる。 式 (14) の離散時間状態方程式を用いて,安定な逆システ ム, ノミナルな出力 y0[k]は式 (15),(16) で求まる。
x[k + 1] = Ax[k] + Bu[k], y[k] = Cx[k]· · · ·(14)
u0[k] = B−1(I− z−1A)xd[k + 1]· · · ·(15) y0[k] = z−1Cxd[k + 1] + Du0[k]· · · ·(16) 〈3・3〉 提 案 法 〈3・3・1〉 制御器の設計 式 (6),(7) のプラントに対し て,E = Vdcとして PWM ホールドに基づき離散化を行う と,式 (17) で表される入力 u[k] を時間入力 ∆Td(q)[k]とす る離散時間系のプラントの状態方程式を得る。これにより 式 (15),(16) から FF 制御器を得る。PTC は 1 サンプル先 の状態変数の目標軌道を与えることを特徴としており,状 態変数が電流であるため目標電流軌道を与える。 A = e− R Ld(q)Tu , B = e− R Ld(q)Tu2 1 Ld(q) Vdc, C = 1(17) また,FB 制御器は従来法と同じ PI 制御器 Cd(q)[z]であ る。q 軸におけるブロック図を図 7 に示す。 〈3・3・2〉 制御入力導出法 提案法における 3 相イン バータの制御入力導出法は文献 (8) で提案されている厳密法 に基づくものである。なお,本稿では文献 (8) とは異なり, 座標変換行列を絶対変換として考える。この方式では,制御 器出力 ∆Td,∆Tqを式 (18) の dq/2 相変換により ∆Tα,∆Tβ に変換し,図 8 より領域を決定する。各領域ごとに出力ベ B−1 (1 − z−1A ) z−1C iref q [k] = xd[k + 1] C1[z] C2[z] + + + iq0[k] iq[k] ∆Tq[k] e[k] S (Tu) − ∆Tq0[k] iq(t) Tu Vdc Tu Vdc + Decoupling Control 図 7 提案法のブロック図 (q 軸)
Fig. 7. Block diagram of proposed method for q-axis current. α β V1 V2 V3 V4 V6 V5 V0 ∆Tβ ∆Tα ∆T1 ∆T2 ΙΙ Ι ΙΙΙ ΙV V Ι V (0,0,0) (0,1,1) (1,0,0) U V W (1,0,1) (0,0,1) (0,1,0) (1,1,0) θ 図 8 空間ベクトル変調 Fig. 8. Space vector modulation.
Vdc[V] Vuv Vj r 3/2(∆Ti+ ∆Tj) −Vdc[V] Vvw r 3/2∆Tj Vwu v u u u u t 3 2 ∆Ti 2 V0 Vi kTu (k + 1)Tu Vi V0 v u u u u t 3 2 ∆Ti 2 −Vdc[V] 図 9 線間電圧のパルス Fig. 9. Pulse of line voltage.
クトルとスイッチング時間と出力順序が決定され,領域 VI では図 9 のようなパルスを出力することになる。詳しくは 文献 (8) を参考にされたい。ただし,各相のスイッチング 時間は絶対変換のため√3 2∆Ti,j となる。なお,この方式 では線間電圧を制御しているため,3n 次調波注入変調と同 様に線形領域の直流電源電圧利用率が 15% 改善される。 [ ∆Tα ∆Tβ ] = [ cos θe − sin θe sin θe cos θe ][ ∆Td ∆Tq ] · · · (18) 〈3・3・3〉 制御入力飽和時の出力ベクトル選択法 提 案法での制御入力飽和の条件は√3 2(∆Ti+ ∆Tj) > Tuで ある。このとき制御入力には√3 2(∆Ti+ ∆Tj) = Tuの制 限がかかるため,d,q 軸のスイッチング時間を同時に満たす ことはできなくなる。ここで,制御入力が飽和した場合の 出力ベクトル選択法を考える。文献 (9) では空間ベクトル 変調において,制御入力の電圧ベクトルが飽和する場合に はその電圧ベクトルの大きさと位相を操作することで切り 替え無しで過変調,矩形波駆動を実現する手法が提案され ている。本論文では dq 軸上のスイッチング時間 ∆Td, ∆Tq を操作していくことで過変調,矩形波駆動を実現させる手 法を提案する。 矩形波駆動では零ベクトル V0は出力せず,電気角に同 期して π/3[rad] ごとに V1 ∼ V6を順々に出力していくも のである。ここで,空間ベクトル変調の延長で矩形波駆動 になると考えると,矩形波駆動となる指令値が与えられた 場合にはその位置に応じて 6 つのベクトルのどれに近似
して出力すればよいかが決められる。そこで,6 つのベク トルに優先度をもたせる領域を設ける。これは各ベクトル を中心にした±π/6[rad] の範囲とする。ベクトル V1 では −π/6 ≤ θ < π/6 となる。制御入力が飽和した場合には指 令値がどの領域にいるか判断する。そして,∆Ti,∆Tjの 内,指令値がある領域で優先度をもつ方のスイッチング時 間を優先に出力する。ここで,矩形波駆動における dq 軸上 のスイッチング時間の基本波成分は√3 2 2 πTuであるため, dq軸上のスイッチング時間の大きさ|Tdq| が |Tdq| = √ ∆T2 d + ∆Tq2≥ √ 3 2 2 πTu · · · (19) の場合には矩形波駆動になればよい。そこで,領域 I∼VI の 中央に指令値がある場合を考える。この位置は各ベクトル が優先権を持つ領域の境界であり,矩形波駆動になるよう に操作したときには指令値の位置と実出力の位置 (V1∼ V6 のどれか) の差が一番大きい。一例として θ = π/6[rad] に ついて考える。この位置ではベクトル V2が優先権を持つ。 |Tdq| = √3 2 2 πTuのとき矩形波駆動になればよいが,各ベ クトルのスイッチング時間は √ 3 2∆T1= √ 3 2∆T2= √ 3 π Tu · · · (20) であり,2 つのベクトルを出力するため矩形波駆動にはな らない。このとき矩形波駆動するためには T2に√π 3 をかけ ることで,√3 2∆T1 = 0, √3 2∆T2= Tuにする必要がある。 このため,優先権を持つベクトルに重み付けをする。制御 入力が飽和する場合の|Tdq| の条件は |Tdq| > Tu √ 2· · · (21) である。この条件を満たす場合には,∆Ti or jに重み付け 係数 k をかける。最終的には式 (19) を満たす場合に矩形波 駆動となれば良いので,重み付け係数 k は 1≤ k ≤ √π 3 の 範囲となる。なお,重み付け係数 k は飽和が小さいときに は重み付けは小さく,その逆の場合には大きくする必要が あるため,重み付け係数 k は図 10 のようになり,実装す る際にはマップ又は関数化すればよい。本論文では関数で 与えてはいるが,指令値と出力の基本波成分が一致する k を与えているわけではない。そして,Tu間の残った時間で もう一方のベクトルを出力する。このように指令値を操作 することでベクトル V1∼ V6に近似していき,矩形波駆動 に移行させる。 以上の手順を図 11 の場合を例として説明する。このとき 指令値のスイッチング時間 T は V2が優先となる領域にあ り,式 (21) を満たしているとする。このときは V2に優先 度があるのでそのスイッチング時間は重み付け係数 k をか け ∆T2′ = k∆T2となる。このとき, √3 2(∆T ′ 2+ ∆T1) > Tu ならば,√3 2∆T2′は制限を加えず,Tu間の余った時間でも う一方のベクトル V1を出力すると,√3 2∆T1から √3 2∆T1′ に縮められ,実際のスイッチング時間は図 11 の T0となる。 |Tdq| k 1 π √ 3 Tu √ 2 v u u t 3 2 2 πTu 図 10 重み付け係数 k Fig. 10. Weight factor k
V1 V2 V0 T T′ v u u t 3 2∆T1 q 3/2∆T′ 2 q 3/2∆T2 v u u t 3 2∆T ′ 1 q 3/2∆T2 q 3/2∆T′ 2 図 11 制御入力飽和時の ベクトル選択 Fig. 11. Selection of vector on saturation of control input 表 1 IPMモータパラメータ
Table 1. Parameters of IPM motor. d-axis Inductance Ld 1.107[mH]
q-axis Inductance Lq 2.206[mH]
Resistance R 154.9[mΩ] Pairs of poles P 3 Induced voltage constant Ke 44.96[mV/(rad/s)]
Inertia J 5.4× 10−3[kgm2] Viscous friction D 2.6× 10−3[Nm/(rad/s)]
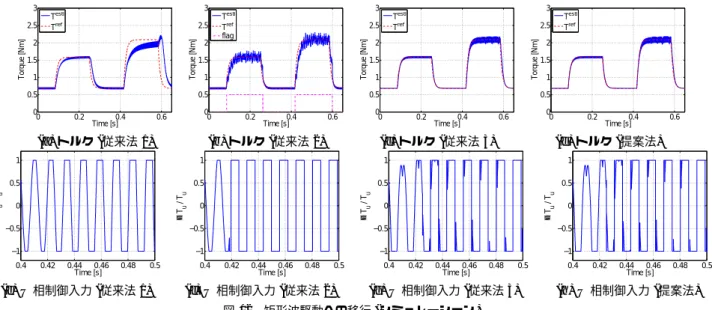
4. シミュレーション IPMモータパラメータを表 1 に示す。また,制御周期 Tuは 0.1[msec],インバータ直流電源電圧 Vdcは 36.0[V] と する。 以下,電流ベクトル制御と電圧位相制御の切り替え無し かつ三角波比較変調で出力するものを従来法 1,切り替え有 りかつ三角波比較変調で出力するものを従来法 2,切り替 え無しかつ空間ベクトル変調で出力するものを従来法 3 と する。なお,従来法 3 において制御入力飽和時の出力ベク トル選択法は提案法と同じ手法を用いている。つまり,従 来法 3 は提案法から FF 制御器を除いたものである。また, 電流ベクトル制御及び提案法の d,q 軸電流指令値は最大ト ルク/電流制御(10)となるように選ぶ。 〈4・1〉 矩 形 波 駆 動 へ の 移 行 負 荷 モ ー タ に よ り ωe=510[rad/s] で 速 度 制 御 さ れ て い る と し て ,方 形 波 (3.0[Hz])を LPF(時定数 10[msec]) に通したものをトルク 指令値とし,その振幅を増やしていった。シミュレーショ ンの結果を図 12 に示す。従来法 2 の “flag” は制御則切り 替え信号であり,“H” のとき電圧位相制御,“L” のとき電 流ベクトル制御を行う。また,∆Tuは U 相における 1 サン プル点間の Vdc/2を出力する期間と−Vdc/2を出力する期 間の差である。矩形波駆動の場合には ∆Tu/Tuは 1(Vdc/2 のみ出力) または−1(−Vdc/2のみ出力) の矩形波となる。 従来法 1 では出力電圧不足のため追従特性が悪化してい る。また,ワインドアップにより指令値が減少している時 刻 0.25,0.59[sec] においても追従できていない。従来法 2 は 電流ベクトル制御と電圧位相制御を切り替えており,切り 替え時に応答が乱れている。また,矩形波駆動となってい るためトルクリプルが大きい。
0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 Time [s] Torque [Nm] Testi Tref (a)トルク (従来法 1) 0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 Time [s] Torque [Nm] Testi Tref flag (b)トルク (従来法 2) 0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 Time [s] Torque [Nm] Testi Tref (c)トルク (従来法 3) 0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 Time [s] Torque [Nm] Testi Tref (d)トルク (提案法) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 Time [s] ∆ Tu /T u (e) U相制御入力 (従来法 1) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 Time [s] ∆ Tu / T u (f) U相制御入力 (従来法 2) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 Time [s] ∆ Tu / T u (g) U相制御入力 (従来法 3) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 Time [s] ∆ Tu / T u (h) U相制御入力 (提案法) 図 12 矩形波駆動への移行 (シミュレーション)
Fig. 12. Simulation result of transition to rectangular wave drive.
提案法,従来法 3 では従来法 1 よりも線形領域での直流 電源電圧利用率が 15% 改善されている上に,制御入力飽和 時の出力ベクトル選択法によりのトルクリプルが小さいま ま高いトルク指令値に追従している。また,制御則の切り 替えが無いため,従来法 2 のように応答の乱れが無い。し かしながら,制御入力の飽和時には追従特性が悪化してお り,PTC を用いた効果が現れていない。このため,提案法 と従来法 3 では差が現れていない。 〈4・2〉 目標トルク追従特性 負荷モータの速度制御 により ωe=440[rad/s]とし,トルク指令値 Tref を周波数 60[Hz]の正弦波で変動させた。シミュレーション結果を図 13に示す。 従来法 1 では飽和による出力電圧不足と正弦波の内部モ デルを持たないため指令値に追従できていない。従来法 2 では矩形波駆動に切り替えることで従来法 1 よりは特性が 改善されているが,追従はできていない。また,従来法 3 ではトルクの振幅は改善しているが,追従はできていない。 一方,提案法では PTC を用いていることで従来法とは 異なり,正弦波の指令値に対しても追従できている。完全 追従はしていないのは制御入力飽和の影響であるが,飽和 量が少ないため応答の乱れが少なく,従来法よりも高い追 従特性が得られている。 5. 実 験 〈5・1〉 矩 形 波 駆 動 へ の 移 行 負 荷 モ ー タ に よ り ωe=360[rad/s]に速度制御して実験を行った。結果を図 14 に 示す。シミュレーション結果と同様の結果が得られている。 〈5・2〉 目 標 ト ル ク 追 従 特 性 負 荷 モ ー タ に よ り ωe=360[rad/s]に速度制御して実験を行った。結果を図 15 に示す。シミュレーション結果と同様に PTC を用いた提 案法の目標値追従特性が高いといえる。 6. ま と め 本稿では PWM ホールドに基づいた提案法において制御 入力飽和の出力ベクトル選択法を示した。シミュレーション 及び実験にて過変調領域において,従来法では矩形波駆動 に切り替わるためトルクリプルが増大する領域でも提案法 ではトルクリプルを小さくできることを示した。また,提 案法は PTC を用いているため目標電流追従特性が高いこ とを示した。しかしながら,制御入力の飽和時には完全追 従が達成できず,追従特性が悪化している。 今後は高調波成分を最小限に抑えつつ目標トルク追従特 性が高くなるように制御入力飽和時の出力ベクトル選択法 を修正した上で,アンチワインドアップも行い追従特性を 向上させる。 参考文献
( 1 ) H. Nakai, H. Ohtani, E. Satoh, and Y. Inaguma:“Dev-elopment and Testing of the Torque Control for the Permanent-Magnet Synchronous Motors”, IEEE Trans. Ind. Electron., Vol.52, No.3, pp800-806(2005) ( 2 ) H. Nakai, H. Ohtani, E. Satoh, and Y. Inaguma:“Novel
Torque Control Technique for High Efficiency/High Power Interior Permanent Magnet Synchronous Mo-tors”, R&D Review of Toyota CRDL, Vol.40, No.2, pp44-49(2005)
( 3 ) S. Lerdudomsak, S. Doki, S. Okuma:“A Novel Current Control System for PMSM Considering Effects from Inverter in Overmodulation Range”,PEDS’07, pp.794-800(2007)
( 4 ) H. Kobayashi, H. Kitagawa, S. Doki, S. Okuma:“Reali-zation of a Fast Current Control System of PMSM based on Model Predictive Control”, The 34th Annual Conference of the IEE Industrial Electronics Society, pp.1343-1348, Florida, USA(2008)
( 5 ) K. P. Gokhale, A. Kawamura, and R. G. Hoft:“Deat Beat Microprocessor Control of PWM Inverter for Si-nusoidal Output Waveform Synthesis”, IEEE Trans.
0 10 20 30 0 0.5 1 1.5 2 2.5 Time [ms] Torque [Nm] Testi Tref (a)トルク (従来法 1) 0 10 20 30 0 0.5 1 1.5 2 2.5 Time [ms] Torque [Nm] Testi Tref (b)トルク (従来法 2) 0 10 20 30 0 0.5 1 1.5 2 2.5 Time [ms] Torque [Nm] Testi Tref (c)トルク (従来法 3) 0 10 20 30 0 0.5 1 1.5 2 2.5 Time [ms] Torque [Nm] Testi Tref (d)トルク (提案法) 図 13 目標トルク追従特性 (シミュレーション)
Fig. 13. Simulation result of torque tracking characteristic.
0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 time [s] Torque [Nm] Testi Tref (a)トルク (従来法 1) 0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 time [s] Torque [Nm] Testi Tref flag (b)トルク (従来法 2) 0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 time [s] Torque [Nm] Testi Tref (c)トルク (従来法 3) 0 0.2 0.4 0.6 0 0.5 1 1.5 2 2.5 3 time [s] Torque [Nm] Testi Tref (d)トルク (提案法) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 time [s] ∆ Tu /Tu (e) U相制御入力 (従来法 1) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 time [s] ∆ Tu /Tu (f) U相制御入力 (従来法 2) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 time [s] ∆ Tu /Tu (g) U相制御入力 (従来法 3) 0.4 0.42 0.44 0.46 0.48 0.5 −1 −0.5 0 0.5 1 time [s] ∆ Tu /Tu (h) U相制御入力 (提案法) 図 14 矩形波駆動への移行 (実験)
Fig. 14. Experiment result of transition to rectangular wave drive.
0 10 20 30 0 0.5 1 1.5 2 2.5 time [ms] Torque [Nm] Testi Tref (a)トルク (従来法 1) 0 10 20 30 0 0.5 1 1.5 2 2.5 time [s] Torque [Nm] Testi Tref flag (b)トルク (従来法 2) 0 10 20 30 0 0.5 1 1.5 2 2.5 time [ms] Torque [Nm] Testi Tref (c)トルク (従来法 3) 0 10 20 30 0 0.5 1 1.5 2 2.5 time [ms] Torque [Nm] Testi Tref (d)トルク (提案法) 図 15 目標トルク追従特性 (実験)
Fig. 15. Experiment result of torque tracking characteristic.
Ind. Appl., Vol.23, No.3, pp901-910(1987)
( 6 ) 井 村 彰 宏:「 多 相 回 転 機 の 制 御 装 置 」 ,特 開 2008-206383(2008)
( 7 ) H. Fujimoto, Y. Hori, and A. Kawamura:“Perfect Tracking Control Method Based on Multirate Feed-forward Control”, T.SICE, Vol.36, No.9, pp766-772(2000)(in Japanese)
( 8 ) K. Sakata, H. Fujimoto:“Perfect Tracking Control of Servo Motor Based on Precise Model Considering Cur-rent Loop and PWM Hold”, T.IEEJapan, Vol.127-D, No.6, pp587-593(2007)(in Japanese)
( 9 ) J. Holtz, W. Lotzkat and A.M.Khambadkone:“On
Con-tinuous Control of PWM Inverters in Overmodulation Range Including the Six-Step”, IEEE Trans. Power Electron, Vol.8, No.4, pp546-553(1993)
(10) 武田洋次・森本茂雄・松井信行・本田幸夫:「埋込磁石同 期モータの設計と制御」,オーム社 (2001)